
Настроить драйвер шагового двигателя dm860s
Trema-модуль Адаптер драйвера шагового двигателя входит в линейку Trema-модулей, что позволяет подключить его к Arduino через Trema Shield по одному 3-проводному и двум 1-проводным шлейфам (идёт в комплекте) без пайки, без дополнительных проводов и переходников, его можно подключать к цифровому выводу Arduino.
Адаптер драйвера шагового двигателя подключается к 3 любым цифровым выводам Arduino.
| Выводы адаптера | Значение | Выводы Arduino |
|---|---|---|
| E (Enable) | Разрешение чипу начать работу. Инверсный вывод (0 - разрешить, 1 - запретить); | Любой цифровой вывод |
| G (GND) | Земля | GND |
| V (VCC) | Питание логики | 3V3/5V |
| S (STEP) | Подача импульсного сигнала шаговому двигателю для поворота (1 импульс - 1 шаг) | Любой цифровой вывод |
| D (DIR) | Указание направления вращения шагового двигателя (0 или 1) | Любой цифровой вывод |
Модуль удобно подключать 3 способами, в зависимости от ситуации:
Способ - 1 : Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO

Способ - 2 : Используя Trema Set Shield
Модуль можно подключить к любому из цифровых входов Trema Set Shield.

Способ - 3 : Используя проводной шлейф и Shield
Используя 5-проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.

Подключение шагового двигателя к адаптеру:
После установки драйвера мотора в адаптер подключите питание ШД и сам ШД согласно следующей схеме:

Настройка размера шага двигателя:

На плате имеется блок перемычек для регулировки размера шага двигателя.
Для каждого драйвера таблица шагов будет своя, в зависимости от модели драйвера.
Ниже приведены таблицы настройки размера шага для драйверов DRV8825 и A4988.
Драйвер A4988:
| Размер шага | MS-3 | MS-2 | MS-1 |
|---|---|---|---|
| Полный шаг | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 1 | 1 |
Драйвер DRV8825:
| Размер шага | MS-3 | MS-2 | MS-1 |
|---|---|---|---|
| Полный шаг | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 0 | 0 |
| 1/32 шага | 1 | 0 | 1 |
| 1/32 шага | 1 | 1 | 0 |
| 1/32 шага | 1 | 1 | 1 |
Питание:
Адаптер драйвера шагового двигателя имеет колодку для подключения внешнего питания (для шагового двигателя) согласно указанной полярности, а так же выводы G и V для питания логики, которые подключаются соответственно к выводам GND и 5V Arduino.
Примеры:
Управление вращением шагового двигателя с помощью потенциометра.
Для управления шаговым двигателем (ШД) понадобится драйвер мотора. В данном случае используется драйвер мотора A4988.
Устанавливаем его в адаптер, а после этого подключаем адаптер и потенциометр к Arduino.
Адаптер драйвера шагового двигателя:
- E - цифровой вывод 7;
- G - GND;
- V - 5V;
- S - цифровой вывод 6;
- D - цифровой вывод 10;
Потенциометр:
После загрузки скетча и подключения питания к двигателю, обратите внимание на потенциометр. При плавном повороте ручки потенциометра вправо двигатель будет плавно набирать скорость и вращаться по-часовой стрелке, а при плавном повороте ручки влево двигатель будет плавно набирать скорость и вращаться против часовой стрелки.
Управление вращением 2 шаговых двигателей с помощью джойстика.
Для управления шаговым двигателем (ШД) понадобится драйвер мотора. В данном случае используется драйвер мотора A4988.
Устанавливаем его в адаптер, а после этого подключаем адаптер и джойстик к Arduino:
Адаптер драйвера шагового двигателя:
- E - цифровой вывод 7;
- G - GND;
- V - 5V;
- S - цифровой вывод 6;
- D - цифровой вывод 10;
Джойстик:
- X - A2;
- K - не подключен;
- V - 5V;
- G - GND;
- Y - A1;
После загрузки скетча и подключения питания к двигателю, обратите внимание на джойстик. При повороте ручки джойстика вправо/вверх двигатели оси Х/У будет плавно набирать скорость и вращаться по-часовой стрелке, а при плавном повороте ручки влево/вниз двигатели будут плавно набирать скорость и вращаться против часовой стрелки.
ГЛАВНАЯ / КАтегории / Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).

С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.

Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Драйвер шагового двигателя DM860H - предназначен для управления биполярным шаговым двигателем с номинальным напряжением от 24В до 110В и пиковым током до 7,2А. Драйвер оснащен защитой от перегрева, от повышенного напряжения и от перегрузки по току. Все входы управления имеют оптическую развязку. На радиаторе драйвера установлен вентилятор принудительного охлаждения.
В драйвере реализована высокая плавность движения вала шагового двигателя, высокий отдаваемый момент, алгоритмы подавления резонанса шагового двигателя и определения остановки вала двигателя («срыва»), функция автоматического снижения тока удержания и снижение уровня шума при работе двигателя.
Характеристики:
Подключение:
Назначение силовых выводов колодки «High Viltage»:
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Назначение выводов управления колодки «Signal»:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino и назначение управляющих сигналов, описано в статье Wiki - Сигналы управления драйвера ШД.
Настройка:
Выбор тока фазы:
Ток фазы настраивается DIP-переключателями SW1, SW2 и SW3 согласно таблице на корпусе.
В таблице указан рабочий ток, пиковый ток и положение переключателей.
Выбор тока удержания:
Ток удержания настраивается переключателем SW4.
- ON - ток в момент удержания не снижается «Full Cerrent» - полный ток фазы;
- OFF - ток в момент удержания снижается «Half Current» - половинный ток фазы.
Удержанием считается остановка двигателя с удержанием вала.
Выбор микрошага:
Микрошаг настраивается DIP-переключателями SW5, SW6, SW7 и SW8 согласно таблице на корпусе.
В таблице указано количество тактов на полный оборот вала и положение переключателей
(дополнительно может быть указано количество микрошагов на полный шаг).
Индикация ошибок:
Зелёный светодиод:
- Не светится - отсутствует питание на выводах «AC+» и «AC-» колодки «High Viltage».
Красный светодиод:
- Мигает 1 раз через паузу - ток в обмотках двигателя превысил допустимый предел;
- Мигает 2 раза через паузу - напряжение питания превысило допустимый предел;
Комплектация:
Ссылки:
Убедитесь, что у вас есть все необходимое для вашего проекта – ниже представлен выбор необходимых дополнительных услуг!

Как известно, драйверы шаговых двигателей компании Leadshine серий AM, EM и DM обладают рядом уникальных функций.
Однако, чтобы воспользоваться преимуществами этих функций в полной мере, драйверы необходимо настроить. Выполняется настройка с помощью специального фирменного ПО - ProTuner. Для настройки потребуется компьютер под управлением Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.
Подключаем драйвер к COM-порту компьютера с помощью кабеля, устанавливаем ProTuner на компьютер, подаем питание на драйвер.
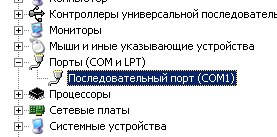
После запуска ProTuner будет предложено выбрать COM-порт для установки связи с драйвером. Номер порта можно посмотреть в диспетчере устройств:
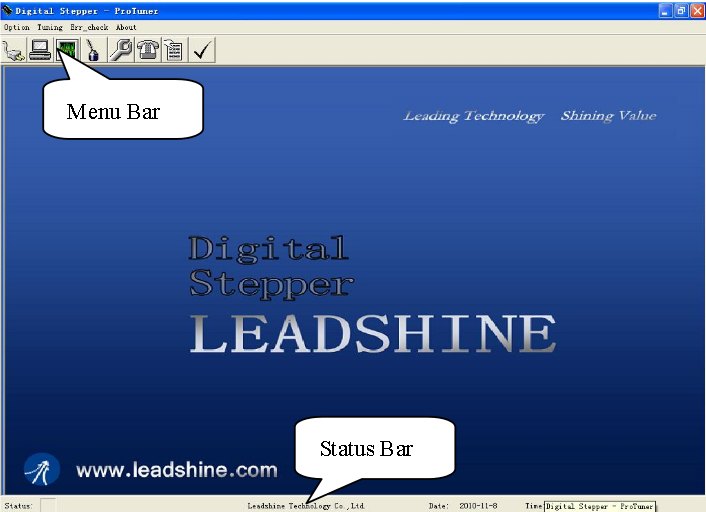
После успешного запуска будет показано основное меню ProTuner:
Настройка контура регулирования обмоток шагового двигателя
Настройка драйвера начинается с пункта меню Tuning, где настраиваются параметры ПИ-регулятора уровня тока в обмотках двигателя. На графике отражается изменение тока во времени, оранжевая линия показывает эталонный уровень тока, зеленый - реальный ток. В идеале график должен быть правильной прямоугольной формы. Значение I-test задает требуемый уровень тока - он должен быть равен рабочему току обмоток двигателей.
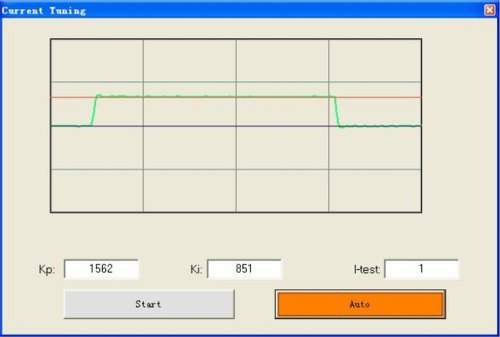
Настройка ПИ-регулятора заключается в подборе двух параметров - пропорционального Kp и интегрального Ki.
Пропорциональный коэффициент Kp соответствует названию - результат его влияния в том, что чем больше разница между нужным уровнем тока и реальным током обмотки, тем быстрее происходит изменение тока драйвером. Большие значения пропорционального коэффициента приводят к возникновению колебаний в регулируемом процессе.
Интегральный коэффициент обладает сглаживающим эффектом, и устраняет т.н. статическую ошибку. Слишком малые значения Ki приводят к тому, что статическая ошибка не компенсируется до конца, слишком большие значения приводят к тому, что уровень тока "плавает" вокруг необходимого значения.
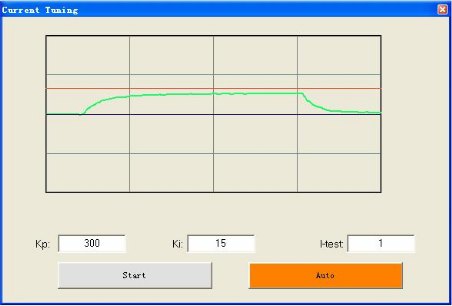
Ниже пример неудачно настроенного контура. Слишком маленький пропорциональный коэффициент Kp привел к тому, что ток слишком медленно меняется, причем скорость изменения падает по мере приближения к заданному уровню, а интегральный коэффициент Ki=15 оказался недостаточен для компенсации статической ошибки - в результате ток так и не достигает нужного уровня за шаг.
Можно также воспользоваться функцией автоматического подбора параметров, нажав кнопку Auto. При этом драйвер самостоятельно протестирует обмотки и выберет подходящие коэффициенты. Именно это происходит при вкл/выкл переключателя SW4(см. документацию на AM882).
Примечание. Производитель рекомендует настраивать параметры на ненагруженном двигателе.
Настройка основных параметров драйвера
После настройки контура тока можно перейти к настройке продвинутых функций драйверов Leadshine. Они настраиваются в окне System Config:
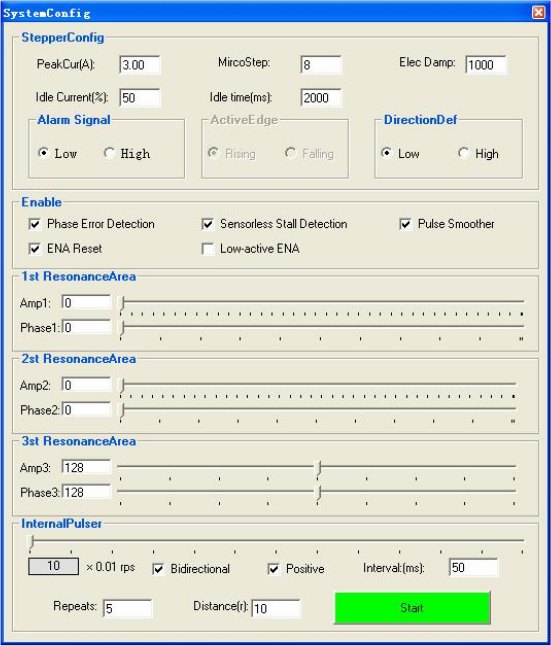
PeakCur(A) - пиковый ток в обмотке шагового двигателя. Обратите внимание, что производителями ШД указывается среднеквадратичное значение тока!
Microstep - если DIP-переключатели установлены нужным образом(см. документацию на драйвер), можно задать точное деление шага с помощью этого параметра.
Elec Damp - "коэффициент электронного демпфирования". Данное число используется как некий коэффициент в антирезонансных алгоритмах. Алгоритмы подавления резонанса Leadshine держатся в секрете, поэтому точное назначение параметра неизвестно, однако известно, что данный коэффициент полезен при устранении вибраций, а также есть рекомендация производителя - сперва настроить коэффициенты 3 резонансных областей со значением коэффициента по умолчанию, прежде чем переходить к подбору Elec Damp - возможно, подбор не потребуется.
Idle Current - величина тока удержания(при простое мотора) в % от рабочего тока.
Idle time - время простоя мотора, после истечения которого ток снижается до уровня, заданного предыдущим параметром.
Phase Error Detection - задает, будет ли драйвер диагностировать ошибки, связанные с функционированием обмоток мотора и выдавать сигнал аварии. Лучше всегда оставлять включенным.
Sensorless stall detection - функция определения момента остановки вала двигателя. При включенной функции драйвер постарается определить, когда произошел внезапный останов вала(вал заклинило или он остановился по другой причине, например из-за пропуска шагов) и выдаст сигнал аварии на выход ALM. Отключать данную функцию стоит только если есть подозрения на ложные срабатывания, а также если не планируется использовать выход аварии драйвера для остановки всего станка.
ENA Reset - при установленной галочке драйвер можно вывести из состояния "авария" без выключения питания, с помощью снятия-подачи сигнала ENABLE.
Low-active ENA - данная функция инвертирует уровень сигнала ENABLE. Аналогично, уровни сигналов ALM и DIR выбираются соответствующими переключателями.
Pulse smoother - алгоритм сглаживания периода поступающих импульсов STEP. Назначение данной функции в том, чтобы немного сгладить негативные эффекты, связанные с нестабильностью входящих импульсов. Так, например, программа Mach3 генерирует сигнал на пинах LPT-порта с крайне большой дисперсией периода импульсов - такая неравномерность очень негативно сказывается на максимально достижимой скорости станка. Однако, данную функцию лучше отключить - работающий фильтр импульсов отключает мультистеппинг. Это особенность всех драйверов Leadshine, не является ошибкой, а осознанным решением производителя. Польза от мультистеппинга видится гораздо большей, чем от фильтра импульсов по той причине, что неравномерность STEP, генерируемых Mach3 настолько велика, что её не сгладить никаким фильтром, а вибрации ШД на низких частотах - очень серьезная проблема, которая почти полностью устраняется мультистеппингом:
Настройка параметров резонансных областей
В драйверах Leadshine AM,EM и DM выделены 3 диапазона скорости вращения ШД, в которых наиболее вероятно возникновение вибраций. Для их устранения предоставляется возможность настройки 2 параметров для каждой области - коррекция соотношения амплитуды тока обмоток и сдвиг фаз. Порядок настройки не регламентируется производителем, даются лишь несколько рекомендаций:
1) Производить настройку на ненагруженном моторе(без подсоединения приводного винта/ремня)
2) Все подстройки ползунками производить на предварительно четко выделенной резонансной частоте вращения.
Ниже описана методика, предлагаемая Михаилом Юровым.
С помощью встроенного генератора импульсов двигатель раскручивается до появления вибрации (первая резонансная область соответствует скорости примерно 0.5-1.2 об/сек, вторая - 1.2-2.5 об/сек, третья 2.5-5 об/сек.)
Ползунок амплитуды перемещается таким образом, чтобы добиться максимальной вибрации, после чего легко подобрать частоту наибольшего резонанса. Зафиксировав частоту, используя ползунки коррекции амплитуды и сдвига фаз добиться максимально плавного движения(хотя бы на слух). После настройки на данной частоте - скорость вращения увеличивается до проявления вибрации в следующей области.

Введение
DM860 - это полностью цифровой шаговый привод, разработанный с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Он достиг уникального уровня плавности системы, обеспечивая оптимальный крутящий момент и исключает среднюю нестабильность.
По сравнению с традиционными аналоговыми приводами DM860 может управлять шаговым двигателем с гораздо меньшим уровнем шума,
меньший нагрев и более плавное движение. Его уникальные особенности делают DM860 идеальным выбором для приложений с высокими требованиями.
Особенности
Области применения
Подходит для широкого диапазона шаговых двигателей, от NEMA размера 17 до 42. Он может использоваться в различных типах машин, таких как XY столы, гравировальные машины, этикетировочные машины, лазерные резаки, устройства для захвата и т. Д. Особенно подходит для желаемых приложений с низким уровнем шума, низким нагревом, высокой скоростью и высокой точностью.
Характеристики
Электрические характеристики (T j = 25/77)
Температура окружающей среды
Механические характеристики ( единица измерения: мм [дюйм] )

Рисунок 1: Механические характеристики
* Рекомендуется использовать боковой монтаж для лучшего отвода тепла
- Надежная рабочая температура водителя должна быть
- Рекомендуется использовать автоматический режим холостого хода, а именно: ток автоматически снижается до 50% при остановке двигателя, чтобы уменьшить нагрев драйвера и нагрев двигателя;
- Рекомендуется устанавливать драйвер вертикально, чтобы увеличить площадь радиатора. При необходимости используйте метод принудительного охлаждения для охлаждения системы.
Назначение контактов и описание
DM860 имеет два разъема: разъем P1 для подключения сигналов управления и разъем P2 для подключения питания и двигателя. В следующих таблицах приведены краткие описания двух разъемов. Более подробное описание контактов и связанных проблем представлено в разделах 4, 5, 9.
В постоянного тока
Источник питания, 24 ~ 80 В постоянного тока, включая напряжениеtage колебания и объем ЭДСtage.
Фаза двигателя А
4. Интерфейс разъема управляющего сигнала (P1)
DM860 может принимать дифференциальные и несимметричные входы (включая выход с открытым коллектором и PNP). DM860 имеет 3 оптически изолированных логических входа, которые расположены на разъеме P1 для приема сигналов управления драйвером линии. Эти входы изолированы, чтобы минимизировать или устранить электрические шумы, связанные с сигналами управления приводом. Рекомендуется использовать управляющие сигналы линейного драйвера для повышения помехоустойчивости драйвера в условиях помех. На следующих рисунках показаны подключения к сигналам с открытым коллектором и PNP.
![Разъем управляющего сигнала (P1) Интерфейс]()
5. Подключение двигателя

DM860 может управлять любыми 2-х и 4-х фазными гибридными шаговыми двигателями.
Подключение к 4-выводным двигателям
4-выводные двигатели наименее гибкие, но их проще всего подключить. Скорость и крутящий момент будут зависеть от индуктивности обмотки. При настройке выходного тока драйвера умножьте указанный фазный ток на 1.4, чтобы определить пиковый выходной ток.


Рисунок 5: Подключение 4-выводного двигателя
Подключение к 6-выводным двигателям

Рисунок 6: Подключение полукатушки 6-выводного двигателя (более высокая скорость)
Полная конфигурация катушки
Конфигурация с полной обмоткой шестиступенчатого двигателя должна использоваться в приложениях, где желателен более высокий крутящий момент при более низких скоростях. Эта конфигурация также называется полной медью. В режиме полной обмотки двигатели должны работать только при 70% номинального тока, чтобы предотвратить перегрев.

Рисунок 7: Соединения с полной обмоткой 6-выводного двигателя (более высокий крутящий момент)


Выбор источника питания
DM860 совместим с шаговыми двигателями среднего и малого размера (от типоразмера NEMA от 17 до 34), производимых многими производителями двигателей по всему миру. Для достижения хороших ходовых качеств важно выбрать объем питания.tage и выходной ток должным образом. Вообще говоря, объем поставкиtage определяет высокоскоростные характеристики двигателя, а выходной ток определяет выходной крутящий момент ведомого двигателя (особенно на более низкой скорости). Более высокий объем предложенияtage позволит достичь более высокой скорости двигателя за счет большего шума и нагрева. Если требования к скорости движения низкие, лучше использовать меньшую мощность питания.tage для уменьшения шума, нагрева и повышения надежности.
Регулируемый или нерегулируемый источник питания
Для питания драйвера могут использоваться как регулируемые, так и нерегулируемые источники питания. Однако нерегулируемые источники питания предпочтительны из-за их способности выдерживать скачки тока. Если регулируемые источники питания (например, большинство импульсных источников) действительно используются, важно иметь большой выходной ток, чтобы избежать таких проблем, как ток cl.amp, напримерample, используя источник питания 4A для работы двигателя с драйвером 3A. С другой стороны, если используется нерегулируемый источник питания, можно использовать источник питания с более низким номинальным током, чем у двигателя (обычно 50% - 70% тока двигателя). Причина в том, что драйвер потребляет ток от конденсатора источника питания нерегулируемого источника питания только во время включения цикла ШИМ, но не во время отключения. Следовательно, средний ток, потребляемый от источника питания, значительно меньше тока двигателя. Для бывшегоampТо есть, два двигателя на 3А могут питаться от одного источника питания на 4А.
Несколько драйверов
Рекомендуется использовать несколько драйверов для совместного использования одного блока питания, чтобы снизить стоимость, если блок питания имеет достаточную мощность.
Во избежание перекрестных помех НЕ подключайте последовательно входные контакты источника питания драйверов. (Вместо этого подключите их к источнику питания отдельно.)
Выбор Supply Vol.tage
Силовые МОП-транзисторы внутри DM860 могут фактически работать в диапазоне +24 ~ + 110 В постоянного тока, включая колебания входной мощности и напряжение обратной ЭДС.tage генерируется обмотками двигателя при торможении вала двигателя. Более высокий объем предложенияtage может увеличивать крутящий момент двигателя на более высоких скоростях, что помогает избежать потери шагов. Однако чем выше объемtage может вызвать более сильную вибрацию двигателя на более низкой скорости, а также может вызвать перенапряжениеtage защита или даже повреждение водителя. Поэтому рекомендуется выбирать только достаточно высокий объем питания.tage для предполагаемых приложений, и рекомендуется использовать блоки питания с теоретической выходной мощностьюtage +20 ~ + 68 В постоянного тока, оставляя место для колебаний мощности и противо-ЭДС.
Выбор разрешения микрошага и выходного тока драйвера
Читайте также: