
Flysky th9x подключение к компьютеру
И снова здравствуйте, дорогие друзья! Сейчас мы будем подключать самый распространённый приемник радиоуправления (РУ) Turnigy 9X (она же Avionix AV-TH9B/FlySky/iMax возможно еще как-то называется) с родным радио модулем к контроллеру, а далее настраивать аппаратуру для работы с APM.
Внимание! Для корректной работы контроллера и его функций (Fail safe) первым делом надо прошить PPM-encoder.
Из первоначальной настройки аппаратуры отмечу, что необходимо создать модель с предустановкой «Самолет» (вертолет не выбираем, т.к. там используются миксы, которые нам все испортят).
- 1-4 — каналы управления креном, тангажом, газом и рысканием.
- 5 — канал переключения режимов.
5-й канал подключаем сразу, но пригодится он чуть позже. Описание настройки аппаратуры Turnigy 9x с разными прошивками будет представлено в следующих статьях. Подключение производим 1 к 1, а именно: 1-5 каналы приемника на 1-5 каналы Input контроллера. Питание приемника берем с контроллера. Подключение приемника к контроллеру
Хочу обратить Ваше внимание, что достаточно соединить только сигнальные пины и отдельно питание. Да, можно использовать коннекторы JR (стандартный контакт на сервомашинках или регуляторах) и как все привыкли втыкать их в каждый канал, но можно воткнуть например так: первую фишку JR втыкаем как положено (S + -) этим Мы пробросим питание на приёмник и сигнал с приёмника к контроллеру, далее второй соединительный провод втыкаем так чтобы фишка JR захватывала сигнальные пины приемника [2,3,4] канала и соответственно так же втыкаем фишку JR в контроллер, вход на сигнальные пины. Только делайте это внимательно не перепутайте каналы!
Были замечены случаи, когда приёмнику не хватало питания от контроллера, в этом случаи используйте сторонний источник питания для приемника, например от ESC или BEC. Если Вы используете отдельные источники питание для систем летательного аппарата следите за тем, что бы у Вас не произошло замыкание разных источников питания. То есть если вы подали питание от источника №1 к контроллеру и от источника №2 к приёмнику, приёмник и контроллер соединяются только сигнальными пинами.
Подключение завершили и можно переходить к настройке аппаратуры. Об этом в следующих статьях.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.

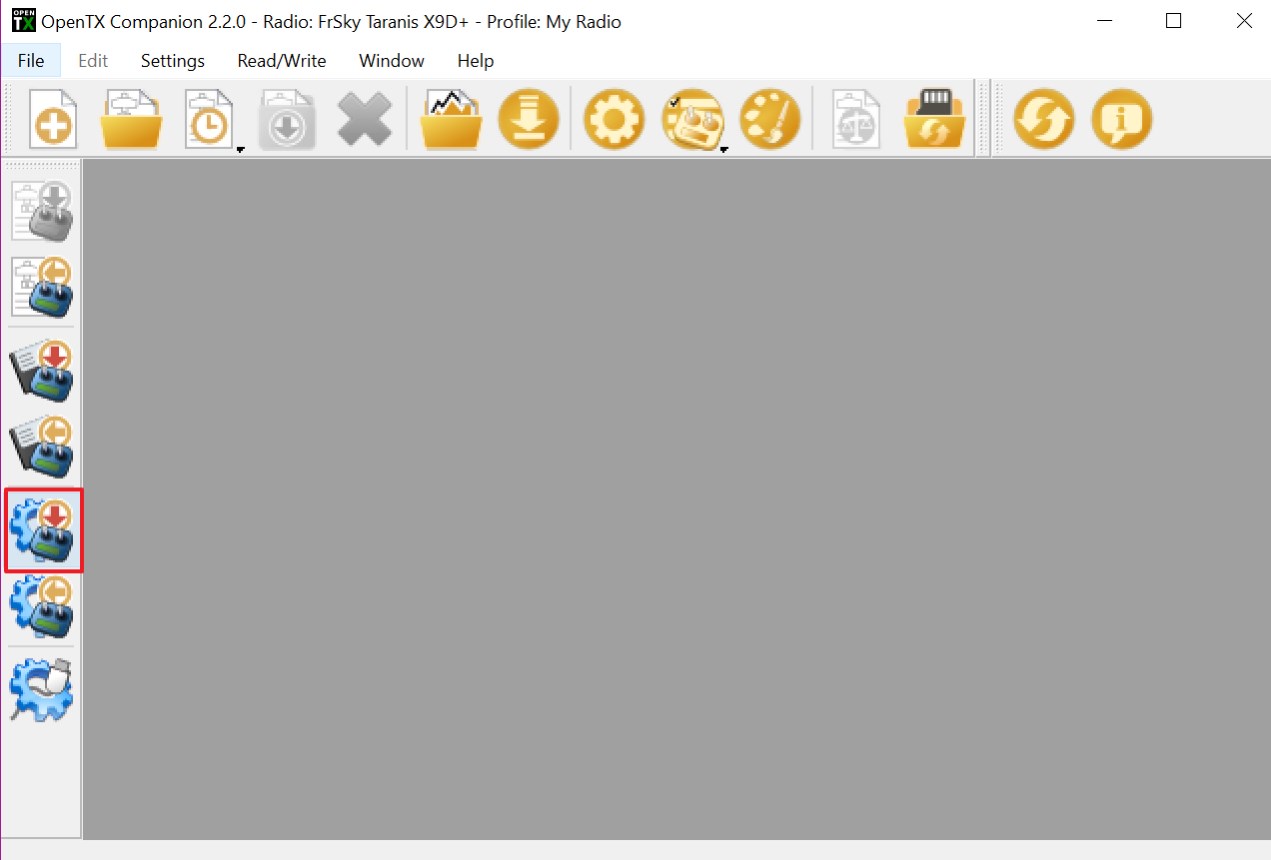
В этой статье мы рассмотрим с вами вопрос — как подключить Taranis и FlySky к Windows 10 и симулятору.
Сначала рассмотрим подключение Taranis.
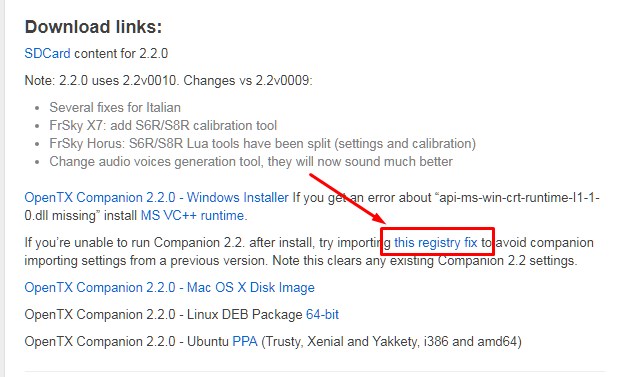
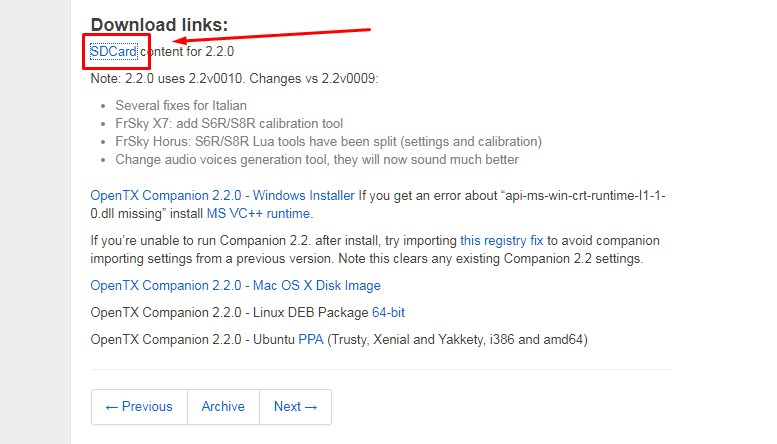
Где скачать прошивку для Multiprotocol TX Module?
На сайте можно выбрать нужную вам аппаратуру и ниже подгрузится список необходимых прошивок. Также есть фильтр параметров.
В данной статье рассмотрим возможность управления режимами полета коптера с контроллером APM при использовании аппаратуры радиоуправления Turnigy 9x «из коробки» со штатной прошивкой.
Рассмотрим два способа организации управления режимами коптера при подключении «штатной» аппаратуры Turnigy 9x. Первым можно обеспечить работу 2х режимов, а вторым уже 6 из 6 максимально возможных.

1) Самым простым способом является назначение переключателя на пятый канал. На стандартной прошивке возможно использовать переключатель «Thr. cut» для этих целей. Переключатель для 5 канала
Делаем следующую процедуру:
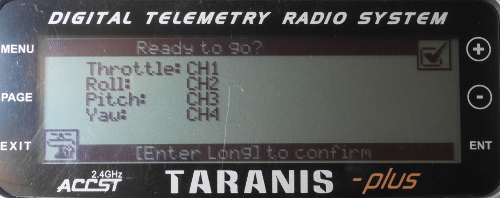
Включаем аппаратуру радиоуправления, проверяем, что выбрана модель «Самолет».

Очищаем все миксы в аппаратуре, которые могли использовать раньше. Первое окно после включения

Переходим в настройки и доходим до пункта «REVERSE». Инвертируем канал тангажа (pitch) «ELE«. Инвертирование тангажа
Делаем проверку показаний. Стик тангажа опускаем вниз, на экране «Display» показание увеличится (вправо), также в Mission Planner должны увидеть увеличение уровня сигнала:


Переходим в настройки и доходим до пункта «AUX-CH».



Далее в строке «CH5» находим «THRO HOLD» и сохраняем, нажав кнопку «Menu». THRO HOLD
Далее переходим к пункту Display настроек и пробуем пощелкать переключатель. Должны увидеть следующее поведение:



Проверим реакцию контроллера APM на изменение положения переключателя. Для этого в окне калибровки аппаратуры посмотрим на изменения уровней сигнала пятого канала: Уровень сигнала 5 канала
На данном этапе мы выполнили подготовку к работе переключателя на два полетных режима. Разумеется этого мало, и поэтому лучше использовать второй способ для настройки переключателей для 6и режимов.
2) Второй способ более хитрый. Работа пятого канала организована миксами в программе аппаратуры, чтобы можно было обеспечить выход сигнала от нескольких переключателей на один канал.
Будем использовать трехпозиционный переключатель «F.MODE» совместно с одним из двухпозиционных «GEAR» или «THRO HOLD». Нам необходимо получить на выходе значения импульсов: 1165, 1295, 1425, 1555, 1685 и 1815. Значения мы будем смотреть/контролировать в окне калибровки аппаратуры в Mission Planner — 5й канал. Значения могут немного отличаться от представленных, но тут нет ничего страшного, т.к. диапазон достаточный. Также возможны колебания.
Делаем следующую процедуру:
Включаем аппаратуру радиоуправления, проверяем, что выбрана модель «Самолет».
Очищаем все миксы в аппаратуре, которые могли использовать раньше.
Устанавливаем расходы в +-100% и тримеры/субтримеры в ноль для каналов 5 и 6.
Если сделали сброс всех настроек, то необходимо опять настроить инвертирование тангажа (см. выше).
Подключаем 6 канал приемника к 5 каналу платы APM. Пятый канал оставляем не подключенным. Делаем именно так, а никак иначе (из-за использования миксов).
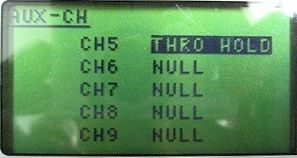
Переходим к меню «AUX-CH» и устанавливаем «THRO HOLD или «GEAR» (на выбор, далее буду писать «THRO HOLD») для «CH5». Выбранный переключатель в дальнейшем можно будут изменить, если потребуется. Вместо «CH5» можно использовать остальные, но только не «CH6». Выбор переключателя
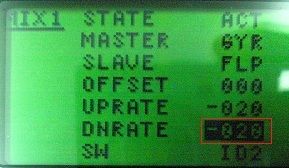
Переключите «F. MODE» в позицию «2» и «THRO HOLD» в положение от себя. Перейдите в меню миксов «MIX1», измените «DNRATE» так, чтобы в Mission Planner у пятого канала стало значение «1555».
Настройка Mix1
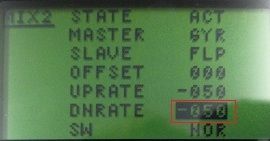
Переключите «F. MODE» в позицию «N» и «THRO HOLD» в положение от себя. Перейдите в меню миксов «MIX2», измените «DNRATE» так, чтобы в Mission Planner у пятого канала стало значение «1685». Настройка Mix2

Переключите «F. MODE» в позицию «1» и «THRO HOLD» в положение от себя. Перейдите в меню миксов «MIX3», измените «DNRATE» так, чтобы в Mission Planner у пятого канала стало значение «1815». Настройка Mix3
На данном этапе мы завершили настройку миксов для второго способа. Если в ходе настройки необходимо отменить последний пункт, пока его не сохранили кнопкой «Menu», можно отменить действие кнопкой «Exit».
После окончания настройки еще раз необходимо пощелкать переключатели и в Mission Planner посмотреть, чтобы при каждом переключении было свое значение показаний пятого канала.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Как собрать (скомпилировать) свою прошивку для модуля?
- Перейдите на страницу Протоколы (гитхаб) и выберите те, которые вам нужны.
- Выберите модуль, который вас интересует (на Atmega328 всего один, если вам не нужны все протоколы), рекомендуем покупать модули на базе STM32:
Какие протоколы нужно загрузить в мультипротокольный TX модуль?
Если в модуле установлен ATmega328, то у него памяти всего 32 кб, а это значительно меньше, чем требуется для охвата всех протоколов. Поэтому, вам нужно будет выбрать, какие именно протоколы вы скомпилируете в прошивку.
К счастью, процесс выбора и компиляции очень прост и полностью описан на странице Программирование и компиляция на ГитХабе.
Если вам нужны все протоколы, то нужно использовать модуль с микроконтроллером ARM STM32.
Проблемы в симуляторе, неправильный полет и другие проблемы
Здесь ничего особенного не сделать, так как проблема в самой игре. Попробуйте скачать другой симулятор или покопаться в настройках: возможно, нужно будет инвертировать стики или уменьшить мертвую зону стиков. В общем, смотрите настройки конкретного симулятора.
Модель симулятора настроена не верно
Если вы пропустили шаг с настройкой дополнительной модели для симулятора в Таранисе, то у вас могут возникнуть проблемы при подключении к ПК. Сделайте все шаги из пункта «Подготовка и настройка Taranis для подключения к Windows 10», а также проверьте, что значения установлены на 50, а не 51, например.
Проблемы с USB, ПК не видит пульт
Некоторые кабели могут не подходить, попробуйте другой. Проблема может быть только в неподходящем кабеле, во всех других случаях ПК всегда увидит пульт. Возможно, у вашего кабеля нет контактов для обмена данными, а только для питания (+ и -), это если вы используете кабель от зарядника. Чтобы проверить, годится ли кабель для передачи данных, подключите с помощью него плеер или телефон и попробуйте перекинуть какой-нибудь файл. Если получилось, значит, кабель подходит.
Проверка настроек Taranis в Windows
Ничего особенного делать для подключения не нужно. Просто подключите пульт к компьютеру и Win 10 сама установит драйвера.
Далее пройдите в меню (пуск) и выберите (либо введите в поиске) «Устройства и принтеры». Найдите игровое устройство, скорее всего, оно будет называться «FrSky Taranis Joystick» или «8 axis 8 button device» и выглядеть примерно так:
Нажмите правой кнопкой мыши по значку и выберите «Настройки игрового контроллера». Выберите Taranis и нажмите «Свойства». Откроется окно с индикаторами. Подвигайте все стики и переключатели на пульте — точные движения должны повторяться и в этом окне:

Готовая прошивка Multiprotocol TX Module
Прошивка для мультипротокольного TX модуля — это открытый исходный код, а это значит, что прошивку дорабатывают такие же люди, как мы с вами и делать это может любой желающий (но не все конечно же попадет в релиз).
В качестве примера того, что меняется в прошивке: в версии v1.2.1.83 разработчики добавили автоматическую настройку радиочастоты во время привязки приемников FrSky, а в версии ранее — добавлен анализатор спектра 2.4GHz, который доступен в OpenTX версии 2.3 и новее.
Подключение приемника
Прежде чем настраивать квадрокоптер, нужно привязать к нему приемник FlySky. Для этого подключите разъем приемника к полетному контроллеру и подключите аккумулятор к дрону. Не забудьте снять пропеллеры перед этими действиями! Если вы правильно подключили приемник к контроллеру, то на нем замигает светодиод. Теперь включите пульт. Пульт начнет пищать, сообщая о том, что сигнала нет, но через пару секунд перестанет, значит он поймал сигнал с приемника.
Также, если вы не знаете, как подключать провода от полетного контроллера к приемнику, посмотрите это видео:
Установка и настройка FlySky FS-iA6B и FS-iA10B
Betaflight поддерживает PWM-приемники, но я настоятельно рекомендую купить приемник, который работает по протоколу iBUS.
iBUS — это цифровой протокол, такой же как SBUS, но у него меньше задержки и более высокая точность сигнала управления, а также его немного легче установить, за счет минимального количества проводов.
В настоящее время на рынке есть два приемника FlySky, которые поддерживают iBUS:
FS-iA6B и FS-iA10 — этот приемник (ресивер) для полетов на гоночных квадрокоптерах. Они компактные, их легко можно установить в мелкий дрон, у них крепкий корпус, но антенные не съемные.
Отличие FS-iA6B от FS-iA10 лишь в том, что в первом 6 каналов связи, а во втором — 10 каналов. Для гоночного квадрокоптера будет достаточно 6 каналов (4 управление, 1 канал на переключался режимов полета и 1 канал на пищалку для поиска дрона в траве). 10 канальные приемники используют чаще на съемочных самосборных квадрокоптерах, либо, если на гоночный вешают ненужные для гоночного датчики, типа GPS и т.д. и чтобы их включать, нужны дополнительные каналы.
A8B — этот приемник имеет правый форм-фактор, и зато съемная. Эти приемники без корпуса и требуют защиты.
Приемник FS-iA6 и FS-iA10, который поставляется со многими аппаратурами FlySky i6 и i10, в настоящее время не поддерживает iBUS. Это исправят в ближайшем будущем с релизом новой версии Betaflight 3.1. Это потребует сделать небольшую модификацию приемника, но это стоит сэкономленных денег. Приемник подключается к порту UART на полетном контроллере, и кстати, его можно установить в любой UART, так как он не требует последовательности, в отличии от SBUS. Однако, вы не должны подключать ваш приемник IBUS к выходу с надписью «SBUS». В этой статье я буду подключать приемник к порту UART3.


FS-iA6B и FS-iA10B имеет два порта iBUS, расположенных на верхних шести контактах приемник. Слот «SENS» предназначен для подключения телеметрии в FS-iA6B и FS-iA6B. Телеметрия iBUS еще не поддерживается в Betaflight, но она есть. Слот «SERVO» — это выход iBUS от приемника, к которому подключается сервопровод, выходящий из полетного контроллера.

Здесь он стоит боком, но можно поставить и нормально, смотря сколько у вас там места есть.
Переплет и настройка переключателей режимов Прежде чем настраивать свое радио, вам нужно привязать к нему приемник FlySky. Для этого вам нужно включить питание вашего квадроцикла с подключенным штекером, вставленным в приемник. Сначала удалите реквизиты и подумайте о том, чтобы использовать устройство дымоудаления, если это первый раз, когда вы включаете квадроцикл.
Какой тип интерфейса для соединения с аппаратурой управления выбрать? PPM или Serial?
Multiprotocol TX Module поддерживает стандартный интерфейс PPM, который работает со всеми передатчиками, к которым можно подключиться через:
- Модульный отсек (RF);
- Порт тренера;
- Любой порт PPM, который свободен внутри аппаратуры.
Если у вас аппаратура управления, которая поддерживает прошивки er9X / erSky9X или OpenTX (Frsky Taranis, Horus или FlySky TH9X или семейство Turnigy 9X), то у вас есть возможность использовать Serial порт. Для использования интерфейса Serial (последовательный порт) не требуется какая-либо модификация оборудования, но возможно понадобится обновление прошивки на аппаратуре управления.
Несколько преимуществ использования Serial:
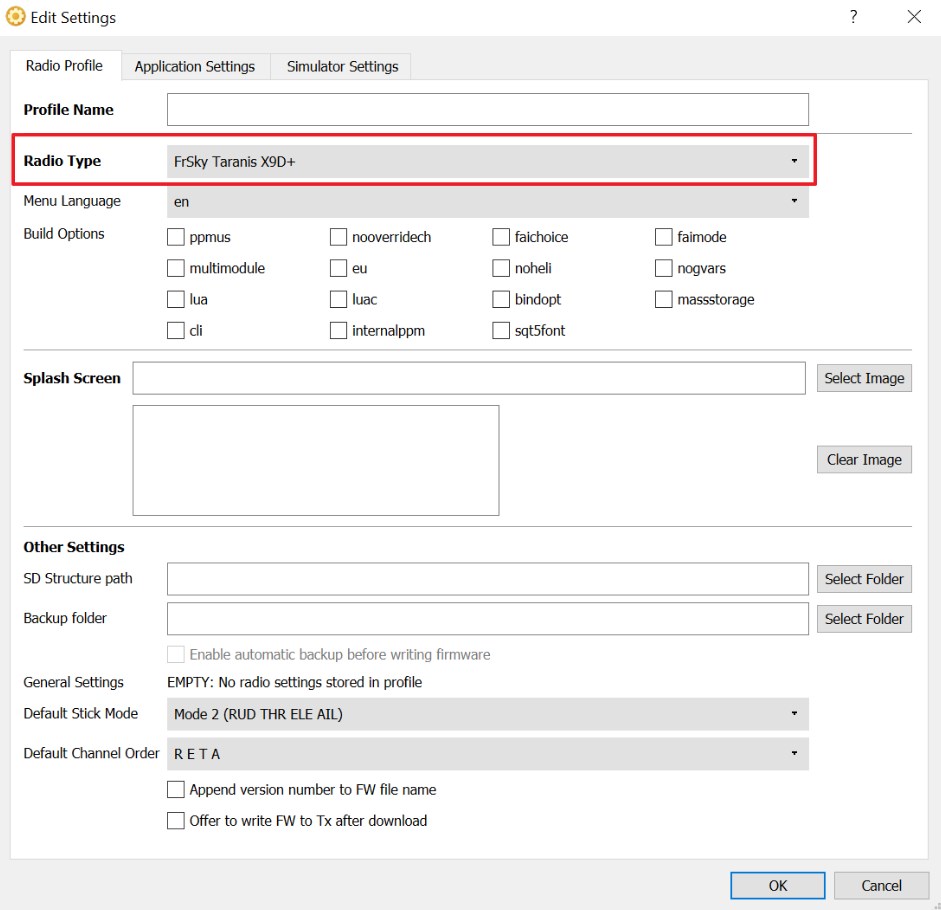
Подготовка и настройка Taranis для подключения к Windows 10
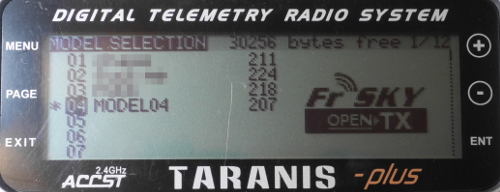
Сначала нажмите MENU. Затем нажмите кнопку Минус (-) и прокрутите вниз до пустого слота.
После того, как дойдете до пустого места, нажмите и удерживайте Enter (ENT). Выберите «Create Model» и еще раз нажмите ENT. Далее, кнопками плюс и минус выберите картинку квадрокоптера и снова нажмите ENT.
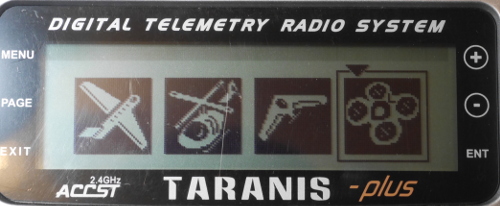
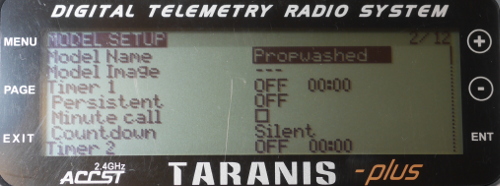
Теперь нажмите кнопку PAGE 4 раза, пока не дойдете до этого меню:
Далее нажмите и удерживайте ENT, пока не появится еще одно меню и будет возможность добавить новую модель:
Выберите новую строчку модели и удерживайте PAGE, затем поменяйте название на то, которое вам нравится. Если во время выбора букв нажать и удерживать ENT, то буква станет заглавной. После ввода названия нажмите EXIT.
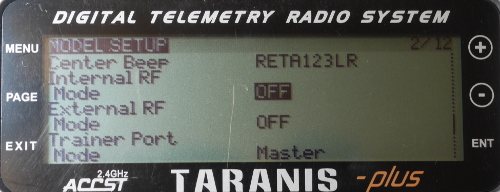
Далее прокрутите вверх, используя +, там вы увидите строчки Internal и External RF — они должны быть в значении OFF. Это нужно, чтобы не включать радио, пока пульт подключен к компьютеру. Если у вас оно ON, то выберите строчку, нажмите ENT, затем минус (-) и снова ENT.
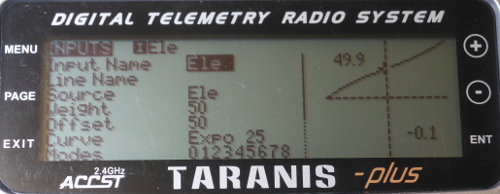
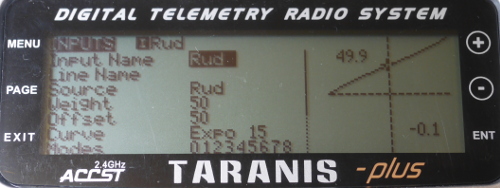
Далее нажмите кнопку PAGE. Вы перейдете на страницу Inputs (5 из 12). Там будет примерно такое:
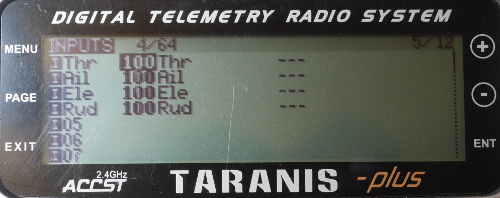
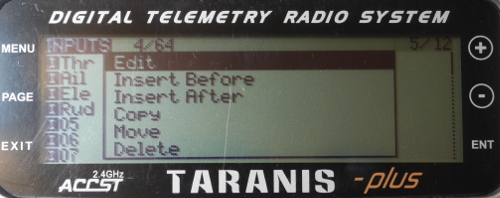
По умолчанию здесь все параметры имеют диапазон 100, но нам нужно сделать везде 50. Для этого выбираем Thr, жмем ENT, здесь увидите меню, жмем ENT еще раз (получается, что мы активируем Edit, т.е. редактирование).
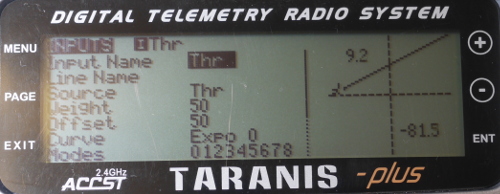
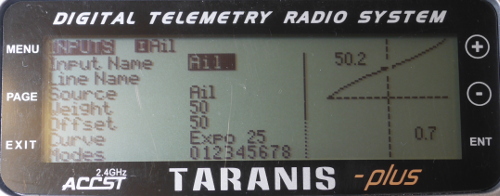
Далее, выставляем значение 50 у Weight и Offset. Справа будет график и при изменении цифр он тоже будет меняться. Аналогичные действия нужно сделать для 3 остальных настроек.
Чтобы вам было более понятно, можете посмотреть видео одного автора:
Настройка iBus в Betaflight
В настройке нет ничего сложного. Для начала, всегда снимайте пропеллеры, зачем подкючаем по USB дрон к компьютеру, запускаем Betaflight и нажимаем Connect.
- Переходим во вкладку «Ports», там включаем Serial RX, на том порту (порты слева UART1,2,3), к которому вы подключили. Как это понять? Посмотрите схему вашего полетного контроллера, там все порты будут с подписями.
Нажимаем Save and Reboot - Переходим во вкладку «Configuration». Выбираем «RX_SERIAL» в блоке «Receiver Mode», а также выбираем «IBUS» в блоке «Serial Receiver Provider».
Снова нажимаем Save and Reboot. - Далее переходим во вкладку «Receiver». В блоке «Channel map» выбираем «Futaba» или «AETR1234». Это стандартные протоколы и их менять обычно не нужно.
Жмем Save. - Теперь убедитесь, что все переключатели работают (а также переключатели снятия с охраны и переключатели режимов полета), они должны быть на отметке 1500, кроме газа, газ должен быть на 1000, когда стик находится в нижнем положении. Подробнее, как сделать так, чтобы все значения были на отметке 1500, можете почитать в этой стать: Betaflight configurator, настройка на русском.
Связывание FS-iA6B и FS-iA6B с пультом
На приемниках с штыревыми разъемами, имеющими порт «bind», вам нужно будет использовать подключаемый штекер, поставляемый с ресивером, чтобы TX и RX могли разговаривать друг с другом. При вставленном штепсельной вилке приемник загрузится быстро мигающим светом. Это означает, что он находится в режиме привязки. Чтобы связать свой FS-i6 и FS-iA10B с ним, включите TX, удерживая кнопку привязки. Процесс привязки произойдет немедленно, и RX (приемник) будет медленно мигать, показывая, что привязка успешно выполнена. В этот момент вы должны удалить свою привязку.
Проблемы и неисправности с Taranis в Windows
Строение и функции Multiprotocol TX Module
Давайте рассмотрим, из чего состоит модуль и какие выполняет функции.
- Мультипротокольный модуль (Multiprotocol TX Module) подключается к главному передатчику (пульту). Модуль обычно состоит из:
— микроконтроллер. На сегодня это ATMega328P или STM32. Микроконтроллер взаимодействует с модулем, передает команды на аппаратуру в аппаратный RF разъем. Для связи с приемником модели, радиочастотный чип в TX модуле должен соответствовать радиочастотному чипу в приемнике.Обычно, поддерживаются 4 наиболее популярных радиочастотных чипа: TI CC2500, Nordic NRF24L01, Cypress CYRF6936 и Amiccom A7105. - Прошивка загружается в микроконтроллер и выполняет несколько функций:
— взаимодействует с сигналами от TX и декодирует их для передачи в приемник модели;
— управляет процессом связывания;
— с некоторыми протоколами, такими как у DSMX и FrSky, модуль умеет обрабатывать информацию телеметрии и передавать ее в аппаратуру управления. - Физическая антенна 2.4GHz.
Одной из наиболее интересных функций TX модулей является обработка и передача в аппаратуру управления информации телеметрии и работает эта функция со всеми протоколами, которые поддерживают прием/передачу телеметрии.
Настройка FailSafe
Важная функция — настройка того, что будет делать дрон, если произойдет потеря сигнала с аппаратуры управления.
Посмотрите на значение Receiver, какое там будет значение:
В нижнем положении стика Газ эта цифра не должна быть выше значения 1000. Если оно выше, читайте статью по ссылке выше или уменьшите это число через меню настроек в пульте.
Теперь нам нужно настроить пульт так, чтобы при выключении пульта или потери сигнала, приемник на дроне дал команду контроллеру на снижение оборотов двигателей. Заходим в меню пульта в «End Point», выбираем канал Ch3 и кнопкой ОК увеличиваем значение до 101%:
Нажимаем Cancel и удерживаем для сохранения настроек. Теперь идем в бетафлай и проверяем значение (раздел Receiver). Поднимаем до упора стик газа и опускаем до самого низа. Значение должно быть немного ниже 1000, например 996.
Теперь возвращаемся в меню «System Setup». Выбираем «RX Setup» и потом «Failsafe»:
Выбираем « Channel3″ с помощью кнопок Up и Down сделайте -101% как на картинке выше, нажимаем OK. Снова идем в бетафлай и проверяем, какие у нас там будут цифры. Если значение больше 1000, то в «End Point» увеличиваем значение до 102%.
Далее, в Betaflight Configurator нужно настроить сам режим FailSafe, для этого включаем режим эксперта, эта кнопка находится здесь:
Далее, переходим во вкладку «FailSafe», и в блоке «Valid Pulse Range Settings» ставим значение «996»:
Нажимаем Сохранить и перезагрузить.
Теперь нужно убедитсья, что файлсэйф работает, для этого переходим во вкладку Receiver, включаем аппаратуру и дрон и смотрим на значение газа, оно должно быть 1000. Теперь отключаем пульт, значение газа должно стать 996.
Вот и все, вы настроили FailSafe. Теперь, при потере связи, дрон будет падать, либо опускаться, а не лететь дальше, пока аккумуляторы не сядут.
Если вы повредили антенны этого приемника и вам нужно их поменять, тогда прочитайте эту статью: Как поменять антенны приемника fs-ia6b и fs-ia10b
Мультипротокольный TX модуль, или мульти-модуль (с англ. Multiprotocol TX Module) — это внешний модуль передатчика (пульта) 2.4GHz, с помощью которого можно подключаться практически к любому приемнику различных брендов, которые работают на разных протоколах.
Какие радиочастотные чипы должны быть в мультипротокольном TX модуле?
В первую очередь это зависит от ваших потребностей, тем не менее, на Banggood уже появились TX модули 4 в 1, то есть, у него есть все чипы под большинство приемников.
Большинство производителей радио аппаратуры ( Spektrum, FrSky, FlySky) и радио игрушек (Syma, Hubsan и т. д.) используют один из этих 4 чипов для управления соединением между передатчиком и приемником:
| Производитель | RF чип | Примеры протоколов |
|---|---|---|
| Cyprus Semiconductor | CYRF6936 | DSM/DSMX |
| Walkera Devo | ||
| J6Pro | ||
| Texas Instruments | CC2500 | FrSky |
| Futaba SFHSS | ||
| Amiccom | A7105 | FlySky |
| FlySky AFHDS2A | ||
| Hubsan | ||
| Nordic Semiconductor | NRF24L01 | HiSky |
| Syma | ||
| ASSAN | ||
| и другие китайские модели |
Как прошить модуль?
Если у вас модуль Jumper JP4IN1, iRangeX IRX4 и т. д., а также аппаратура управления на OpenTX или JumperTX, то выбирайте multi-stm-opentx-****-*****-v*****.bin
Настройка каналов
Единственная настройка, которую нужно сделать, это привязать переключатели режимов на пульте к каналам 5 и 6. Я рекомендую сделать 1 канал на постановку и снятие с охраны дрона, а второй на переключение режимов полета (стабилизация или акро). Как это сделать, читаем ниже:
Подключение FlySky к компьютеру и симулятору
FlySky можно подключить к ПК двумя способами — нормальным способом с помощью кабеля или кастомным-кулибинским с помощью аудиокабеля Jack 3,5 мм.
Кабель выглядит вот так:

Подключается к разъему в задней части пульта:

С кабелем все просто, подсоединили к пульту, подсоединили к ПК, далее заходим в симулятор и калибруем.
Но что делать, если кабеля нет, а полетать хочется? Для этого смотрим видео от блогера AlexGyver, чтобы перейти сразу к нашему вопросу, перемотайте на 16:31:

Читайте также: