
Какие устройства могут являться составной частью машин с компьютерным управлением движением
Внешней средой для мехатронных машин является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Внешние среды укрупненно можно разделить на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой для проектирования МС степенью адекватности. Некоторые среды являются недетерминированными по своей природе (например, экстремальные среды: подводные, подземные и т. п.). Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для оценки сил резания при механообработке проводят серии экспериментов на специальных исследовательских установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и компьютерных моделей возмущающих воздействий на основе экспериментальных данных.
Однако для организации и проведения подобных исследований зачастую требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так, для предварительной оценки силовых воздействий на рабочий орган при операции роботизированного удаления облоя с литых изделий необходимо измерять фактические форму и размеры каждой заготовки. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения МС непосредственно в ходе выполнения операции.
В состав традиционной машины входят следующие основные компоненты:
- механическое устройство, конечным звеном которого является рабочий орган;
- блок приводов, включающий силовые преобразователи и исполнительные двигатели;
- устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть;
- сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении МС.
Таким образом, наличие трех обязательных частей – механической (точнее электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком, отличающим мехатронные системы.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (например, тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа.
Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления (УКУ). В состав УКУ мехатронной системы обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции.
I. Управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации.
ΙΙ. Организация управления функциональными движениями МС, которая предполагает координацию управления механическим движением МС и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства.
ΙΙΙ. Взаимодействие с человеком-оператором через человеко-машинный интерфейс в режимах программирования и непосредственно в процессе движения МС.
IV. Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование информации о цели управления, поступающей с верхнего уровня, в целенаправленное функциональное движение системы с управлением на основе принципа обратной связи. Блок-схема, иллюстрирующая ход энергетических и информационных потоков в МС, приведена на рисунке 1.
Характерно, что электрическая энергия используется в современных системах как промежуточная энергетическая форма. Таким образом, для физической реализации мехатронной системы теоретически необходимы четыре основных функциональных блока: последовательно соединенные информационно-электрический и электромеханический энергетические преобразователи в прямой цепи и электро-информационный и механико-информационный преобразователи в цепи обратной связи.
Понятно, что если работа силовой части машины с энергетической точки зрения основана на гидравлических, пневматических или комбинированных (например, электрогидравлических) процессах, то, необходимы соответствующие преобразователи и датчики в цепи обратной связи.

Проанализируем физический характер преобразований и структуру традиционной машины с компьютерным управлением (рис. 2).

Рис. 2. Блок-схема традиционной машины с компьютерным управлением
(И1 – И7: интерфейсные блоки)
Устройство компьютерного управления на основании входной информации, поступающей с верхнего уровня управления и по цепям обратной связи от сенсоров, выдает во времени на исполнительные приводы управляющие электрические сигналы. В силовых преобразователях происходит усиление по мощности данных сигналов, их модуляция (наиболее широко применяются широтно-импульсные модуляторы). Затем исполнительные приводы прикладывают соответствующие усилия (силы и моменты сил) к звеньям механического устройства, что в результате вызывает целенаправленное движение конечного звена машины – ее рабочего органа.
Для сопряжения элементов в систему традиционно вводят специальные интерфейсные устройства, которые на рисунке 2 обозначены И1-И7.
Рассмотрим примеры межблоковых интерфейсов, которые наиболее часто встречаются в машинах с компьютерным управлением (станках с ЧПУ, промышленных роботах и т. п.), широко применяемых в автоматизированном машиностроении.
Интерфейс И1 представляет собой комплекс сетевых аппаратно-программных средств для сопряжения устройства компьютерного управления с компьютерной сетью, либо это интерфейс человек – машина, если цель управления мехатронной системе задается непосредственно человеком-оператором. Современные человеко-машинные интерфейсы выполняются в виде пультов и рукояток дистанционного управления (например, для программирования промышленных роботов методом обучения), периферийных устройств компьютеров (клавиатура, монитор, джойстик), устройств отображения информации в системах виртуальной реальности (перчатки, шлемы со встроенными окулярами и др.).
Интерфейс И2 обычно состоит из цифро-аналогового преобразователя и усилительно-преобразующего устройства и служит для формирования управляющих электрических напряжений для исполнительных приводов.
Интерфейс И4 на входе устройства компьютерного управления в случае применения в МС сенсоров с аналоговым выходным сигналом строится на основе аналого-цифровых преобразователей.
Интерфейс ИЗ представляет собой, как правило, механические передачи, связывающие исполнительные двигатели со звеньями механического устройства. Конструктивно такие трансмиссии обычно включают редукторы, муфты, гибкие связи, тормоза и т. п.
Интерфейсы сенсоров И5, И6 и И7 в зависимости от физического характера входных переменных состояния системы можно разделить на электрические и механические. К механическим относятся присоединительные устройства для датчиков обратной связи приводов (фотоимпульсных, кодовых, тахогенераторов, потенциометров, резольверов), силомоментных и тактильных датчиков, а также других средств очувствления и информации о движении двигателей, звеньев механического устройства и внешних объектов. Преобразование и передача сигналов о переменных состояния системы, которые имеют электрическую природу (например, напряжения и токи в силовых преобразователях) осуществляется электрическими интерфейсами. В их состав помимо усилительно-преобразующих плат входят также соединительные кабели и коммутационная аппаратура.
Важно отметить, что связь всех элементов с устройством компьютерного управления предусматривает не только аппаратное сопряжение, но также и соответствующее программное обеспечение (операционную систему и драйверы) для организации обмена данными в режиме реального времени.
Принципиальное различие мехатронного и традиционного подходов к проектированию и изготовлению модулей и машин с компьютерным управлением состоит в концепции технической реализации функциональных преобразователей. При традиционном проектировании интерфейсы представляют собой отдельные самостоятельные устройства и узлы. Обычно это сепаратные блоки, которые выпускаются специализированными фирмами, но зачастую отдельные элементы приходится изготавливать самим пользователям, особенно при сопряжении специализированных и нестандартных блоков МС. Производственная практика показала, что для монтажа и запуска сложных комплексов (например, гибких производственных систем) предприятия, которые, как правило, не имеют своих высококвалифицированных специалистов по системной интеграции, вынуждены обращаться к инжиниринговым фирмам, тем самым увеличивая свои затраты.
Сравнивая блок-схемы, представленные на рисунке 1 и 2, можно прийти к выводу о том, что количество преобразующих (в том числе интерфейсных) блоков в традиционной структуре машины с компьютерным управлением избыточно по отношению к минимально необходимому числу информационно-энергетических функциональных преобразований. Наличие избыточных блоков приводит к снижению надежности и точности мехатронной системы, ухудшению ее массогабаритных и стоимостных показателей.
Идея минимизации промежуточных преобразований широко используется в инженерной практике при проектировании устройств и систем самого различного назначения. Характерным примером реализации этой инженерной идеи в бытовой технике является так называемая «видеодвойка» – моноблок, в состав которого входят телевизор и видеомагнитофон. Чем же руководствуются покупатели, отдавая в магазине предпочтение видеодвойке по сравнению с покупкой раздельно ТВ и видеомагнитофона? Во-первых, безусловно, ощутимый выигрыш в стоимости. Во-вторых, не надо разбираться с подключением кабелей и разъемов, а затем регулярно следить за надежностью этих соединений.
В-третьих, имеют значение преимущество в габаритах, общий корпус, удобство установки. Но при этом покупатель должен четко отдавать себе отчет в том, что видеодвойка – система негибкая, оба устройства могут эксплуатироваться и при необходимости ремонтироваться только совместно.
Суть мехатронного подхода к проектированию состоит в интеграции в единый функциональный модуль двух или более элементов различной физической природы. Другими словами, на стадии проектирования из традиционной структуры машины исключается как сепаратное устройство, по крайней мере, один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем. В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, должен исполнить с заданными показателями качества программное функциональное движение.
Сущность мехатронного подхода состоит в том, что он направлен на интеграцию конкретного класса элементов (механических, электронных, компьютерных, электротехнических, интерфейсных и др.), которые имеют принципиально различную физическую природу и предназначены для реализации сложного функционального движения. Аппаратное объединение элементов в единые конструктивные модули должно обязательно сопровождаться разработкой интегрированного программного обеспечения. Программные средства МС должны обеспечивать непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени. Таким образом, проектирование МС предполагает разработку комплекса аппаратно-программных средств, ориентированных на конкретные прикладные задачи.
Для реализации сформулированного мехатронного подхода следует определить локальные точки интеграции элементов в единый функциональный модуль. Для этого вернемся к рассмотрению блок-схемы на рисунке 1. Потенциально возможные точки аппаратной интеграции и структуры соответствующих мехатронных модулей представлены в таблице 1.

В таблице 1 мехатронные модули классифицированы по набору вошедших в их состав базового и дополняющих элементов (столбцы 1 и 2). В третьем столбце указаны интерфейсы, которые при проектировании исключаются как сепаратные блоки из традиционной структуры (рис. 2). В таблице не рассматриваются интерфейсы И1 и И7, которые являются по сути входными для мехатронного модуля, так как связывают его с источниками внешних сигналов и воздействий. Особенности построения интерфейсов И1, И2, И4 для устройства компьютерного управления подробно рассмотрены в следующей главе.
На практике целесообразно строить мехатронный модуль, опираясь сразу на несколько точек интеграции, и создание именно таких модулей представляет наибольший интерес с теоретической и прикладной точек зрения для мехатроники как новой области науки и техники. Таблица не исчерпывает всех возможных способов объединения элементов в МС и оставляет большое поле для научного поиска и инженерного творчества.
11594 Запоминающие устройства: классификация, принцип работы, основные характеристики. Системная память: ОЗУ, ПЗУ, кэш. Внешняя память: винчестер; стример; накопитель на гибких магнитных дисках; накопители на компакт-дисках
В состав внутренней памяти современного компьютера НЕ входит…
накопители на магнитных дисках
Для временного хранения информации используется
оперативная память (ОЗУ)
Невозможно случайно стереть информацию на …
Устройством для резервного копирования больших объемов информации является
КЭШ-память является
дополнительным хранилищем копий блоков информации
действующим хранилищем копий блоков основной памяти
хранилищем блоков информации основной памяти
хранилищем для медленного хранения копий
Дисковая память является…
памятью прямого доступа
памятью последовательного доступа
памятью произвольного доступа
КЭШ-память компьютеров:
значительно увеличивает емкость оперативной памяти
повышает быстродействие компьютеров
замедляет обслуживание компьютера
Устройством, в котором хранение данных возможно только при включенном питании компьютера, является…
оперативная память (ОЗУ)
постоянная память (ПЗУ)
гибкий магнитный диск
Минимальной адресуемой ячейкой оперативной памяти является
Имеет механические части и поэтому работает достаточно медленно ________ память
Укажите, какие запоминающие устройства из предложенного списка относятся к внутренней памяти
а) жесткие магнитные диск
б) оперативная память
в) постоянная память
г) гибкие магнитные диски
д) кэш-память
Укажите, какие устройства из предложенного списка являются устройствами памяти
а) жесткий диск
Укажите, какие устройства из предложенного списка являются устройствами памяти
Внешняя память компьютера предназначена …
для долговременного хранения данных и программ
для долговременного хранения только данных, но не программ
для долговременного хранения только программ, но не данных для кратковременного
хранения обрабатываемой в данный момент информации
Компакт-диск (CD) – это …
оптический диск, информациия с которого считывается лазерным лучом
магнитный диск с высокой плотностью записи информации
диск после выполнения операции сжатия информации
сменный магнитный диск малого размера
Процедурой исправления ошибок, используемой для защиты данных в памяти компьютера, является …
При отключении компьютера данные не сохраняются …
в оперативной памяти (ОЗУ)
в постоянной памяти (ПЗУ)
на жестком диске (винчестере)
Принцип записи данных на гибкий магнитный диск заключается в
намагничивании поверхности диска
прожигании рабочего слоя диска лазером
просвечивании лазером поверхности диска
ядерно-магнитном резонансе рабочего слоя компьютера
11595 Устройства ввода/вывода данных, данных, их разновидности и основные характеристики. Клавиатура. Координатные устройства ввода. Видео- и звуковые адаптеры. Назначение, разновидности и основные характеристики. Сканеры. Принтеры. Плоттеры. Мониторы
Модем – это устройство…
для связи компьютера с сетью через телефонные линии связи
для связи компьютера с сетью напрямую с помощью электрического кабеля
для связи компьютера со сканером
Разрешение принтера – это
число точек, которое различают на линии длиной в один дюйм
максимальный размер печатного листа
число цветов, используемых для печати
число листов, которое принтер печатает за минуту
Мышь может быть…
Сканер используется для …
ввода текстовой и графической информации в компьютер
печати текстовой и графической информации
вывода цветных картинок на бумагу
Джойстик в первую очередь используется как
манипулятор в игровых приставках
устройство для ввода буквенно-символьной информации
устройство для управления сетевыми ресурсами
основной манипулятор при работе в Интернет
Выберите устройство ввода
Принтеры классифицируют по типу
механизм выполнения печати
механизм считывания изображения
алгоритм формирования изображения
НЕ существует мониторов _________ типа
Устройством ручного ввода графических данных, выполненное в виде рукоятки, связанной с датчиками напряжения, является…
Кнопки, используемые для выдачи сигналов, обеспечивающих тот или иной вид обработки участка изображения или текста на экране, располагаются на поверхности
Укажите, какие устройства из предложенного списка являются устройствами вывода данных:
б) процессор
в) блок питания
Укажите, какие устройства из предложенного списка являются устройствами вывода данных:
а) привод CD-ROM
б) жесткий диск
д) лазерный принтер
Укажите, какие устройства из предложенного списка являются устройствами ввода данных:
а) жесткий диск
д) привод CD-ROM
Укажите, какие устройства из предложенного списка являются устройствами ввода данных:
д) привод CD-ROM
Один из физических каналов ввода/вывода компьютера, разъем – называется…
Методологической основой разработки мехатронных систем служат методы параллельного проектирования (concurrent engineering methods). При традиционном проектировании машин с компьютерным управлением последовательно проводится разработка механической, электронной, сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков.
Парадигма параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонент системы.
На рис.1. представлена обобщенная структура машин с компьютерным управлением (автоматических роботов), используемых в машиностроении. Данная схема позволяет показать принципы построения мехатронных систем.
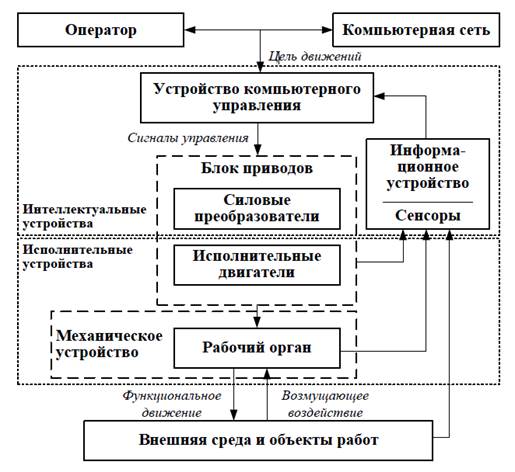
Рис. 1. Обобщенная схема машины с компьютерным управлением движением
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит основное и вспомогательное оборудование, технологическую оснастку и объекты работ.
При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Внешние среды делят на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью для проектирования мехатронных систем. Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для определения сил резания при механообработке проводятся экспериментальные исследования на специальных установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и/или компьютерных моделей возмущающих воздействий.
Однако для проведения таких исследований, как правило, требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган на операции роботизированного удаления облоя с отливок необходимо контролировать их форму и размеры. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения рабочих органов мехатронных систем непосредственно в ходе выполнения операции.
В состав традиционной машины входят следующие основные компоненты: механическое устройство (конечное звено - рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении мехатронной системы.
Таким образом, наличие трех обязательных частей – механической (электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком мехатронных систем.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления. В состав этого устройства обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции:
• управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации;
• организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами.
• взаимодействие с оператором через интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения мехатронной системы (on-line).
• организация обмена данными с периферийными устройства-ми, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи.
Характерно, что электрическая энергия (реже гидравлическая или пневматическая) используется в современных системах как промежуточная энергетическая форма.
Особенность мехатронного подхода к проектированию заключается в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы. Соответственно на стадии проектирования из традиционной структуры машины исключается как минимум один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем.
В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять заданное функциональное движение с допустимой погрешностью. Аппаратное объединение элементов в единые конструктивные модули обязательно сопровождают разработкой интегрированного программного обеспечения.
Программные средства обеспечивают непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени.
Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
• относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации элементов и интерфейсов;
• высокую точность сложных движений вследствие применения методов интеллектуального управления;
• высокую надежность, долговечность и помехозащищенность;
• конструктивную компактность модулей (вплоть до миниатюризации в микромашинах);
• улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
• возможность комплексирования функциональных модулей в сложные системы и комплексы под конкретные задачи заказчика.
План работы
Проанализировать с труктура мехатронного модуля и мехатронной системы

Рис.2. Структура мехатронной системы
Контрольные вопросы
1. Дайте определение термина «мехатроника».
2. Что такое мехатронный объект?
3. Каким мехатронным уровням может соответствовать технический объект? Приведите примеры.
4. Что такое «устройство»?
5. Мехатронность технических объектов, что это такое?
5. Какие основные принципы положены в основу построения мехатронных систем?
6. Какие устройства могут являться составной частью машин с компьютерным управлением движением?
7. Какие функции выполняет устройство компьютерного управления в мехатронной системе или модуле?
8. Объясните суть мехатронного подхода к проектированию.
9. Какие основные преимущества мехатронного подхода при создании машин с компьютерным управлением по сравнению с традиционными средствами автоматизации?
1. Подураев Ю.В. Мехатроника: основы, методы, применение [Текст]: учеб. пособие для вузов Серия: Для вузов/ М.: Машиностроение, 2006. – 256 с.
2. Юревич Е. И. Основы робототехники [Текст]: учеб. пособие для вузов / Юревич Е. И.; 2-е изд. - СПБ.: БХВ-Петербург,2005. - 416 с.
3. Шошиашвили М.Э., Шошиашвили И.С. Механика управляемых машин и мехатронных систем [Электронный ресурс]: учебное пособие [для вузов]. 2-е изд., доп. Юж.-Рос. гос. техн. ун-т (НПИ) – Новочеркасск: ЮРГТУ (НПИ), 2012. – 188 с.
4. Элементы мехатроники [Текст]: учеб. пособие/ Глебов Н.А., Булгаков А. Г., Гераськин Д. П.; Юж.-Рос. гос. техн. ун-т (НПИ). - Новочеркасск: Изд-во ЮРГТУ(НПИ), 2006. – 128 с.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.017)
Мехатронные устройства – это выделившийся в последние десятилетия класс машин, или узлов этих машин, базирующийся на использовании в них точной механики, электропривода, электроники, компьютерного управления.
Мехатронная система – множество механических, процессорных, электронных и электротехнических компонентов, находящихся в связях друг с другом, образующих определенную целостность, единство.
Мехатронный объект – предмет (изделие), представляющий собой машину с компьютерным управлением как мехатронную систему устройств, самостоятельно функционирующую в соответствии с целевым назначением.
Мехатронный модуль – мехатронный узел (устройство), состоящее из интегрированного сочетания нескольких элементов, оформленный конструктивно как самостоятельное изделие и выполняющий определенную функцию в различных мехатронных объектах.
Исполнительный орган – функциональная часть мехатронного устройства, предназначенная для выполнения действий по сигналам от системы управления.
Рабочий орган – устройство, предназначенное для реализации технологического назначения объекта.
Мехатронный комплекс – совокупность связанных между собой мехатронных объектов, предназначенная для осуществления действий, определяемых общим целевым назначением.
Рассмотрим пример перехода от ручного к автоматическому регулированию, т.е. замещения работы человека-оператора автоматизированной системой управления.
На рисунке 1 представлен технологический объект — сушильный шкаф, в котором должна поддерживаться постоянная температура , которая измеряется измерительным прибором ИП в комплекте с электронным термометром (путем изменения сопротивления Rт).


Рис. 1. Система ручного регулирования температуры.
Сушильный шкаф имеет электрический нагревательный элемент Н, питающийся от автотрансформатора AT. При отклонении температуры от заданного значения, например при увеличении (падении) напряжения Uс в питающей сети, человек-оператор перемещает движок автотрансформатора в направлении изменения напряжения U, соответствующем восстановлению заданного значения температуры.
Выходом системы является значение температуры в сушильном шкафу.
Выход системы ручного регулирования по воздействию связан с ее входом через оператора (пунктир).
Так осуществляется ручное (регулирование объектом — температуры сушильного шкафа.
В автоматической системе регулирования (рис. 2) функции управления вместо человека-оператора осуществляет регулирующее устройство РУ, состоящее из измерительного моста ИМ, электронного усилителя ЭУ и электродвигателя М.


Рис.2. Принципиальная и блок-схема автоматической системы регулирования (температуры).
Температура в сушильном шкафу измеряется термометром сопротивления Rт, включенным в одно из плеч измерительного моста ИМ. При заданном значении температуры измерительный мост уравновешен, на вход электронного усилителя ЭУ напряжение не подается. При отклонении температуры от заданного значения соответственно изменяется сопротивление Rт , что вызывает разбаланс измерительного моста ИМ. На электронный усилитель ЭУ подается напряжение разбаланса, и электродвигатель М начинает вращаться, перемещая движок автотрансформатора AT в сторону ликвидации отклонения температуры шкафа от заданного значения. При достижении заданного значения температуры измерительный мост ИМ балансируется, двигатель М останавливается и система приходит в равновесное состояние. Заданное значение температуры устанавливается путем перемещения оператором движка потенциометра Rз. Потенциометр R служит для коррекции равновесия ИМ при значении температуры в сушильном шкафу, равном заданному.
Комплекс технических средств (устройств), присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение ее по заданному закону, называют автоматическим регулятором.
Таким образом, основными компонентами мехатронной системы являются механизм и автоматическая система управления, содержащая, как правило, микроЭВМ или комплекс микропроцессоров, а также сенсорные устройства (средства очувствления), причем механизм системы движется по определенной программе с помощью управляемых приводов (рис. 3).
Рис. 3. Схема промышленной мехатронной системы
В последнее время все чаще возникает потребность в создании технических систем и устройств, обладающих наряду с высокими техническими характеристиками способностью к «интеллектуализации» своей функциональной деятельности. Развитие современных средств микроэлектроники позволило сократить размеры и массу электронных элементов, способных выполнять сложные логические и усилительные операции. Интегральное их исполнение повышает надежность функционирования оборудования в условиях эксплуатации.
Мехатронное устройство обладает следующими характерными признаками:
- Наличие: выходного механического звена (ВМЗ), выполняющего внешние функции мехатронного устройства; силового электромеханического привода выходного звена; устройства программного управления приводом; информационной системы, контролирующей состояние окружающей среды и состояние самого мехатронного устройства.
- Минимум преобразований информации и энергии (например, использование высокомоментных или линейных двигателей без редукторов) – принцип минимума преобразований.
- Использование одного и того же элемента мехатронного устройства для реализации нескольких функций – принцип совмещения функций.
- Объединение корпусов мехатронного устройства – принцип совмещения корпусов.
- Применение сверхплотного монтажа элементов.
Примерами современных мехатронных устройств являются модули станков и промышленных роботов, устройства внешней памяти компьютеров, принтеры, бытовая техника и т. п. Мехатронное устройство может быть либо машиной, либо узлом (функциональный элемент, модуль) машины.
Мехатронный узел включает в себя:
– механизм, состоящий из корпуса, привода и выходного механического звена. Последнее может включать силовой элемент, механическую передачу движения, рабочий орган или другой оконечный элемент ВМЗ;
– усилитель мощности силового элемента;
– устройство управления усилителем мощности;
– внутреннюю информационную систему (датчики состояния самого мехатронного узла, средства обработки информации с датчиков);
– внешнюю информационную систему (сенсоры информации о внешней среде мехатронного узла, средства обработки этой информации);
– устройство управления мехатронным узлом.
Важно, что с момента своего появления, идеи мехатроники оказывают значительное влияние на само производство. Первые промышленные мехатронные системы работали по так называемой жесткой программе. По мере развития в мехатронике начинают применяться различные встроенные микропроцессорные устройства. В результате создаются перепрограммируемые промышленные мехатронные системы и системы с обратной связью. В механообрабатывающих отраслях появляются станки с числовым программным управлением (ЧПУ), работающие по программам, предварительно полученным с помощью ЭВМ. Вслед за станками ЧПУ создаются первые крупные гибкие производственные системы (ГПС), способные в короткие сроки перестраиваться с выпуска продукции одного вида на выпуск продукции другого вида. Современные мехатронные системы работают по гибкой программе и способны автономно выполнять большое количество операций, причем выбор необходимой рабочей программы осуществляется автоматически с помощью встроенных микропроцессоров.
Направления развития (становления) мехатронных систем можно проследить с разных позиций. Например, одним из таких признаков является уровень интеграции (синергетического объединения) элементов, к числу которых относятся элементы механических, электромеханических, электронных и компьютерных (информационных) модулей (рис. 1).
Синергия - это совместное действие, направленное на достижение единой цели.
Модуль - это унифицированная функциональная часть машины, конструктивно оформленная как самостоятельное изделие
Мехатронные модули – это базовые функциональные компоненты мехатронных систем и машин с компьютерным управлением, предназначенные для выполнения движений, как правило, по одной управляемой координате.
Такие модули могут объединять в одном корпусе несколько компонентов, например, двигатель, редуктор и датчики.

Рисунок 1 – Составные части мехатроники
Качественно новые свойства мехатронных модулей по сравнению с традиционными приводами достигаются синергетической интеграцией составляющих элементов.
Синергетическое объединение предполагает не простое соединение частей посредством интерфейсных блоков, но их конструктивное встраивание в мехатронные модули. Синергетическая интеграция элементов при проектировании мехатронных модулей основана на трех базовых принципах (функционально-структурный подход к проектированию МС):
- реализация заданных функциональных преобразований минимально возможным числом структурных и конструктивных блоков путем объединения двух и более элементов в единые многофункциональные модули;
- выбор интерфейсов в качестве локальных точек интеграции и исключение избыточных структурных блоков и интерфейсов как сепаратных элементов;
- перераспределение функциональной нагрузки в мехатронной системе от аппаратных блоков к интеллектуальным (электронным и компьютерным) компонентам.
В соответствии с признаком синергетического объединения можно исторически разделить мехатронные модули по уровням (определяющим ведущую тенденцию в современном машиностроении «от механики к мехатронике»).
Мехатронные модули первого уровня представляют собой объединение только двух исходных элементов. Типичным примером модуля первого поколения может служить «мотор-редуктор», где механический редуктор и управляемый двигатель выпускаются как единый функциональный элемент. Мехатронные системы на основе этих модулей нашли широкое применение при создании различных средств комплексной автоматизации производства (конвейеров, транспортеров, поворотных столов, вспомогательных манипуляторов).
Мехатронные модули второго уровня появились в 80-х годах в связи с развитием новых электронных технологий, которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов. Объединение приводных модулей с указанными элементами привело к появлению мехатронных модулей движения, состав которых полностью соответствует введенному выше определению, когда достигнута интеграция трех устройств различной физической природы: механических, электротехнических и электронных. На базе мехатронных модулей данного класса созданы управляемые энергетические машины (турбины и генераторы), станки и промышленные роботы с числовым программным управлением.
Развитие третьего поколения мехатронных систем обусловлено появлением на рынке сравнительно недорогих микропроцессоров и контроллеров на их базе и направлено на интеллектуализацию всех процессов, протекающих в мехатронной системе, в первую очередь - процесса управления функциональными движениями машин и агрегатов.
Одновременно идет разработка новых принципов и технологий изготовления высокоточных и компактных механических узлов, а также новых типов электродвигателей (в первую очередь высокомоментных, бесколлекторных и линейных), датчиков обратной связи и информации. Синтез новых прецизионных, информационных и измерительных наукоемких технологий дает основу для проектирования и производства интеллектуальных мехатрон-ных модулей и систем.
В дальнейшем мехатронные машины и системы будут объединяться в мехатронные комплексы на базе единых интеграционных платформ. Цель создания таких комплексов - добиться сочетания высокой производительности и одновременно гибкости технико-технологической среды за счет возможности ее реконфигурации, что позволит обеспечить конкурентоспособность и высокое качество выпускаемой продукции на рынках XXI века.
Наряду с синергетическим объединением (интеграцией) элементов мехатронных систем другими квалификационными признаками развития мехатронных систем, по-видимому, следует признать их интеллектуализацию и миниатюризацию.
В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну. При этом доля компьютерной части возросла за последнее 10-летие вдвое, и есть все основания прогнозировать сохранение этой тенденции в технике будущего.
Принципиально важно подчеркнуть, что тенденция перехода от механических к мехатронным технологиям в современном машиностроении не «закрывает» механику. Наоборот, это стимулирует ее развитие к интеграции с интеллектуальными компонентами в рамках единой мехатронной системы.
Системный подход диктует новые требования к встроенным механическим и гибридным компонентам, что в свою очередь ведет к развитию новых технологий и конструкторских решений в области механики.

Рис. 2 Динамика изменения составляющих "Механика - электроника - информатика"
На рис. 2 представлен характерный график (по данным журнала, выпущенного специально к Всемирной выставке «Промышленность, автоматизация и инновации» 2000 г.), который отражает динамику этого процесса в производственных машинах за 30 лет, начиная с 70-х годов. Анализ показывает, что еще в начале 90-х годов подавляющее большинство функций машины (более 70 %) реализовывалось механическим путем. В последующие десятилетия происходило постепенное вытеснение механических узлов - сначала электронными, а затем и компьютерными блоками. В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну. При этом доля компьютерной части возросла за последнее 10-летие вдвое, и есть все основания прогнозировать сохранение этой тенденции в технике будущего.
Интеллектуальные системы управления - основа интеллектуального управления сложными динамическими объектами (мехатронными системами). Они априорно ориентированы на работу в условиях неполноты или нечеткости исходной информации, неопределенности внешних возмущений и среды функционирования, требуют привлечения нетрадиционных подходов к управлению с использованием специальных методов и технологий искусственного интеллекта совершенно нового класса. К числу таких технологий можно отнести информационные технологии на основе экспертных систем, нейросетевых структур, ассоциативной памяти, нечеткой логики.
Термин «искусственный интеллект - ИИ» (AI - artificial intelligence)., был предложен в 1956 г. на семинаре с аналогичным названием в Дартсмутском колледже (США). Семинар был посвящен разработке методов решения логистических, а не вычислительных задач. В английском языке данное словосочетание не имеет той слегка фантастической антропоморфной окраски, какую оно приобрело в довольно неудачном русском переводе. Слово intelligence означает умение рассуждать разумно, а вовсе не "интеллект", для которого есть термин intellect.
С течением времени развитие таких разделов искусственного интеллекта как инженерия знаний, компьютерная логика и лингвистика, методы и модели обучения, методы поиска и принятия решений и др. заложило теоретическую основу для создания высокоэффективных систем по обработке и использованию знаний для решения целого ряда прикладных задач, включая разработку систем, моделирующих творческие возможности человека. Такие системы и стали называть интеллектуальными.
Сегодня понятия интеллектуальная система и система, ориентированная на обработку и использование знаний, а не системы искусственного интеллекта, являются синонимами. Поэтому по аналогии с физическими системами, кибернетическими системами и т. п. логичнее употреблять термин «интеллектуальные системы», а применительно к области управления - термин «интеллектуальные системы управления».
В историческом аспекте, ранее при создании машин сначала выполняли базовое проектирование (с точки зрения физики и механики), а затем в качестве подсистемы разрабатывали системы управления. При этом обычные машины обладали свойством самоустойчивости и могли работать даже без информационных систем. Затем был разработан аппарат конфигурируемого управления - АКУ (CCV - control configured vehicle), согласно которому более эффективную машину можно спроектировать, если еще на этапе базового проектирования заложить основы системы управления (или хотя бы предположить существование такой системы). В отличие от обычной, спроектированная на основе использования концепции АКУ машина может реализовать свои функции только благодаря существованию системы управления. В случае АКУ существует механическая неустойчивость, которая часто оказывается необходимой для обеспечения соответствующих динамических характеристик.
Устойчивость достигается благодаря наличию контуров управления. В настоящее время концепцию АКУ широко используют в самолетостроении.
Для реализации концепции АКУ несомненно неизбежным является существование информационной системы и системы управления. В этом смысле концепцию АКУ можно отнести к основным руководящим принципам мехатроники и считать, что она относится к понятиям самого высокого ранга. Однако при этом необходимо иметь в виду, что концепция АКУ предъявляет повышенные требования к надежности информационных и управляющих систем. Так, повреждение в электрической цепи двигателя, имеющего электронную регулировку впрыска топлива, приводит к остановке двигателя. Выход же из строя ЭВМ летательного аппарата означает его катастрофу.
Интерес к мехатронике, которая изначально понималась как некий симбиоз механики и электроники, в значительной степени связан с пересмотром ее фундаментальных основ с учетом принципов интеллектуального управления. Эта современная трактовка предполагает, что основой мехатронных систем, машин и т. д. является интеллектуальный мехатронный модуль (ИММ) или, точнее, конечный набор таких модулей.
ИММ должен включать в свой состав высокопроизводительный цифровой контроллер, ориентированный на решение задач обработки информации и управления в реальном времени на основе применения современных интеллектуальных технологий.
Таким образом, принципиальным отличием ИММ от комплектных электроприводов служит наличие интеллектуальной системы управления, которая в сочетании с традиционной (или новой) механикой позволит создать мехатронные машины и комплексы, обладающие значительно более высокими техническими характеристиками по сравнению с существующими образцами. Подобную точку зрения разделяют ведущие отечественные и зарубежные специалисты, говоря о мехатронном модуле движения как об интеллектуальном конструктивном элементе.
Развитие концепции мехатронно-модульного построения сложных электромеханических систем различной конструкции и назначения предполагает комплексное решение целого ряда важнейших проблем. К их числу в первую очередь следует отнести разработку быстродействующих алгоритмов управления, обеспечивающих инвариантность к различного рода возмущениям (что особенно важно для прецизионных систем), принципов динамической развязки быстродействующих приводов с учетом компенсации взаимного влияния отдельных степеней подвижности, алгоритмов управления движением, инвариантных к типу кинематической схемы многозвенного мехатронно-модульного механизма, а также универсальных средств программирования, обеспечивающих возможность постановки прикладных задач на уровне описаний конечных технологических целей.
Пути решения данных проблем имеют по существу два направления:
- разработка высокоскоростных аппаратных средств вычислительной техники;
- разработка специальных алгоритмов на основе современных методов и технологий обработки знаний.
Если первый путь является вполне естественным для японской электронной промышленности с ее высокоразвитой технологической базой, то для России второй представляется более предпочтительным в связи с перспективами использования современных интеллектуальных технологий, уникальные возможности которых достаточно изучены и могут служить эффективной основой как при создании машин нового поколения, так и при модернизации существующего парка оборудования. В соответствии со вторым направлением в России развернут ряд крупных проектов, в частности, по разработке мехатронных узлов обрабатывающих центров XXI в. для тяжелого машиностроения, аэрокосмической, автомобильной и других отраслей промышленности.
В наши дни управление на основе анализа внешних ситуаций (событий) остается одной из ключевых идей интеллектуального управления техническими и организационными системами. Другой базовой идеей является использование средств современной информационной технологии обработки знаний при поиске управленческих решений и формировании соответствующих управляющих воздействий.
По мере совершенствования систем, ориентированных на хранение, пополнение, обработку и использование знаний, начали создаваться системы, в которых результаты принятия решений приближаются по качеству к решениям, принятым человеком-оператором, а по скорости получения решений существенно превышают время реакции человека (особенно в непредсказуемых и непредвиденных ситуациях).
Возникла идея активизировать деятельность систем путем включения в их состав специальных дополнительных блоков формирования управляющих воздействий на основе принятых решений. Такие интеллектуальные системы, непосредственно подключенные к объекту, получили название «активные системы».
Интеллектуальные системы в последнее время стали весьма распространенным коммерческим продуктом, находящим широкий спрос пользователей-специалистов в самых разнообразных областях инженерно-технической и научно-технической сфер деятельности.
Переходим к рассмотрению третьего квалификационного признака развития мехатронных систем - миниатюризации.
Сегодня вопросы миниатюризации являются ключевыми во всех отраслях производства, важнейшее значение они имеют в микроэлектронике, нано-технологиях, генетике и других перспективных направлениях.
Существенное различие уровней развития техники, соответствующих мехатронике и электромеханике, обусловлено, прежде всего, появлением микроэлектроники. Микроэлектроника обеспечила существенное развитие мехатроники.
Современные микроэлектронные устройства обеспечивают принципиально новые возможности для объединения (интегрирования) механики и электроники, которые по своему уровню значительно превосходят существовавшую ранее электромеханику.
Микроэлектроника играет ключевую роль в реализации машин нового поколения - мехатронных модулей и систем (в частности, микроэлектромеханических систем - МЭМС). Можно смело утверждать, что в настоящее время зародилось новое направление в мехатронике - микромехатроника.
По габаритным размерам электромеханические системы (ЭМС) условно можно разделить на три класса:
- миниатюрные имеют размеры в пределах от 10х10х10 мм до 50х50х50 мм;
- микросистемы, размеры которых находятся в диапазоне от микрометра до нескольких миллиметров;
- наносистемы имеют размеры порядка ста нанометров (1 нм = 10 -9 м).
Мехатронные системы микро-перемещений должны обладать достаточно высокой точностью: минимальный шаг обычно не превышает 1 % максимального хода. Для создания устройств с такими характеристиками актуальны принципы мехатроники, базирующейся на соединении в единую систему механических, электронных и электромеханических частей.
Основные преимущества мехатронных систем микромеханики заключаются в компактности модулей и улучшении динамических характеристик вследствие упрощения кинематических цепей, а также высокой надежности и помехозащищенности.
Читайте также: