
Что можно рассматривать в качестве диска при кинематическом анализе структуры стержневых систем
Определим несколько базовых понятий, связанных с кинематическим анализом конструкций.
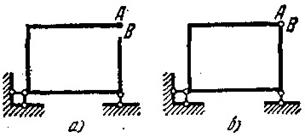
Введем понятие кинематической цепи. Кинематической цепью называется система дисков, соединенных между собой с помощью кинематических связей. Под диском подразумевается любое неизменяемое тело, а кинематической связью называется устройство, уничтожающее одну степень свободы, или, иначе говоря, препятствующее перемещению в одном каком-либо направлении. Степенью свободы кинематической цепи называется количество независимых геометрических параметров, определяющих положение ее элементов. Любой диск имеет в пространстве шесть, а на плоскости – три степени свободы. Например, положение твердого тела, показанного на рис.1.8,а, однозначно определяется тремя координатами точки А и тремя углами наклона прямой АВ к координатным осям. Положение плоской фигуры, показанной на рис.1.8,б, можно задать тремя параметрами: двумя координатами точки А и углом наклона прямой АВ к одной из координатных осей.
Как уже отмечалось выше, в качестве несущих конструкций могут использоваться только неизменяемые системы. Поэтому при проектировании конструкции необходимо в первую очередь выяснить, является она изменяемой или нет. Полезно также установить, является конструкция статически определимой или статически неопределимой. Напомним, что статически определимой является такая конструкция, которая может быть рассчитана с помощью одних лишь уравнений статики. Расчет статически неопределимых систем более сложен и требует применения, наряду с уравнениями равновесия, и других соотношений.
Установить неизменяемость системы можно с помощью характеристики, названной выше степенью свободы. Степень свободы показывает, по какому количеству направлений могут происходить перемещения при отсутствии деформаций. Следовательно, для кинематического анализа конструкции необходимо мысленно представить, что входящие в ее состав элементы и связи между ними являются абсолютно жесткими, и подсчитать степень свободы полученной системы. Если степень свободы конструкции с жесткими элементами равна нулю или меньше нуля, то перемещения без деформаций невозможны, и, следовательно, данная конструкция неизменяема.
Обозначим через Д число дисков системы, а через С – число кинематических связей. Тогда степень свободы плоской кинематической цепи может быть найдена по формуле
Степень свободы пространственной кинематической цепи может быть найдена так:
Условие неизменяемости для плоской системы имеет вид
а для пространственной
Если для плоской системы соблюдается соотношение
а для пространственной
то это означает, что конструкция является статически определимой, так как для плоской системы можно составить 3Д, а для пространственной – 6Д уравнений равновесия, из которых и можно найти усилия в С кинематических связях. Таким образом, соотношения (1.5) и (1.6) являются условиями статической определимости и геометрической неизменяемости одновременно.
Если конструкция не связана с основанием (землей), то следует говорить о внутренней ее неизменяемости. В этом случае от общего числа степеней свободы следует отнять число степеней свободы, связанных с движением конструкции как твердого тела (с движением, при котором не происходит изменения взаимного положения точек системы). Формулы для определения числа внутренних степеней свободы плоских и пространственных конструкций на основании (1.1), (1.2) и сказанного выше принимают вид
Плоская система, не связанная с землей, является статически определимой и геометрически неизменяемой, если соблюдается условие
Для пространственной системы это условие принимает вид
Покажем, что соотношения (1.5), (1.6), (1.9) и (13.10) являются необходимыми, но недостаточными условиями статической определимости и геометрической неизменяемости. Рассмотрим, например, конструкцию, состоящую из двух стержней, соединенных между собой при помощи шарнира в точке В и имеющую одну шарнирно-неподвижную и две шарнирно-подвижные опоры (рис.1.9). Отметим, что присоединение одного диска к другому при помощи шарнира устраняет две степени свободы присоединяемого диска, так как препятствует его поступательному перемещению.

Очевидно, что эта конструкция является изменяемой, так как консоль ВС может свободно поворачиваться вокруг точки В. Вычислим степень свободы конструкции по формуле (1.1). Конструкция содержит два диска и имеет шесть связей – четыре внешних и две внутренних. Получаем:
Таким образом, согласно формуле (1.1) конструкция, изображенная на рис.1.9, геометрически неизменяема, что противоречит очевидному факту ее изменяемости. Это противоречие объясняется тем, что конструкция имеет одну избыточную связь в части АВ при отсутствии одной необходимой для обеспечения неизменяемости связи в части ВС. Если переставить одну из шарнирно-подвижных опор, как показано на рис.1.10, то конструкция станет неизменяемой. Следовательно, наряду с исследованием неизменяемости по формулам (1.1) – (1.10) необходим кинематический анализ конструкций. В связи с этим приведем некоторые правила образования неизменяемых систем.
Предварительно рассмотрим способ соединения элементов, приводящий к так называемой мгновенной изменяемости. Пусть три диска соединены между собой с помощью шарниров, как показано на рис.1.11. Разъединим мысленно диски 1 и 2 в точке В. Диск 1 сможет поворачиваться вокруг точки А, и при этом точка В будет перемещаться по дуге окружности 1. Диск 2 сможет поворачиваться вокруг точки С, и при этом точка В будет перемещаться по дуге окружности 2. Но окружности 1 и 2 имеют общую касательную в точке В. Следовательно, в заданной системе диск 2 не препятствует бесконечно малому перемещению точки В в направлении касательной за счет вращения диска 1, а диск 1, в свою очередь, не препятствует бесконечно малому перемещению точки В направлении касательной за счет вращения диска 2.
Таким образом, в системе, изображенной на рис.1.11, возможны бесконечно малые перемещения без деформации дисков. Такие системы называются мгновенно изменяемыми. Аналогичная ситуация возникает при соединении двух дисков с помощью трех стержней, пересекающихся в одной точке (рис.1.12,а). Частным случаем такого соединения является соединений с помощью трех параллельных стержней (рис.1.12,б).
Использование мгновенно изменяемых систем в качестве несущих конструкций недопустимо, так как в них могут возникать очень большие усилия (теоретически бесконечно большие) при весьма незначительных нагрузках.
Рассмотрим теперь правила образования неизменяемых систем.
1. Присоединение шарнирного узла к неизменяемой системе (диску).
Для образования неизменяемой системы шарнирный узел должен быть присоединен к диску с помощью двух стержней, оси которых не совпадают. Такой способ присоединения к диску показан на рис.1.13,а. Если оси АВ и АС совпадут, образуется мгновенно изменяемая система (три шарнира на одной прямой). Если в качестве диска использовать стержень, получится шарнирный треугольник (рис.1.13,б). Следовательно, шарнирный треугольник неизменяем.
2. Соединение двух дисков.
Два диска образуют неизменяемую систему, если:
а) они соединены между собой тремя стержнями, осевые линии которых не параллельны друг другу и не пересекаются в одной точке;
б) они соединены между собой при помощи шарнира и стержня, осевая линия которого не проходит через этот шарнир.
Соединение двух дисков по способу а) показано на рис.1.14. Если бы стержни 1,2 и 3 пересекались в одной точке (как показано на рис.1.14,б), то возможно было бы вращение дисков вокруг мгновенного центра вращения “m”. В схеме рис.1.14,а при отсутствии стержня 3 было бы возможно вращение дисков относительно точки пересечения “m” стержней 1 и 2. Стержень 3 препятствует такому вращению, если его ось не проходит через точку “m”. Таким образом, схема рис.1.14,а является неизменяемой, а схема рис 3.14,б – мгновенно изменяемой.
Соединение по способу б) показано на рис.1.15. Такое соединение можно рассматривать как частный случай соединения по способу а). Доказательство неизменяемости аналогично предыдущему случаю.
3. Соединение трех дисков
Три диска образуют неизменяемую систему, если:
а) они соединены при помощи трех шарниров, не лежащих на одной прямой;
б) они соединены при помощи шести стержней таким образом, что между каждой парой дисков имеется по два стержня, точки пересечений осей которых не лежат на одной прямой.
Соединение по схеме а) показано на рис.1.16,а, а по схеме б) – на рис.1.16,б.
Если каждый из дисков, показанных на рис.1.16,а, заменить эквивалентным стержнем (пунктирные линии на этом рисунке), то получится шарнирный треугольник, неизменяемость которого была доказана выше. В схеме рис.1.16,б каждую пару стержней можно заменить фиктивным шарниром, лежащим на пересечении этих стержней. Следовательно, схема рис.1.16,б будет неизменяемой, если точки a,b,c не будут лежать на одной прямой. В противном случае система будет мгновенно изменяемой.
Изучение различных расчетных схем и механический моделей ведется в двух дисциплинах - сопротивлении материалов и строительной механике. Далее рассмотрим один из видов анализа – кинематический анализ, который применяют эти дисциплины
Кинематический анализ. Основная формула кинематического анализа
Внешняя нагрузка, воздействующая на сооружение, может вызвать большие перемещения отдельных элементов конструкции, в результате чего оно может быть разрушено, следовательно, перемещения сооружения должны быть очень малыми.
Кинематический анализ – это анализ геометрической структуры сооружения для того, чтобы не допустить возможности возникновения больших перемещений.
В строительной механике при выполнении кинематического анализа внешняя нагрузка не учитывается, а все элементы конструкции считаются жесткими.
В кинематическом анализе выделяют следующие типы расчетных схем:
1) Геометрически неизменяемая система – это система, элементы которой могут перемещаться только за счет своей деформации. Одним из вариантов такой системы является шарнирный треугольник (рис. 1, а).
2) Геометрически изменяемая система – это система, элементы которой могут перемещаться даже без деформаций. В качестве примера такой системы можно привести шарнирный четырехугольник (рис. 1, б).
3) Мгновенно изменяемая система – система, элементы которой могут получать только мгновенные перемещения (рис. 1, в).
Рисунок 1. Типы расчетных схем в кинематическом анализе
Кинематические свойства инженерной конструкции определяют путем расчета числа ее степеней свободы.
Число степеней свободы (W) – это минимальное количество координат, требуемое для определения места нахождения любого элемента конструкции.
Кинематические связи (внутренние и внешние) должны обеспечивать неподвижность конструкции относительно фундамента, а также неизменяемость ее внутренней геометрической структуры.
В случае, если при исключении одной связи из неизменяемой конструкция превращается в изменяемой, то эта связь называется необходимой.
В случае, если при удалении одной связи конструкция остается неизменяемой, то связь называется избыточной.
Число степеней свободы для плоской стержневой системы рассчитывается по формуле, называемой основной формулой кинематического анализа :
Диск (Д) – неизменяемая часть конструкции, представляющая собой жесткий неподвижный элемент;
Шарнир (Ш) – связь, позволяющая соединяемым ею дискам поворачиваться друг относительно друга;
Опорный стержень (С0) – число реакций, которые могут возникать во всех связях ( внутренних и внешних ) данной конструкции.
Шарнир, соединяющий два диска, называется простым шарниром (рис. 2, а).
Шарнир, соединяющий несколько дисков, называется сложным шарниром (рис. 2, б).
Сложный шарнир равен ( k –1 ) простому шарниру, где k – число дисков, соединяемых данным шарниром.
Рисунок 2. Сложный и простой шарниры
При расчете по основной формуле кинематического анализа возможны следующие результаты:
1) W>0 – такая система является геометрически изменяемой и такая конструкция не может служить в качестве инженерного сооружения;
2) W=0 – в схеме введено необходимое число связей и если они введены верно, то система неизменяема и статически определима;
3) W – в системе присутствуют избыточные связи если они введены верно , то система неизменяема и статически неопределима.
Стержневые системы
Для расчетов конструкций используются упрощенные схемы и модели, которые позволяют заменить реальный объект упрощенной схемой, из которой исключены не представляющие важность факторы. Расчеты стержневых систем ведутся исходя из их особенностей:
- ферма является самым простым примером стержневой системы, которая рассчитывается конструкторами. Она состоит из стержней, которые соединяются друг с другом с помощью связей, шарниров и жестких узлов. Ферма от других стержневых систем отличается тем, что сосредоточенную нагрузку можно приложить только узлам. Нагрузка, приложенная к стержню, вызовет изгиб, на который стержень не рассчитан;
- балки – это стержневые системы, которые воспринимают поперечные нагрузки в виде сосредоточенных сил и моментов, а также распределенных нагрузок. Такие стержневые системы имеют пролеты и консоли;
- рама — это пример стержневой системы, состоящей из балок, соединённых жесткими узлами, которые в основном испытывают изгиб;
- к неразрезным многопролетным балкам относятся стержневые системы, которые отличаются от разрезных блок тем, что над опорами врезаны шарниры, и балка рассчитывается как ряд однопролетных статически неопределимых балок;
- арка – это стержневая система, имеющая кривизну, которая работает в основном на сжатие.
Консоль – это часть балки, которая выступает свободно за опору.
Рисунок 1. Пример выполнения кинематического анализа плоской стержневой системы. Автор24 — интернет-биржа студенческих работ
Готовые работы на аналогичную тему
Если в системе возможно перемещение узлов, и при этом оно не вызывает деформаций, то такая система будет геометрически изменяемой, у такой системы число степеней свободы больше числа связей.
Если в системе перемещение узлов идет только через деформацию стержней, то такая система будет геометрически неизменяемой, ее число степеней свободы равно числу связей.
К мгновенно изменяемым системам относятся те, которые допускают бесконечно малые перемещения без деформации. Их отличие от геометрически изменяемых состоит в том, что при перемещении узлов на бесконечно малые расстояния возникают большие усилия, которые становятся причиной разрушения.
Ключевой характеристикой кинематического анализа системы является число степеней свободы. Он определяется как число независимых перемещений или координат, которые определяют положение системы в пространстве или плоскости. Таким образом свободная точка в плоскости имеет две степени свободы, в пространстве три. Стержень, расположенный в плоскости имеет 3 степени свободы, ему доступны три перемещения. Связи ограничивают перемещения. Простая связь лишает тело одной степени свободы, то есть одного перемещения. Таким образом закрепленный стержень имеет две степени свободы вместо трех. Если концы стержня закреплены двумя шарнирными опорами, то он лишен двух степеней свободы, но имеет возможность поворота, и степень его свободы равна 1.
Кинематический анализ позволяет выявить свойства стержневых систем, определить их возможности к перемещениям и определить дальнейшую методику расчета. Изучая дисциплину сопротивление материалов, студенты дальше осваивают правила построения расчетных схем и соответствующие этапы расчетов, которые позволяют понять какие напряжения испытывают элементы при воздействии нагрузок. Эта база в дальнейшем позволяет перейти к более сложным расчетам в строительной механике и приступить к непосредственно расчетам строительных конструкций из дерева, металла или железобетона. Таким образом, посредством перехода от общего к частному, от понимания действия и устройства простых систем ведется обучение инженеров-строителей.
От освоения этого начального этапа зависит умение строить расчетные схемы, поэтому материал осваивается вначале курса, продолжая основы, заложенные в теоретической механике.
Кинематический анализ. Основная формула кинематического анализа
Внешняя нагрузка, воздействующая на сооружение, может вызвать большие перемещения отдельных элементов конструкции, в результате чего оно может быть разрушено, следовательно, перемещения сооружения должны быть очень малыми.
Кинематический анализ – это анализ геометрической структуры сооружения для того, чтобы не допустить возможности возникновения больших перемещений.
В строительной механике при выполнении кинематического анализа внешняя нагрузка не учитывается, а все элементы конструкции считаются жесткими.
В кинематическом анализе выделяют следующие типы расчетных схем:
1) Геометрически неизменяемая система – это система, элементы которой могут перемещаться только за счет своей деформации. Одним из вариантов такой системы является шарнирный треугольник (рис. 1, а).
2) Геометрически изменяемая система – это система, элементы которой могут перемещаться даже без деформаций. В качестве примера такой системы можно привести шарнирный четырехугольник (рис. 1, б).
3) Мгновенно изменяемая система – система, элементы которой могут получать только мгновенные перемещения (рис. 1, в).
Рисунок 1. Типы расчетных схем в кинематическом анализе
Кинематические свойства инженерной конструкции определяют путем расчета числа ее степеней свободы.
Число степеней свободы (W) – это минимальное количество координат, требуемое для определения места нахождения любого элемента конструкции.
Кинематические связи (внутренние и внешние) должны обеспечивать неподвижность конструкции относительно фундамента, а также неизменяемость ее внутренней геометрической структуры.
В случае, если при исключении одной связи из неизменяемой конструкция превращается в изменяемой, то эта связь называется необходимой.
В случае, если при удалении одной связи конструкция остается неизменяемой, то связь называется избыточной.
Число степеней свободы для плоской стержневой системы рассчитывается по формуле, называемой основной формулой кинематического анализа :
Диск (Д) – неизменяемая часть конструкции, представляющая собой жесткий неподвижный элемент;
Шарнир (Ш) – связь, позволяющая соединяемым ею дискам поворачиваться друг относительно друга;
Опорный стержень (С0) – число реакций, которые могут возникать во всех связях ( внутренних и внешних ) данной конструкции.
Шарнир, соединяющий два диска, называется простым шарниром (рис. 2, а).
Шарнир, соединяющий несколько дисков, называется сложным шарниром (рис. 2, б).
Сложный шарнир равен ( k –1 ) простому шарниру, где k – число дисков, соединяемых данным шарниром.
Рисунок 2. Сложный и простой шарниры
При расчете по основной формуле кинематического анализа возможны следующие результаты:
1) W>0 – такая система является геометрически изменяемой и такая конструкция не может служить в качестве инженерного сооружения;
2) W=0 – в схеме введено необходимое число связей и если они введены верно, то система неизменяема и статически определима;
3) W – в системе присутствуют избыточные связи если они введены верно , то система неизменяема и статически неопределима.
Ранее в лекциях мы частично рассматривали вопросы, связанные с понятием статической неопределимости. Для решения большинства встречающихся на практике задач описанные приемы оказываются однако, далеко не достаточными. Поэтому необходимо остановиться на более общих методах раскрытия статической неопределимости стержневых систем.
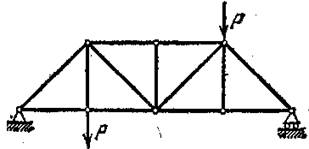
Под стержневой системой в широком смысле слова понимается всякая конструкция, состоящая из элементов, имеющих форму стержня. Если элементы конструкции работают в основном на растяжение или сжатие, то стержневая система называется фермой (рис. 1). Ферма состоит из прямых стержней, образующих треугольники. Для фермы характерно приложение внешних сил в узлах.
Если элементы стержневой системы работают в основном на изгиб или кручение, то система называется рамой (рис. 2).
Особую, наиболее простую для исследования группу стержневых систем составляют плоские системы. У плоской рамы или фермы оси всех составляющих элементов расположены в одной плоскости, которая одновременно является главной плоскостью сечений. В этой же плоскости действуют все внешние силы, включая и реакции опор (см. рис. 2, а).
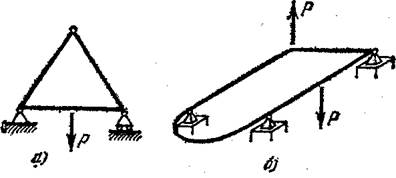
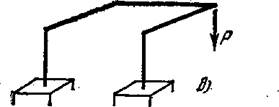
Нарядус плоскими рассматриваются так называемые плоскопространственные системы. Для такого рода систем оси составляющих элементов в недеформированном состоянии располагаются, как и для плоских систем, в одной плоскости. Внешние же силовые факторы действуют в плоскостях, перпендикулярных этой плоскости (рис. 2, б). Стержневые системы, не относящиеся к двум указанным классам, называются пространственными (рис. 2, в).
Рамы и фермы принято разделять на статически определимые и статически неопределимые. Под статически определимой понимается такая система, для которой все реакции опор могут быть определены при помощи уравнений равновесия, а затем при найденных опорных реакциях методом сечений могут быть найдены также и внутренние силовые факторы в любом поперечном сечении. Под статически неопределимой системой имеется в виду такая, для которой определение внешних реакций и всех внутренних силовых факторов не может быть произведено при помощи метода сечений и уравнений равновесия.
Разность между числом неизвестных (реакций опор и внутренних силовых факторов) и числом независимых уравнений статики, которые могут быть составлены для рассматриваемой системы, носит название степени или числа статической неопределимости. В зависимости от этого числа системы разделяются на один, два, три, . раз статически неопределимые. Иногда говорят, что степень статической неопределимости равна числу дополнительных связей, наложенных на систему. Остановимся на этом вопросе подробнее.
Положение жесткого тела в пространстве определяется шестью независимыми координатами, иначе говоря, жесткий стержень обладает шестью степенями свободы. На него могут быть наложены связи, т. е. ограничения, обусловливающие его определенное положение в пространстве. Наиболее простыми связями являются такие, при которых полностью исключается то или иное обобщенное перемещение для некоторых сечений. Наложение одной связи снимает одну степень свободы. Следовательно, если на свободный жесткий стержень наложено шесть связей, то положение его в пространстве будет, за некоторыми исключениями, определено полностью, и система из механизма, обладающего шестью степенями свободы, превращается в кинематически неизменяемую систему. То число связей, при котором достигается кинематическая неизменяемость, носит название необходимого числа связей. Всякую связь, наложенную сверх необходимых, называют дополнительной. Число дополнительных связей равно степени статической неопределимости системы.
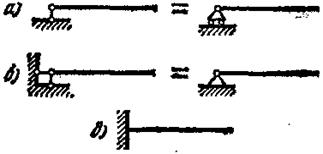
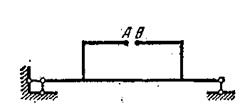
Связи в рамах и стержневых системах делят обычно на связи внешние и связи внутренние, или взаимные. Под внешними связями понимаются условия, накладываемые на абсолютные перемещения некоторых точек системы. Если, например, на левый конец бруса (рис. 3, а) наложено условие, запрещающее вертикальное перемещение, говорят, что в этой точке имеется одна внешняя связь. Условно она изображается в виде двух шарниров или катка. Если запрещено как вертикальное, так и горизонтальное смещение, говорят, что наложены две внешние связи (рис. 3, б). Заделка в плоской системе дает три внешние связи. Пространственная заделка соответствует шести внешним связям (рис. 3, в). Внешние связи делят на необходимые и дополнительные. Например, на рис. 4, а и б показана плоская рама, имеющая в первом случае три внешние связи, а во втором — пять внешних связей. Для того чтобы определить положение рамы в плоскости как жесткого целого, необходимо наложение трех связей. Следовательно, в первом случае рама имеет необходимые внешние связи, а во втором, кроме того, две дополнительные внешние связи.

Под внутренними, или взаимными, связями понимаются ограничения, накладываемые на взаимные смещения элементов рамы. Здесь также можно говорить как о необходимых, так и о дополнительных связях. Так, например, плоская рама, показанная на рис. 5, а, имеет необходимое количество как внешних, так и внутренних связей между элементами. Это — кинематически неизменяемая система. Если будут заданы внешние силы, мы сможем при помощи уравнений статики найти как реакции опор, так и внутренние силовые факторы в любом поперечном сечении рамы. В той же раме, показанной на рис. 5, б, кроме внешних наложены две дополнительные внутренние связи, запрещающие взаимное вертикальное и горизонтальное смещения точек А и В. Система в данном случае дважды статически неопределима (иногда, добавляют: внутренним образом).
В раме рис.4 а и б также имеются внутренние дополнительные связи. Контур рамы полностью замкнут. Разрезая его в любом сечении (рис. 6), мы, не нарушая кинематической неизменяемости, получаем возможность при заданных силах найти внутренние силовые факторы в каждом сечении рамы. Следовательно, разрезая замкнутую раму, мы снимаем дополнительные связи, т. е. позволяем сечениям А и В поворачиваться и смещаться в двух направлениях друг относительно друга. Обобщая, можно сказать, что замкнутый плоский контур имеет три дополнительные взаимные связи — трижды статически неопределим.
Таким образом, рама, показанная на рис. 4, а, трижды статически неопределима. Рама, показанная на рис. 4, б, пять раз статически неопределима (три раза внутренним образом и два раза — внешним).
Рассмотрим теперь несколько примеров определения степени статической неопределимости стержневых и рамных систем. На рис. 7, а—и показано несколько рам. Последовательно рассмотрим их.
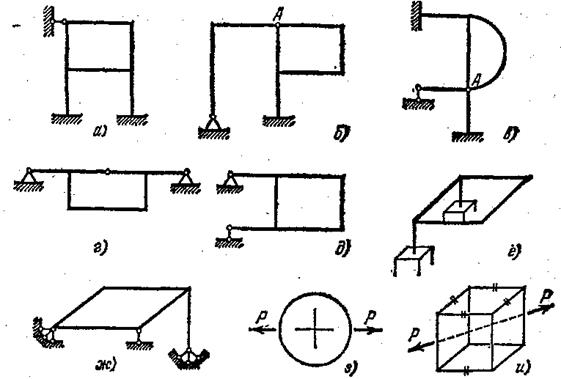
а.) Рама имеет четыре дополнительные внешние связи и три внутренние связи, т. е. семь раз статически неопределима.
б.) Полагаем сначала, что шарнир А отсутствует. Тогда имеются две внешние и три внутренние дополнительные связи. Система без шарнира А была бы пять раз статически неопределимой. Шарнир А принадлежит одновременно трем стержням. Его можно рассматривать как два совпавших шарнира (рис. 8). Так как каждый шарнир снимает одну связь, т. е. разрешает поворот одного сечения относительно другого, то можно сказать, что шарнир А снимает две связи. Система становится, таким образом, вместо пяти — три раза статически неопределимой.
Обобщая сказанное, можно сделать вывод, что шарнир снимает число связей, на единицу меньшее числа сходящихся в нем стержней. В данном случае в шарнире А сходятся три стержня, и шарнир снимает две связи.
в.) Если бы шарнир А отсутствовал, система была бы статически неопределимой четыре раза внешним образом и три раза внутренним образом, т. е. всего семь раз. Шарнир А снимает число связей, на единицу меньшее числа сходящихся в нем стержней, т. е. три связи. Рама четыре раза статически неопределима.
г.) Рама три раза статически неопределима.
д.) Внешние связи не удовлетворяют условиям кинематической неизменяемости. Это — механизм, точнее говоря, мгновенный механизм. Система имеет возможность поворачиваться относительно верхней опоры как жесткое целое. Понятно, что угол поворота будет небольшим. Нижняя связь заклинится и будет достигнуто какое-то положение равновесия. Но новое положение связей будет зависеть от жесткости системы. К раме неприменимы основные принципы сопротивления материалов: принцип неизменности начальных размеров и принцип независимости действия сил.
е.) Рама — пространственная. Имеется шесть дополнительных внешних связей (лишняя заделка) и шесть дополнительных взаимных связей (замкнутый контур). Система 12 раз статически неопределима.
ж.) Система семь раз статически неопределима (один раз, внешним образом и шесть раз — внутренним).
з.) Здесь для плоской рамы не показаны внешние связи, но дана система внешних сил, удовлетворяющая условиям равновесия. В таком случае условились считать, что дополнительных внешних связей нет и положение рамы в пространстве определено; рассматриваются только внутренние связи. Система три раза статически неопределима.
и.) Здесь также рассматриваются только внутренние связи, поскольку система внешних сил удовлетворяет условиям равновесия. Нужно подсчитать, сколько сечений необходимо сделать в раме, чтобы, с одной стороны, она не «рассыпалась», а с другой — чтобы в ней не осталось ни одного замкнутого контура. Таких сечений следует сделать пять (см. рисунок). Система 30 раз статически неопределима.
Кинематический анализ стержневых систем
Основой анализа является свойство стержневых систем изменять свою форму и не деформироваться, это свойство называется кинематической изменяемостью. Для упрощения в расчетных схемах все элементы представляются абсолютно жесткими, и каждую такую часть называют диском.
Можно разбить все системы по кинематическому признаку на:
- мгновенно изменяемые системы;
- геометрически изменяемые; системы
- геометрически неизменяемые системы.
Читайте также: