Uno id что за файл
В версии Arduino_ID_v1.0.4 ArduinoISP отсутствует.
Нужно загрузить библиотеку ArduinoISP.
Файл -->> примеры -->> ArduinoISP
Инструменты -->> Плата -->> Arduino UNO
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "AVRISP mkll"
Версия ArduinoISP version 04m3, 23 July 2011 Randall Bohn
Ошибка при загрузке программы: avrdude: stk500_getsync(): not in sync: resp=0x00
Отключил всё от выходов и входов Arduino UNO, ошибка пропала, программа загрузилась хорошо.
Файл -->> образцы -->> ArduinoISP
Инструменты -->> Плата -->> "Arduino/Genuino UNO"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "AVRISP mkll"
Версия ArduinoISP version 04m3, 23 July 2011 Randall Bohn
Загрузка прошла без ошибок.
Файл -->> примеры -->> ArduinoISP
Инструменты -->> Плата -->> "Arduino/Genuino UNO"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "AVRISP mkll"
Загрузка прошла без ошибок.
Файл -->> примеры -->> ArduinoISP
Инструменты -->> Плата -->> "Arduino/Genuino UNO"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "AVRISP mkll"
Файл -->> примеры -->> ArduinoISP
Инструменты -->> Плата -->> "Arduino/Genuino UNO"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "AVRISP mkll"
Загрузка прошла без ошибок.
Видео

Как мы с вами знаем из урока “Что умеет микроконтроллер“, у многих микроконтроллеров есть интерфейс UART, позволяющий передавать и принимать различные данные. У интерфейса есть два вывода на плате – пины TX и RX. На большинстве Arduino-плат к этим пинам подключен USB-UART преобразователь (расположен на плате), при помощи которого плата может определяться компьютером при подключении USB кабеля и обмениваться с ним информацией. На компьютере создаётся виртуальный COM порт (последовательный порт), к которому можно подключиться при помощи программ-терминалов и принимать-отправлять текстовые данные. Таким же образом кстати работают некоторые принтеры и большинство станков с ЧПУ.
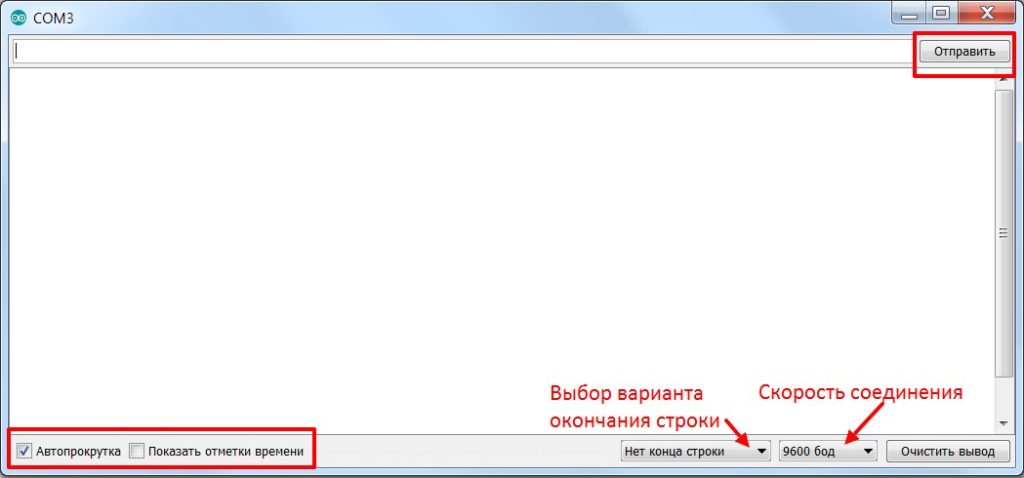
В самой Arduino IDE есть встроенная “консоль” – монитор порта, кнопка с иконкой лупы в правом верхнем углу программы. Нажав на эту кнопку мы откроем сам монитор порта, в котором будут настройки:
Если с отправкой, автопрокруткой, отметками времени и кнопкой очистить вывод всё и так понятно, то конец строки и скорость мы рассмотрим подробнее:
- Конец строки: тут есть несколько вариантов на выбор, чуть позже вы поймёте, на что они влияют. Лучше поставить нет конца строки, так как это позволит избежать непонятных ошибок на первых этапах знакомства с платформой.
- Нет конца строки – никаких дополнительных символов в конце введённых символов после нажатия на кнопку отправка или клавишу Enter.
- NL – символ переноса строки в конце отправленных данных.
- CR – символ возврата каретки в конце отправленных данных.
- NL+CR – и то и то.
Объект Serial
Начнём знакомство с одним из самых полезных инструментов Arduino-разработчика – Serial, который идёт в комплекте со стандартными библиотеками. Serial позволяет как просто принимать и отправлять данные через последовательный порт, так и наследует из класса Stream кучу интересных возможностей и фишек, давайте сразу их все рассмотрим, а потом перейдём к конкретным примерам.
Запустить связь по Serial на скорости speed (измеряется в baud, бит в секунду). Скорость можно поставить любую, но есть несколько “стандартных” значений. Список скоростей для монитора порта Arduino IDE:
- 300
- 1200
- 2400
- 4800
- 9600 чаще всего используется, можно назвать стандартной
- 19200
- 38400
- 57600
- 115200 тоже часто встречается
- 230400
- 250000
- 500000
- 1000000
- 2000000 – максимальная скорость, не работает на некоторых китайских платах
Возвращает количество байт, которые можно записать в буфер последовательного порта, не блокируя при этом функцию записи.
Отправляет в порт val численное значение или строку, или отправляет количество len байт из буфера buf. Важно! Отправляет данные как байт (см. таблицу ASCII), то есть отправив 88 вы получите букву X: Serial.write(88); .
Отправляет в порт значение val – число или строку, фактически “печатает”. В отличие от write выводит именно текст, т.е. отправив 88, вы получите 88: Serial.print(88); . Отправляет любые стандартные типы данных: численные, символьные, строковые. Также методы print()/println() имеют несколько настроек для разных данных, что делает их очень удобным инструментом отладки:
format позволяет настраивать вывод данных: BIN, OCT, DEC, HEX выведут число в соответствующей системе счисления: двоичная, восьмеричная, десятичная (по умолчанию) и 16-ричная. Цифра после вывода float позволяет настраивать выводимое количество знаков после точки:
Полный аналог print() , но автоматически переводит строку после вывода. Позволяет также вызываться без аргументов (с пустыми скобками) просто для перевода курсора на новую строку.
Возвращает текущий байт с края буфера, не убирая его из буфера. При вызове Serial.read() будет считан тот же байт, но из буфера уже уберётся.
Устанавливает time (миллисекунды) таймаут ожидания приёма данных для следующих ниже функций. По умолчанию равен 1000 мс (1 секунда).
Читает данные из буфера и ищет набор символов target (тип char ), опционально можно указать длину length. Возвращает true , если находит указанные символы. Ожидает передачу по таймауту.
Читает данные из буфера и ищет набор символов target (тип char ) либо терминальную строку terminal. Ожидает окончания передачи по таймауту, либо завершает приём после чтения terminal.
Читает данные из порта и закидывает их в буфер buffer (массив char[] или byte[] ). Также указывается количество байт, который нужно записать – length (чтобы не переполнить буфер).
Читает данные из порта и закидывает их в буфер buffer (массив char[] или byte[] ), также указывается количество байт, который нужно записать – length (чтобы не переполнить буфер) и терминальный символ character. Окончание приёма в buffer происходит при достижении заданного количества length, при приёме терминального символа character (он в буфер не идёт) или по таймауту
Читает порт, формирует из данных строку String , и возвращает её (урок про стринги). Заканчивает работу по таймауту.
Читает порт, формирует из данных строку String , и возвращает её (урок про стринги). Заканчивает работу по таймауту или после приёма символа terminator (символ char ).
Читает целочисленное значение из порта и возвращает его (тип long ). Заканчивает работу по таймауту. Прерывает чтение на всех знаках, кроме знака – (минус). Можно также отдельно указать символ skipChar, который нужно пропустить, например кавычку-разделитель тысяч (10’325’685), чтобы принять такое число.
Общие проблемы с открытием файлов UNO
Binary Data не установлен
Совет: Если вам извстна другая программа, которая может открыть файл UNO, вы можете попробовать открыть данный файл, выбрав это приложение из списка возможных программ.
Установлена неправильная версия Binary Data
В некоторых случаях может быть более новая (или более старая) версия файла Binary Data, которая не поддерживается установленной версией приложения. Если у вас нет правильной версии Binary Data (или любой из других программ, перечисленных выше), вам может потребоваться попробовать загрузить другую версию или одно из других программных приложений, перечисленных выше. Эта проблема чаще всего встречается, когда у вас есть более старая версия программного приложения, и ваш файл был создан более новой версией, которую он не может распознать.
Совет: Иногда вы можете получить подсказку о версии UNO-файла, который у вас есть, щелкнув правой кнопкой мыши на файле, а затем нажав на «Свойства» (Windows) или «Получить информацию» (Mac OSX).
Резюме: В любом случае, большинство проблем, возникающих во время открытия файлов UNO, связаны с отсутствием на вашем компьютере установленного правильного прикладного программного средства.
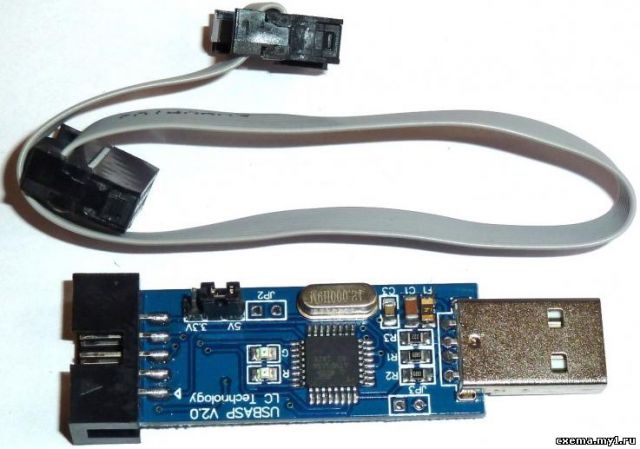
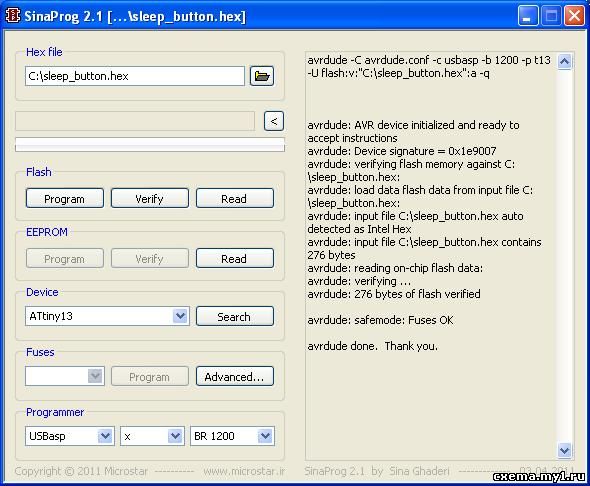
Прошиваем ATtiny13 с помощью программы AVRDude Prog v3.3
Программатор USBASP.
Перемычка JP3: Обязательно поставить.
Скриншот настроек программы.
Фьюзы ни какие не трогаем, всё по умолчанию
Прекрасно зашиваются файлы *.hexРасширение файла UNO имеет ноль тип (-ов) файла (-ов) и связано с ноль различными программными обеспечениями, но главным образом с Binary Data, разработанным Unknown Developer. Часто они представлены в формате Binary Data.
Рейтинг популярности данных файлов составляет «Носители информации», что означает, что они иногда используются простыми пользователями.
Однако следует учитывать, что существует намного больше информации, которую следует знать о файлах UNO; далее представлены лишь савые важные детали в отношении этих типов файлов. Если у вас возникли проблемы с открытием этих файлов, или вы хотите получить более подробную информацию, ознакомьтесь с подробной информацией, представленной ниже.
Популярность типов файлов
Ранг Файла
Статус файла
Откройте файлы в %%os%% с помощью средства для просмотра файлов FileViewPro
![]()
Другие причины проблем с открытием файлов UNO
Хотя на вашем компьютере уже может быть установлено Binary Data или другое программное обеспечение, связанное с UNO, вы по-прежнему можете столкнуться с проблемами при открытии файлов Binary Data. Если у вас по-прежнему возникают проблемы с открытием UNO-файлов, могут возникнуть другие проблемы, препятствующие открытию этих файлов. Эти другие проблемы включают (перечислены в порядке от наиболее до наименее распространенных):
![]()
Итак, разобрались со средой разработки, теперь можно загрузить прошивку. Рекомендую загрузить пустую прошивку, чтобы убедиться, что все драйвера установились и плата вообще прошивается. Также лучше делать это с новой или заведомо рабочей платой.
1. Плата подключается к компьютеру по USB, на ней должны замигать светодиоды. Если этого не произошло:
- Неисправен USB кабель.
- Неисправен USB порт компьютера.
- Неисправен USB порт Arduino.
- Попробуйте другой компьютер, чтобы исключить часть проблем из списка.
- Попробуйте другую плату, чтобы исключить часть проблем из списка.
- На плате Arduino сгорел диод по питанию USB.
- Плата Arduino сгорела полностью из-за неправильного подключения питания или короткого замыкания
2. Компьютер издаст характерный сигнал подключения нового оборудования, а при первом подключении появится окошко “Установка нового оборудования”. Если этого не произошло:
- См. предыдущий список неисправностей.
- Кабель должен быть data-кабелем, а не “зарядным”.
- Кабель желательно втыкать напрямую в компьютер, а не через USB-хаб.
- Не установлены драйверы для Arduino.
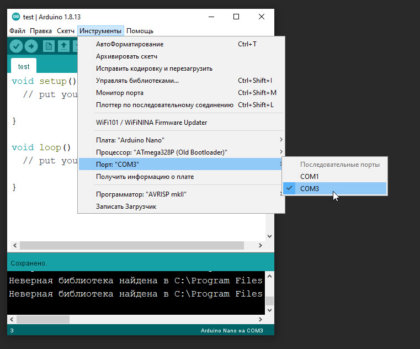
3. В списке портов (Arduino IDE/Инструменты/Порт) появится новый порт, отличный от COM1. Если этого не произошло:
- См. предыдущий список неисправностей.
- Некорректно установлен драйвер CH341.
- Если список портов вообще неактивен – драйвер Arduino установлен некорректно, вернитесь к установке
- Возникла системная ошибка, обратитесь к знакомому компьютерщику
![]()
![]()
![]()
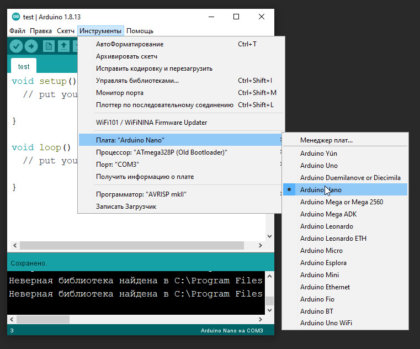
4. Выбираем свою плату. Если это Arduino Nano, выбираем в Инструменты\Плата\Arduino Nano. Если другая – выбираем другую. Нажимаем стрелочку в левом верхнем углу (загрузить прошивку). Да, загружаем пустую прошивку.
- [Для Arduino Nano] В микроконтроллер китайских нанок зашит “старый” загрузчик, поэтому выбираем Инструменты\Процессор\ATmega328p (Old Bootloader). Некоторые китайцы зашивают в свои платы новый загрузчик, поэтому если прошивка не загрузилась (загрузка идёт минуту и вылетает ошибка avrdude: stk500_getsync()) – попробуйте сменить пункт Процессор на ATmega328p.
Если появилась надпись “Загрузка завершена” – значит всё в порядке и можно прошивать другие скетчи. В любом случае на вашем пути встретятся другие два варианта событий, происходящих после нажатия на кнопку “Загрузка” – это ошибка компиляции и ошибка загрузки. Вот их давайте рассмотрим более подробно.
CAN шина
Описывать технические подробности CAN шины в деталях — удел документации. В данной статье достаточно знать, что она:
- имеет двухпроводное физическое подключение
- бывают различные скорости передачи данных
- для подключения уже имеются готовые микросхемы и даже готовые платы с распаянными деталями
Подключаюсь в диагностический разъём OBD (контакты 6 и 14) и смотрю осциллографом, что там имеется. После поворота ключа зажигания начинают бегать пакеты с амплитудой до 2,5 В. Ставлю паузу на осциллографе и смотрю на пакет.
![]()
Заметны стартовые и стоповые биты, какие-то данные в пакете. На тот момент я уже знал, что скорость передачи данных ожидается 500 кбит/с, как наиболее частая для моторной CAN шины. Длительность пакета получается около 230 мкс и перед пакетом наблюдается довольно большая пауза в передаче данных. Масштабирую время и вижу три пакета и паузы между ними.
![]()
Если сложить длительность передачи данных и паузу между пакетам получается, что передача одной порции данных занимает около 1 мс.
К чему я это всё вывожу? А вопрос чисто практический: хватит ли скорости последовательного порта для передачи всех данных? И исходя из увиденного, можно сделать вывод, что скорость 500 кбит/с развивается внутри пакета, который занимает примерно четверть времени на передачу. Значит средняя скорость передачи будет вчетверо меньшей. На тот момент я ещё не располагал тестами скорости последовательного интерфейса Arduino и забегая вперёд скажу, что даже с самым распространённым преобразователем Serial to USB CH340 стабильно работает скорость в 2 Мбит/с.
Прошиваем ATtiny13 с помощью программатора USBASP
![]()
Подключаем ATtiny13 к программатору вот по такой схеме.![]()
Настройки для прошивки ATtiny13 программатором USBASP в программе Arduino ID v1.8.9Инструменты -->> Плата: ATtiny13
Инструменты -->> Порт: "COM3"
Инструменты -->> Программатор: "USBasp"Все версии программы Arduino ID успешно прошивают ATtiny13, при установке нужных библиотек в программу Arduino ID,
в нашем случае для ATtiny13.
Однако нужно помнить, что должны быть установлены свежие драйверы для программатора USBASP
А если программатор новый(только пришёл с али), то нужно его ещё прошить новой прошивкой для корректной работы.
Прошивка находится в архиве, имя usbasp.atmega8.2011-05-28.hex
Если хотите знать как обновить прошивку USBasp, пишите в комментариях, добавлю по мере возможности.Не забываем ещё про перемычку в программаторе USBasp.
Перемычка JP1: питание программируемой микросхемы.
Перемычка JP3: Обязательно поставить, с этой перемычкой работают частоты - 9.6/4.3/1.2/скриншот настроек в программе Arduino ID.
![]()
Без всего этого удачных прошивок может и не быть.Программатор USBASP.
Перемычка JP3: Обязательно поставить.
Скриншот настроек программы.
Фьюзы ни какие не трогаем, всё по умолчанию
Прекрасно зашиваются файлы *.hex![]()
Видео
![]()
Непосредственно сама CAN шина используется уже много где, мне интересно её использование в автомобиле, хотя этой сферой можно и не ограничиваться. Тем более пару лет назад подвернулась такая возможность. Я посмотрел на общие спецификации — вроде бы ничего особо сложного нет. Посмотрел на программы, которые встречаются в интернете — и ни одна мне не приглянулась, у каждой не хватало чего-то такого, что казалось мне нужным на тот момент. Буду изобретать свой велосипед. Делаю свой CAN sniffer далее под катом.
Ошибки загрузки
Возникают на этапе, когда программа успешно скомпилирована и производится загрузка в плату по кабелю. Ошибка может возникать как по причине неисправностей железа, так и из-за настроек программы и драйверов.
- USB кабель, которым подключается Arduino, должен быть Data-кабелем, а не кабелем только для зарядки. Нужным нам кабелем подключаются к компьютеру плееры и смартфоны.
- Причиной ошибки загрузки являются не установленные/криво установленные драйвера CH340, если у вас китайская NANO.
- Также будет ошибка avrdude: ser_open(): can’t open device, если не выбран COM порт, к которому подключена Arduino. Если кроме COM1 других портов нет – читай два пункта выше, либо попробуй другой USB порт, или вообще другой компьютер.
- Большинство проблем при загрузке, вызванных “зависанием” ардуины или загрузчика, лечатся полным отключением ардуины от питания. Потом вставляем USB и по новой прошиваем.
- Причиной ошибки загрузки может быть неправильно выбранная плата в “Инструменты/Плата”, а также неправильно выбранный процессор в “Инструменты/Процессор”. Также в свежих версиях IDE нужно выбирать ATmega328P (Old Bootloader) для китайских плат NANO.
- Если у вас открыт монитор COM порта в другом окне Arduino IDE или плата общается через СОМ порт с другой программой (Ambibox, HWmonitor, SerialPortPlotter и т.д.), то вы получите ошибку загрузки, потому что порт занят. Отключитесь от порта или закройте другие окна и программы.
- Если у вас задействованы пины RX или TX – отключите от них всё! По этим пинам Arduino общается с компьютером, в том числе для загрузки прошивки.
- Если в описании ошибки встречается bootloader is not responding и not in sync, а все предыдущие пункты этого списка проверены – с вероятностью 95% сдох загрузчик. Второй неприятный исход – загрузчик “слетел”, и его можно прошить заново.
Типы файлов UNO
Управляющие символы
Существуют так называемые управляющие символы, позволяющие форматировать вывод. Их около десятка, но вот самые полезные из них
- \n – новая строка
- \r – возврат каретки
- \v – вертикальная табуляция
- \t – горизонтальная табуляция
Также если в тексте вы захотите использовать одинарные кавычки ' , двойные кавычки " , обратный слэш \ и некоторые другие символы – их нужно экранировать при помощи обратного слэша, он просто ставится перед символом:
- \" – двойные кавычки
- \' – апостроф
- \\ – обратный слэш
- \0 – нулевой символ
- \? – знак вопроса
Выведем строку с кавычками:
Комбинация \r\n переведёт строку и вернёт курсор в левое положение:
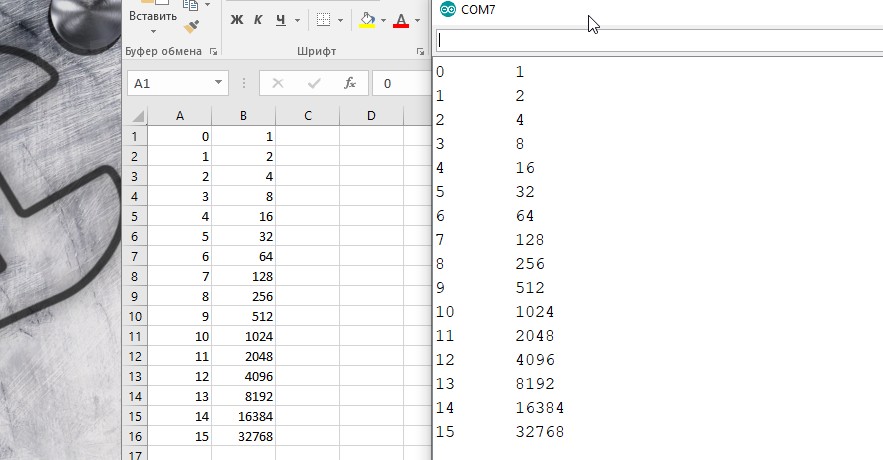
Символы табуляции позволят удобно отправлять данные для последующей вставки в таблицу. Например выведем несколько степеней двойки в виде таблицы, используя символ табуляции \t :
![]()
Результат скопируем и вставим в excel Удобно!
Отправка в порт
![blank]()
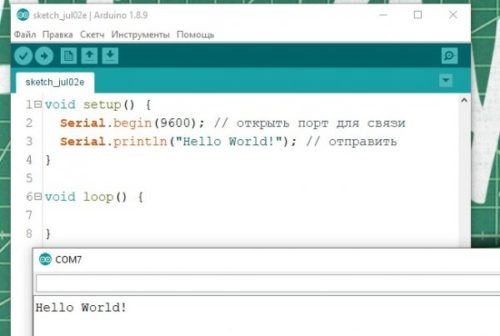
Рассмотрим самый классический пример для всех языков программирования: Hello World!
Отправка в порт позволяет узнать значение переменной в нужном месте программы, этот процесс называется отладка. Когда код работает не так, как нужно, начинаем смотреть, где какие переменные какие значения принимают. Или выводим текст из разных мест программы, чтобы наблюдать за порядком её работы. Во взрослых средах разработки и более серьёзных микроконтроллерах есть аппаратная отладка, которая позволяет наблюдать за ходом выполнения программы и значениями любых переменных без вывода в порт.Давайте вспомним урок циклы и массивы и выведем в порт элементы массива:
Вывод: 0 50 68 85 15 214 63 254 – элементы массива, разделённые пробелами.
Плоттер
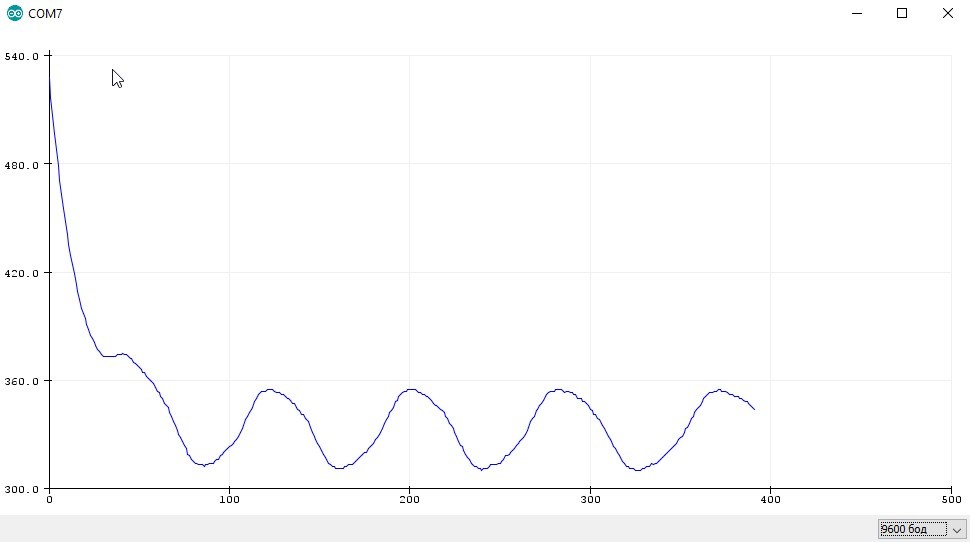
Помимо монитора последовательного порта, в Arduino IDE есть плоттер – построитель графиков в реальном времени по данным из последовательного порта. Достаточно отправлять значение при помощи команды Serial.println(значение) и открыть плоттер по последовательному соединению, например построим график значения с аналогового пина A0:
![]()
Плоттер поддерживает несколько линий графиков одновременно, для их отображения нужно соблюдать следующий протокол отправки данных: значения выводятся в одну строку, одно за другим по порядку, разделяются пробелом или запятой и в конце обязательно перенос строки.
значение1 пробел_или_запятая значение2 пробел_или_запятая значение3 пробел_или_запятая перенос_строки
Давайте выведем значения с аналоговых пинов A0, A1 и A2:
Получим вот такие графики:
![]()
CAN sniffer на Arduino
Задача стояла достаточно простая:
- принимаем пакет из CAN шины
- укладываем полученные данные в свою структуру
- отправляем структуру через последовательный порт
Для того, чтобы отправляемые данные корректно обрабатывались на стороне компьютера, перед каждой очередной порцией данных в поток вставляется префикс из четырёх байтов 0xAA55AA55 (почему-то вспомнились эти байты по последним двум байтам загрузочного сектора DOS, только они там были в другом порядке). Логика такая:
- компьютер читает весь поток из последовательного порта и находит в нём искомую последовательность префикса 0xAA55AA55
- сразу после префикса будут 4 байта идентификатора пакета
- далее длина данных этого пакета, по ней контролируется длина всего пакета
- до 8 байтов данных
Так же я написал простой генератор пакетов данных для отладки, чтобы отлаживаться дома — он просто отправляет в последовательный порт пакеты со случайными данными, что позволяет отлаживать приложение на компьютере в комфортных условиях.
Примерно в это же время прибыли более миниатюрные компоненты Arduino Nano и Mini CAN shield.
![]()
Я спроектировал небольшой корпус, распечатал его и разместил внутри все компоненты.
![]()
Снаружи с одной стороны OBD разъём, с другой — Mini USB. Внутри имеется переключатель для терминирующего резистора.Парсинг цифр
Для чтения целых цифр используем Serial.parseInt() , для дробных – Serial.parseFloat() . Пример, который читает целое число и отправляет его обратно:
Если при парсинге у вас появляются лишние цифры – поставьте “Нет конца строки” в настройках монитора порта
Вы заметите, что после отправки проходит секунда, прежде чем плата ответит в порт. Эта секунда является таймаутом, о котором мы говорили чуть выше. Программа ждёт секунду после принятия последнего символа, чтобы все данные успели прийти. Секунда это очень много, ожидать, скажем, 50 миллисекунд. Это можно сделать при помощи метода setTimeout() .
Теперь после отправки цифры программа будет ждать всего 50 мс и ответит гораздо быстрее!
Ошибки компиляции
Возникает на этапе компиляции прошивки. Ошибки компиляции вызваны проблемами в коде прошивки.
- В некоторых случаях ошибка возникает при наличии кириллицы (русских букв) в пути к папке со скетчем. Решение: завести для скетчей отдельную папочку в корне диска с английским названием.
- В чёрном окошке в самом низу Arduino IDE можно прочитать полный текстошибки и понять, куда копать.
- В скачанных с интернета готовых скетчах часто возникает ошибка с описанием название_файла.h no such file or directory. Это означает, что в скетче используется библиотека , и нужно положить её в Program Files/Arduino/libraries/. Ко всем моим проектам всегда идёт папочка с использованными библиотеками, которые нужно установить. Также библиотеки всегда можно поискать в гугле по название файла.
- При использовании каких-то особых библиотек, методов или функций, ошибкой может стать неправильно выбранная плата в “Инструменты/плата“. Пример: прошивки с библиотекой Mouse.h или Keyboard.h компилируются только для Leonardo и Micro.
- Если прошивку пишете вы, то любые синтаксические ошибки в коде будут подсвечены, а снизу в чёрном окошке можно прочитать более детальное описание, в чём собственно косяк. Обычно указывается строка, в которой сделана ошибка, также эта строка подсвечивается красным.
- Иногда причиной ошибки бывает слишком старая, или слишком новая версия Arduino IDE. Читайте комментарии разработчика скетча
- Ошибка недостаточно свободного места возникает по вполне понятным причинам. Возможно поможет урок по оптимизации кода.
Ассоциация основного файла UNO
![]()
Формат файла: .uno Тип файла: Binary Data Создатель: Unknown Developer Категория файла: Необычные файлы Ключ реестра: HKEY_CLASSES_ROOT\.uno Программные обеспечения, открывающие Binary Data:
![]()
![]()
Windows
Поиск типов файлов
![]()
Популярность файла UNO
Разбивка устройства расширения файла (настольный компьютер / мобильный телефон / планшет)
![]()
ПК (84.34%) ![]()
Мобильные (14.29%) ![]()
Планшет (1.37%) Пробуем прошить ATtiny13
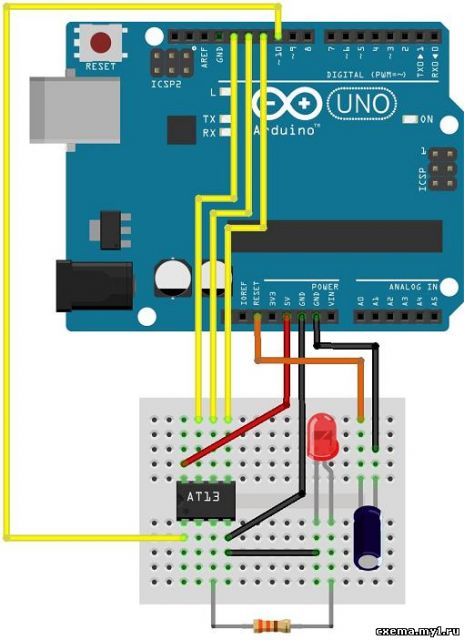
Микросхему ATtiny13 подключаем вот по такой схеме к Arduino UNO
![]()
Программа Arduino_ID_v1.8.9
Программатор Arduino UNOФайл -->> Настройки -->> Дополнительные ссылки для менеджера плат:
Вставляем в поле ссылку ниже.
https://raw.githubusercontent.com/sleemanj/optiboot/master/dists/package_gogo_diy_attiny_index.jso n
Нажать кнопку "ОК"Инструменты -->> Плата -->> Менеджер плат -->>
И в самом низу листа выбрал:Платы загрузились с интернета в папку:
C:\Documents and Settings\пользователь\Local Settings\Application Data\Arduino15Если что, то папку с платами ATtiny13 можно распаковать туда же, без установки, все платы будут работать так-же, архив лежит ниже по ссылке.
Разные версии cores13, для прошивки микросхемы ATtiny13 и не только.Настройки для ATtiny13:
Инструменты -->> Плата: ATtiny13
Инструменты -->> Processor Version: "ATtiny13a"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "Arduino as ISP"Загрузил пробный скетч:
Такой скетч тоже работает:
Загрузка прошла сразу и без ошибок.
Что же среда делает при нажатии на кнопку «Записать загрузчик»?Arduino IDE в данном случае просто выставляет нужные фьюзы микроконтроллера.
К примеру, мне нужно, чтобы ATtiny13 работал на частоте в 4.8 мГц, я выбираю нужную мне частоту и только один раз жму кнопку «Записать загрузчик» — всё. Теперь микроконтроллер будет всегда работать на заданной частоте, если будет нужно изменить частоту опять — проделываем описанную выше процедуру.Сразу скажу, что рост частоты приведёт за собой рост потребления контроллера, чем чаще переключаются транзисторы в микроконтроллере тем больше он потребляет.
Для каких-то там мигалок, я считаю, выполнение 1.2 миллиона инструкций будет с лихвой, да и на такой частоте микроконтроллер потребляет около 1 миллиампера.CAN sniffer на PC с использованием wxWidgets
Ранее я в нескольких проектах использовал библиотеку wxWidgets и о ней у меня только приятные впечатления. Она легковесная, нет необходимости тащить с собой различные библиотеки и даже кросс-платформенная, что вселяет надежду, что интерфейсную часть кода можно перенести без значительных переделок на другие платформы. В конце статьи будет ссылка на скомпилированную программу, если возиться со всем этим не будет желания.
Можно скачать и посмотреть видео (менее восьми минут), а можно выполнить 6 шагов по описанию ниже.
Установка и компиляция wxWidgets:
2. Создать переменную окружения WXWIN указывающую на папку, куда установили или распаковали (например C:\wxWidgets):
Свойства системы -> Дополнительные параметры системы -> Переменные среды -> Создать
WXWIN = C:\wxWidgets3. Из папки C:\wxWidgets\build\msw открыть файл решения под соответствующую Visual Studio (wx_vc16.sln для Visual Studio 2019)
4. В Solution Expolorer, с помощью клавиши Shift, выделить все проекты, кроме _custom_build и зайти в Properties проектов.
5. В разделе C/C++ -> Code Generation изменить параметр Runtime Library:
Для конфигурации Debug выбрать /MTd
Для конфигурации Release выбрать /MT6. Скомпилировать библиотеки wxWidgets по очереди для Debug и Release конфигураций.
Пробное приложение и настройка проекта в Visual Studio (для проверки)
1. В Visual Studio создать Empty Project с указанием типа приложения Desktop Application (.exe)
2. В окне View -> Property Manager для своего проекта правой кнопкой выбрать меню Add existing property sheet… и выбрать файл:
3. Создать файл main.cpp и скопировать в него содержимое файла:
4. В настройках проекта C/C++ -> Code Generation изменить (если пункт не появился — сделать пробную сборку):
Runtime Library для конфигурации Debug: /MTd
Runtime Library для конфигурации Release: /MT5. Дополнительно, если необходимы привилегии UAC, в разделе Linker -> Manifest File:
UAC Execution Level: requireAdministrator
6. Для добавления иконки exe-файлу надо добавить ресурсный файл со следующим содержимым:
Первый реализованный прототип на C++ и wxWidgets показал, что даже нетбук справляется с отображением данных в таблице и я приступил к разработке задуманного.
Архитектурно программа состоит из двух потоков: интерфейсный и поток работы с последовательным портом. Никаких невероятно интересных алгоритмов не применялось. Код обильно снабжён комментариями и должен быть довольно понятен. Ссылка на исходники будет в конце статьи.
Первое что было сделано — раскраска ячеек данных в таблице по давности получения этих данных. Уже в первом прототипе, глядя на 17 строк данных меняющихся непрерывно значений, я понял, что надо как-то различать свежие данные и данные, которые не изменяются или меняется редко. Сделал раскраску в два этапа:
- впервые пришедшие данные выделяются зелёным цветом фона ячеек
- данные пришедшие повторно и далее — выделяются красным фоном, который постепенно выцветает до белого если больше эти данные не меняются
Далее мне захотелось всё-таки проверить, справляется ли последовательный порт с потоком данных. Для этого я на стороне Arduino добавил счётчики количества принятых пакетов и счетчик байтов в пакете. Эти счётчики отправляются на компьютер в пакете с идентификатором 0x000. Программа при получении этих данных не выводит их в таблицу, а отображает в отдельных информационных полях сверху. Полученные результаты даже весьма понравились. В среднем принимается до 750 пакетов/с со скоростью до 9,5 кБ/с, а это где в районе до 80 кбит/с, что вполне по силам последовательному порту. Но всё равно, обмен данными настроен по умолчанию на 500 кбит/с, пусть лучше будет запас.
Добавление возможности записи данных в журнал появилось после того, как подключил параллельно к OBD интерфейсу диагностический адаптер ELM327 и связав его с телефоном, попробовал читать различные данные. Данные пробегали настолько быстро, что увидеть их невозможно. Записав всё это в журнал, можно потом спокойно сесть и посмотреть передаваемые данные. Для этого в журнал могут записываться даже ASCII текстовые данные. Так же можно выбирать тип файла, символ разделитель и настроить фильтр пакетов кликом в таблице по указанному идентификатору пакета и нажатию кнопки «Добавить ID в фильтр» (по умолчанию записываются все данные), если запись всех данных избыточна.
Именно тогда пришло осознание, что все приложения для телефона, которые производят всякую «диагностику» через связку ELM327 и телефон, не общаются напрямую с CAN шиной автомобиля. Они всего лишь используют функционал диагностики OBD через CAN шину посредством обращения к CAN ID 0x7E0. Обычно это адрес контроллера мотора (ЭБУ), ответ же от него приходит в пакете с идентификатором 0x7E8. А вот все остальные пакеты данных — это так называемый Vendor Specific и ни один производитель так просто их не раскроет (хотя есть пример: Ford выпустил SDK для своих автомобилей).
Продолжая изучать что же передаётся в этих пакетах пришёл к ещё одной идее: при клике на ячейку в таблице, в окне программы справа выводить двоичное и десятичное значение этого байта, а так же брать следующий байт и дополнять до слова. Далее это слово умножать на некий коэффициент и получить десятичный результат. Звучит не очень понятно, но вот в связи с чем это делалось: обороты мотора приходят в пакете CAN ID 0x180, в первых двух байтах. Эти два байта дают некое слово, которое пропорционально оборотам. Если значение этого слова разделить на 8, то получатся текущие обороты. Поэтому указывается множитель 0,125, как обратная величина от 8. Далее это слово визуализируется в графике с динамической подстройкой по амплитуде. В принципе, множитель можно искать в обратной последовательности: нашёл ячейки, которые по графику очень похожи на обороты мотора или ещё что-то искомое, после чего подгоняется множитель для получения действительных значений.
Ну а двоичное представление позволяет искать различные битовые индикаторы. Например поиск индикаторов указателей поворота сводится к тому, чтобы включить их и наблюдать какая ячейка начинает изменяться, в примере ниже это CAN ID 0x481 байт 2. После чего клик по ячейке приводит к отображению её двоичного значения в соответствующем поле, где уже видны переключающиеся младшие два бита (левый, правый и если вместе — аварийная сигнализация).
И напоследок мне понадобилось сделать отправку некоторых управляющих данных в CAN шину и посмотреть реакцию на эти команды. В программу на Arduino был добавлен код, который принимает данные со стороны компьютера и передаёт в CAN шину. Именно на этом этапе пришлось отказаться от CyberLib, так как у неё не было поддержки прерывания поступления данных в буфер последовательного порта. В программе на компьютере добавил несколько текстовых полей, в которые можно ввести различные параметры и таблицу для просмотра ответа исполнительного устройства. В примере ниже показаны команды управления включить/отключить первую скорость вентилятора охлаждения (0x0A) и включить/отключить муфту кондиционера (0x0B).Практически нигде не найти полные расшифровки данных производителей, тем более официальных. В лучшем случае это будут чьи-то изыскания в рамках реализации какой-то дополнительной функции. CAN sniffer может помочь в поиске этих данных. Я смог найти порядка 40 различных параметров автомобиля и ради эксперимента, на базе полученных данных, я сделал собственное управление вентилятором охлаждения.
Чтение из порта
Проблемы возникают при попытке принять данные в порт. Дело в том, что метод read() читает один символ, а если вы отправите длинное число или строку – программа получит его по одному символу. Чтение сложных данных называется парсинг. Его можно делать вручную, об этом мы поговорим в отдельном уроке из блока “Алгоритмы”. В рамках этого урока рассмотрим встроенные инструменты для парсинга Serial.
Чтобы не нагружать программу чтением пустого буфера, нужно использовать конструкцию
Таким образом чтение будет осуществляться только в том случае, если в буфере есть какие-то данные.
CAN scanner на Arduino
Первый прибыл шилд для классической Arduino UNO. Да он стоит значительно дороже своих более мелких собратьев, но он имеет на борту всё необходимое и даже две кнопки.
![]()
Именно с ним я и начал все эксперименты. Собрал простую схему с этим шилдом и жидкокристаллическим двухстрочным экраном. Цель была — вывести на экран хоть какие-то данные. Перебирал различные библиотеки для работы с CAN шиной на Arduino (сразу скажу, что правильная и рабочая библиотека называется CAN-BUS Shield by Seeed Studio с заголовочным файлом mcp_can.h), поменял кварцевый резонатор на шилде на 16 МГц (изначально стоял 8 МГц) — данных не было.
На шилде установлены две микросхемы: контроллер CAN шины MCP2515 и драйвер CAN шины TJA1050. Почитав документацию и различные форумы, решил поменять TJA1050 на более каноничный драйвер MCP2551 и данные появились. Возможно TJA1050 была изначально неисправна, так как с её подключением двумя проводками ошибиться было очень сложно, к тому же я использовал OBD и DB9 разъёмы для подключения.
За пару часов был написан простой CAN scanner, который выводил на жидкокристаллический дисплей номер захваченного пакета, его ID и до 8 байтов данных этого пакета.
![]()
Вот тут и пригодились кнопочки на шилде, которыми я реализовал переключение между номером отображаемого пакета.
Вообще, эти кнопочки потом много для чего пригодились. Именно с ними я начинал тестирование управления некоторыми устройствами автомобиля.
Начало было положено, надо переходить к более интересной реализации.
Пробуем прошить ATtiny13
Микросхему ATtiny13 подключаем вот по такой схеме к Arduino UNO
![]()
Программа Arduino_ID_v1.8.9
Программатор Arduino UNOФайл -->> Настройки -->> Дополнительные ссылки для менеджера плат:
Вставляем в поле ссылку ниже.
https://raw.githubusercontent.com/sleemanj/optiboot/master/dists/package_gogo_diy_attiny_index.jso n
Нажать кнопку "ОК"Инструменты -->> Плата -->> Менеджер плат -->>
И в самом низу листа выбрал:Платы загрузились с интернета в папку:
C:\Documents and Settings\пользователь\Local Settings\Application Data\Arduino15Если что, то папку с платами ATtiny13 можно распаковать туда же, без установки, все платы будут работать так-же, архив лежит ниже по ссылке.
Разные версии cores13, для прошивки микросхемы ATtiny13 и не только.Настройки для ATtiny13:
Инструменты -->> Плата: ATtiny13
Инструменты -->> Processor Version: "ATtiny13a"
Инструменты -->> Порт: "ваш порт"
Инструменты -->> Программатор: "Arduino as ISP"Загрузил пробный скетч:
Такой скетч тоже работает:
Загрузка прошла сразу и без ошибок.
Что же среда делает при нажатии на кнопку «Записать загрузчик»?Arduino IDE в данном случае просто выставляет нужные фьюзы микроконтроллера.
К примеру, мне нужно, чтобы ATtiny13 работал на частоте в 4.8 мГц, я выбираю нужную мне частоту и только один раз жму кнопку «Записать загрузчик» — всё. Теперь микроконтроллер будет всегда работать на заданной частоте, если будет нужно изменить частоту опять — проделываем описанную выше процедуру.Сразу скажу, что рост частоты приведёт за собой рост потребления контроллера, чем чаще переключаются транзисторы в микроконтроллере тем больше он потребляет.
Для каких-то там мигалок, я считаю, выполнение 1.2 миллиона инструкций будет с лихвой, да и на такой частоте микроконтроллер потребляет около 1 миллиампера.Частые ошибки в коде, приводящие к ошибке компиляции
- expected ‘,’ or ‘;’ – пропущена запятая или точка запятой на предыдущей строке
- stray ‘\320’ in program – русские символы в коде
- expected unqualified-id before numeric constant – имя переменной не может начинаться с цифры
- … was not declared in this scope – переменная или функция используется, но не объявлена. Компилятор не может её найти
- redefinition of … – повторное объявление функции или переменной
- storage size of … isn’t known – массив задан без указания размера
Устранение неполадок при открытии файлов UNO
Предупреждения
Помимо ошибок, по причине которых проект вообще не загрузится в плату и не будет работать, есть ещё предупреждения, которые выводятся оранжевым текстом в чёрной области лога ошибок. Предупреждения могут появиться даже тогда, когда выше лога ошибок появилась надпись “Загрузка завершена“. Это означает, что в прошивке нет критических ошибок, она скомпилировалась и загрузилась в плату. Что же тогда означают предупреждения? Чаще всего можно увидеть такие:
Завершая раздел Введение в Arduino поговорим о вопросах, которые очень часто возникают у новичков:
- Ардуину можно прошить только один раз? Нет, несколько десятков тысяч раз, всё упирается в ресурс Flash памяти. А он довольно большой.
- Как стереть/нужно ли стирать старую прошивку при загрузке новой? Память автоматически очищается при прошивке, старая прошивка автоматически удаляется.
- Можно ли записать две прошивки, чтобы они работали вместе? Нет, при прошивке удаляются абсолютно все старые данные. Из двух прошивок нужно сделать одну, причём так, чтобы не было конфликтов. Подробнее в этом уроке.
- Можно ли “вытащить” прошивку с уже прошитой Ардуины? Теоретически можно, но только в виде нечитаемого машинного кода, в который преобразуется прошивка на С++ при компиляции, т.е. вам это НИКАК не поможет, если вы не имеете диплом по низкоуровневому программированию. Подробнее в этом уроке.
- Зачем это нужно? Например есть у нас прошитый девайс, и мы хотим его “клонировать”. В этом случае да, есть вариант сделать дамп прошивки и загрузить его в другую плату на таком же микроконтроллере.
- Если есть желание почитать код – увы, прошивка считывается в виде бинарного машинного кода, превратить который обратно в читаемый Си-подобный код обычному человеку не под силу.
- Вытащить прошивку, выражаясь более научно – сделать дамп прошивки, можно при помощи ISP программатора, об этом можно почитать здесь.
- Снять дамп прошивки можно только в том случае, если разработчик не ограничил такую возможность, например записав лок-биты, запрещающие считывание Flash памяти, или вообще отключив SPI шину. Если же разработчик – вы, и есть желание максимально защитить своё устройство от копирования – гуглите про лок-биты и отключение SPI
Парсинг текста
Проще всего прочитать текст в String-строку (урок про них). Это максимально не оптимально, но зато довольно просто для восприятия:
Данный пример выводит любой текст, который был отправлен в монитор порта.
Читайте также: