
Gm lan что это
Для работы с CAN шиной автомобиля необходимо знать:
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
3 Single Wire CAN или SW-CAN
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбит\с
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массе\земле.

Постараюсь писать на понятном языке, если где-то выражаюсь непрофессионально, прошу не пинать, я не гик в данном вопросе и с этой темой связан решением личных задумок и не более.

Источник
У нас есть 2 шины, высокоскоростная для «оперативных данных» (двигатель, безопастность) и низкоскоростная для данных не требующих высокой скорости (климат, мультимедиа). Хотя есть и третья LIN (местная связь) но она задействована в 2-3 местах не представляющих интереса, точнее 1 место очень интересное есть это связь блока ГУ с экраном и экрана с кнопками управления. Пока я туда не добрался.
Высокоскоростная шина CAN работает на 2х проводах, скорость 500 кбит/с
Низкоскоростная на 1 провода (землю не считаем) — 33.333 кбит/c
Как показала практика — многие данные в шинах перекликаются.
С чем его едят?
Изучение шины можно начать с любых кан адаптеров, но как правило их цена переваливает за 100$. Для простого увлечения инструмент не дешевый. Да и устройства с поддержкой 1 проводной шины стоят еще дороже. Пришлось лепить самому.
STM32
Я никогда до этого не сталкивался с микроконтроллерами, и по совету добрых людей начал изучение с STM32, и не жалею. Конечно вы можете выбрать другие контроллеры, но мои эксперименты реализованы на STM, в нем есть встроенный CAN контроллер и не требуется лишний чип с обвязкой (микросхема и обвес — лишние детали на плате). В добавок в этих чипах есть аппаратный USB, т.е. мы получаем в 1 кристале уйму решений, и цена таких чипов от 60 рублей за единицу.
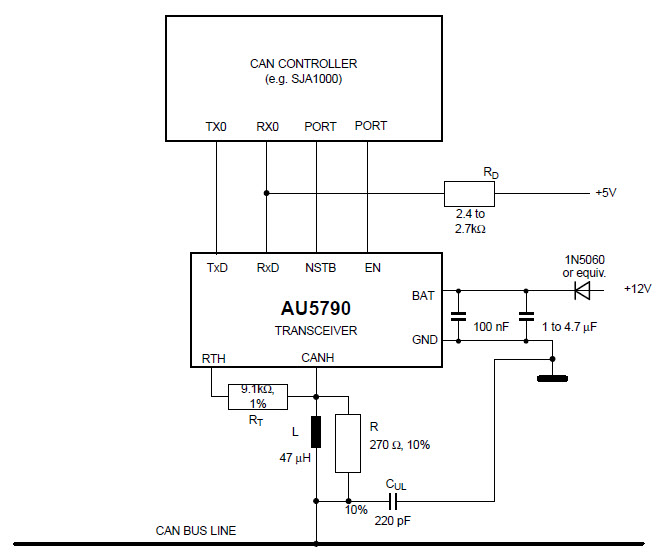
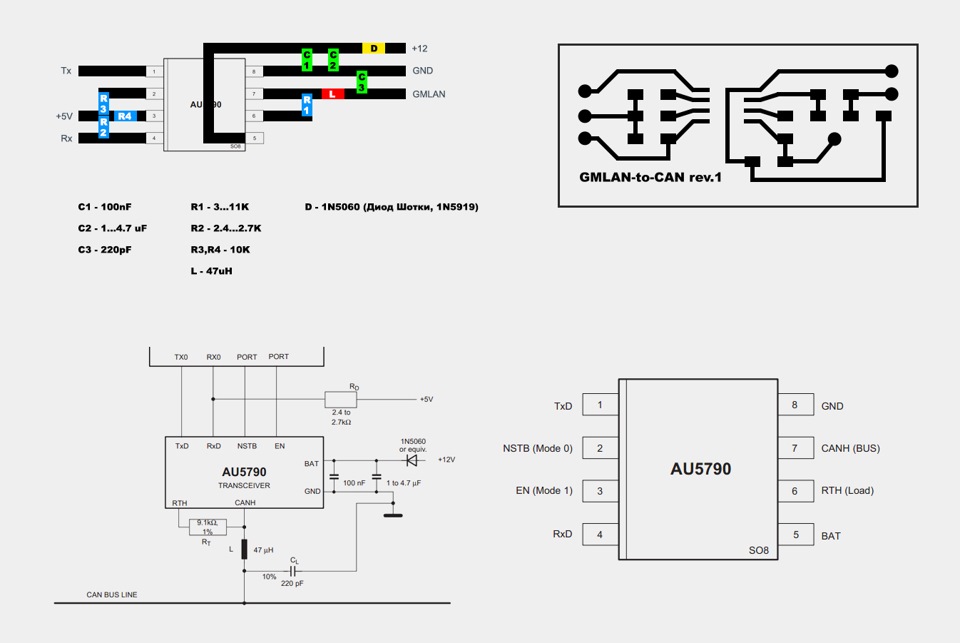
Для взаимодействия физического и логического уровня есть готовые решения, в виде трансиверов MCP2551 и тд. Для низкоскоростной шины предложений мало, я использую NXP AU5790. Аналоги можно найти в интернете.
Мой набросок печатной платы для изучения низкоскоротной шины на базе NXP AU5790:
Инструментарий
1. Компьютер (ноутбук)
2. Отладочную плату с МК (STM32F4 Discovery)
3. Трансивер и детали "обвеса"
5. Паяльник, олово, флюс
6. Все для печатных плат (текстолит, хлорное железо, принтер лазерный)
7. Прямые руки и свежую голову
Примечание: Ниже представлено общее описание различных шин последовательной передачи даных, используемых модулями управления GM для обмена информацией друг с другом. В Схемы обмена данными содержится информация о том, какие шины последовательной передачи даных сконфигурированы для конкретного автомобиля.
Описание цепи
В автомобиле имеется множество компонентов, использующих информацию от других источников, передающих информацию другим источникам, или выполняющих и то, и другое. Сети последовательной передачи данных обеспечивают надежный и недорогой способ "общения" различных компонентов автомобиля между собой и совместного использования информации.
Компания GM использует ряд различных шин связи для обеспечения своевременного и эффективного обмена информацией между модулями управления. Сравнивая эти шины друг с другом, можно отметить, что некоторые из них отличаются с точки зрения скорости, характеристик сигнала и режима работы. Примерами таких шин являются высокоскоростная шина GMLAN и низкоскоростная шина GMLAN.
Описание цепи высокоскоростной сети GMLAN
Высокоскоростная шина GMLAN используется в тех случаях, когда обмен данными должен происходить на достаточно высокой скорости, чтобы минимизировать запаздывание между моментом изменения показания датчика и получением этой информации управляющим устройством, использующим информацию для коррекции режима работы системы автомобиля.
Высокоскоростная сеть последовательной передачи данных GMLAN состоит из двух скрученных проводов. Одна сигнальная цепь обозначается как "GMLAN-High" ("GMLAN-Высокий уровень"), а другая сигнальная цепь обозначается как "GMLAN-Low" ("GMLAN-Низкий уровень"). На каждом конце шины данных между цепями GMLAN-High и GMLAN-Low имеется согласующий резистор 120 Ом.
Символы данных (единицы и нули) передаются последовательно со скоростью 500 Кбит/с. Данные, передаваемые по шине, представлены в виде разности напряжений между напряжением сигнала GMLAN-High и напряжением сигнала GMLAN-Low.
Когда двухпроводная шина бездействует, сигнальные цепи GMLAN-High и GMLAN-Low не активны, и это состояние соответствует логической "1". В таком состоянии обе сигнальные цепи имеют одинаковое напряжение 2,5 В. Разность напряжений составляет приблизительно 0 В.
Если требуется передать логический "0", сигнальная цепь GMLAN-High возбуждается до более высокого напряжения около 3,5 В, а цепь GMLAN-Low возбуждается до более низкого напряжения около 1,5 В. Разность напряжений становится равной приблизительно 2,0 (+/- 0,5) В.
Описание шасси цепи высокоскоростной сети GMLAN
Описание цепи графического интерфейса шины CAN (CGI)
В том случае, когда модуль информационного дисплея и модуль управления радиоприемником/кондиционером являются разными модулями управления, модуль информационного дисплея отвечает за передачу информации между радиоприемником и модулем управления радиоприемником/кондиционером. Панель управления радио обменивается данными только с модулем информационного дисплея, а модуль информационного дисплея затем обменивается данными с панелью управления радио/кондиционером через интерфейс локальной сети связи (LIN).
Когда требуется задействовать систему, сигнал вывода шины из спящего режима генерируется модулем радио или модулем информационного дисплея. Функция обмена данными графического интерфейса CAN включается или отключается в зависимости от уровня напряжения сигнала активизации интегрированной центральной консоли. Сеть будет оставаться активной, пока напряжение цепи поддерживается на низком уровне - не выше 1,5 В. Обмен данными будет запрещен при высоком напряжении цепи порядка 5,0 В.
Модуль радио может осуществлять горячий сброс модуля информационного дисплея, если модуль информационного дисплея не отвечает на запросы модуля радио. Сигнал сброса интегрированной центральной консоли – это выходной сигнал низкого уровня (менее 1,5 В), направляемый модулем радио модулю информационного дисплея, который имеет те же электрические характеристики, что и описанный выше сигнал активизации интегрированной центральной консоли.
Описание цепи среднескоростной сети GMLAN
Среднескоростная шина GMLAN очень сходна с высокоскоростной шиной GMLAN, но использует более медленную скорость передачи данных, равную 125 Кбит/с. Эта шина предназначена для использования в тех случаях, когда время реакции системы требует передачи большого объема данных за относительно короткое время - например при обновлении информации на графическом дисплее. Поэтому она обычно используется в информационно-развлекательных системах. Иногда требуется установить связь между низкоскоростной шиной GMLAN и среднескоростной шиной GMLAN. Это обеспечивается за счет использования радиомодуля (SilverBox) в качестве модуля-шлюза. Поскольку среднескоростная шина GMLAN и основная высокоскоростная шина GMLAN функционируют одинаково, методы их диагностики также аналогичны.
Описание цепи среднескоростной сети GMLAN
Низкоскоростная шина GMLAN применяется в тех случаях, когда не требуется высокой скорости передачи данных, что позволяет использовать менее сложные компоненты. Обычно она используется в функциях, управляемых оператором, когда требования ко времени реакции не такие жесткие, как при динамическом управлении автомобилем.
Низкоскоростная сеть последовательной передачи данных GMLAN состоит из единственного провода - шины, имеющей привязку к массе, с управляющим напряжением высокого уровня. Во время движения автомобиля по дороге символы данных (единицы и нули) передаются последовательно со стандартной скоростью 33,3 Кбит/с. Исключительно для целей программирования может использоваться специальный режим высокоскоростной передачи данных на скорости 83,3 Кбит/с.
В отличие от высокоскоростных двухпроводных сетей в однопроводной низкоскоростной сети не используются согласующие резисторы на концах сети.
Символы данных, передаваемые по шине, представляют собой сигналы различного напряжения на шине. Когда низкоскоростная шина GMLAN бездействует и не возбуждается, присутствует низкое сигнальное напряжение порядка 0,2 В. Такое состояние соответствует логической "1". Если требуется передать логический "0", сигнальное напряжение возбуждается до более высокого уровня порядка 4,0 В или выше.
Описание цепи сети местной связи (LIN)
Шина локальной сети связи (LIN) состоит из единственного провода и имеет скорость передачи 10,417 Кбит/с. Эта шина используется для обмена данными между главным модулем управления и другими интеллектуальными устройствами, выполняющими вспомогательные функции. Конфигурация такого типа не требует производительности или скорости высокоскоростной шины GMLAN или низкоскоростной шины GMLAN, и поэтому является относительно более простой.
Передаваемые символы данных (единицы и нули) представлены различными уровнями напряжения на шине связи. Когда шина LIN бездействует и не возбуждается, сигнал представляет собой напряжение высокого уровня, приблизительно равное напряжению аккумуляторной батареи Vакк. Такое состояние соответствует логической "1". Если требуется передать логический "0", сигнальное напряжение снижается почти до уровня массы (0,0 В).
Описание цепи активизации связи
Модули управления, присоединенные к сетям типа высокоскоростное сети GMLAN, за исключением среднескоростной шины GMLAN и шины графического интерфейса CAN, разрешают или запрещают передачу данных в зависимости от уровня напряжения в этой цепи. Если напряжение цепи имеет высокий уровень (около 12 В), передача данных разрешается. Если напряжение цепи имеет низкий уровень, передача данных запрещается.
Шина графического интерфейса CAN аналогичны, но в ней используются другие уровни напряжения. Описание шины графического интерфейса CAN см. выше.
Диагностический разъем (DLC)
Разъем передачи данных (DLC) является стандартизованным разъемом с 16 полостями. Конструкция и положение разъема соответствуют общим стандартам промышленности и обеспечивают следующее:
Замыкание на массу
Замыкание на напряжение питания
Низкоскоростная шина последовательных данных GMLAN
Заземление (DLC, клемма 5)
* При разрыве между клеммой 1 цепи последовательных на разъеме передачи данных или клеммой 5 цепи заземления и цепью ВСМ будет потеряна связь только с диагностическим прибором.
1. Нет связи с модулями низкоскоростной сети GMLAN.
Описание цепи/системы
Последовательные данные передаются через одинарный провод на соответствующие модули управления. Скорость передачи по низкоскоростной сети GMLAN - до 83,33 кб/с. В нормальных условиях работы скорость шины - 33,33 кб/с. Модули управления переключают цепь последовательных данных между 0-5 В при нормальных условиях обмена информацией. Для активации подсоединенного к низкоскоростной цепи последовательных данных GMLAN модуля отправляется импульс 10 В. Если данные утрачены, модули управления зарегистрируют код неисправности, означающий отсутствие связи на другом модуле. Диагностический код неисправности DTC пропадания последовательно передаваемых данных не означает неисправности модуля, который установил этот код.
Рекомендации по диагностике
Справочная информация
Указатель схем
Указатель видов разъемов
Описание и работа
Справочная информация по электрооборудованию
Тестирование цепи/системы
Примечание: Необходимо по схеме определить следующее:
-
Проверить связь со всеми модулями управления на низкоскоростной цепи GMLAN последовательных данных. См. Каналы обмена данными - Ссылки . Связь должна отсутствовать с двумя или более модулями на низкоскоростной цепи последовательных данных GMLAN.
Если не поддерживает связь только один модуль управления, провести диагностику только этого модуля. См. DTC U0100-U02FF .
Если не все модули поддерживают связь, см. Проверка цепи последовательных данных на обрыв/высокое сопротивление.
Если параметр превышает указанный диапазон, проверить на наличие обрыва/высокого сопротивления в цепи заземления.
Если значение больше заданного диапазона, проверить замыкание цепи последовательных данных на напряжение питания. См. Тестирование цепи последовательных данных на замыкание на напряжение питания.
Если значение меньше заданного диапазона, проверить замыкание цепи последовательных данных на землю. См. Тестирование замыкания на землю в цепи последовательных данных.
Если параметр больше заданного диапазона, проверить отсутствие обрыва/высокого сопротивления в цепи последовательных данных. Если проверка цепей прошла нормально, замените комплект для сращивания проводов.
Тестирование цепей последовательных данных на замыкание на напряжение питания
- Зажигание выключено, отсоединить разъем жгута проводов от следующих компонентов:
Если значение больше заданного диапазона, устранить замыкание на напряжение питания.
Если значение больше заданного диапазона, выполнить проверку, как описано ниже:
Тестирование замыкания на землю в цепи последовательных данных.
- Зажигание выключено, отсоединить разъем жгута проводов от следующих компонентов:
Если значение отличается от требуемого, устранить замыкание на землю.
Если значение меньше заданного диапазона, выполнить проверку, как описано ниже:
Тестирование цепи последовательных данных на отсутствие обрыва/высокого сопротивления
- Если имеется второй комплект для сращивания проводов, проверить, при включенном зажигании, есть ли связь между диагностическим прибором и одним или несколькими модулями управления, подключенными ко второму комплекту для сращивания проводов.
Если на втором комплекте для сращивания проводов не поддерживает связь ни один модуль управления, проверить наличие обрыва/высокого сопротивления в цепи последовательных данных между первым комплектом для сращивания проводов и вторым комплектом для сращивания проводов. Если проверка цепей прошла нормально, проверить второй комплект для сращивания проводов на обрыв/высокое сопротивление. Если проверка комплектов для сращивания прошла нормально, замените любой модуль или компонент, которые могут находиться между этими двумя комплектами.
Если на третьем комплекте для сращивания проводов не поддерживает связь ни один модуль управления, проверить наличие обрыва/высокого сопротивления в цепи последовательных данных между вторым комплектом для сращивания проводов и третьим комплектом для сращивания проводов. Если проверка цепей прошла нормально, проверить третий комплект для сращивания проводов на обрыв/высокое сопротивление. Если проверка комплектов для сращивания прошла нормально, замените любой модуль или компонент, которые могут находиться между этими двумя комплектами.
Если какой-либо из модулей управления не поддерживает связь, проверить каждую секцию цепи последовательных данных на обрыв/высокое сопротивление. Если проверка цепей прошла нормально, заменить модуль управления, который при подключении не поддерживает связь.

Приборка, в принципе, самодостаточна, уже можно было бы начать изучение низкоскоростной GMLAN-шины. Но, я решил еще подключить и блок кузовного оборудования (BCM). Этот блок кроме низкоскоростной шины работает по высокоскоростной двупроводной, которая выводится на разъем диагностики на пины 6 и 14 — более того, диагностика GM MDI видит его только по этим пинам, что удалось подтвердить, когда я на скорую руку попробовал подключить блок буквально парой проводов. Да, и оказалось, что этих пары проводов недостаточно. Вот, что я в итоге подключил (выводы перечислены в виде разъем/пин):
X2/22 — GMLAN вход, идут на одну линию разъемом диагностики и приборки
X7/23 — GMLAN выход на другие блоки (не подключал, просто записал)
X2/24 — CAN-H => 6й пин на разъеме диагностики
X2/23 — CAN-L => 14й пин на разъеме диагностики
X3/5 — зажигание. Оно же потом раздаётся на пины X4/22 и X4/23, если верно понял. Можно подключить приборку сюда, чтоб включалась только вместе с BCM.
X3/6 — зажигание.
Схемы 2546283RU и 2546303RU:
X1/1 — земля
X1/2 — питание
X1/3 — питание
X1/4 — питание
X2/1 — питание
X2/2 — земля
X2/3 — питание
X2/4 — питание
X5/3 — питание
X5/4 — питание
X3/22 — выход 5V
X3/15 — земля для замыкания с 5V через 1.3кОм резистор для эмуляции наличия ключа в замке, если правильно понял
Схема 2546329RU — подключил блок управления иммобилайзером:
X3/1 — земля, 1й пин на блоке иммо
X3/2 — сигнальный, 2й пин на блоке иммо
X3/3 — питание, 3й пин на блоке иммо
X4/26 — земля
X4/20 — питание
X1/24 — GMLAN(-)
X1/25 — GMLAN(+)
X6/18 — GMLAN (+) (перемычка на X6/24)
X6/19 — GMLAN (-) (перемычка на X6/25)
X6/24 — GMLAN (+)
X6/25 — GMLAN (-)
Включаем — первое, что обнаруживаем, приборка зажигает лампочки иначе и перестала показывать пробег. Значит, связь у нее с BCM есть, но вины у них отличаются (жаль, что не от одной машины). Попутно еще стало показывать напряжение "бортовой" сети, и что датчики колес уже обучены, а не в поиске. Пробуем диагностику — ничего не видит. Еще раз все проверил, попутно заменил страшные связки резисторов для имитации кнопок на тройку подстроечных и вспомнил, что для высокоскоростной шины требуется терминирующий резистор 120 Ом — вешаем его между линиями 6 и 14 разъема диагностики. Получилась такая вот картина:

Крупным планом бредборд и "имитация кнопок":
И блок иммо — думал, что пропишу ключ или хотя бы разберусь в процедуре его считывания, но быстро разобраться пока вышло:
Сегментация CAN шины по функциональному назначению
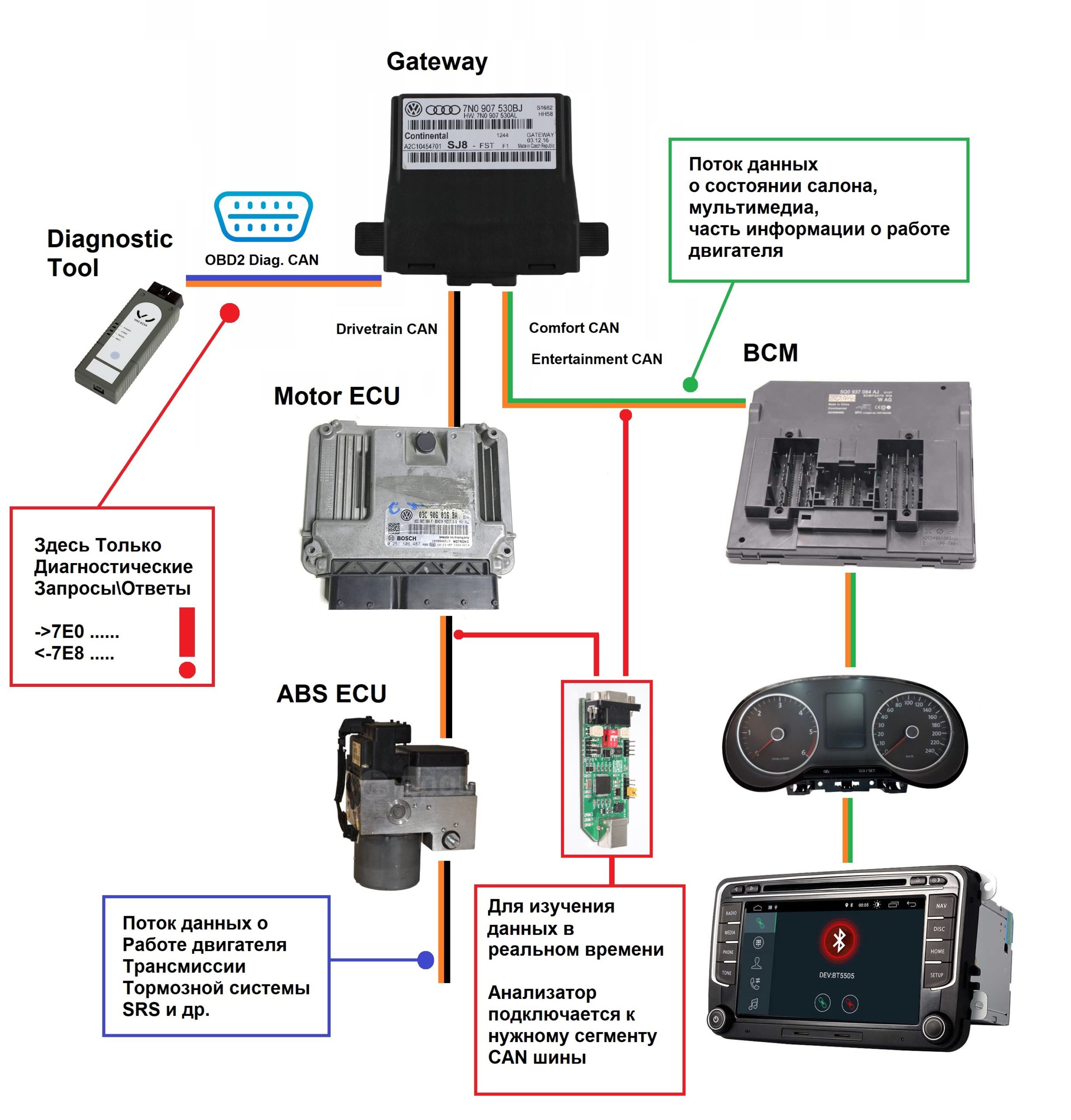
- Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
- В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
- Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
- ВАЖНО: На многих автомобилях (особенно VAG, MB, BMW) CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея, поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем гейтвеем оборудованы автомобили японских марок с 2016..2018 годов в зависимости от модели.
- ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Скорости работы CAN шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Мотор\шасси – 500 кбит\с, Комфорт – 100 кбит\с и с 2018 года шина Комфорт может иметь скорость 500 кбит\с., Диагностика: 500 кбит\с.
- BMW : Мотор\Шасси – 500кбит\с, Комфорт – 100 кбит\с и с 2018 года шина Комфорт может иметь скорость 500 кбит\с., Диагностика: 500 кбит\с.
- Mercedes-Benz : Мотор\Шасси – 500 кбит\с, Комфорт 83.333 кбит\с, 250 кбит\с, Диагностика: 500 кбит\с.
- Ford, Mazda : Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с. (Для Ford может быть больше вариантов)
- KIA\Hyundai : Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с, 500 кбит\с, Мультимедиа: 125 кбит\с, 500 кбит\с., Диагностика: 500 кбит\с.
- GM : Мотор\Шасси – 500 кбит\с, Комфорт: 33.333 кбит\с, 95.2 кбит\с, Диагностика: 500 кбит\с.
- Toyota, Nissan, Honda, Subaru, Suzuki : 500 кбит\с (может использоваться гейтвей)
- Mitsubishi : Мотор\Шасси: 500 кбит\с, Салон\Комфорт – 83.333 кбит\с, 250 кбит\с, Диагностика: 500 кбит\с.
- Volvo : Мотор\Шасси: 500 кбит\с, Салон\Комфорт – 500 кбит\с, 125 кбит\с, Диагностика: 500 кбит\с.
- Renault : 500 кбит\с
- Peugeot : Мотор\Шасси – 500 кбит\с, Комфорт 125 кбит\с.
- Lada : 500 кбит\с
- Коммерческая и специальная техника : Стандарт J1939 250 или 500 кбит\с.
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
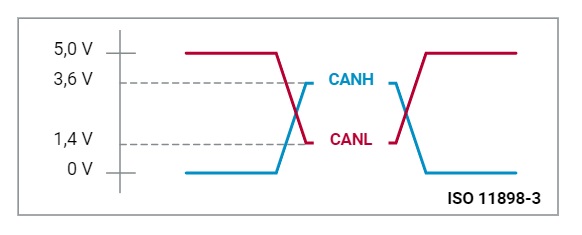
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.
В этом случае уровни на шине CAN выглядят так:
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбит\с и выше. (Но могут быть исключения) .
В этом варианте используется та же витая пара, но линии CAN-Low и CAN-High подтянуты к напряжению питания и массе соответственно.
Подробное описание FT-CAN по ссылке
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбит\с.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Подробнее в нашей статье о FT-CAN – ссылка.
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети Салон\Комфорт\Мультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
Читайте также: