
Принципы адресации основной памяти компьютера
Аннотация: В настоящей лекции рассматриваются простейшие способы управления памятью в ОС. Физическая память компьютера имеет иерархическую структуру. Программа представляет собой набор сегментов в логическом адресном пространстве. ОС осуществляет связывание логических и физических адресных пространств.
Введение
Главная задача компьютерной системы – выполнять программы. Программы вместе с данными, к которым они имеют доступ , в процессе выполнения должны (по крайней мере частично) находиться в оперативной памяти . Операционной системе приходится решать задачу распределения памяти между пользовательскими процессами и компонентами ОС. Эта деятельность называется управлением памятью. Таким образом, память ( storage , memory ) является важнейшим ресурсом, требующим тщательного управления. В недавнем прошлом память была самым дорогим ресурсом.
Часть ОС, которая отвечает за управление памятью , называется менеджером памяти.
Физическая организация памяти компьютера
Запоминающие устройства компьютера разделяют, как минимум, на два уровня: основную (главную, оперативную , физическую ) и вторичную (внешнюю) память.
Основная память представляет собой упорядоченный массив однобайтовых ячеек, каждая из которых имеет свой уникальный адрес (номер). Процессор извлекает команду из основной памяти , декодирует и выполняет ее. Для выполнения команды могут потребоваться обращения еще к нескольким ячейкам основной памяти . Обычно основная память изготавливается с применением полупроводниковых технологий и теряет свое содержимое при отключении питания.
Вторичную память (это главным образом диски) также можно рассматривать как одномерное линейное адресное пространство , состоящее из последовательности байтов. В отличие от оперативной памяти , она является энергонезависимой, имеет существенно большую емкость и используется в качестве расширения основной памяти .
Эту схему можно дополнить еще несколькими промежуточными уровнями, как показано на рис. 8.1. Разновидности памяти могут быть объединены в иерархию по убыванию времени доступа, возрастанию цены и увеличению емкости.
Многоуровневую схему используют следующим образом. Информация, которая находится в памяти верхнего уровня, обычно хранится также на уровнях с большими номерами. Если процессор не обнаруживает нужную информацию на i-м уровне, он начинает искать ее на следующих уровнях. Когда нужная информация найдена, она переносится в более быстрые уровни.
Локальность
Оказывается, при таком способе организации по мере снижения скорости доступа к уровню памяти снижается также и частота обращений к нему.
Ключевую роль здесь играет свойство реальных программ, в течение ограниченного отрезка времени способных работать с небольшим набором адресов памяти. Это эмпирически наблюдаемое свойство известно как принцип локальности или локализации обращений.
Свойство локальности (соседние в пространстве и времени объекты характеризуются похожими свойствами) присуще не только функционированию ОС, но и природе вообще. В случае ОС свойство локальности объяснимо, если учесть, как пишутся программы и как хранятся данные, то есть обычно в течение какого-то отрезка времени ограниченный фрагмент кода работает с ограниченным набором данных. Эту часть кода и данных удается разместить в памяти с быстрым доступом. В результате реальное время доступа к памяти определяется временем доступа к верхним уровням, что и обусловливает эффективность использования иерархической схемы. Надо сказать, что описываемая организация вычислительной системы во многом имитирует деятельность человеческого мозга при переработке информации. Действительно, решая конкретную проблему, человек работает с небольшим объемом информации, храня не относящиеся к делу сведения в своей памяти или во внешней памяти (например, в книгах).
Кэш процессора обычно является частью аппаратуры, поэтому менеджер памяти ОС занимается распределением информации главным образом в основной и внешней памяти компьютера. В некоторых схемах потоки между оперативной и внешней памятью регулируются программистом (см. например, далее оверлейные структуры ), однако это связано с затратами времени программиста, так что подобную деятельность стараются возложить на ОС.
Адреса в основной памяти , характеризующие реальное расположение данных в физической памяти , называются физическими адресами. Набор физических адресов, с которым работает программа, называют физическим адресным пространством .
Логическая память
Аппаратная организация памяти в виде линейного набора ячеек не соответствует представлениям программиста о том, как организовано хранение программ и данных. Большинство программ представляет собой набор модулей, созданных независимо друг от друга. Иногда все модули, входящие в состав процесса, располагаются в памяти один за другим, образуя линейное пространство адресов. Однако чаще модули помещаются в разные области памяти и используются по-разному.
Схема управления памятью, поддерживающая этот взгляд пользователя на то, как хранятся программы и данные, называется сегментацией. Сегмент – область памяти определенного назначения, внутри которой поддерживается линейная адресация. Сегменты содержат процедуры, массивы, стек или скалярные величины , но обычно не содержат информацию смешанного типа.
По-видимому, вначале сегменты памяти появились в связи с необходимостью обобществления процессами фрагментов программного кода (текстовый редактор, тригонометрические библиотеки и т. д.), без чего каждый процесс должен был хранить в своем адресном пространстве дублирующую информацию. Эти отдельные участки памяти, хранящие информацию, которую система отображает в память нескольких процессов, получили название сегментов . Память, таким образом, перестала быть линейной и превратилась в двумерную. Адрес состоит из двух компонентов: номер сегмента , смещение внутри сегмента . Далее оказалось удобным размещать в разных сегментах различные компоненты процесса (код программы, данные, стек и т. д.). Попутно выяснилось, что можно контролировать характер работы с конкретным сегментом , приписав ему атрибуты, например права доступа или типы операций, которые разрешается производить с данными, хранящимися в сегменте .
Некоторые сегменты , описывающие адресное пространство процесса, показаны на рис. 8.2. Более подробная информация о типах сегментов имеется в лекции 10.
Большинство современных ОС поддерживают сегментную организацию памяти. В некоторых архитектурах (Intel, например) сегментация поддерживается оборудованием.
Адреса, к которым обращается процесс, таким образом, отличаются от адресов, реально существующих в оперативной памяти . В каждом конкретном случае используемые программой адреса могут быть представлены различными способами. Например, адреса в исходных текстах обычно символические. Компилятор связывает эти символические адреса с перемещаемыми адресами (такими, как n байт от начала модуля). Подобный адрес, сгенерированный программой, обычно называют логическим (в системах с виртуальной памятью он часто называется виртуальным) адресом. Совокупность всех логических адресов называется логическим (виртуальным) адресным пространством .
Связывание адресов
Итак логические и физические адресные пространства ни по организации, ни по размеру не соответствуют друг другу. Максимальный размер логического адресного пространства обычно определяется разрядностью процессора (например, 2 32 ) и в современных системах значительно превышает размер физического адресного пространства . Следовательно, процессор и ОС должны быть способны отобразить ссылки в коде программы в реальные физические адреса, соответствующие текущему расположению программы в основной памяти . Такое отображение адресов называют трансляцией (привязкой) адреса или связыванием адресов (см. рис. 8.3).
Связывание логического адреса, порожденного оператором программы, с физическим должно быть осуществлено до начала выполнения оператора или в момент его выполнения. Таким образом, привязка инструкций и данных к памяти в принципе может быть сделана на следующих шагах [Silberschatz, 2002].
Мне периодически приходится объяснять разным людям некоторые аспекты архитектуры Intel® IA-32, в том числе замысловатость системы адресации данных в памяти, которая, похоже, реализовала почти все когда-то придуманные идеи. Я решил оформить развёрнутый ответ в этой статье. Надеюсь, что он будет полезен ещё кому-нибудь.
При исполнении машинных инструкций считываются и записываются данные, которые могут находиться в нескольких местах: в регистрах самого процессора, в виде констант, закодированных в инструкции, а также в оперативной памяти. Если данные находятся в памяти, то их положение определяется некоторым числом — адресом. По ряду причин, которые, я надеюсь, станут понятными в процессе чтения этой статьи, исходный адрес, закодированный в инструкции, проходит через несколько преобразований.

На рисунке — сегментация и страничное преобразование адреса, как они выглядели 27 лет назад. Иллюстрация из Intel 80386 Programmers's Reference Manual 1986 года. Забавно, что в описании рисунка есть аж две опечатки: «80306 Addressing Machanism». В наше время адрес подвергается более сложным преобразованиям, а иллюстрации больше не делают в псевдографике.
Начнём немного с конца — с цели всей цепочки преобразований.
Физический адрес
Конечный результат всех преобразований других типов адресов, перечисленных далее в этой статье — физический адрес. На нём кончается работа внутри центрального процессора по преобразованию адресов.
На самом деле, легко понять, что это ещё не конец. В платформе, которая должна обработать запрос данных от процессора, может быть несколько чипов DRAM, имеющих собственную структуру разбиения на блоки, а также различные периферийные устройства, отображённые на общее пространство физической памяти. Дальнейший путь транзакции с некоторым физическим адресом будет зависеть от конфигурации нескольких декодеров, находящихся на её пути внутри устройств платформы.
Эффективный адрес
Эффективный адрес — это начало пути. Он задаётся в аргументах индивидуальной машинной инструкции, и вычисляется из значений регистров, смещений и масштабирующих коэффициентов, заданных в ней явно или неявно.
Например, для инструкции (ассемблер в AT&T-нотации)
addl %eax, 0x11(%ebp, %edx, 8)
эффективный адрес операнда-назначения будет вычислен по формуле:
eff_addr = EBP + EDX * 8 + 0x11
Логический адрес
Без знания номера и параметров сегмента, в котором указан эффективный адрес, последний бесполезен. Сам сегмент выбирается ещё одним числом, именуемым селектором. Пара чисел, записываемая как selector:offset , получила имя логический адрес. Так как активные селекторы хранятся в группе специальных регистров, чаще всего вместо первого числа в паре записывается имя регистра, например, ds:0x11223344.
Здесь обычно у тех, кто столкнулся с этими понятиями впервые, голова начинает идти кругом. Несколько упростить (или усложнить) ситуацию помогает тот факт, что почти всегда выбор селектора (и связанного с ним сегмента) делается исходя из «смысла» доступа. По умолчанию, если в кодировке машинной инструкции не сказано иного, для получения адресов кода используются логические адреса с селектором CS, для данных — с DS, для стека — с SS.
Линейный адрес
Эффективный адрес — это смещение от начала сегмента — его базы. Если сложить базу и эффективный адрес, то получим число, называемое линейным адресом:
lin_addr = segment.base + eff_addr
Преобразование логический → линейный не всегда может быть успешным, так как при его исполнении проверяется несколько условий на свойства сегмента, записанных в полях его дескриптора. Например, проверяется выход за границы сегмента и права доступа.
Описанное выше верно при включенной сегментации. В 16-битном реальном режиме смысл селекторов другой, они хранят только базу, а преобразование не осуществляет сегментных проверок. Фактически, обозначения CS, DS, FS, GS, ES, SS имеют совершенно разный смысл в этих двух режимах, что добавляет путаницы.
Сегментация была модной на некотором этапе развития вычислительной техники. В настоящее она почти всюду была заменена другими механизмами, и используется только для специфических задач. Так, в режиме IA-32e (64-битном) только два сегмента могут иметь ненулевую базу. Для остальных четырёх в этом режиме всегда линейный адрес == эффективный.
Что такое виртуальный адрес?
В литературе и в документации других архитектур встречается ещё один термин — виртуальный адрес. Он не используется в документации Intel на IA-32, однако встречается, например, в описании Intel® Itanium, в котором сегментация не используется. Можно смело считать, что для IA-32 виртуальный == линейный.
В советской литературе по вычислительной технике этот вид адресов также именовался математическим.
Страничное преобразование
Следующее после сегментации преобразование адресов: линейный → физический — имеет множество вариаций в своём алгоритме, в зависимости от того, в каком режиме (32-битном, PAE или 64-битном) находится процессор.
Примечательно, сколько различных бит из разных системных регистров процессора влияют на процесс страничного преобразования в настоящее время. Я просмотрел свежую сентябрьскую редакцию Intel SDM [1], и вот полный список: CR0.WP, CR0.PG, CR4.PSE, CR4.PAE, CR4.PGE, CR4.PCIDE, CR4.SMEP, CR4.SMAP, IA32_EFER.LME, IA32_EFER.NXE, EFLAGS.AC.
Однако общая идея всегда одна и та же: линейный адрес разбивается на несколько частей, каждая из которых служит индексом в одной из системных таблиц, хранящихся в памяти. Записи в таблицах — это адреса начала таблицы следующего уровня или, для последнего уровня — искомая информация о физическом адресе страницы в памяти и её свойствах. Самые младшие биты не преобразуются, а используются для адресации внутри найденной страницы. Например, для режима PAE с размером страниц 4 кбайт преобразование выглядит так:

В разных режимах процессора различается число и ёмкость этих таблиц. Преобразование может завершиться неудачей, если очередная таблица не содержит валидных данных, или права доступа, хранящиеся в последней из них, запрещают доступ к странице; например, при записи в регионы, помеченные как «только для чтения», или попытке чтения памяти ядра из непривилегированного процесса.
Гостевой физический
До введения возможностей аппаратной виртуализации в процессорах Intel страничное преобразование было последним в цепочке. Когда же на одной системе работают несколько виртуальных машин, то физические адреса, получаемые в каждой из них, приходится транслировать ещё один раз. Это можно делать программным образом, или же аппаратно, если процессор поддерживает функциональность EPT (англ. Extended Page Table). Адрес, раньше называвшийся физическим, был переименован в гостевой физический для того, чтобы отличать его от настоящего физического. Они связаны с помощью EPT-преобразования. Алгоритм последнего схож с ранее описанным страничным преобразованием: набор связанных таблиц с общим корнем, последний уровень которых определяет, существует ли физическая страница для указанной гостевой физической.
Полная картина
Я попытался собрать все преобразования адреса в одну иллюстрацию. В ней преобразования обозначены стрелками, типы адресов обведены в рамки.

Как уже было сказано выше, каждое из преобразований может вернуть ошибку для адресов, не имеющих представления в следующем по цепочке виде. Устранение подобных проблем — это задача операционных систем и мониторов виртуальных машин, реализующих абстракцию виртуальной памяти.
Заключение
Эволюция, что в природе, что в технике — странная вещь. Она порождает неожиданные структуры, необъяснимые с точки зрения рационального проектирования. Её творения полны атавизмов, правила их поведения иногда почти полностью состоят из исключений. Для того, чтобы понять работу такой системы, часто требуется прокрутить её эволюцию с самого начала, и под нагромождениями всех слоёв найти истину в виде принципа: «ничего не выбрасывать». Я склонен считать архитектуру IA-32 замечательным примером эволюционного развития.
Вскоре после завершения написания этой статьи я натолкнулся на презентацию об архитектуре IBM System z, которая примечательна в том числе своей долгой и интересной историей поддержки виртуализации. В этом документе нашлось перечисление всех типов адресов памяти, используемых в System z:
За последнюю неделю дважды объяснял людям как организована работа с памятью в х86, с целью чтобы не объяснять в третий раз написал эту статью.
И так, чтобы понять организацию памяти от вас потребуется знания некоторых базовых понятий, таких как регистры, стек и тд. Я по ходу попробую объяснить и это на пальцах, но очень кратко потому что это не тема для этой статьи. Итак начнем.
Как известно программист, когда пишет программы работает не с физическим адресом, а только с логическим. И то если он программирует на ассемблере. В том же Си ячейки памяти от программиста уже скрыты указателями, для его же удобства, но если грубо говорить указатель это другое представление логического адреса памяти, а в Java и указателей нет, совсем плохой язык. Однако грамотному программисту не помешают знания о том как организована память хотя бы на общем уровне. Меня вообще очень огорчают программисты, которые не знают как работает машина, обычно это программисты Java и прочие php-парни, с квалификацией ниже плинтуса.
Так ладно, хватит о печальном, переходим к делу.
Рассмотрим адресное пространство программного режима 32 битного процессора (для 64 бит все по аналогии)
Адресное пространство этого режима будет состоять из 2^32 ячеек памяти пронумерованных от 0 и до 2^32-1.
Программист работает с этой памятью, если ему нужно определить переменную, он просто говорит ячейка памяти с адресом таким-то будет содержать такой-то тип данных, при этом сам програмист может и не знать какой номер у этой ячейки он просто напишет что-то вроде:
int data = 10;
компьютер поймет это так: нужно взять какую-то ячейку с номером стопицот и поместить в нее цело число 10. При том про адрес ячейки 18894 вы и не узнаете, он от вас будет скрыт.
Все бы хорошо, но возникает вопрос, а как компьютер ищет эту ячейку памяти, ведь память у нас может быть разная:
3 уровень кэша
2 уровень кэша
1 уровень кэша
основная память
жесткий диск
Это все разные памяти, но компьютер легко находит в какой из них лежит наша переменная int data.
Этот вопрос решается операционной системой совместно с процессором.
Вся дальнейшая статья будет посвящена разбору этого метода.
Архитектура х86 поддерживает стек.
Стек это непрерывная область оперативной памяти организованная по принципу стопки тарелок, вы не можете брать тарелки из середины стопки, можете только брать верхнюю и класть тарелку вы тоже можете только на верх стопки.
В процессоре для работы со стеком организованны специальные машинные коды, ассемблерные мнемоники которых выглядят так:
push operand
помещает операнд в стек
pop operand
изымает из вершины стека значение и помещает его в свой операнд
Стек в памяти растет сверху вниз, это значит что при добавлении значения в него адрес вершины стека уменьшается, а когда вы извлекаете из него, то адрес вершины стека увеличивается.
Теперь кратко рассмотрим что такое регистры.
Это ячейки памяти в самом процессоре. Это самый быстрый и самый дорогой тип памяти, когда процессор совершает какие-то операции со значением или с памятью, он берет эти значения непосредственно из регистров.
В процессоре есть несколько наборов логик, каждая из которых имеет свои машинные коды и свои наборы регистров.
Basic program registers (Основные программные регистры) Эти регистры используются всеми программами с их помощью выполняется обработка целочисленных данных.
Floating Point Unit registers (FPU) Эти регистры работают с данными представленными в формате с плавающей точкой.
Еще есть MMX и XMM registers эти регистры используются тогда, когда вам надо выполнить одну инструкцию над большим количеством операндов.
Рассмотрим подробнее основные программные регистры. К ним относятся восемь 32 битных регистров общего назначения: EAX, EBX, ECX, EDX, EBP, ESI, EDI, ESP
Для того чтобы поместить в регистр данные, или для того чтобы изъять из регистра в ячейку памяти данные используется команда mov:
mov eax, 10
загружает число 10 в регистр eax.
mov data, ebx
копирует число, содержащееся в регистре ebx в ячейку памяти data.
Регистр ESP содержит адрес вершины стека.
Кроме регистров общего назначения, к основным программным регистрам относят шесть 16битных сегментных регистров: CS, DS, SS, ES, FS, GS, EFLAGS, EIP
EFLAGS показывает биты, так называемые флаги, которые отражают состояние процессора или характеризуют ход выполнения предыдущих команд.
В регистре EIP содержится адрес следующей команды, которая будет выполнятся процессором.
Я не буду расписывать регистры FPU, так как они нам не понадобятся. Итак наше небольшое отступление про регистры и стек закончилось переходим обратно к организации памяти.
Как вы помните целью статьи является рассказ про преобразование логической памяти в физическую, на самом деле есть еще промежуточный этап и полная цепочка выглядит так:
Логический адрес --> Линейный (виртуальный)--> Физический
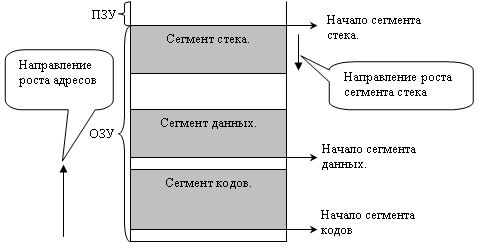
Все линейное адресное пространство разбито на сегменты. Адресное пространство каждого процесса имеет по крайней мере три сегмента:
Сегмент кода. (содержит команды из нашей программы, которые будут исполнятся.)
Сегмент данных. (Содержит данные, то бишь переменные)
Сегмент стека, про который я писал выше.
Линейный адрес вычисляется по формуле:
линейный адрес=Базовый адрес сегмента(на картинке это начало сегмента) + смещение
Сегмент кода
Базовый адрес сегмента кода берется из регистра CS. Значение смещения для сегмента кода берется из регистра EIP, в котором хранится адрес инструкции, после исполнения которой, значение EIP увеличивается на размер этой команды. Если команда занимает 4 байта, то значение EIP увеличивается на 4 байта и будет указывать уже на следующую инструкцию. Все это делается автоматически без участия программиста.
Сегментов кода может быть несколько в нашей памяти. В нашем случае он один.
Сегмент данных
Данные загружаются в регистры DS, ES, FS, GS
Это значит что сегментов данных может быть до 4х. На нашей картинке он один.
Смещение внутри сегмента данных задается как операнд команды. По дефолту используется сегмент на который указывает регистр DS. Для того чтобы войти в другой сегмент надо это непосредственно указать в команде префикса замены сегмента.
Сегмент стека
Используемый сегмент стека задается значением регистра SS.
Смещение внутри этого сегмента представлено регистром ESP, который указывает на вершину стека, как вы помните.
Сегменты в памяти могут друг друга перекрывать, мало того базовый адрес всех сегментов может совпадать например в нуле. Такой вырожденный случай называется линейным представлением памяти. В современных системах, память как правило так организована.
Теперь рассмотрим определение базовых адресов сегмента, я писал что они содержаться в регистрах SS, DS, CS, но это не совсем так, в них содержится некий 16 битный селектор, который указывает на некий дескриптор сегментов, в котором уже хранится необходимый адрес.
Так выглядит селектор, в тринадцати его битах содержится индекс дескриптора в таблице дескрипторов. Не хитро посчитать будет что 2^13 = 8192 это максимальное количество дескрипторов в таблице.
Вообще дескрипторных таблиц бывает два вида GDT и LDT Первая называется глобальная таблица дескрипторов, она в системе всегда только одна, ее начальный адрес, точнее адрес ее нулевого дескриптора хранится в 48 битном системном регистре GDTR. И с момента старта системы не меняется и в свопе не принимает участия.
А вот значения дескрипторов могут меняться. Если в селекторе бит TI равен нулю, тогда процессор просто идет в GDT ищет по индексу нужный дескриптор с помощью которого осуществляет доступ к этому сегменту.
Пока все просто было, но если TI равен 1 тогда это означает что использоваться будет LDT. Таблиц этих много, но использоваться в данный момент будет та селектор которой загружен в системный регистр LDTR, который в отличии от GDTR может меняться.
Индекс селектора указывает на дескриптор, который указывает уже не на базовый адрес сегмента, а на память в котором хранится локальная таблица дескрипторов, точнее ее нулевой элемент. Ну а дальше все так же как и с GDT. Таким образом во время работы локальные таблицы могут создаваться и уничтожаться по мере необходимости. LDT не могут содержать дескрипторы на другие LDT.
Итак мы знаем как процессор добирается до дескриптора, а что содержится в этом дескрипторе посмотрим на картинке:
Дескрипторы состоит из 8 байт.
Биты с 15-39 и 56-63 содержат линейный базовый адрес описываемым данным дескриптором сегмента. Напомню нашу формулу для нахождения линейного адреса:
линейный адрес = базовый адрес + смещение
[база; база+предел)
В зависимости от 55 G-бита(гранулярити), предел может измеряться в байтах при нулевом значении бита и тогда максимальный предел составит 1 мб, или в значении 1, предел измеряется страницами, каждая из которых равна 4кб. и максимальный размер такого сегмента будет 4Гб.
Для сегмента стека предел будет в интервале:
(база+предел; вершина]
Кстати интересно почему база и предел так рвано располагаются в дескрипторе. Дело в том что процессоры х86 развивались эволюционно и во времена 286х дескрипторы были по 8 бит всего, при этом старшие 2 байта были зарезервированы, ну а в последующих моделях процессоров с увеличением разрядности дескрипторы тоже выросли, но для сохранения обратной совместимости пришлось оставить структуру как есть.
Значение адреса «вершина» зависит от 54го D бита, если он равен 0, тогда вершина равна 0xFFF(64кб-1), если D бит равен 1, тогда вершина равна 0xFFFFFFFF (4Гб-1)
С 41-43 бит кодируется тип сегмента.
000 — сегмент данных, только считывание
001 — сегмент данных, считывание и запись
010 — сегмент стека, только считывание
011 — сегмент стека, считывание и запись
100 — сегмент кода, только выполнение
101- сегмент кода, считывание и выполнение
110 — подчиненный сегмент кода, только выполнение
111 — подчиненный сегмент кода, только выполнение и считывание
44 S бит если равен 1 тогда дескриптор описывает реальный сегмент оперативной памяти, иначе значение S бита равно 0.
Самым важным битом является 47-й P бит присутствия. Если бит равен 1 значит, что сегмент или локальная таблица дескрипторов загружена в оперативку, если этот бит равен 0, тогда это означает что данного сегмента в оперативке нет, он находится на жестком диске, случается прерывание, особый случай работы процессора запускается обработчик особого случая, который загружает нужный сегмент с жесткого диска в память, если P бит равен 0, тогда все поля дескриптора теряют смысл, и становятся свободными для сохранения в них служебной информации. После завершения работы обработчика, P бит устанавливается в значение 1, и производится повторное обращение к дескриптору, сегмент которого находится уже в памяти.
На этом заканчивается преобразование логического адреса в линейный, и я думаю на этом стоит прерваться. В следующий раз я расскажу вторую часть преобразования из линейного в физический.
А так же думаю стоит немного поговорить о передачи аргументов функции, и о размещении переменных в памяти, чтобы была какая-то связь с реальностью, потому размещение переменных в памяти это уже непосредственно, то с чем вам приходится сталкиваться в работе, а не просто какие-то теоретические измышления для системного программиста. Но без понимания, как устроена память невозможно понять как эти самые переменные хранятся в памяти.
В общем надеюсь было интересно и до новых встреч.
Необходимо отметить, что все распространенные операционные системы, если для работы нужно больше памяти, чем физически присутствует в компьютере, не прекращают работу, а сбрасывают неиспользуемое в данный момент содержимое памяти в дисковый файл (называемый свопом - swap) и затем по мере необходимости « перегоняют » данные между ОП и свопом. Это гораздо медленнее, чем доступ системы к самой ОП. Поэтому от количества оперативной памяти напрямую зависит скорость системы.
Команды, исполняемые ЭВМ при выполнении программы, равно как и числовые и символьные операнды, хранятся в памяти компьютера. Память состоит из миллионов ячеек, в каждой из которых содержится один бит информации (значения 0 или 1). Биты редко обрабатываются поодиночке, а, как правило, группами фиксированного размера. Для этого память организуется таким образом, что группы по n бит могут записываться и считывается за одну операцию. Группа n бит называется словом, а значение n - длиной слова. Схематически память компьютера можно представить в виде массива слов.
Обычно длина машинного слова компьютеров составляет от 16 до 64 бит. Если длина слова равна 32 битам, в одном слове может храниться 32- разрядное число в дополнительном коде или четыре символа ASCII, занимающих 8 бит каждый. Восемь идущих подряд битов являются байтом. Для представления машинной команды требуется одно или несколько слов.
Отдельные биты, как правило, не адресуются и чаще всего адреса назначаются байтам памяти. Память, в которой каждый байт имеет отдельный адрес, называется памятью с байтовой адресацией. Последовательные байты имеют адреса 0.1, 2 и так далее Таким образом, при использовании слов длиной 32 бита последовательные слова имеют адреса 1.4, 8, . и каждое слово состоит из 4 байт.
Прямой и обратный порядок байтов
Существует два способа адресации байтов в словах:
в прямом порядке. Прямым порядком байтов ( little-endian) называется система адресации, при которой байты адресуются справа налево, так что наименьший адрес имеет самый младший байт слова (расположенный с правого края);
в обратном порядке. Обратным порядком байтов ( big-endian) называется система адресации, при которой байты адресуются слева направо, так что самый старший байт слова (расположенный с левого края) имеет наименьший адрес.
В ПЭВМ на основе 80 x 86 используется прямой порядок, а в ПЭВМ на основе Motorola 68000 - обратный. В обеих этих системах адреса байтов 0.4, 8 и так далее, применяются в качестве адресов последовательных слов памяти в операциях чтения и записи слов.
Расположение слов в памяти
В случае 32- разрядных слов их естественные границы располагаются по адресам 0.4, 8 и так далее При этом считается, что слова выровнены по адресам в памяти. Если говорить в общем, слова считаются выровненными в памяти в том случае, если адрес начала каждого слова кратен количеству байтов в нем. По практическим причинам, связанным с манипулированием Двоично-кодированными адресами, количество байтов в слове обычно является степенью двойки. Поэтому, если длина слова равна 16 бит ( 2 байтам), выровненные слова начинаются по байтовым адресам 0.2, 4, . а если она равна 64 бит ( 23, то есть 8 байтам), то выровненные слова начинаются по байтовым адресам 0.8, 16, .
Не существует причины, по которой слова не могли бы начинаться с произвольных адресов. Такие слова называются не выровненными. Как правило, слова выравниваются по адресам памяти, но иногда этот принцип нарушается.
Обычно число занимает целое слово, поэтому для того чтобы обратиться к нему, нужно указать адрес слова, по которому оно хранится. Точно так же доступ к отдельно хранящемуся в памяти символу осуществляется по адресу содержащего его байта.
Для доступа к памяти необходимы имена или адреса, определяющие расположение данных в памяти. В качестве адресов традиционно используются числа из диапазона от 0 до 2k- 1 со значением к, достаточным для адресации всей памяти компьютера. Все 2k адресов составляют адресное пространство компьютера. Следовательно, память состоит из 2k адресуемых элементов. Например, использование 24- разрядных (как в процессоре 80286) адресов позволяет адресовать 224 (16 777 216) элементов памяти. Обычно это количество адресуемых элементов обозначается как 16 Мбайт ( 1 Мбайт = 220 = 1 048 576 байт, адресное пространство 8086 и 80186). Поскольку у процессоров 80386.80486 Pentium и их аналогов 32- разрядные адреса, им соответствует адресное пространство в 232 байт, или 4 Гбайт.
Адресное пространство ЭВМ графически может быть изображено прямоугольником, одна из сторон которого представляет разрядность адресуемой ячейки (слова) процессора, а другая сторона - весь диапазон доступных адресов для этого же процессора. Диапазон доступных адресов процессора определяется разрядностью шины адреса системной шины. При этом минимальный номер ячейки памяти (адрес) будет равен 0, а максимальный определяется из формулы M = 2n - 1.
Для шестнадцатиразрядной шины это будет 65 535 (64 К).
Иерархическая организация памяти
Компромиссом между производительностью и объемами памяти является решение использовать иерархию запоминающих устройств, то есть применять иерархическую модель памяти.
Применение иерархических систем памяти оправдывает себя вследствие двух важных факторов - принципа локальности обращений и низкого (экономически выгодного) соотношения стоимость/производительность. Принцип локальности обращений состоит в том, что большинство программ обычно не выполняют обращений ко всем своим командам и данным равновероятно, а в каждый момент времени оказывают предпочтение некоторой части своего адресного пространства.
Иерархия памяти обычно состоит из многих уровней, но в каждый момент времени взаимодействуют только два близлежащих уровня. Минимальная единица информации, которая может присутствовать либо отсутствовать в двухуровневой иерархии, называется блоком или строкой.
Успешное или не успешное обращение к более высокому уровню называют соответственно попаданием ( hit) или промахом ( miss). Попадание - есть обращение к объекту в памяти, который найден на более высоком уровне, в то время как промах означает, что он не найден на этом уровне.
Доля попаданий ( hit r а t е) - доля обращений к данным, найденным на более высоком уровне. Доля промахов ( miss rate) - это доля обращений к данным, которые не найдены на более высоком уровне.
Время обращения при попадании ( hit time) есть время обращения к более высокому уровню иерархии, которое включает в себя, в частности, и время, необходимое для определения того, является ли обращение попаданием или промахом.
Потери на промах ( miss ре n а lt у) есть время для замещения блока в более высоком уровне на блок из более низкого уровня плюс время для пересылки этого блока в требуемое устройство (обычно в процессор).
Потери на промах далее включают в себя два компонента:
время доступа ( access time) - время обращения к первому слову блока при промахе;
время пересылки ( transfer time) - дополнительное время для пересылки оставшихся слов блока. Время доступа связано с задержкой памяти более низкого уровня, а время пересылки - с полосой пропускания канала между устройствами памяти двух смежных уровней.
Кэш-память или cache memory - компонент иерархической памяти - представляет собой буферное ЗУ, работающее со скоростью, обеспечивающей функционирование ЦП без режимов ожидания.
Необходимость создания кэш-памяти возникла потому, что появились процессоры с высоким быстродействием. Между тем для выполнения сложных прикладных процессов нужна большая память. Использование же большой сверхскоростной памяти экономически невыгодно. Поэтому между ОП и процессором стали устанавливать меньшую по размерам высокоскоростную буферную память, или кэш-память. В дальнейшем она была разделена на два уровня - встроенная в процессор ( on-die) и внешняя ( on-motherboard).
Иерархия оперативной памяти
Стратегии управления иерархической памятью
При построении систем с иерархической памятью целью является получение максимальной производительности подсистемы памяти при ее минимальной стоимости. Эффективность той или иной системы кэш-памяти зависит от стратегии управления памятью. Стратегия управления памятью включает: метод отображения основной памяти в кэше; алгоритм взаимодействия между медленной основной и быстрой кэш-памятью; стратегии замещения информации в кэше.
Отображение памяти на кэш
Существует три основных способа размещения блоков (строк) основной памяти в кэше:
кэш-память с прямым отображением ( direct-mapped cache);
полностью ассоциативная кэш-память ( fully associative cache).
частично ассоциативная (или множественно ассоциативная, partial associative, set-associative cache) кэш-память;
Память с прямым отображением. В этом случае каждый блок основной памяти имеет только одно фиксированное место, на котором он может появиться в кэш-памяти. Все блоки основной памяти, имеющие одинаковые младшие разряды в своем адресе, попадают в один блок кэш-памяти. При таком подходе справедливо соотношение:
( Адрес блока кэш-памяти) = ( Адрес блока основной памяти) mod ( Число блоков в кэш-памяти).
Этот тип памяти наиболее прост, но и наименее эффективен, так как данные из разных областей памяти могут конфликтовать из-за единственной строки кэша, где они только и могут быть размещены.
Полностью ассоциативная памят
Может отображать содержимое любой области памяти в любую область кэша, но при этом крайне сложна в схемотехнике.
Является наиболее распространенным в данный момент среди процессорных архитектур. Характеризуется тем или иным количеством n « каналов » ( степенью ассоциативности, « п- way») и может отображать содержимое данной строки памяти на каждую из n своих строк. Этот вариант является разумным компромиссом между полностью ассоциативным и кэшем « прямого отображения ».
В современных процессорах, как правило, используется либо кэш-память с прямым отображением, либо двух- (четырех-) канальная множественно ассоциативная кэш-память. Например, в архитектурах К 7 и К 8 применяется 16- канальный частично-ассоциативный кэш L2.
Стратегия замещения информации в кэше определяет блок, подлежащий замещению при возникновении промаха. Простота при использовании кэша с прямым отображением заключается в том, что аппаратные решения здесь наиболее простые: легко реализуется сама аппаратура, легко происходит замещение данных. При замещении просто нечего выбирать - на попадание проверяется только один блок и только этот блок может быть замещен.
При полностью или частично ассоциативной организации кэш-памяти имеются несколько блоков, из которых надо выбрать кандидата в случае промаха. Как правило, для замещения блоков применяются две основные стратегии:
случайная ( Random) - блоки-кандидаты выбираются случайно (равномерное распределение). В некоторых системах используют псевдослучайный алгоритм замещения;
замещается тот блок, который не использовался дольше всех ( LRU - Least-Recently Used). В этом случае чтобы уменьшить вероятность удаления информации, которая скоро может потребоваться, все обращения к блокам фиксируются.
Достоинство случайного способа заключается в том, что его проще реализовать в аппаратуре. Когда количество блоков увеличивается, алгоритм LRU становится все более дорогим и часто только приближенным.
Алгоритмы обмена с кэш-памятью (свопинга)
включают следующие разновидности:
· алгоритм сквозной записи ( Write Through) или сквозного накопления ( Store Through);
· алгоритм простого свопинга ( Simple Swapping) или обратной записи ( Write Back);
· алгоритм свопинга с флагами ( Flag Swapping) или обратной записи в конфликтных ситуациях с флагами ( CUX);
· алгоритм регистрового свопинга с флагами ( FRS).

Алгоритм сквозной записи
Самый простой алгоритм свопинга. Каждый раз при появлении запроса на запись по некоторому адресу обновляется содержимое области по этому адресу как в быстрой, так и в основной памяти, даже если копия содержимого по этому адресу находится в быстром буфере. Такое постоянное обновление содержимого основной памяти, как и буфера, при каждом запросе на запись позволяет постоянно поддерживать информацию, находящуюся в основной памяти, в обновленном состоянии.
Поэтому, когда возникает запрос на запись по адресу, относящемуся к области, содержимое которой не находится в данный момент в быстром буфере, новая информация записывается просто на место блока, которое предполагается переслать в основную память (без необходимости пересылки этого слова в основную память), так как в основной памяти уже находится его достоверная копия.
Алгоритм простого свопинга
Обращения к основной памяти имеют место в тех случаях, когда в быстром буфере не обнаруживается нужное слово. Эта схема свопинга повышает производительность системы памяти, так как в ней обращения к основной памяти не происходят при каждом запросе на запись, что имеет место при использовании алгоритма сквозной записи. Однако в связи с тем, что содержимое основной памяти не поддерживается в постоянно обновленном состоянии, если необходимого слова в быстром буфере не обнаруживается, из буфера в основную память надо возвратить какое-либо устаревшее слово, чтобы освободить место для нового необходимого слова. Поэтому из буфера в основную память сначала пересылается какое-то слово, место которого занимает в буфере нужное слово. Таким образом, происходят две пересылки между быстрым буфером и основной памятью.
Алгоритм свопинга с флагами
Данный алгоритм является улучшением алгоритма простого свопинга. В алгоритме простого свопинга, когда в кэш-памяти не обнаруживается нужное слово, происходит два обращения к основной памяти - запись удаляемого значения из кэша и чтение нового значения в кэш. Если слово с того момента, как оно попало в буфер из основной памяти, не подвергалось изменениям, то есть по его адресу не производилась запись (оно использовалось только для чтения), то нет необходимости пересылать его обратно в основную память, потому что в ней и так имеется достоверная его копия; это обстоятельство позволяет в ряде случаев обойтись без обращений к основной памяти. Если, однако, слово подвергалось изменениям с тех пор, когда его копия была в последний раз записана обратно в основную память, то приходится перемещать его в основную память. Отслеживать изменения слова можно, пометив слово (блок) дополнительным флаг-битом. Изменяя значение флаг-бита при изменении слова, можно сформировать информацию о состоянии слова. Пересылать в основную память необходимо лишь те слова, флаги которых оказываются в установленном состоянии.
Алгоритм регистрового свопинга с флагами
Повышение эффективности алгоритма свопинга с флагами возможно за счет уменьшения эффективного времени цикла, что можно получить при введении регистра (регистров) временного хранения между кэш-памятью и основной памятью. Теперь, если данные должны быть переданы из быстрого буфера в основную память, они сначала пересылаются в регистр (регистры) временного хранения; новое слово сразу же пересылается в буфер из основной памяти, а уже потом слово, временно хранившееся в регистре, записывается в основную память. Действия в ЦП начинают опять выполняться, как только для этого возникает возможность. Алгоритм обеспечивает совмещение операций записи в основную память с обычными операциями над буфером, что обеспечивает еще большее повышение производительности.
Эксклюзивным называется кэш, в котором данные, хранящиеся в кэш-памяти первого уровня, не обязательно должны быть продублированы в кэшах нижележащих уровней. Инклюзивный кэш - когда любая информация, хранящаяся в кэшах высших уровней, дублируется в кэш-памяти.
Оперативная память (ОП) — совокупность ОЗУ, объединенных в одну систему, управляемую процессором. Для обеспечения приспосабливаемости ЭВМ к конкретным потребностям пользователей применяют принцип блочного построения 0П. Так, например, на основе блоков 03У емкостью 128 и 256 Кслов можно построить ОП любой емкости. ОП заданной емкости, составленная из нескольких блоков ОЗУ, называется многоблочной 0П.
Функциональном отношении многоблочная ОП рассматривается как одно ОЗУ с емкостью, равной сумме емкостей блоков, и быстродействием, примерно равным быстродействию отдельного блока. Адрес ячеек такой 0П содержит адрес блока и адрес ячейки памяти в заданном блоке ОЗУ.
Устройства, подключенные к 0П, обращаются к ней независимо друг от друга. Принцип обслуживания запросов к ОП - приоритетный. Устройствам присваиваются приоритеты: низший — центральному процессору, более высший — ВЗУ. ОП обслуживает очередной запрос с наивысшим приоритетом, а все остальные запросы от других устройств ожидают момента окончания обслуживания. Такой принцип обслуживания объясняется тем, что ВЗУ не могут долго ждать, так как большое время ожидания приводит к потере информации, записываемой или считываемой с непрерывно движущегося носителя. ОП, ресурсы которой распределяются между несколькими потребителями, называют 0П с многоканальным доступом.
Многоблочная ОП, в которой допускается совместное выполнение нескольких обращений к разным блокам ОЗУ называется ОП с расслоением обращений. В такой ОП блоки ОЗУ функционируют параллельно во времени, что возможно, если последующие обращения к ОП адресованы к блокам, не запятым обслуживанием предшествующих запросов. Степень расслоения обращений характеризуется коэффициентом расслоения, равным среднему числу обращений к ОП, которые могут быть приняты на обслуживание одновременно. Чем выше коэффициент расслоения, тем выше производительность.
Из микросхем, памяти ( RAM - Random Access Memory , память с произвольным доступом) используется два основных типа: статическая ( SRAM - Static RAM ) и динамическая ( DRAM - Dynamic RAM ).
Рассмотрим понятия статическая и динамическая. Назовем, упорядоченную последовательность информационных и управляющих слов образует массив. Количество ячеек памяти, используемое для представления массива в ЭВМ, называется длиной массива.
Группа ячеек памяти с последовательными номерами Аб, Аб+1, Аб+2, . , Аб+ n , представляющая массив длиной ( n +1), рассматривается как массив ячеек памяти с базовым адресом Аб (рис. 6.1).
Статическое распределение памяти основано на выделении ячеек ОП для массивов в процессе анализа и составления программы, т. е. до начала решения задачи и при выполнении программы базисные адреса сохраняют постоянные значения.
При статическом распределении ячеек памяти в массивах память используется неэффективно, так как в процессе решения задачи количество слов в массиве в большинстве случаев меньше длины массива ячеек с базовым адресом Аб. Поэтому этот способ применяют лишь в простейших системах программирования на небольших ЭВМ.

Динамическое распределение памяти основано на выделении ячеек памяти для массивов с учетом их длин в порядке их появления в процессе решения задачи. Оно используется для экономии ячеек памяти в пределах одной программы и при мультипрограммной работе ЭВМ для распределения памяти между программами.
В статической памяти элементы (ячейки) построены на различных (вариантах триггеров - схем с двумя устойчивыми состояниями. После записи бита в такую ячейку она может пребывать в этом состоянии столь угодно долго - необходимо только наличие питания. При обращении к микросхеме статической памяти на нее подается полный адрес, который при помощи внутреннего дешифратора преобразуется в сигналы выборки конкретных ячеек. Ячейки статической памяти имеют малое время, срабатывания (единицы-десятки наносекунд), однако микросхемы на их основе имеют низкую удельную плотность данных (порядка единиц Мбит на корпус) и высокое энергопотребление. Поэтому статическая память используется в основном в качестве буферной (кэш-память).
В динамической памяти ячейки построены на основе областей с накоплением зарядов, занимающих гораздо меньшую площадь, нежели T риггеры, ч практически не потребляющих энергии при хранении. При записи бита в такую ячейку в ней (формируется электрический заряд, который сохраняется в течение нескольких миллисекунд; для постоянного сохранения заряда ячейки необходимо регенерировать - перезаписывать содержимое для восстановления 'зарядов. Ячейки микросхем динамической памяти организованы в виде прямоугольной (обычно - квадратной) матрицы; при обращении к микросхеме на ее входы вначале подается адрес строки матрицы, сопровождаемый сигналом RAS ( Row Address Strobe - строб адреса строки), затем, через некоторое время - адрес столбца, сопровождаемый сигналом CAS ( Column Address Strobe - строб адреса столбца). При каждом обращении к ячейке регенерируют все ячейки выбранной строки, поэтому для полной регенерации матрицы достаточно перебрать адреса строк. Ячейки динамической памяти имеют большее время срабатывания (десятки- сотни наносекунд), но большую удельную плотность (порядка десятков Мбит на корпус) и меньшее энергопотребление. Динамическая память используется в качестве основной.
Обычные виды SRAM и DRAM называют также асинхронными, потому что установка адреса, подача управляющих сигналов и чтение/запись данных могут выполняться в произвольные моменты времени - необходимо только соблюдение временных соотношений между этими сигналами. В эти временные соотношения включены так называемые охранные интервалы, необходимые для стабилизации сигналов, которые не позволяют достичь теоретически возможного быстродействия памяти. Существуют также синхронные виды памяти, получающие внешний синхросигнал, к импульсам которого жестко привязаны моменты подачи адресов и обмена данными; помимо экономии времени на охранных интервалах, они позволяют более полно использовать внутреннюю конвейеризацию и блочный доступ.
FPM DRAM ( Fast Page Mode DRAM - динамическая память с быстрым страничным доступом) активно используется в последние несколько лет. Память со страничным доступом отличается от обычной динамической памяти тем, что после выбора строки матрицы и удержании RAS допускает многократную установку адреса столбца, стробируемого CAS , и также быструю регенерацию по схем.е " CAS прежде RAS ". Первое позволяет ускорить блочные передачи, когда весь блок данных или его часть находятся внутри одной строки матрицы, называемой в этой системе страницей, а второе - снизить накладные расходы на регенерагщю памяти.
ED 0 ( Entended Data Out - расширенное время удержания данных на выходе) фактически представляют собой обычные микросхемы F РМ, на выходе которых установлены регистры-защелки данных. При страничном обмене такие микросхемы работают в режиме простого конвейера: удерживают на выходах данных содержимое последней выбранной ячейки, в то время как на их входы уже подается адрес следующей выбираемой ячейки. Это позволяет примерно на 15% по сравнению с FPM ускорить процесс считывания последовательных массивов данных. При случайной адресации такая память ничем не отличается от обычной.
BEDO ( Burst EDO - EDO с блочным доступом) - память на основе EDO , работающая не одиночными, а пакетными циклами чтения/записи. Современные процессоры, благодаря внутреннему и внешнему кэшированию команд и данных, обмениваются с основной памятью преимущественно блоками слов максимальной ширины. В случае памяти BEDO отпадает необходимость постоянной подачи последовательных адресов на входы микросхем с соблюдением необходимых временных задержек - достаточно стробировать переход к очередному слову отдельным сигналом.
SDRAM ( Synchronous DRAM - синхронная динамическая память) -память с синхронным доступом, работающая быстрее обычной асинхронной ( EPM / EDO / BEDO ). Помимо синхронного метода доступа, SDRAM использует внутреннее разделение массива памяти на два независимых банка, что позволяет совмещать выборку из одного банка с установкой адреса в другом банке. SDRAM также поддерживает блочный обмен. Основная выгода от использования SDRAM состоит в поддержке последовательного доступа в синхронном режиме, где не требуется дополнительных тактов ожидания. При случайном доступе SDRAM работает практически с той же скоростью, что и FPM / EDO .
PB SRAM ( Pipelined Burst SRAM - статическая память с блочным конвейерным, доступом) - разновидность синхронных SRAM с внутренней конвейеризацией, за счет которой примерно вдвое повышается скорость обмена опоками данных.
Микросхемы памяти имеют четыре основные характеристики - тип, объем, структуру и время доступа. Тип обозначает статическую или динамическую память, объем показывает общую емкость микросхемы, а структура - количество ячеек памяти и разрядность каждой ячейки. Например, 28/32- выводные DIP - микросхемы SRAM имеют восьмиразрядную структуру (8 k *8, 16 k *8, 32 k *8, 64 k *8, 128 k *8), и кэш для 486 объемом 256 кб будет состоять из восьми микросхем 32 k * S или четырех микросхем 64 k *8 (речь идет об области данных дополнительные микросхемы для хранения признаков ( tag ) могут иметь другую структуру). Две микросхемы по 128 k *8 поставить уже нельзя, так как нужна 32- разрядная шина данных, что могут дать только четыре параллельных микросхемы. Распространенные Р B SRAM в 100-выводных корпусах PQFP имеют 32-разрядную структуру 32 k *32 или 64 k *32 и используются по две или по четыре в платах для Pentuim .
Время доступа характеризует скорость работы микросхемы и обычно указывается в наносекундах через тире в конце наименования. На более медленных динамических микросхемах могут указываться только первые цифры (-7 вместо -70, -15 вместо -150), на более быстрых статических "-15" или "-20" обозначают реальное время доступа к ячейке. Часто на микросхемах указывается минимальное из всех возможных времен доступа - например, распространена маркировка 70 нс EDO DRAM , как 50, или 60 нс - как 45, хотя такой цикл достижим только в блочном. режиме, а в одиночном режиме микросхема по-прежнему срабатывает за 70 или 60 не. Аналогичная ситуация имеет место в маркировке РВ SRAM : 6 нс вместо 12, и 7 - вместо 15. Микросхемы SDRAM обычно маркируются временем доступа в блочном режиме (10 или 12 нс).
Тип модуля памяти DIP ( Dual In line Package - корпус с двумя рядами выводов) - классические микросхемы, применявшиеся в блоках основной памяти XT и ранних AT , a сейчас - в блоках кэш-памяти. SIP ( Single In line Package - корпус с одним рядом выводов) - микросхема с одним рядом выводов, устанавливаемая вертикально. SIPP ( Single In line Pinned Package - модуль с одним рядом проволочных выводов) - модуль памяти, вставляемый в панель наподобие микросхем DIP / SIP ; применялся в ранних А Т.
SIMM ( Single In line Memory Module - модуль памяти с одним рядом контактов) - модуль памяти, вставляемый в зажимающий разъем; применяется во всех современных платах, а также во многих адаптерах, принтерах и прочих устройствах. SIMM имеет контакты с двух сторон модуля, но все они соединены между собой, образуя как бы один ряд контактов.
DIMM ( Dual In line Memory Module - модуль памяти с двумя рядами контактов) - модуль памяти, похожий на SIMM , но с раздельными контактами (обычно 2 х 84), за счет чего увеличивается разрядность или число банков памяти в модуле. Применяется в основном в компьютерах Apple ч новых платах Р5 и Р6.
На SIMM в настоящее время устанавливаются преимущественно микросхемы FPM / EDO / BEDO , а на DIMM - EDO / BEDO / SDRAM .
С ELP ( Card Egde Low Profile - невысокая карта с ножевым разъемом на краю) - модуль внешней кэш-памяти, собранный на микросхемах SRAM (асинхронный) или РВ SRAM (синхронный). По внешнему виду похож на 72-контактный SIMM , имеет емкость 256 или 512 кб. Другое название - COAST ( Cache On A Stick - буквально "кэш на палочке").
Модули динамической памяти, помимо памяти для данных, могут. иметь дополнительную память для хранения битов четности ( Parity ) для байтов данных - такие SIMM иногда называют 9- и 36- разрядными модулями (по одному биту четности на байт данных). Биты четности служат ()л.я контроля правильности считывания данных из модуля, позволяя обнаружить часть ошибок (но не все ошибки). Модули с четностью имеет смысл применять лишь там, где нуж,на очень высокая надежность - для обычных применений подходят и тщательно проверенные модули без четности, при условии, что системная плата поддерживает такие типы модулей.
Проще всего определить тип модуля по маркировке и количеству микросхем памяти на нем: например, если на 30-контактном SIMM две микросхемы одного типа и одна - другого, то две первых содержат (данные (каждая - по четыре разряда), а третья - биты четности (она одноразрядная). В 72- контактном SIMM с двенадцатью микросхемами восемь из них хранят данные, а четыре - биты четности. Модули с количеством микросхем 2, 4 или 8 не имеют памяти под четность.
Иногда на модули ставится так называемый имитатор четности -микросхема- сумматор, выдающая при считывании ячейки всегда правильный бит четности. В основном это предназначено для установки таких модулей в платы, где проверка четности не отключается; однако, cy щ ecm в y ю m модули, где такой сумматор маркирован как "честная" микросхема памяти.
72-контактные SIMM имеют четыре специальных линии PD ( Presence Deled - обнаружение наличия), на которых при помощи перемычек может быть установлено до 16 комбинаций сигналов. Линии PD используются некоторыми " Brand name "- платами для определения наличия модулей в разъемах и их параметров (объеми и быстродействия). Большинство универсальных плат производства "третьих фирм", как их выпускаемые ими SIMM , не используют линий PD .
Читайте также: