
Что такое статическая память c
Виды памяти
Существует 3 типа памяти: статический, автоматический и динамический.
Статический — выделение памяти до начала исполнения программы. Такая память доступна на протяжении всего времени выполнения программы. Во многих языках для размещения объекта в статической памяти достаточно задекларировать его в глобальной области видимости.
Автоматический, также известный как «размещение на стеке», — самый основной, автоматически выделяет аргументы и локальные переменные функции, а также прочую метаинформацию при вызове функции и освобождает память при выходе из неё.
Стек, как структура данных, работает по принципу LIFO («последним пришёл — первым ушёл»). Другими словами, добавлять и удалять значения в стеке можно только с одной и той же стороны.
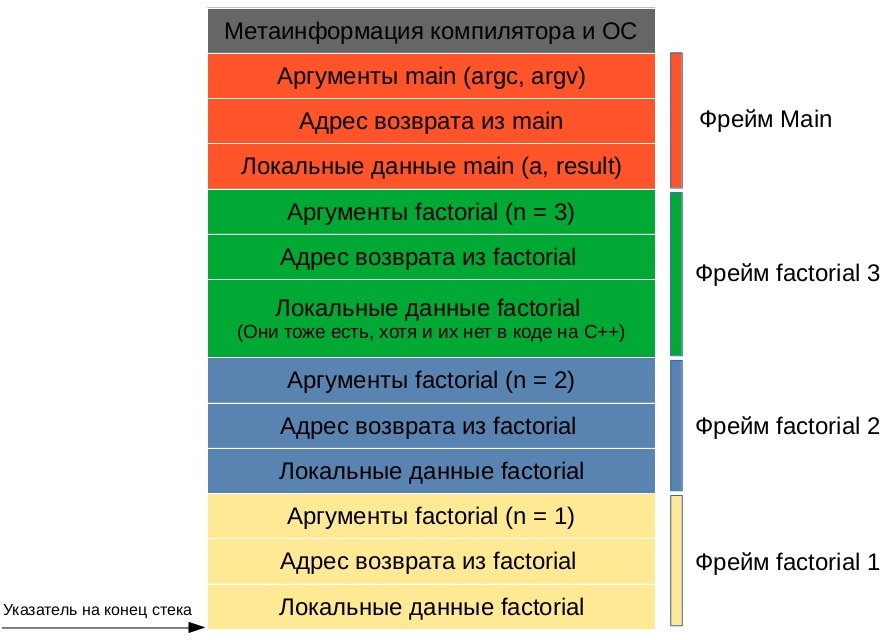
Автоматическая память работает именно на основе стека, чтобы вызванная из любой части программы функция не затёрла уже используемую автоматическую память, а добавила свои данные в конец стека, увеличивая его размер. При завершении этой функции её данные будут удалены с конца стека, уменьшая его размер. Длина стека останется той же, что и до вызова функции, а у вызывающей функции указатель на конец стека будет указывать на тот же адрес.
Проще всего это понять из примера на С++:
Стек при вызове последней рекурсивной функции будет выглядеть следующим образом:
Детали реализации автоматической памяти могут быть разными в зависимости от конкретной платформы. Например, кому очищать из стека метаинформацию функции и её аргументы: вызывающей функции или вызываемой? Как передавать результат: через стек или, что намного быстрее, через регистры процессора (память, расположенную прямо на кристалле процессора. В этой статье не рассматривается, т. к. в языках программирования высокого уровня зачастую нет прямого доступа к регистрам процессора). На все эти вопросы отвечает конкретная реализация calling convention — описание технических особенностей вызова подпрограмм, определяющее способы передачи параметров/результата функции и способы вызова/возврата из функции.
Таким образом, когда одна функция вызывает другую, последняя всегда в курсе, где ей взять свои аргументы: на конце стека. Но откуда ей знать, где конец стека? В процессоре для этого есть специальный регистр, хранящий указатель на конец стека. В большинстве случаев стек расположен ближе к концу виртуальной памяти и растёт в сторону начала.
Размер автоматической памяти, а он тоже фиксированный, определяется линковщиком (обычно — 1 мегабайт), максимальный размер зависит от конкретной системы и настроек компилятора/линковщика.
Если приложение выйдет за максимум автоматической памяти, его там может ждать Page Fault (сигнал SIGSEGV в POSIX-совместимых системах: Mac OS X, Linux, BSD и т. д.) — ошибка сегментации, приводящая к аварийному завершению программы.
Динамическая — выделение памяти из ОС по требованию приложения.
Автоматическая и статическая память выделяются единоразово перед запуском программы. При их нехватке, либо если модель LIFO не совсем подходит, используется динамическая память.
Приложение при необходимости может запросить у ОС дополнительную память через аллокатор или напрямую через системный вызов. Пример использования динамической памяти с помощью аллокатора ниже на примере языка Си.
После выделения памяти в распоряжение программы поступает указатель на начало выделенной памяти, который, в свою очередь, тоже должен где-то храниться: в статической, автоматической или также в динамической памяти. Для возвращения памяти обратно в аллокатор необходим только сам указатель. Попытка использования уже очищенной памяти может привести к завершению программы с сигналом SIGSEGV.
Языки сверхвысокого уровня используют динамическую память как основную: создают все или почти все объекты в динамической памяти, а на стеке или в статической памяти держат указатели на эти объекты.
Максимальный размер динамической памяти зависит от многих факторов: среди них ОС, процессор, аппаратная архитектура в целом, не говоря уже о самом очевидном — максимальном размере ОЗУ у конкретного устройства. Например x86_64 процессоры используют только 48 бит для адресации виртуальной памяти, что позволяет использовать до 256 ТБ памяти. В следующей статье про более низкоуровневую архитектуру памяти будет объяснено, почему не все 64 бита.
Способы контроля динамической памяти
Из-за сложности программ очень трудно определить, когда необходимо освобождать память в ОС, и это вторая явная проблема динамической памяти. Если забыть вызвать munmap() или free() , то произойдет следующая ситуация: приложению память уже не нужна, но ОС всё ещё будет считать, что эта память используется программой. Эту проблему называют «утечкой памяти». Существуют несколько способов автоматического или полуавтоматического решения этой проблемы:
RAII (Получение ресурса есть инициализация) — в ООП — организация получения доступа к ресурсу в конструкторе, а освобождения — в деструкторе соответствующего класса. Достаточно реализовать управление памятью в конструкторах и деструкторах, а компилятор вызовет их автоматически. Например, немного урезанный класс String из статьи про Move-семантику. Выделяем память в конструкторе, очищаем в деструкторе:
Умные указатели на основе RAII — указатели, автоматически владеющие динамической памятью, то есть автоматически освобождающие её, когда она больше не нужна. Умные указатели инкапсулируют только управление памятью объекта, но не сам объект, как, например, происходит в String, который инкапсулирует объект целиком. Примеры умных указателей ниже.
std::unique_ptr — класс уникального указателя, является единственным владельцем памяти и очищает её в своём деструкторе. Поэтому объекты класса std::unique_ptr не могут иметь копий, но могут быть перемещены. Подробнее о семантике перемещения в этой статье.
std::shared_ptr — класс общего указателя, использующий атомарный счётчик ссылок для подсчёта количества владельцев памяти. В конструкторе счётчик инкрементируется, в деструкторе — декрементируется. Как только счётчик становится равным нулю, память освобождается.
Но у std::shared_ptr есть проблема, например, когда объект A ссылается на объект B, а объект B ссылается на объект A. В таком случае у обоих объектов счётчик ссылок никогда не будет меньше 1 и произойдёт утечка памяти. Решений у этой проблемы два. Использование std::weak_ptr , который ссылается на объект, но без счётчика ссылок, и не может быть разыменован без предварительной конвертации в std::shared_ptr . Вторым решением этой проблемы является сборщик мусора.
Сборка мусора — одна из форм автоматического управления динамической памятью, которая помечает все доступные из стека или статической памяти динамически выделенные объекты. Объекты, до которых нельзя добраться через цепочку указателей, начиная с автоматической или статической памяти, т. е. не помеченные сборщиком мусора, очищаются.
Умные указатели и RAII используются в основном в относительно низкоуровневых языках, например, С++ или Swift. В более высокоуровневых языках обычно используется сборщик мусора (Java), хотя может применяться комбинация умного указателя и сборщика мусора (Python).
У каждого способа управления динамической памятью есть свои плюсы и минусы. В основном приходится жертвовать производительностью программы ради скорости и простоты разработки, либо наоборот: высокая производительность, но и высокая требовательность к программистам, из-за чего вероятность ошибиться при разработке программы выше и медленней сам процесс.
В традиционных языках программирования, таких как Си , Фортран, Паскаль , существуют три вида памяти: статическая, стековая и динамическая . Конечно, с физической точки зрения никаких различных видов памяти нет: оперативная память - это массив байтов, каждый байт имеет адрес , начиная с нуля. Когда говорится о видах памяти, имеются в виду способы организации работы с ней, включая выделение и освобождение памяти , а также методы доступа.
Статическая память
Статическая память выделяется еще до начала работы программы, на стадии компиляции и сборки. Статические переменные имеют фиксированный адрес, известный до запуска программы и не изменяющийся в процессе ее работы. Статические переменные создаются и инициализируются до входа в функцию main , с которой начинается выполнение программы.
Существует два типа статических переменных:
- глобальные переменные - это переменные, определенные вне функций, в описании которых отсутствует слово static . Обычно описания глобальных переменных, включающие слово extern , выносятся в заголовочные файлы (h-файлы). Слово extern означает, что переменная описывается, но не создается в данной точке программы. Определения глобальных переменных, т.е. описания без слова extern , помещаются в файлы реализации (c-файлы или cpp-файлы). Пример: глобальная переменная maxind описывается дважды:
- в h-файле с помощью строки
- Статическую переменную можно описать и внутри функции, хотя обычно так никто не делает. Переменная размещается не в стеке, а в статической памяти, т.е. ее нельзя использовать при рекурсии, а ее значение сохраняется между различными входами в функцию. Область видимости такой переменной ограничена телом функции, в которой она определена. В остальном она подобна статической или глобальной переменной. Заметим, что ключевое слово static в языке Си используется для двух различных целей:
- как указание типа памяти: переменная располагается в статической памяти, а не в стеке;
- как способ ограничить область видимости переменной рамками одного файла (в случае описания переменной вне функции).
Стековая, или локальная, память
Локальные, или стековые, переменные - это переменные, описанные внутри функции. Память для таких переменных выделяется в аппаратном стеке, см. раздел 2.3.2. Память выделяется в момент входа в функцию или блок и освобождается в момент выхода из функции или блока. При этом захват и освобождение памяти происходят практически мгновенно, т.к. компьютер только изменяет регистр, содержащий адрес вершины стека.
Локальные переменные можно использовать при рекурсии, поскольку при повторном входе в функцию в стеке создается новый набор локальных переменных, а предыдущий набор не разрушается. По этой же причине локальные переменные безопасны при использовании нитей в параллельном программировании (см. раздел 2.6.2). Программисты называют такое свойство функции реентерабельностью, от англ. re-enter able - возможность повторного входа. Это очень важное качество с точки зрения надежности и безопасности программы! Программа, работающая со статическими переменными, этим свойством не обладает, поэтому для защиты статических переменных приходится использовать механизмы синхронизации (см. 2.6.2), а логика программы резко усложняется. Всегда следует избегать использования глобальных и статических переменных, если можно обойтись локальными.
Недостатки локальных переменных являются продолжением их достоинств. Локальные переменные создаются при входе в функцию и исчезают после выхода из нее, поэтому их нельзя использовать в качестве данных, разделяемых между несколькими функциями. К тому же, размер аппаратного стека не бесконечен, стек может в один прекрасный момент переполниться (например, при глубокой рекурсии), что приведет к катастрофическому завершению программы. Поэтому локальные переменные не должны иметь большого размера. В частности, нельзя использовать большие массивы в качестве локальных переменных.
Динамическая память, или куча
Помимо статической и стековой памяти, существует еще практически неограниченный ресурс памяти, которая называется динамическая, или куча ( heap ). Программа может захватывать участки динамической памяти нужного размера. После использования ранее захваченный участок динамической памяти следует освободить.
Под динамическую память отводится пространство виртуальной памяти процесса между статической памятью и стеком. (Механизм виртуальной памяти был рассмотрен в разделе 2.6.) Обычно стек располагается в старших адресах виртуальной памяти и растет в сторону уменьшения адресов (см. раздел 2.3). Программа и константные данные размещаются в младших адресах, выше располагаются статические переменные. Пространство выше статических переменных и ниже стека занимает динамическая память:
В традиционных языках программирования, таких как Си , Фортран, Паскаль , существуют три вида памяти: статическая, стековая и динамическая . Конечно, с физической точки зрения никаких различных видов памяти нет: оперативная память - это массив байтов, каждый байт имеет адрес , начиная с нуля. Когда говорится о видах памяти, имеются в виду способы организации работы с ней, включая выделение и освобождение памяти , а также методы доступа.
Статическая память
Статическая память выделяется еще до начала работы программы, на стадии компиляции и сборки. Статические переменные имеют фиксированный адрес, известный до запуска программы и не изменяющийся в процессе ее работы. Статические переменные создаются и инициализируются до входа в функцию main , с которой начинается выполнение программы.
Существует два типа статических переменных:
- глобальные переменные - это переменные, определенные вне функций, в описании которых отсутствует слово static . Обычно описания глобальных переменных, включающие слово extern , выносятся в заголовочные файлы (h-файлы). Слово extern означает, что переменная описывается, но не создается в данной точке программы. Определения глобальных переменных, т.е. описания без слова extern , помещаются в файлы реализации (c-файлы или cpp-файлы). Пример: глобальная переменная maxind описывается дважды:
- в h-файле с помощью строки
- Статическую переменную можно описать и внутри функции, хотя обычно так никто не делает. Переменная размещается не в стеке, а в статической памяти, т.е. ее нельзя использовать при рекурсии, а ее значение сохраняется между различными входами в функцию. Область видимости такой переменной ограничена телом функции, в которой она определена. В остальном она подобна статической или глобальной переменной. Заметим, что ключевое слово static в языке Си используется для двух различных целей:
- как указание типа памяти: переменная располагается в статической памяти, а не в стеке;
- как способ ограничить область видимости переменной рамками одного файла (в случае описания переменной вне функции).
Стековая, или локальная, память
Локальные, или стековые, переменные - это переменные, описанные внутри функции. Память для таких переменных выделяется в аппаратном стеке, см. раздел 2.3.2. Память выделяется в момент входа в функцию или блок и освобождается в момент выхода из функции или блока. При этом захват и освобождение памяти происходят практически мгновенно, т.к. компьютер только изменяет регистр, содержащий адрес вершины стека.
Локальные переменные можно использовать при рекурсии, поскольку при повторном входе в функцию в стеке создается новый набор локальных переменных, а предыдущий набор не разрушается. По этой же причине локальные переменные безопасны при использовании нитей в параллельном программировании (см. раздел 2.6.2). Программисты называют такое свойство функции реентерабельностью, от англ. re-enter able - возможность повторного входа. Это очень важное качество с точки зрения надежности и безопасности программы! Программа, работающая со статическими переменными, этим свойством не обладает, поэтому для защиты статических переменных приходится использовать механизмы синхронизации (см. 2.6.2), а логика программы резко усложняется. Всегда следует избегать использования глобальных и статических переменных, если можно обойтись локальными.
Недостатки локальных переменных являются продолжением их достоинств. Локальные переменные создаются при входе в функцию и исчезают после выхода из нее, поэтому их нельзя использовать в качестве данных, разделяемых между несколькими функциями. К тому же, размер аппаратного стека не бесконечен, стек может в один прекрасный момент переполниться (например, при глубокой рекурсии), что приведет к катастрофическому завершению программы. Поэтому локальные переменные не должны иметь большого размера. В частности, нельзя использовать большие массивы в качестве локальных переменных.
Динамическая память, или куча
Помимо статической и стековой памяти, существует еще практически неограниченный ресурс памяти, которая называется динамическая, или куча ( heap ). Программа может захватывать участки динамической памяти нужного размера. После использования ранее захваченный участок динамической памяти следует освободить.
Под динамическую память отводится пространство виртуальной памяти процесса между статической памятью и стеком. (Механизм виртуальной памяти был рассмотрен в разделе 2.6.) Обычно стек располагается в старших адресах виртуальной памяти и растет в сторону уменьшения адресов (см. раздел 2.3). Программа и константные данные размещаются в младших адресах, выше располагаются статические переменные. Пространство выше статических переменных и ниже стека занимает динамическая память:
В традиционных языках программирования, таких как Си , Фортран, Паскаль , существуют три вида памяти: статическая, стековая и динамическая . Конечно, с физической точки зрения никаких различных видов памяти нет: оперативная память - это массив байтов, каждый байт имеет адрес , начиная с нуля. Когда говорится о видах памяти, имеются в виду способы организации работы с ней, включая выделение и освобождение памяти , а также методы доступа.
Статическая память
Статическая память выделяется еще до начала работы программы, на стадии компиляции и сборки. Статические переменные имеют фиксированный адрес, известный до запуска программы и не изменяющийся в процессе ее работы. Статические переменные создаются и инициализируются до входа в функцию main , с которой начинается выполнение программы.
Существует два типа статических переменных:
- глобальные переменные - это переменные, определенные вне функций, в описании которых отсутствует слово static . Обычно описания глобальных переменных, включающие слово extern , выносятся в заголовочные файлы (h-файлы). Слово extern означает, что переменная описывается, но не создается в данной точке программы. Определения глобальных переменных, т.е. описания без слова extern , помещаются в файлы реализации (c-файлы или cpp-файлы). Пример: глобальная переменная maxind описывается дважды:
- в h-файле с помощью строки
- Статическую переменную можно описать и внутри функции, хотя обычно так никто не делает. Переменная размещается не в стеке, а в статической памяти, т.е. ее нельзя использовать при рекурсии, а ее значение сохраняется между различными входами в функцию. Область видимости такой переменной ограничена телом функции, в которой она определена. В остальном она подобна статической или глобальной переменной. Заметим, что ключевое слово static в языке Си используется для двух различных целей:
- как указание типа памяти: переменная располагается в статической памяти, а не в стеке;
- как способ ограничить область видимости переменной рамками одного файла (в случае описания переменной вне функции).
Стековая, или локальная, память
Локальные, или стековые, переменные - это переменные, описанные внутри функции. Память для таких переменных выделяется в аппаратном стеке, см. раздел 2.3.2. Память выделяется в момент входа в функцию или блок и освобождается в момент выхода из функции или блока. При этом захват и освобождение памяти происходят практически мгновенно, т.к. компьютер только изменяет регистр, содержащий адрес вершины стека.
Локальные переменные можно использовать при рекурсии, поскольку при повторном входе в функцию в стеке создается новый набор локальных переменных, а предыдущий набор не разрушается. По этой же причине локальные переменные безопасны при использовании нитей в параллельном программировании (см. раздел 2.6.2). Программисты называют такое свойство функции реентерабельностью, от англ. re-enter able - возможность повторного входа. Это очень важное качество с точки зрения надежности и безопасности программы! Программа, работающая со статическими переменными, этим свойством не обладает, поэтому для защиты статических переменных приходится использовать механизмы синхронизации (см. 2.6.2), а логика программы резко усложняется. Всегда следует избегать использования глобальных и статических переменных, если можно обойтись локальными.
Недостатки локальных переменных являются продолжением их достоинств. Локальные переменные создаются при входе в функцию и исчезают после выхода из нее, поэтому их нельзя использовать в качестве данных, разделяемых между несколькими функциями. К тому же, размер аппаратного стека не бесконечен, стек может в один прекрасный момент переполниться (например, при глубокой рекурсии), что приведет к катастрофическому завершению программы. Поэтому локальные переменные не должны иметь большого размера. В частности, нельзя использовать большие массивы в качестве локальных переменных.
Динамическая память, или куча
Помимо статической и стековой памяти, существует еще практически неограниченный ресурс памяти, которая называется динамическая, или куча ( heap ). Программа может захватывать участки динамической памяти нужного размера. После использования ранее захваченный участок динамической памяти следует освободить.
Под динамическую память отводится пространство виртуальной памяти процесса между статической памятью и стеком. (Механизм виртуальной памяти был рассмотрен в разделе 2.6.) Обычно стек располагается в старших адресах виртуальной памяти и растет в сторону уменьшения адресов (см. раздел 2.3). Программа и константные данные размещаются в младших адресах, выше располагаются статические переменные. Пространство выше статических переменных и ниже стека занимает динамическая память:
Содержание
- 1. Динамическое и статическое (фиксированное) выделение памяти. Главные различия
- 2. Преимущества и недостатки использования динамического и статического способов выделения памяти
- 3. Как выделить память оператором new для одиночной переменной? Общая форма.
- 4. Как освободить память, выделенную под одиночную переменную оператором delete ? Общая форма
- 5. Примеры выделения ( new ) и освобождения ( delete ) памяти для указателей базовых типов
- 6. Что такое «утечка памяти» (memory leak)?
- 7. Каким образом выделить память оператором new с перехватом критической ситуации, при которой память может не выделиться? Исключительная ситуацияbad_alloc . Пример
- 8. Выделение памяти для переменной с одновременной инициализацией. Общая форма. Пример
Поиск на других ресурсах:
1. Динамическое и статическое (фиксированное) выделение памяти. Главные различия
Для работы с массивами информации, программы должны выделять память для этих массивов. Для выделения памяти под массивы переменных используются соответствующие операторы, функции и т.п.. В языке программирования C++ выделяют следующие способы выделения памяти:
1. Статическое (фиксированное) выделение памяти. В этом случае память выделяется только один раз во время компиляции. Размер выделенной памяти есть фиксированным и неизменным до конца выполнения программы. Примером такого выделения может служить объявление массива из 10 целых чисел:
2. Динамическое выделение памяти. В этом случае используется комбинация операторов new и delete . Оператор new выделяет память для переменной (массива) в специальной области памяти, которая называется «куча» (heap). Оператор delete освобождает выделенную память. Каждому оператору new должен соответствовать свой оператор delete .
2. Преимущества и недостатки использования динамического и статического способов выделения памяти
Динамическое выделение памяти по сравнению со статическим выделением памяти дает следующие преимущества:
- память выделяется по мере необходимости программным путем;
- нет лишних затрат неиспользованной памяти. Выделяется столько памяти сколько нужно и если нужно;
- можно выделять память для массивов информации, размер которых заведомо неизвестен. Определение размера массива формируется в процессе выполнения программы;
- удобно осуществлять перераспределение памяти. Или другими словами, удобно выделять новый фрагмент для одного и того же массива, если нужно выделить дополнительную память или освободить ненужную;
- при статическом способе выделения памяти трудно перераспределять память для переменной-массива, поскольку она уже выделена фиксировано. В случае динамического способа выделения, это делается просто и удобно.
Преимущества статического способа выделения памяти:
- статическое (фиксированное) выделение памяти лучше использовать, когда размер массива информации заведомо известен и есть неизменным на протяжении выполнения всей программы;
- статическое выделение памяти не требует дополнительных операций освобождения с помощью оператора delete . Отсюда вытекает уменьшение ошибок программирования. Каждому оператору new должен соответствовать свой оператор delete ;
- естественность (натуральность) представления программного кода, который оперирует статическими массивами.
В зависимости от поставленной задачи, программист должен уметь правильно определить, какой способ выделения памяти подходит для той или другой переменной (массива).
3. Как выделить память оператором new для одиночной переменной? Общая форма.
Общая форма выделения памяти для одиночной переменной оператором new имеет следующий вид:
- ptrName – имя переменной (указателя), которая будет указывать на выделенную память;
- type – тип переменной. Размер памяти выделяется достаточный для помещения в нее значения переменной данного типа type .
4. Как освободить память, выделенную под одиночную переменную оператором delete ? Общая форма
Если память для переменной выделена оператором new, то после завершения использования переменной, эту память нужно освободить оператором delete . В языке C++ это есть обязательным условием. Если не освободить память, то память останется выделенной (занятой), но использовать ее не сможет ни одна программа. В данном случае произойдет «утечка памяти» (memory leak).
Общая форма оператора delete для одиночной переменной:
где ptrName – имя указателя, для которого была раньше выделена память оператором new . После выполнения оператора delete указатель ptrName указывает на произвольный участок памяти, который не является зарезервированным (выделенным).
5. Примеры выделения ( new ) и освобождения ( delete ) памяти для указателей базовых типов
В примерах демонстрируется использование операторов new и delete . Примеры имеют упрощенный вид.
Пример 1. Указатель на тип int . Простейший пример
Пример 2. Указатель на тип double
⇑
6. Что такое «утечка памяти» ( memory leak )?
«Утечка памяти» – это когда память для переменной выделяется оператором new , а по окончании работы программы она не освобождается оператором delete . В этом случае память в системе остается занятой, хотя потребности в ее использовании уже нет, поскольку программа, которая ее использовала, уже давно завершила свою работу.
«Утечка памяти» есть типичной ошибкой программиста. Если «утечка памяти» повторяется многократно, то возможная ситуация, когда будет «занята» вся доступная память в компьютере. Это приведет к непредсказуемым последствиям работы операционной системы.
7. Каким образом выделить память оператором new с перехватом критической ситуации, при которой память может не выделиться? Исключительная ситуация bad_alloc . Пример
При использовании оператора new возможна ситуация, когда память не выделится. Память может не выделиться в следующих ситуациях:
- если отсутствует свободная память;
- размер свободной памяти меньше чем тот, который был задан в операторе new .
В этом случае генерируется исключительная ситуация bad_alloc . Программа может перехватить эту ситуацию и соответствующим образом обработать ее.
Пример. В примере учитывается ситуация, когда память может не выделиться оператором new . В таком случае осуществляется попытка выделить память. Если попытка удачная, то работа программы продолжается. Если попытка завершилась неудачей, то происходит выход из функции с кодом -1.
8. Выделение памяти для переменной с одновременной инициализацией. Общая форма. Пример
Оператор выделения памяти new для одиночной переменной допускает одновременную инициализацию значением этой переменной.
В общем, выделение памяти для переменной с одновременной инициализацией имеет вид
- ptrName – имя переменной-указателя, для которой выделяется память;
- type – тип на который указывает указатель ptrName ;
- value – значение, которое устанавливается для выделенного участка памяти (значение по указателю).
Пример. Выделение памяти для переменных с одновременной инициализацией. Ниже приводится функция main() для консольного приложения. Продемонстрировано выделение памяти с одновременной инициализацией. Также учитывается ситуация, когда попытка выделить память завершается неудачей (критическая ситуация bad_alloc ).
Память — одна из самых сложных тем в информатике, но понимание устройства памяти компьютера позволяет разрабатывать более эффективные программы, а для более низкоуровневого программирования, например, при разработке ОС, это понимание и вовсе является обязательным.
В этой статье будет рассмотрена модель памяти с высокоуровневой точки зрения — виды памяти, аллокаторы, сборщик мусора.
Динамическое и статическое выделение памяти. Преимущества и недостатки. Выделение памяти для одиночных переменных операторами new и delete . Возможные критические ситуации при выделении памяти. Инициализация при выделении памяти
Аллокатор
У динамической памяти есть две явные проблемы. Во-первых, любое выделение/освобождение памяти в ОС — системный вызов, замедляющий работу программы. Решением этой проблемы является аллокатор.
Аллокатор — это часть программы, которая запрашивает память большими кусками напрямую у ОС через системные вызовы (в POSIX-совместимых ОС это mmap для выделения памяти и unmap — для освобождения), затем по частям отдаёт эту память приложению (в Си это могут быть функции malloc() / free() ). Такой подход увеличивает производительность, но может вызвать фрагментацию памяти при длительной работе программы.
malloc() / free() и mmap / unmap — это не одно и то же. Первый является простейшим аллокатором в libc , второй является системным вызовом. В большинстве языков можно использовать только аллокатор по умолчанию, но в языках с более низкоуровневой моделью памяти можно использовать и другие аллокаторы.
Например, boost::pool аллокаторы, созданные для оптимальной работы с контейнерами ( boost::pool_allocator для линейных ( std::vector ), boost::fast_pool_allocator для нелинейных ( std::map, std::list )). Или аллокатор jemalloc, оптимизированный для решения проблем фрагментации и утилизации ресурсов CPU в многопоточных программах. Более подробно о jemalloc можно узнать из доклада с конференции C++ Russia 2018.
Читайте также: