
Какие функции выполняет устройство компьютерного управления в мехатронной системе или модуле
Целью любой классификации является систематизация информации о некотором объекте в виде упорядоченной структуры для выполнения задач объективного (обеспечение полноты информации) и сравнительного (обеспечение информацией для сравнения) представления объекта. Использование иерархической структуры позволяет упростить поиск интересующей информации об объекте. Это позволяет создать эффективные информационно-поисковые системы на базе компьютерных баз данных.
Классификация характеризуется объектом, признаками классификации и их последовательностью. Согласно классификации создаются образы объекта. Поэтому для одного и того же объекта в зависимости от выбранных признаков и их последовательности, можно построить разные варианты иерархического дерева, т.е. несколько различных классификаций. Выбор предпочтительной классификации осуществляется исходя из требований решения определенной задачи.
На рис. 2.1 представлена классификация мехатронных модулей по конструктивным признакам.
В данной классификации выделено 3 признака достаточно полно характеризующих конструкцию мехатронных модулей (уровень интеграции, число степеней подвижности и вид движений), а также комплекс признаков (технические характеристики), определяющий функциональные возможности модулей.
Классификация мехатронных модулей предусматривает по уровню интеграции: модули движения, мехатронные модули движения и интеллектуальные мехатронные модули. По числу степеней подвижности – 1, 2, 3, и > 3. По виду движений – поступательные и вращательные.
Комплекс признаков технических характеристик включает: развиваемую силу и крутящий момент; величину, быстродействие и точность рабочего хода (линейного и углового).
Рассмотрим мехатронные модули согласно представленной классификации.

Рис. 2.1. Классификация мехатронных модулей
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может быть обеспечена с помощью различных преобразователей движения (передач), структура и конструктивные особенности которых зависят от типа двигателя, вида перемещения выходного звена и их расположения (компоновки).
Преобразователи движения предназначены для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и выходного звена. Для преобразования движения используют винтовые, реечные, цепные, тросовые передачи, а также передачи зубчатым ремнем, мальтийские механизмы и др. Так как электродвигатели в основном высокооборотные, а рабочие скорости выходных звеньев мехатронных моду- лей сравнительно невелики, то для согласования скоростей используют понижающие передачи (редукторы): зубчатые цилиндрические и конические, червячные, планетарные и волновые. Тип преобразователя движения выбирают, исходя из сложности его конструкции, коэффициента полезного действия, люфта в передаче, габаритных размеров и массы, свойств самоторможения, жесткости, удобства компоновки, технологичности, долговечности, стоимости и т. п. Выбор преобразователя движения оказывает существенное влияние на характеристики мехатронного модуля.
Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное движение рейки и, наоборот, поступательного движения рейки во вращательное движение шестерни.
Основными звеньями реечной передачи являются шестерня и зубчатая рейка (рис. 2.2).

Рис. 2.2. Реечная передача
Шестерня- рейка могут иметь прямозубое или косозубое зацепление.
Сегодня вместо зубчатой рейки применяется зубчатый ремень, соединяющий шестерню с подвижной кареткой, на которой крепится объект позиционирования (рис. 2.3).

Рис. 2.3. Привод с зубчатым ремнем с шариковой линейной направляющей EGC-TB-KF фирмы Фесто
Конические редукторы
Конические редукторы предназначены для увеличения крутящего момента и передачи под углом 90 0 .
В конических редукторах используются конические, гипоидные или червячные передачи (рис.2.4).
Червячные редукторы отличаются высокой плавностью хода, низким уровнем шума. Присутствующее трение скольжения снижает коэффициент полезного действия, но при этом обеспечивается необратимость механизма (самоблокировка). В многозаходных червячных редукторах обеспечивается обратимость механизма (рис.2.5).
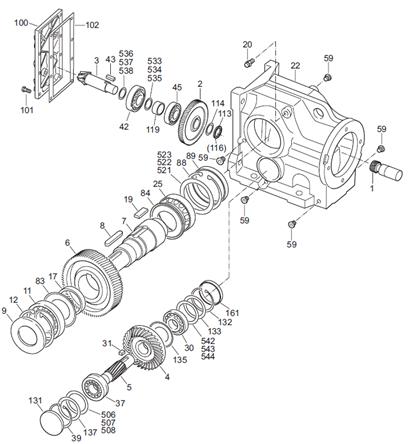
Рис. 2.4. Базовая конструкция конического редуктора фирмы SewEurodrive
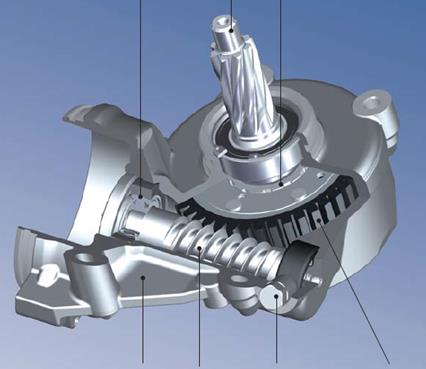
Рис.2.5. Червячный редуктор сервоусилителя рулевого управления
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как показано на рис. 2.5. Движение этих колес сходно с движением планет и поэтому их называют планетарными или сателлитами.
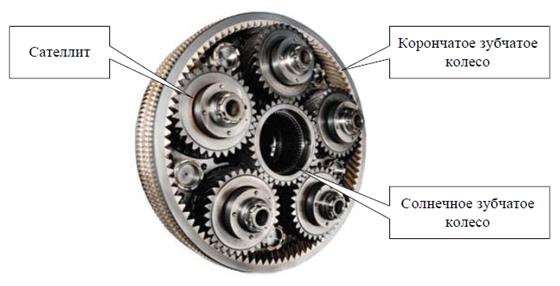
Рис. 2.5. Планетарная передача
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными зубьями, центрального корончатого зубчатого колеса с внутренними зубьями, сателлитов с внешними зубьями, которые входят в зацепление одновременно с солнечным и корончатым колесами, и водила, на котором расположены оси сателлитов (см. рис. 2.5).
В современных мехатронных модулях планетарные зубчатые передачи находят широкое применение благодаря их компактности и малой массы, реализации больших передаточных отношений, малой нагрузки на опоры, большого коэффициента полезного действия, высокой кинематической точности, жесткости и надежности.
При проектировании планетарных зубчатых передач следует учитывать и их недостатки: конструктивную сложность, повышенные требования к точности изготовления и монтажа, снижение коэффициента полезного действия при увеличении передаточного отношения.
В зависимости от порядка наложения связей на звенья планетарные передачи могут использоваться как для суммирования не скольких вращательных движений, так и для их разделения между несколькими ведомыми валами.
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения вследствие волнового деформирования одного из звеньев механизма. Этот принцип впервые был предложен в 1944 году А.И. Москвитиным для фрикционной передачи с электромагнитным генератором волн, а затем в 1969 г. В. Массером для зубчатой передачи с механическим генератором волн. С точки зрения кинематики она представляет собой плане- тарную передачу, у которой одно из колес выполнено в виде гибкого венца.
Волновая зубчатая передача состоит из гибкого зубчатого колеса с наружными зубьями, жесткого зубчатого колеса с внутренними зубьями и генератором волн (рис. 2.6).
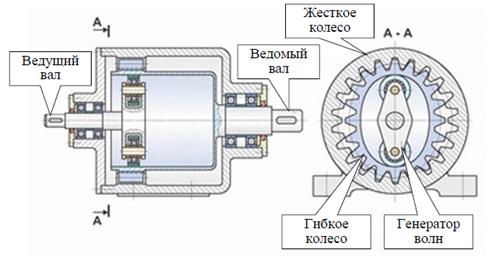
Рис. 2.6. Волновая зубчатая передача
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора волн при больших диаметрах колес (во избежание высокой окружной скорости генератора), мелкие модули зубьев колес, меньшая крутильная жесткость гибкого колеса сравнительно с обычной зубчатой передачи.
Волновые передачи могут работать в качестве редуктора (КПД 80. 90 %) и мультипликатора (КПД 60. 70 %). В первом случае ведущим звеном является генератор волн, во втором – вал гибкого или жесткого колеса.
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного в поступательное движение, и наоборот, поступательного во вращательное движение (при обеспечении отсутствия самоторможения).
Она характеризуется высоким КПД (0,9. 0,95), малым коэффициентом трения - качения, небольшим износом, высокой точностью хода, долговечностью, возможностью полного устранения зазоров, высокой чувствительностью к микроперемещениям, возможностью работы без смазки.
Недостатками передачи являются: достаточно сложная технология изготовления, высокая стоимость, пониженное демпфирование и необходимость защиты от пыли.
В винтовых шариковых парах между рабочими винтовыми по- верхностями винта и гайки (иногда вкладыша) помещены стальные шарики, как показано на рис. 2.7.

Рис. 2.7. Винтовая шариковая пара
Для обеспечения непрерывной циркуляции шариков концы рабочей части винтовой поверхности соединены возвратным каналом. Возвратный канал может представлять собой отверстие, просверленное в теле гайки и соединяющее начало первого витка с концом последнего витка резьбы (см. рис. 2.8), изогнутую трубку, концы которой вставлены в отверстия гайки, просверленные по касательной к поверхности резьбы, специальный вкладыш, который направляет шарики из впадин одного витка через выступ резьбы винта во впадину соседнего витка. Вкладыш вставляют в окно гайки. В большинстве случаев в гайке применяют 3, 4 или 6 окон, расположенных соответственно под углом 120, 90 или 60 градусов.

Рис. 2.8. Винтовые передачи фирмы THOMSON
Примером реализации винтовой передачи является электроцилиндр (Рис. 2.9).
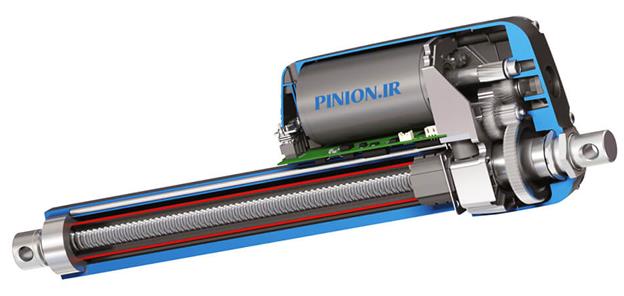
Рис. 2.9. Винтовая передача в электроцилиндре
Мехатронные модули движения
Мехатронный модуль движения (ММД) – конструктивно и функционально самостоятельное изделие, включающее в себя ме-ханическую (гидравлическую, пневматическую), электротехническую, электронную и информационную части, которое можно использовать индивидуально и в различных комбинациях с другими модулями. В отличие от модулей движения (МД) в мехатронных модулях движения (ММД) появились электронные и информационные устройства.
Мехатронные модули движения являются базовыми функциональными устройствами, из которых можно компоновать сложные мехатронные системы.
Примеры мехатронных модулей движения: мехатронные модули движения на основе электродвигателей углового и линейного движения и различных преобразователей движения (винтовых, червячных, планетарных и волновых), безредукторные мехатронные модули движения, безредукторные поворотные столы.
Мехатронный модуль движения состоит из следующих основных частей.
Электродвигатель – преобразователь электрической энергии в механическую.
Механический преобразователь – устройство, преобразующее параметры движения двигателя в требуемые параметры движения выходного звена (может отсутствовать).
В состав механического преобразователя входят:
• преобразователь движения (передача) - механизм, предназначенный для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и выходного звена мехатронного модуля;
• тормозное устройство – устройство, предназначенное для уменьшения скорости подвижного звена, останова и удержания его в неподвижном состоянии (может отсутствовать);
• люфтовыбирающий механизм – устройство, предназначенное для выборки зазора (мертвого хода) в некоторых видах преобразователей движения (может отсутствовать);
• направляющие – устройства, обеспечивающие заданное относительное движение выходного звена мехатронного модуля (может отсутствовать).
Информационное устройство – устройство, преобразующее контролируемую величину в сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а, также для воздействия им на управляемые процессы.
На рис. 2.9 показана схема мехатронного поворотного стола, предназначенного для позиционирования или вращения по заданной программе закрепленной на планшайбе детали для проведения измерительных и разметочных операций или для обработки детали на металлорежущих станках сверлильно-фрезерно-расточной группы.
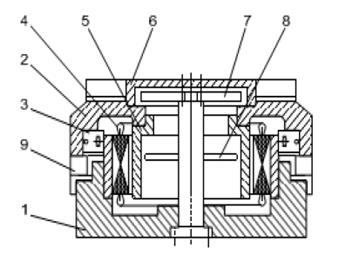
Рис. 2.9. Схема мехатронного поворотного стола
Мехатронный модуль состоит из основания 1 и собственно поворотного стола 2, опирающегося на упорные подшипники 3, встроенного бесконтактного трехфазного электродвигателя 4, ротор 5 которого скреплен с планшайбой 6, датчика 7 положения, датчика 8 скорости и гидротормоза 9, обеспечивающего фиксацию планшайбы в нужном положении. Безредукторное совмещение ротора электродвигателя и планшайбы позволяет полностью исключить люфт и соответственно увеличить точность позиционирования стола и расширить его технологические возможности. При этом упрощается конструкция стола, уменьшается число деталей, повышается жесткость.
Функциональная схема мехатронного поворотного стола представлена на рис. 2.10.

Рис. 2.10. Функциональная схема мехатронного поворотного стола
УПБ – усилительно-преобразовательный блок; КП – координатный преобразователь; РП – регулятор положения
Стол выполнен на основе трехфазного синхронного двигателя. На статоре расположены обмотки, а на роторе – постоянные магниты. Ось ротора связана с датчиком положения (ДП), определяющим угол поворота ротора φ. Дополнительно мехатронный поворотный стол снабжен: датчиками тока (в каждой фазе статорной обмотки), регуляторами фазовых токов, усилителем, тахогенератором (ТГ) и аналогово-цифровым преобразователем (АЦП). Датчики тока, регуляторы и усилитель объединены в единый усилительно-преобразовательный блок (УПБ).
Сигнал с ДП подается на вход координатного преобразователя (КП), на второй вход которого из регулятора положения (РП) поступает немодулированный сигнал управления u. Микропроцессорный КП вычисляет фазные напряжения U1, U2 и U3, меняющиеся по синусоидальному закону в функции электрического угла φэ = р φ (р – число пар полюсов) и сдвинутые относительно друг друга на 120 электрических градусов. Эти напряжения усиливаются по мощности в УПБ и прикладываются к обмоткам статора. Пе-ременные токи статора I1, I2 и I3 порождают пульсирующие магнитные поля, суперпозицией которых является вращающееся магнитное поле статора. В результате взаимодействия магнитных полей статора и ротора возникает вращающий момент, приводящий ротор в движение. При подаче постоянного входного сигнала u разгон двигателя осуществляется до тех пор, пока величины противо-ЭДС e1, e2 и e3 не уравновесят фазовые напряжения U1, U2 и U3.
Примеры мехатронных модулей движения
Примером использования передачи «винт-шариковая гайка» служит электрический линейный модуль движения (рис.2.11). Шариковая гайка преобразует вращательное движение винта в осевое перемещение каретки с минимальными потерями благодаря шарикам реализующим трение качения.
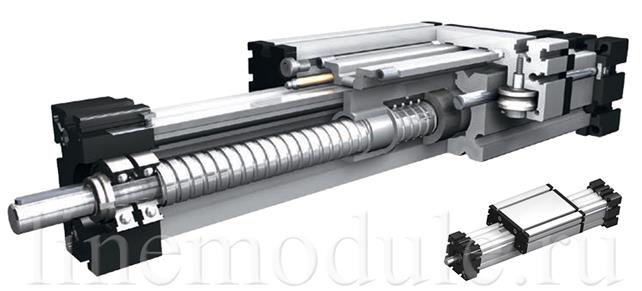
Рис.2.11. Линейный модуль движения
ü Высокая точность позиционирования;
ü Плавное перемещение;
ü Высокие усилия;
ü Высокая жесткость;
ü Повторяемость: ± 10 мкм;
ü Средняя цикличность;
ü Самотормозящаяся передача;
ü Возможность выбора направляющих скольжения или качения;
ü Продолжительный срок службы, составляющий до 20 миллионов циклов.
В настоящее время широкое применение находят электроцилиндры.
Большие усилия, высокая точность позиционирования и легкость электронного управления их главные преимущества.

Рис.2.12 Линейный модуль движения - Электроцилиндр фирмы Фесто
Линейный привод с зубчатым ремнем - это оптимальное по стоимости решение.
Идеальный вариант для применений и задач с невысокими требованиями в плане механической нагрузки, динамики отклика и точности.

Рис. 13. Привод с зубчатым ремнем с шариковой линейной направляющей EGC-TB-KF фирмы Фесто
ü Высокая скорость: до 10 м/с;
ü Высокая цикличность;
ü Повторяемость ± 50 мкм;
ü Минимальный уровень шума;
ü Встроенная система смазки на 10 000 км работы, исключающая необходимость обслуживания4
ü Низкая стоимость.
В поворотном приводе используются планетарные, волновые или другие типы редукторов.
Зубчатое зацепление идеальный вариант для применений и задач с высокими требованиями в плане механической нагрузки, динамики отклика и точности.

Рис. 2.14. Поворотный модуль
Ярким примером комбинированной передачи «винт-шариковая гайка» и ременной передачи служит электрический усилитель рулевого управления автомобиля. Электродвигатель постоянного тока (рис.2.15) на выходном валу которого насажена шестерня 3 приводит в действие через зубчатый ремень 2 ведомую шестерню 4 с шариковой гайкой 5. Шариковая гайка преобразует вращательное движение в осевое перемещение винта 1 с минимальными потерями благодаря шарикам 7 реализующим трение качения.
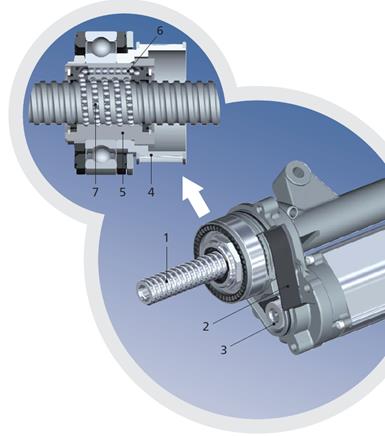
Рис.2.15. Ременная передача и передача «винт – шариковая гайка» электроусилителя ZF-Servolectric®
План работы
1. Определить передаточное отношение: реечной передачи, червячного редуктора и планетарной передачи.
Контрольные вопросы
1. Конструктивные особенности реечных передач.
2. Какие основные преимущества шарико-винтовых передач?
3. Приведите примеры мехатронных модулей с шарико-винтовыми передачами.
4. Приведите примеры мехатронных модулей использующих привод с зубчатым ремнем.
Список литературы
1. Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. пособие для студентов вузов. – М.:Машиностроение, 2006. – 256 с.
2. Подураев Ю.В. Основы мехатроники: Учебное пособие. – М.: МГТУ «Станкин», 2000 – 80 с.
3. Хомченко В. Г. Мехатронные и робототехнические системы: учеб. пособие / В. Г. Хомченко, В. Ю. Соломин. – Омск: Изд-во ОмГТУ, 2008. – 160 с.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.034)
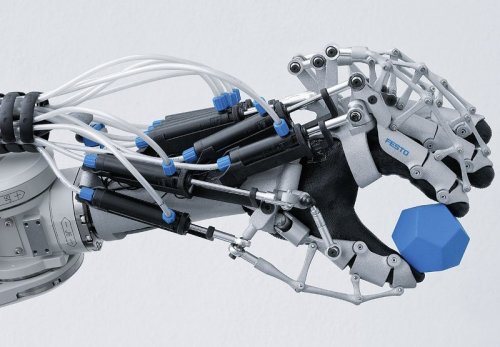
Пневматические устройства мехатронных систем
Мобильные машины, роботы и различные мехатронные системы имеют возможность передвигаться или изменять положение своих частей благодаря исполнительным механизмам. Направление перемещения той или иной части системы именуется степенью свободы, и чем больше степеней свободы у исполнительного механизма — тем больше у машины, робота или исполнительного устройства подвижность.
В зависимости от типа исполнительного устройства, достигается более или менее качественная реализация взаимодействия частей машины друг с другом, а также эффективность и гибкость ее работы. Подбор типа исполнительного устройства является сложной задачей, которая решается на этапе конструирования системы инженерами робототехниками и технологами.
Один из популярных типов исполнительных устройств, применяемых в мехатронных системах — пневматическое исполнительное устройство. В качестве рабочего тела здесь используется газ, обычно это сжатый воздух, энергия которого и приводит механизм в движение. Вот почему пневматические исполнительные устройства отличаются дешевизной, надежностью, простотой настройки и управления, а также пожаробезопасностью. Затраты на приобретение и утилизацию рабочего тела (воздуха) отсутствуют.
Однако есть и некоторые недостатки, например возможно снижение рабочего давления из-за утечки в связи с плохой герметичностью трубок, что ведет к потерям мощности и скорости, а также усложнению позиционирования. Тем не менее, пневмомоторы, пневмоцилиндры и момнетальные пневмодвигатели находят сегодня достаточно широкое применение в роботах и мобильных машинах.

Давайте рассмотрим устройство типичного пневмопривода. Пневматический привод как таковой обязательно включает в себя компрессор и пневмодвигатель. В данном сочетании система способна осуществлять преобразование механической характеристики привода в соответствии с требованиями нагрузки.
Пневмоприводы поступательного движения бывают двухпозиционными, когда перемещение рабочего органа осуществляется между двумя крайними положениями, а также многопозиционными, когда перемещение происходит в различные положения.
По принципу действия пневмоприводы могут быть одностороннего действия (когда возврат в исходное положение обеспечивает пружина) или двухстороннего действия (возврат, как и рабочее движение, производятся сжатым воздухом). Пневмоприводы поступательного движения подразделяются главным образом на два типа: поршневые и мембранные.
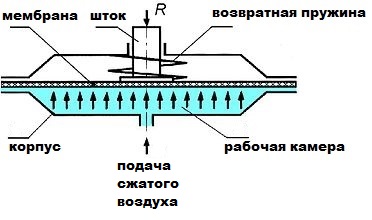
У поршневого пневмопривода в цилиндре под действием сжатого воздуха или пружины (обратный ход у привода одностороннего действия обеспечивается пружиной) перемещается поршень. У мембранного пневмопривода разделенная мембраной на две полости камера имеет с одной стороны давящий на мембрану сжатый воздух, а с другой стороны к мембране прикреплен шток, принимающий от мембраны продольное усилие. Так, пневмотический привод успешно находит применение в системах с цикловым управлением, например в манипуляторах с горизонтальным перемещением штока.
Функционально пневмопривод можно разделить на четыре блока: блок подготовки воздуха, блок распределения сжатого воздуха, блок исполнительных двигателей, и система передачи сжатого воздуха в исполнительные устройства.
В блоке подготовки воздуха воздух осушается и очищается от пыли. Распределительный блок по программе открывает или закрывает (при помощи клапанов) подачу сжатого воздуха в полости исполнительных двигателей.
Управление клапанами обычно производится с помощью электромагнитов или также пневматическим способом (если среда взрывоопасная). Блок исполнительных двигателей — это по сути цилиндры с поршнями, которые вращаются либо движутся прямолинейно — пневмоцилиндры, отличающиеся заданными перемещениями, усилиями и скоростями.
Каждый двигатель имеет свой рабочий цикл, причем последовательность циклов строго определена технологическим процессом и контролируется соответствующей программой системы управления роботом. Система передачи сжатого воздуха в разные устройства использует пневмоприводы с разным сечением, в соответствии с поставленной задачей.

В целом передача и преобразование энергии в пневмоприводе выглядит так. Главный приводной двигатель вращает компрессор, который сжимает воздух. Сжатый воздух затем подается через регулирующую аппаратуру в пневмодвигатель, где его энергия преобразуется в механическую (движение поршня, штока). После — рабочий газ выбрасывается в окружающую среду, то есть в компрессор он уже не возвращается.
Достоинства пневматических исполнительных устройств трудно переоценить. По сравнению с жидкостями, воздух более сжимаем, менее плотен и вязок, более текуч. Вязкость воздуха возрастает с увеличением давления и температуры.
Но поскольку воздух всегда содержит в небольшом количестве водяной пар и не имеет смазочных свойств, то имеется риск вредного влияния конденсата на рабочие поверхности камер. Поэтому пневматические приводы нуждаются в кондиционировании воздуха, то есть в предварительном придании ему таких свойств, чтобы продлить срок службы привода в котором он используется в качестве рабочего тела.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Системы управления мехатронными устройствами
Системы управления мехатронными устройствами – системы, предназначенные для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с заданной программой.
В общем случае система автоматического управления (рис.3.1) состоит из: объекта управления (ОУ), измерительного устройства (ИУ), задающего устройства (ЗУ), суммирующего устройства, усилителя (У) и исполнительного механизма (ИМ).
Рис. 3.1 Обобщенная структурная схема САУ
ЗУ оказывает управляющее воздействие на вход системы, которое может иметь постоянную заданную величину при необходимости поддержания постоянного заданного значения управляемой величины или же изменяться по определенному закону.
Воздействие выхода системы управления на ее вход называют обратной связью. Введение обратной связи позволяет управлять при изменении параметров объекта управления и недостаточности наших знаний о его поведении.
Воздействие входного сигнала на объект управления, переработка его в выходной сигнал и обратное воздействие выхода через канал обратной связи на входную величину представляет собой процесс передачи и переработки информации.
Алгоритм управления САУ сводится к следующему: измерение фактического значения управляемой величины, сравнение фактического значения с заданным, выработка управляющего воздействия.
В качестве примера системы управления мехатронным объектом рассмотрим подсистему управления современным автомобилем – определение дистанции безопасности и скорости (рис.3.2). Эта технология обеспечивает возможность управлять расстоянием между транспортным средством и препятствием (или другим транспортным средством) интегрируя датчик cruise control и ABS systems. Структурная реализация данной подсистемы управления показана на рис. 3.3.
Рисунок 3.4 показывает типичную мехатронную систему с механическими, электрическими, и компьютерными компонентами. Процесс системного сбора данных начинается с измерения физического значения датчиком. Датчик способен измерить некоторый сигнал, в форме уровня напряжения или формы волны. Этот аналоговый сигнал посылают аналого-цифровому конвертеру (
аналого-цифровой преобразователь). Обычно используя процесс последовательного приближения, аналого-цифровой преобразователь отображает аналоговый входной сигнал на цифровое устройство вывода. Это цифровое значение с
Рис. 3.4 Система управления мехатронным объектом
(Robert H. Bishop [1, 2])
оставлено из набора двойных значений названных битами (представленное из 0 и 1). Набор битов представляет десятичный или шестнадцатеричный номер, который может использоваться микроконтроллером. Микроконтроллер состоит из микропроцессора плюс память и другие доступные устройства. Программа в микропроцессоре использует это цифровое значение наряду с другими вводами и предзагруженными значениями названными калибровками, чтобы определить команды вывода. Подобно вводу на микропроцессор, эти выводы находятся в цифровой форме и могут быть представлены набором битов. Цифро-аналоговый конвертер (ЦАП) используется, чтобы конвертировать цифровое значение в аналоговый сигнал. Аналоговый сигнал используется приводом головок, чтобы управлять физическим устройством или затрагивать физическую среду. Датчик производит новые измерения и повторяется процесс, таким образом завершая цикл управления с обратной связью. Синхронизация для этой полной операции производитсяпри помощи часов.
Проектировщик, перед которым стоит задача синтеза высококачественной системы в условиях значительной неопределенности вынужден искать решение в классе робастных систем. Методы синтеза систем управления предполагают, что модели объекта и регулятора известны, и они имеют постоянные параметры. Однако модель реальной физической системы всегда будет неточной по следующим причинам:
- Изменение параметров в силу тех или иных обстоятельств.
- Динамические свойства, не учтенные в модели.
- Не учтенное запаздывание по времени.
- Изменение положения рабочей точки (положения равновесия).
- Непредсказуемые внешние возмущения.
Целью синтеза робастной системы является гарантия требуемого качества независимо от погрешностей и изменения параметров модели. Система , обладающая допустимы ми изменениями качества при изменении или неточности ее модели, называется робаст ной.
Робастная система управления обладает требуемым качеством несмотря на существенную неопределенность характеристик объекта управления.

С
труктура системы, включающая потенциальные неопределенности, изображена на рис. 3.5. Данная модель учитывает шум датчика N ( s ) , непредсказуемое возмущение D ( s ) и объект управления G ( s ) с неучтенной динамикой или параметрами, подверженными из менению. Все эти факторы могут быть весьма значительными, поэтому проблема заклю чается в том, чтобы синтезируемая система сохраняла желаемое качество.
О
Рис. 3.5 Структура робастной системы управления
т робастной системы требуется, чтобы она (1) обладала низкой чувствительностью, (2) сохраняла устойчивость и (3) удовлетворяла требованиям, предъявляемым к ее качеству, в достаточно большом диапазоне изменения ее параметров. Робастность по сути дела характеризуется чувствительностью системы к факторам, которые не учитывались на этапах анализа и синтеза — например, к возмущениям, шуму датчика и не отраженным в модели системы параметрам, влияющим на ее динамику. Система должна быть способна противодействовать влиянию этих факторов при выполнении задач, ради которых она проектировалась.

Система управления позиционированием туннельного микроскопа должна обладать точностью порядка нанометров. Одним из основных ее элементов является пьезодатчик, который изменяет свой размер в зависимости от приложенного к кристаллу напряжения. «Апертура» туннельного микроскопа обеспечивается тончайшим вольфрамовым зондом, конец которого заточен так, что он может состоять только из одного-единственного атома и иметь ширин) 0,2 нм. Пьезоэлектрическая система управления подводит конец зонда к поверхности проводящего образца на расстояние одного-двух нанометров — так близко, что электронные облака атома на конце зонда и ближайшего к нему атома образца частично перекрываются. Датчик обратной связи определяет изменение туннельного тока и преобразует его в напряжение, используемое для управления перемещением по оси г. Пьезоэлектрическое управляющее устройство перемещает зонд по вертикали так, чтобы стабилизировать туннельный ток и поддерживать постоянным зазор между концом зонда и поверхностью образца. Система управления положением зонда изображена на рис. 3.6, (а), а ее структурная схема приведена в части (б) этого рисунка.

В
Рис. 3.6 Система управления туннельным микроскопом
се системы автоматического управления и регулирования делятся по различным признакам на следующие основные классы.
1 По основным видам уравнений динамики процессов управления:
а) линейные системы;
б) нелинейные системы.
2 В зависимости от коэффициентов уравнений и вида уравнений как линейные, так и нелинейные системы подразделяются на:
а) системы, описываемые обыкновенными дифференциальными уравнениями с постоянными коэффициентами;
б) системы, описываемые обыкновенными дифференциальными уравнениями с переменными коэффициентами;
в) системы, описываемые уравнениями в частных производных;
г) системы с запаздыванием, описываемые уравнениями с запаздывающим аргументом.
3 По характеру представления сигналов различают:
а) непрерывные системы;
б) дискретные системы, среди которых выделяют импульсные, релейные, цифровые.
4 По характеру процессов управления:
а) детерминированные системы - системы с определенными переменными и процессами;
б) стохастические системы - системы со случайными переменными и процессами.
5 По характеру функционирования.
В зависимости от того, по какому закону изменяется заданное значение регулируемой величины, системы автоматического управления подразделяются на:
а) системы стабилизации, поддерживающие постоянство регулируемой величины ;
б) системы программного регулирования, в которых заданное значение регулируемой величины изменяется по определенной заранее временной программе;
в) следящие системы, в которых заданное значение регулируемой величины изменяется в соответствии с состоянием некоторого заданного вектора переменных во времени;
г) системы оптимального управления, в которых показатель эффективности зависит не только от текущих значений координат, как в экстремальном регулировании, но также от характера их изменения в прошлом, настоящем и будущем, и выражается некоторым функционалом. Нахождение оптимального управления предполагает решение достаточно сложной математической задачи соответствующими методами, кроме того органической составной частью системы является компьютер;
д) адаптивные системы, в которых автоматически изменяются значения у зад , собственные параметры или структура при непредвиденных изменениях внешних условий на основании анализа состояния или поведения системы так, чтобы сохранялось заданное качество ее работы. Системы с изменением заданного значения регулируемой величины называют экстремальными, с изменением параметров - самонастраивающимися, с изменением структуры - самоорганизующимися.
Структурная схема микропроцессорной системы управления мехатронного узла производственного назначения
Применение микропроцессоров в автоматизированных производственных процессах потребовало пересмотра структуры и состава технических средств, совокупности выполняемых функций и их распределения между компонентами системы, способа представления информации, роли математических моделей в алгоритмах управления и контроля. Одним из принципиально новых подходов к созданию автоматизированных систем управления является применение вычислительных систем с программируемыми контроллерами, микропроцессорами, микрокомпьютерами и др. Структурная схема управления с применением микропроцессоров (МП) представлена на рис. 3.7.

Рис. 3.7 Структурная схема микропроцессорной системы управления:
Х - вход объекта; Y - состояние объекта; Е - множество возмущений; U0 - управляемый вход; Xn - множество входных значений; Yn - множество выходных параметров состояние объекта; U - информация об управляющих воздействиях; Z - цель управления
Микропроцессорное устройство управления - это специализированное вычислительное устройство, состоящее из МП или микроЭВМ и включающее средство для обмена сигналами с объектом управления. Алгоритмы управления реализуются в виде программ, хранящихся в памяти микроЭВМ. Интерфейсные блоки предназначены для связи с объектом, пульт оператора - для выдачи команд в микроЭВМ на специальном языке. Центральные контроллеры преобразуют и выдают в микроЭВМ показания датчиков о состоянии объекта и cреды.
На экране дисплея отображается необходимая оператору информация о состоянии объекта и периферийного оборудования. В состав интерфейсных блоков связи и контроллеров могут входить микропроцессоры. В этом случае центральный процессор освобождается от функций по вводу-выводу и предварительной обработки информации.
Типовой микропроцессорный комплект (МПК) представляет собой функционально полный набор БИС, предназначенный для построения вычислительных и управляющих устройств и систем различного назначения. В состав МП обычно входят БИС: МП, микропрограммного управления, обмена информацией, оперативной, постоянной и полупостоянной памяти. В дополнительный комплект могут входить: БИС ускоренного переноса, БИС арифметического расширителя, БИС прямого доступа к памяти, БИС управления периферийным оборудованием и др.
Разработка микропроцессорной системы автоматического управления ТП включает следующие этапы:
- выработка базовой концепции;
- разработка алгоритма управления;
- проектирование аппаратных средств;
- написание и кодирование рабочих программ.
Использование МП в таких системах управления ТП возможно в виде:
- системы сбора данных;
- советчика оператора, обеспечение супервизирного и непосредственного цифрового управления.
Система сбора данных является одной из простейших форм использования МП. Параметры производственного процесса преобразуются в цифровую форму, воспринимаются системой ввода и заносятся в запоминающее устройство (ЗУ). МП производит логическую обработку и преобразование информации. Результаты вычислений отображаются на экране дисплея или печатаются в форме, удобной для восприятия оператором. Режим производственного процесса поддерживается регуляторами, установки которых осуществляются вручную оператором. Применение системы сбора данных позволяет изучать процесс при различных условиях работы с целью уточнения или построения его математической модели.
При использовании МП в качестве советчика оператора его выходы связаны не с органами управления технологическим аппаратом, а лишь с устройством отображения. При этом система по заложенной в нее математической модели вычисляет управляющие воздействия для приближения режима процесса к оптимальному. Управляющие воздействия осуществляются оператором.
При супервизорном управлении МП работает в замкнутом контуре, когда выходы системы управления связаны с технологическими агрегатами, и все установки регуляторов осуществляются системой. Функции оператора сводятся к наблюдению, и его вмешательство требуется лишь при возникновении отказов в системе или каких-либо непредвиденных ситуациях.
В режиме непосредственного цифрового управления сигналы для приведения в действие исполнительных органов поступают непосредственно от ЭВМ, а регуляторы отдельных параметров исключаются из системы. Система управления работает в реальном масштабе времени. Применение таких вычислительных систем в ТП ремонта судов открывает дополнительные возможности повышения эффективности СРП.
Управление производственными процессами с помощью мини- компьютеров осуществляется по прямой или косвенной схеме (рис. 3.8).
Основными достоинствами косвенной схемы являются быстрая адаптация к системе уже существующего оборудования, простота в обслуживании и эксплуатации, бесперебойность работы оборудования в случае выхода из строя мини-компьютера.
При прямой схеме управления осуществляется обратная связь от мини-компьютера к управляющей панели и от нее к оборудованию. Эти воздействия передаются на исполнительные механизмы для их включения или выключения, изменения режимов работы или состояния в соответствии с программами, заложенными в памяти мини-компьютера.
На рис. 3.9 представлена структурная схема устройства сбора данных на базе МПК. Устройство сбора предназначено для контроля выходных сигналов датчиков при изменении параметров ТП. Устройство сбора имеет гибкую и легко изменяемую конфигурацию, аналоговые и цифровые входы и выходы, каналы для подключения модемов, телетайпов и печатающих устройств.
В состав системы входят: микропроцессор МП, оперативное запоминающее устройство ОЗУ, пульт управления ПУ, блок индикации БИ, выносной дисплей ВД, аппаратура передачи данных АПД, коммутаторы аналоговых и цифровых каналов КАК и КЦК , буферная память БЗУ, дешифратор управляющих воздействий ДШ, блок регистрации БР, блок формирования управляющих воздействий БФУВ, усилитель с регулируемым коэффициентом усиления УС. Все органы управления и индикации адресуются как устройства ввода и вывода и управляются программно.
На линии ЭВМ возлагаются функции регистрации и индикации полученной информации, выдачи команды для изменения пределов или переменных, по которым осуществляется регулирование в рассматриваемых точках.
На рис. 3.10 приведена структурная схема системы числового программного управления (СЧПУ) "Электроника НЦ-80-31", предназначенной, для управления фрезерными, шлифовальными и токарными станками, многооперационными обрабатывающими центрами. В состав системы входят три микро-ЭВМ. Каждая ЭВМ имеет блоки оперативной и постоянной памяти. ЭВМ-1 управляет работой всей системы; ЭВМ-2 обеспечивает обработку заданных перемещений рабочими органами; ЭВМ-3 - управляет работой электрооборудования станка.
Мехатроника изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, систем, машин и комплексов машин с интеллектуальным управлением их функциональными движениями.
Синергия – это совместное действие, направленное на достижение общей цели. При этом составляющие части не просто дополняют друг друга, но объединяются таким образом, что образованная система обладает качественно новыми свойствами.
Робототехника – это наука создания технических систем с автоматизацией. Это значит, что робототехника, по сути есть синтез программирования управляющего софта, механики и электроники, так как роботы – всё же пока ещё электронные механизмы.
Структура и основные составляющие мехатронных модулей
механическое устройство, конечным звеном которого является рабочий орган;
блок приводов, включающий силовые преобразователи и исполнительные двигатели;
устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть;
сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении МС.
Принципы построение мехатронных систем
Наличие: выходного механического звена (ВМЗ), выполняющего внешние функции мехатронного устройства; силового электромеханического привода выходного звена; устройства программного управления приводом; информационной системы, контролирующей состояние окружающей среды и состояние самого мехатронного устройства.
Минимум преобразований информации и энергии (например, использование высокомоментных или линейных двигателей без редукторов) – принцип минимума преобразований.
Использование одного и того же элемента мехатронного устройства для реализации нескольких функций – принцип совмещения функций.
Объединение корпусов мехатронного устройства – принцип совмещения корпусов.
Применение сверхплотного монтажа элементов.
механизм, состоящий из корпуса, привода и выходного механического звена. Последнее может включать силовой элемент, механическую передачу движения, рабочий орган или другой оконечный элемент ВМЗ;
усилитель мощности силового элемента;
устройство управления усилителем мощности;
внутреннюю информационную систему (датчики состояния самого мехатронного узла, средства обработки информации с датчиков);
внешнюю информационную систему (сенсоры информации о внешней среде мехатронного узла, средства обработки этой информации);
устройство управления мехатронным узлом.
Принципы интеграции мехатронных систем
Назначением мехатронных модулей является реализация заданного управляемого движения, как правило, по одной управляемой координате.
Мехатронные модули движения являются теми функциональными «кубиками», из которых затем можно компоновать сложные многокоординатные мехатронные системы.
Классификация типов механического движения по функциональному назначению
Машиностроение
Полиграфическая промышленность
Текстильная и легкая промышленность
Упаковочно-расфасовочная техника
Нефтегазодобывающая
Электродвигатели
Двигатели внутреннего сгорания
Пневмо и гидродвигатели
ТС колесного и гусеничного
Двуногие шагающие роботы
Устройства передвижения для инвалидов
Задвижки нефтегазоперекачивающих трубопроводов и трубопроводов водо и теплоснабжения
Задвижки нефтегазоперерабатывающих установок
Автоматические коробки передачи, автоматические стеклоочистители и стеклоподъемники
Рули управления самолетами с автопилотом
Исполнительные органы в системе наведения ракет и зенитных установок
Классификация типов механического движения по типу движения рабочего органа в пространстве
Пространственное движение - Когда РО имеет точки , траектории движения которых не лежат в одной плоскости
Плоское движение – когда все точки РО перемещаются в одной плоскости либо в параллельной
Классификация типов механического движения в плоскости и во времени
С постоянной скоростью
С переменной скоростью без остановок
С мгновенными остановками
Реверсивное движение с мгновенными остановками в момент смены направления движения
Реверсивное движение с остановками конечной продолжительности между периодами движения в разных направлениях
Сложное движение (реверсивное комбинированное) когда в одни периоды времени РО совершает все возможные варианты однонаправленного движения в другие, все возможные варианты реверсивного движения
Классификация типов механического движения по периодичности смены режимов движения
Упаковочно-расфасовочная техника
Переплетно- оберточная техника
Подъем опускание
25. Особенности постановки задач управления мехатронными системами.
комплекс исполнительных приводов,
механическое устройство с рабочим органом,
блок сенсоров,
объект работ, с которым взаимодействует рабочий орган.
Движение рабочего органа как конечного управляемого звена обеспечивается взаимосвязанными (кинематически и динамически) перемещениями нескольких исполнительных приводов и звеньев механического устройства.
Задача управления мехатронной системой должна быть решена в пространстве (т.е. найдены оптимизированные траектории движения всех звеньев, включая рабочий орган) и во времени (т.е. определены и реализованы желаемые скорости, ускорения и развиваемые усилия для всех приводов системы).
Для многих технологических задач параметры внешних и возмущающих воздействий, приложенных к рабочему органу и отдельным мехатронным модулям, заранее не определены.
Сложность построения адекватных математических моделей мехатронных систем традиционными аналитическими методами (особенно прецизионных многосвязных систем, включающих динамическую модель технологического процесса).
Для планирования заданного движения мехатронной системы необходимо решить обратную задачу о положении механизма. Суть данной задачи состоит в определении требуемых перемещений звеньев системы по заданному закону движения рабочего органа.
Как известно, положение схвата манипулятора однозначно определяется его обобщенными координатами, а именно:
, |
где: – вектор абсолютных координат схвата;
– вектор обобщенных координат манипулятора;
– число степеней подвижности манипулятора.
Дифференцируя (8.6) по времени, получим
, |
где – матрица Якоби размерностью для преобразования (8.7).
В терминах рассматриваемой нами обратной задачи кинематики манипуляционных систем матрица Якоби (размерностью ) имеет вид:
Выражение (8.7) представляет собой прямую скоростную задачу и её решение при известных (заданных) функциях не представляет собой принципиальных трудностей.
При этом вектор обобщенных координат Q является неизвестным и значения приходится для данного момента времени (рассчитываемого момента реального времени) брать с датчиков обратной связи, фиксирующих текущее положение i-го звена относительно (i-1)-го, то есть значение .
В выражении (8.9) есть обратная матрица по отношению к матрице Якоби .
Рассмотрим более подробно последовательность решения прямой и обратной скоростных задач на примере простого манипулятора с двумя степенями подвижности (рис. 8.9).
27. Принципы построения систем интеллектуального управления в мехатронике
способность автономно (без участия человека-оператора) принимать решения о поведении системы в некоторых заранее не определенных ситуациях;
возможность адаптировать (приспосабливать) структуру и законы движения мехатронной системы к изменяющимся условиям внешней среды и возмущающим воздействиям;
способность системы управления к самообучению и накоплению знаний в процессе действий управляемой машины и их использование в последующих задачах управления;
применение процедур оптимизации на этапах планирования, программирования и исполнения всех функциональных движений машины;
оценка качества выполняемых движений и диагностика фактического состояния управляемой машины и протекающих процессов в реальном времени;
эффективное взаимодействие с человеком-оператором, использование его интеллекта как эксперта и навыков при планировании действий машины;
иерархичность структуры системы с четким выделением функций, информационного обеспечения и обратных связей для каждого уровня управления;
гибкое взаимодействие распределенных подсистем через компьютерные сети для достижения общих для всей системы целей управления;
повышенные показатели гибкости, робастности и точности управления.
остановить движение и вернуться в исходную позицию;
определить тип и характеристики препятствия и убрать обнаруженный объект;
продолжить исполняемое движение, игнорируя наличие внешнего объекта.
Стратегический уровень управления предназначен для планирования движений мехатронной системы. Планирование движений предполагает разбиение задачи движения, поставленной интеллектуальным уровнем, на последовательность согласованных во времени элементарных действий и формализацию целей управления для каждого из этих действий.
вывод рабочего органа в заданную позицию;
захват предмета;
тестовое движение для определения сил реакции со стороны объекта;
транспортировка объекта и возвращение робота в исходную позицию.
Тактический уровень выполняет преобразование команд управления движением, поступающих со стратегического уровня управления, в программу управления, которая определяет законы согласованного движения во времени всех звеньев механического устройства с учетом технических характеристик блока приводов (в первую очередь ограничений на обобщенные скорости, ускорения и силы).
На тактическом уровне необходимо определить обобщенные координаты манипулятора, которые соответствуют желаемым декартовым координатам характеристической точки схвата. Для этого должна быть решена обратная задача о положении манипулятора.
Исполнительный уровень управления предназначен для расчета и выдачи управляющих сигналов на блок приводов мехатронной системы в соответствии с программой управления с учетом технических характеристик силовых преобразователей.
Для иерархических систем управления в мехатронике действует принцип, согласно которому по мере продвижения от высших к низшим уровням управления понижается интеллектуальность системы, но повышается ее точность. При этом под «интеллектуальностью» понимается способность системы приобретать специальные знания, позволяющие уточнить поставленную задачу и определить пути ее решения, а под «неточностью» – неопределенность в операциях по решению данной задачи.
32. Адаптивное регулирование по эталонной модели
Эталонная модель показывает идеальную желаемую реакцию системы на задающий сигнал g(t). В качестве эталонной модели применяют типовые звенья систем автоматического управления (например, апериодическое звено). Параметры ПИД-регулятора настраиваются так, чтобы минимизировать рассогласование между выходом модели и реальной системы.
Задача контура настройки состоит в том, чтобы свести это рассогласование к нулю за определенное время с гарантией устойчивости переходного процесса. Данная проблема далеко не тривиальна – можно показать, что она не решается при линейных соотношениях «ошибка – коэффициенты регулятора». Например, в литературе предложен следующий алгоритм настройки параметров:
, | (4.2) |
где k – настраиваемые коэффициенты ПИД-регулятора; А – постоянный коэффициент, задающий скорость адаптации.

33. Нечёткий регулятор — регулятор, построенный на базе нечеткой логики
Методологической основой разработки мехатронных систем служат методы параллельного проектирования (concurrent engineering methods). При традиционном проектировании машин с компьютерным управлением последовательно проводится разработка механической, электронной, сенсорной и компьютерной частей системы, а затем выбор интерфейсных блоков.
Парадигма параллельного проектирования заключается в одновременном и взаимосвязанном синтезе всех компонент системы.
На рис.1. представлена обобщенная структура машин с компьютерным управлением (автоматических роботов), используемых в машиностроении. Данная схема позволяет показать принципы построения мехатронных систем.
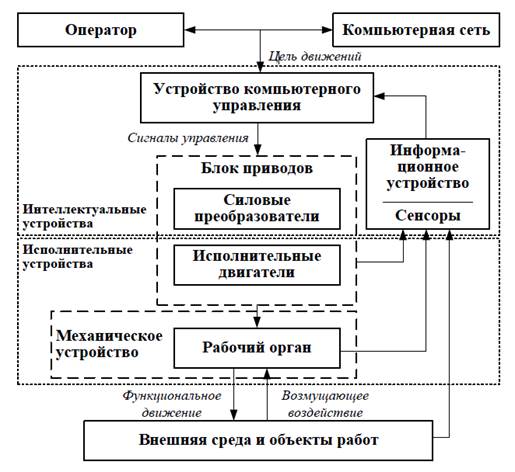
Рис. 1. Обобщенная схема машины с компьютерным управлением движением
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит основное и вспомогательное оборудование, технологическую оснастку и объекты работ.
При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы и моменты сил при сборке, сила реакции струи жидкости при операции гидравлической резки.
Внешние среды делят на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью для проектирования мехатронных систем. Некоторые среды являются недерминированными по своей природе (например, экстремальные среды: подводные, подземные и т.п.). Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. Например, для определения сил резания при механообработке проводятся экспериментальные исследования на специальных установках, параметры вибрационных воздействий измеряют на вибростендах с последующим формированием математических и/или компьютерных моделей возмущающих воздействий.
Однако для проведения таких исследований, как правило, требуются слишком сложные и дорогостоящие аппаратура и измерительные технологии. Так для предварительной оценки силовых воздействий на рабочий орган на операции роботизированного удаления облоя с отливок необходимо контролировать их форму и размеры. В таких случаях целесообразно применять методы адаптивного управления, которые позволяют автоматически корректировать закон движения рабочих органов мехатронных систем непосредственно в ходе выполнения операции.
В состав традиционной машины входят следующие основные компоненты: механическое устройство (конечное звено - рабочий орган; блок приводов, включающий силовые преобразователи и исполнительные двигатели; устройство компьютерного управления, верхним уровнем для которого является человек-оператор, либо другая ЭВМ, входящая в компьютерную сеть; сенсоры, предназначенные для передачи в устройство управления информации о фактическом состоянии блоков машины и движении мехатронной системы.
Таким образом, наличие трех обязательных частей – механической (электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком мехатронных систем.
Электромеханическая часть включает механические звенья и передачи, рабочий орган, электродвигатели, сенсоры и дополнительные электротехнические элементы (тормоза, муфты). Механическое устройство предназначено для преобразования движений звеньев в требуемое движение рабочего органа. Электронная часть состоит из микроэлектронных устройств, силовых преобразователей и электроники измерительных цепей. Сенсоры предназначены для сбора данных о фактическом состоянии внешней среды и объектов работ, механического устройства и блока приводов с последующей первичной обработкой и передачей этой информации в устройство компьютерного управления. В состав этого устройства обычно входят компьютер верхнего уровня и контроллеры управления движением.
Устройство компьютерного управления выполняет следующие основные функции:
• управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации;
• организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами.
• взаимодействие с оператором через интерфейс в режимах автономного программирования (off-line) и непосредственно в процессе движения мехатронной системы (on-line).
• организация обмена данными с периферийными устройства-ми, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления, в целенаправленное механическое движение с управлением на основе принципа обратной связи.
Характерно, что электрическая энергия (реже гидравлическая или пневматическая) используется в современных системах как промежуточная энергетическая форма.
Особенность мехатронного подхода к проектированию заключается в интеграции в единый функциональный модуль двух или более элементов возможно даже различной физической природы. Соответственно на стадии проектирования из традиционной структуры машины исключается как минимум один интерфейс при сохранении физической сущности преобразования, выполняемого данным модулем.
В идеальном для пользователя варианте мехатронный модуль, получив на вход информацию о цели управления, будет выполнять заданное функциональное движение с допустимой погрешностью. Аппаратное объединение элементов в единые конструктивные модули обязательно сопровождают разработкой интегрированного программного обеспечения.
Программные средства обеспечивают непосредственный переход от замысла системы через ее математическое моделирование к управлению функциональным движением в реальном времени.
Применение мехатронного подхода при создании машин с компьютерным управлением определяет их основные преимущества по сравнению с традиционными средствами автоматизации:
• относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации элементов и интерфейсов;
• высокую точность сложных движений вследствие применения методов интеллектуального управления;
• высокую надежность, долговечность и помехозащищенность;
• конструктивную компактность модулей (вплоть до миниатюризации в микромашинах);
• улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
• возможность комплексирования функциональных модулей в сложные системы и комплексы под конкретные задачи заказчика.
План работы
Проанализировать с труктура мехатронного модуля и мехатронной системы

Рис.2. Структура мехатронной системы
Контрольные вопросы
1. Дайте определение термина «мехатроника».
2. Что такое мехатронный объект?
3. Каким мехатронным уровням может соответствовать технический объект? Приведите примеры.
4. Что такое «устройство»?
5. Мехатронность технических объектов, что это такое?
5. Какие основные принципы положены в основу построения мехатронных систем?
6. Какие устройства могут являться составной частью машин с компьютерным управлением движением?
7. Какие функции выполняет устройство компьютерного управления в мехатронной системе или модуле?
8. Объясните суть мехатронного подхода к проектированию.
9. Какие основные преимущества мехатронного подхода при создании машин с компьютерным управлением по сравнению с традиционными средствами автоматизации?
1. Подураев Ю.В. Мехатроника: основы, методы, применение [Текст]: учеб. пособие для вузов Серия: Для вузов/ М.: Машиностроение, 2006. – 256 с.
2. Юревич Е. И. Основы робототехники [Текст]: учеб. пособие для вузов / Юревич Е. И.; 2-е изд. - СПБ.: БХВ-Петербург,2005. - 416 с.
3. Шошиашвили М.Э., Шошиашвили И.С. Механика управляемых машин и мехатронных систем [Электронный ресурс]: учебное пособие [для вузов]. 2-е изд., доп. Юж.-Рос. гос. техн. ун-т (НПИ) – Новочеркасск: ЮРГТУ (НПИ), 2012. – 188 с.
4. Элементы мехатроники [Текст]: учеб. пособие/ Глебов Н.А., Булгаков А. Г., Гераськин Д. П.; Юж.-Рос. гос. техн. ун-т (НПИ). - Новочеркасск: Изд-во ЮРГТУ(НПИ), 2006. – 128 с.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.01)
Читайте также: