
Какие драйвера выбрать для nema 23
Всем привет решил создать такую тему думаю будет полезна хотелось чтоб здесь писали о драйверах кто сам какими пользуется и свои отзывы также конечно можно задавть вопросы. Купил себе драйвера HY-DIV268N-5A и хочу написать о них драйвера неплохие на микросхеме Toshiba tb6600hg. У китайцев заявлено на сайте что можно подавать 50в но не делайте это максимум 42в я подал 46в планировал поднять до 48 и когда гонял станок проверял и настраивал то драйвера пустили дымок. Я их разобрал микросхема сгорела также диоды от ОЭДС были пробиты они на 2А 400в. Эти драйвера подходят для нема 17 и нема 23 двигателей очень хорошо. Думаю это пригодится на нашем форуме кто будет строить станок или обнавлять свой старый то эта информация пригодится. И если у кого другие есть драйвера то пишите свои отзывы чтоб люди знали что стоит покупать а что нет.
2 Ответ от nachkar1978 2017-05-02 06:57:15
3 Ответ от Роман_Удмурт 2017-05-05 20:54:41 (изменено: Роман_Удмурт, 2017-05-05 21:00:51)
Действительно, "чисто для ознакомления, набора опыта и в топку", как выше изложил nachkar1978.
ВНИМАНИЕ! Из личного опыта и практики 3 года с оборудованием завода Twitte Готовые система ЧПУ на основе контроллера TuxWay ПРОБЛЕМ НЕ БЫЛО НИ РАЗУ.

Конечно, не забываем очищать внутренние элементы от древесной пыли. Этот БП с материнкой и драйверами и контроллерами у меня находится в гаражном помещении, круглый год, и при повышенной влажности, и разные паучки в нем ползают - но ведь пашет иногда сутками и по сей день. а нареканий нет вообще.
4 Ответ от Sem 2017-11-16 10:25:21
Для синхронной работы двух ШД по одной оси нужно подключать к одному драйверу паралельно оба ШД увеличив соответственно ток на драйвере в два раза, или необходимо подключать два драйвера к одному выходу контроллера?
5 Ответ от maksim.mixeew2017 2017-11-16 10:38:20
два шд,два драйвера.
6 Ответ от Sem 2017-11-16 12:36:15
Объясните почему?
Просто сам я инженер по электроприводам, но с данными драйверами не встречался, по теории чтобы два двигателя работали синхронно их подключают к одному блоку электропривода, увеличив нагрузочную способность электропривода в одну цепь, иначе при выходе из строя одного элемента, систему переклинет, что приведет к серьезным авариям, как минимум выведет рабочий двигатель и драйвер в режим короткого замыкания.
Повторюсь с современными системами не работал, и эти драйвера не видел, может за 20 лет все поменялось, сейчас современными учёными доказано что и Земля плоская.
7 Ответ от maksim.mixeew2017 2017-11-16 12:46:09
Следует придерживаться правила - для одного ШД нужен один драйвер. Если нужно чтобы 2 ШД вращались (шагали) синхронно - нужно взять два драйвера, подключить к каждому драйверу свой шаговый двигатель и у драйверов объединить сигналы STEP/DIR/ENABLE. Сигналы STEP/DIR/ENABLE будут подаваться синхронно на оба драйвера и ШД будут шагать одновременно. Нельзя к одному драйверу подключить 2 шд,это выведет его из строя.Конечно можно их запаралелить и поднять напругу,но это нагрузка на драйвер и сработает только с биполярниками. Подключать два шд к одному STEP тоже не рекомендуется,так как при подклинивании одного из них,пойдет перекос портала который нужно выправлять в ручную.
8 Ответ от Sem 2017-11-16 13:26:50
Наверное вы описались, т.к. при паралельном подключении напряжение сохраняется, а увеличивается нагрузка в виде тока на выходе драйвера. Напряжение следует увеличивать при последовательном подключении. Напряжение нагрузкой как таковой не является, нагрузка определяется током.
Опять же вопрос: как же происходит защита при отказе одного из элементов- выхода из строя выходного канала контроллера, драйвера или самого ШД? Ведь при неисправности любого элемента произойдет перекос по нагрузке, что произведет к выходу из строя приводов или второго двигателя. Также может произойти режим рекуперации на двигателе, если например откажет канал контроллера, вследствии чего вылетит и драйвер.
9 Ответ от maksim.mixeew2017 2017-11-16 14:26:39
Как Вам сказать,идеальной защиты нет,при отказе контролера встанет весь станок,при отказе драйвера,встанет шд,но второй продолжит работать,не надолго,так как на самом драйвере стоит защита шд,которая и его остановит.На шпинделе так же,на инверторе есть защита.
Добавлено: 2017-11-16 16:28:09
В любом случае,что бы избежать неприятностей,надо регулярно проводить ТО и осмотр станка.
10 Ответ от Sem 2017-11-16 15:49:50
Примерно понятно.
Хотя есть ещё вопросы, но скорей всего к производителям комплектующих.
11 Ответ от anykey54 2017-11-17 12:53:38 (изменено: anykey54, 2017-11-17 12:56:05)
Коллеги, появился новый интересный драйвер
Что-нибудь необычного заметили? Нет? Тогда смотрим сюда:
А питание-то у него " 24V-80VDC or VAC16-70VAC" О, как! Можно БП не использовать. Нашел по нему всего один маленький обзорчик на тюбике от нерусского коллеги - очень хвалит, не греется, говорит, стабильный и ваще конфета. 6А, пиковый 7,2А. Для Нема34 специально.
12 Ответ от Master Yoda 2017-11-17 13:16:05
Цена вопроса и целеобразность использования ?
13 Ответ от ygordom 2017-11-17 13:24:15
Это получается он со своим встроенным импульсником, круто, очень даже круто ))))
14 Ответ от leo_m_1 2017-11-17 18:13:45 (изменено: leo_m_1, 2017-11-17 23:05:14)
У многих драйверов есть свой диодный мост и они могут работать от переменки и постоянки. У меня похожие драйвера тоже есть свой диодный мост. В этих нет своего импульсника! Максимум 70в переменки. им можно подавать.
15 Ответ от anykey54 2017-11-17 18:21:30 (изменено: anykey54, 2017-11-17 18:25:34)
Цена вопроса и целеобразность использования ?
49 американских денег - тыц по поводу целесообразности - экономия на БП (а уж на трех или четырех, так вообще ощутимая).
со своим встроенным импульсником
вычитал, что с выпрямителем (хотя, перевод - штука ненадежная), а китаец написал, что пофигу, как подключать, там типа само все сделается, если постоянный той, но на тюбике смотрел видео, там подключал человек, как привычно - масса крайний, плюс - со стороны других клемм. По плате инфы очень мало, практически нет, китайцы говорят, новая, по отзывам очень хорошая. Если питать переменным, то чет меня сомнения берут по поводу, а какой же мощности (и размера) должен быть транс? Игорь, ты в этом хорошо разбираешься, подумай?
Мне такие едут, ибо *********(цензура) драйвера уже трижды купил! Но два питальника по 800 Ватт я все же взял к ним )))
16 Ответ от ygordom 2017-11-17 18:24:53
Диодный мост не понижает напряжение с 220 до 70, он его только выпримляет (делает + и -)
Понижает его не диодный мост.
17 Ответ от anykey54 2017-11-17 18:28:20 (изменено: anykey54, 2017-11-17 18:30:31)
Игорь, ты прав, но внимательней посмотри, я написал - 24V-80VDC or VAC16-70VAC
Переменкой кормить до 70В, постоянным до 80. Вот я поэтому и спросил про транс - это ж какой он будет такой мощности и 220/70?
18 Ответ от ygordom 2017-11-17 18:31:25 (изменено: ygordom, 2017-11-17 18:32:39)
Я что-то не пойму, он у тебя от сети работает или все-же ему нужна переменка с определенным вольтажом? Т.е. намотанный транс.
Скажем у меня есть рессивер размером с драйвер, старая версия его работала от постоянки 12 вольт, новая версия работает от сети 220.
Если переменка ограничевается 70-ю вольтами, то он далеко не автономный, и дополнительний источник питания ему нужен.
Что касаемо транса на 70 вольт, намотать такой не проблема, тут стоит вопрос по току, есть-ли у драйвера внутри стабилизатор по току или нет, если есть, то можно намотать ампер на 8, а драйвер стабилизирует себе сколько ему нужно, и порог стабилизатора тоже нужно знать что-бы не спалить его к чертям, вообщем хар-ки в студию, тогда можно и будет раздумывать )))
Добавлено: 2017-11-17 19:35:50
19 Ответ от anykey54 2017-11-17 18:43:32
нужна переменка с определенным вольтажом
новая версия работает от сети 220
есть и такие драйвера, офигенские просто! китаисы их позиционируют "для НЕМА_42", но я лучше небольшой вертолет себе куплю, чем их )))
далеко не автономный, и дополнительний источник питания ему нужен
нужно знать что-бы не спалить его к чертям
поэтому я купил для них питальники
я там ссылку на продавана дал выше, ну очень мало инфы по ним, какой-то неруссий коллега славянской наружности видео выложил на тюбике, небольшие коменты от его земляков есть, хвалит. Попробую найти. О, вот жеж
Добавлено: 2017-11-17 21:51:27
Если тебе подойдет сделаю солидную скидку как для хорошего человека
Игорь, спасибо большое! У меня эти драйвера с двумя питальниками по 800 ватт и еще комплект отличных драйверов DQ860MA с четырьмя питальниками на 350 ватт, наконец-то движняк какой-то грузовой начался в честь дня железнодорожника ))). Теперь я как кот Матроскин - с двумя коровами буду, если доедут-таки, тьху-тьху )))
хочется странного.. а именно делать филамент самому.
1. вариант из бутылок - этап пройден и технических вопросов у меня нет. система отлажена - но уж очень муторно..
Проблема печати в режиме вазы
Друзья! Помогите понять, в чем проблема. Печатаю на FlashForge Creator 3 в режиме вазы, как только начинается печать с частыми изменениями направления.
Чем 3D принтер отличается от 3D плоттера?
На занятиях по моделированию один школьник спросил - Чем 3D принтер отличается от 3D плоттера и что лучше для нови.
Читайте в блогах
Fusion 360. Урок - Моделируем дизайнерские стенки
Подставка-штатив для телефона
Держатель для надфилей для рабочего стола
Какое будущее у аддитивных технологий? | Стрим
Обзор и возможности лазерного гравировального станка ATOMSTACK A5 30W
Рекомендации по подготовке 3D-принтера к печати
Популярные
3D-принтеры
Комментарии и вопросы
медь еще расплавить надо сумет.
Не согласен, не понты вовсе. Н.
Интересно, а вот эта шляпа, ко.
Решил перепрошить Ender 3 на M.
При печати на принтере размеры.
Здравствуйте. Очень активно пр.
Добрый день! Я новичок, п.
СООБЩЕСТВО
РАЗДЕЛЫ
СОЦСЕТИ



Пароль успешно изменен
На ваш e-mail высланы новые регистрационные данные.

Пожалуйста, проверьте Вашу почту
Вам было отправлено письмо с инструкцией по восстановлению пароля. Если вы не получили письмо в течение 5 минут, проверьте папку спам, попробуйте еще раз.
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
Добрый день 3д печатники и 'колхозники'.
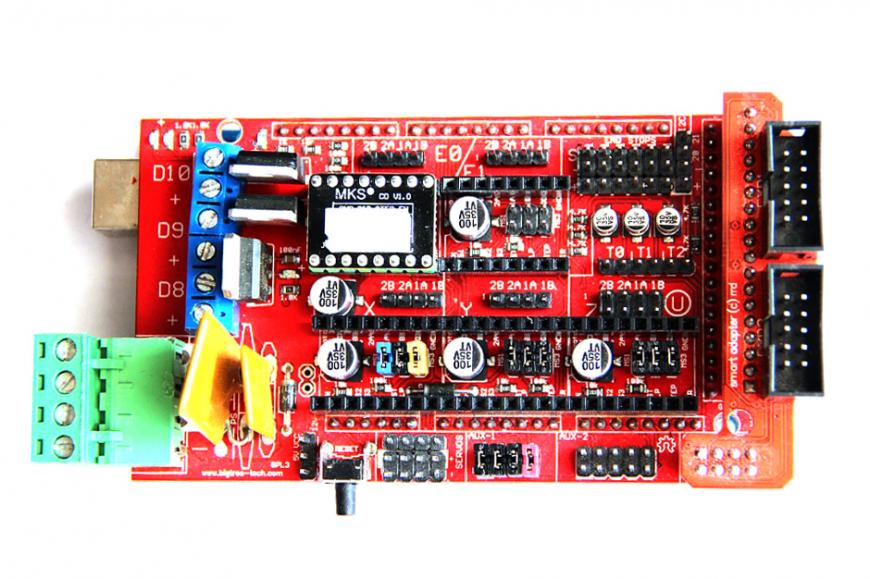
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.

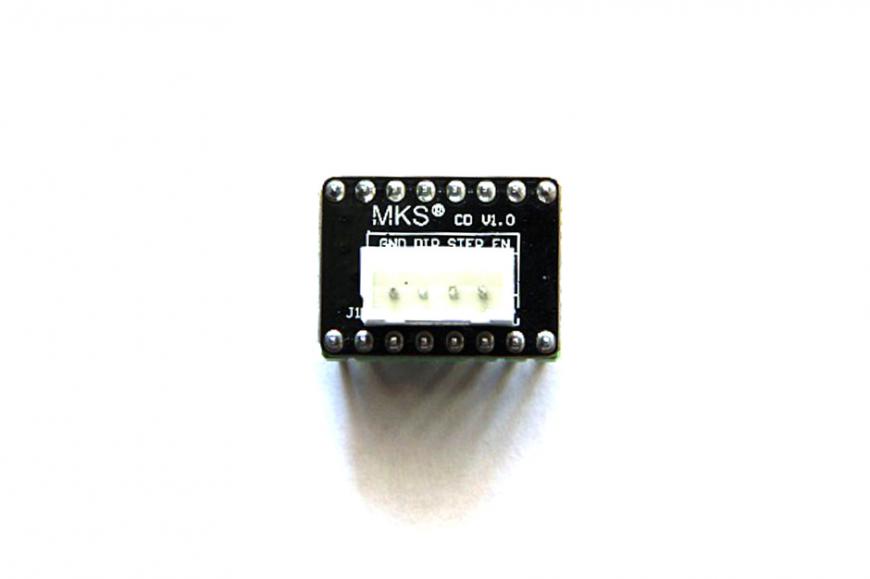
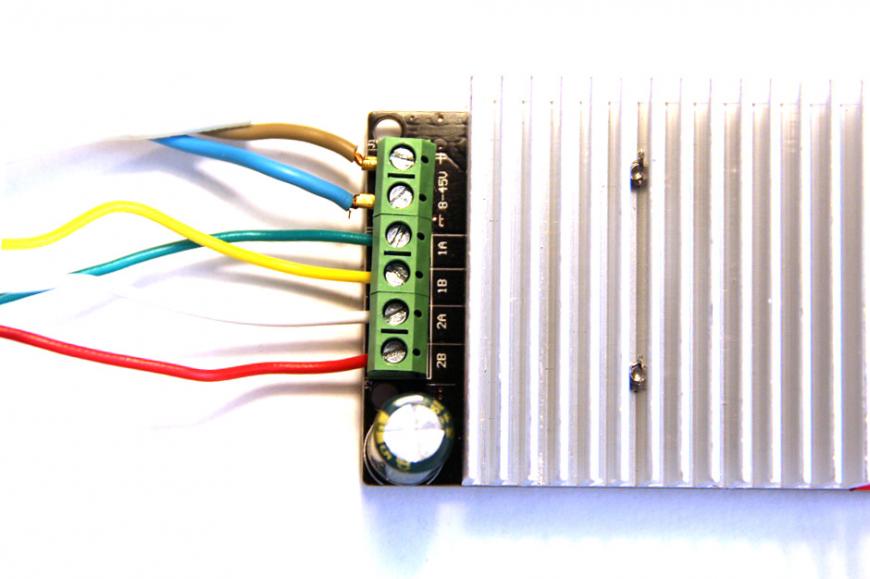
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
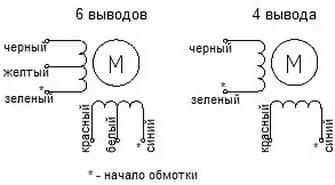
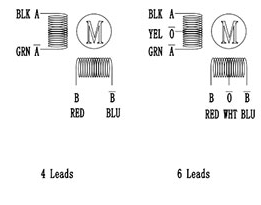
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
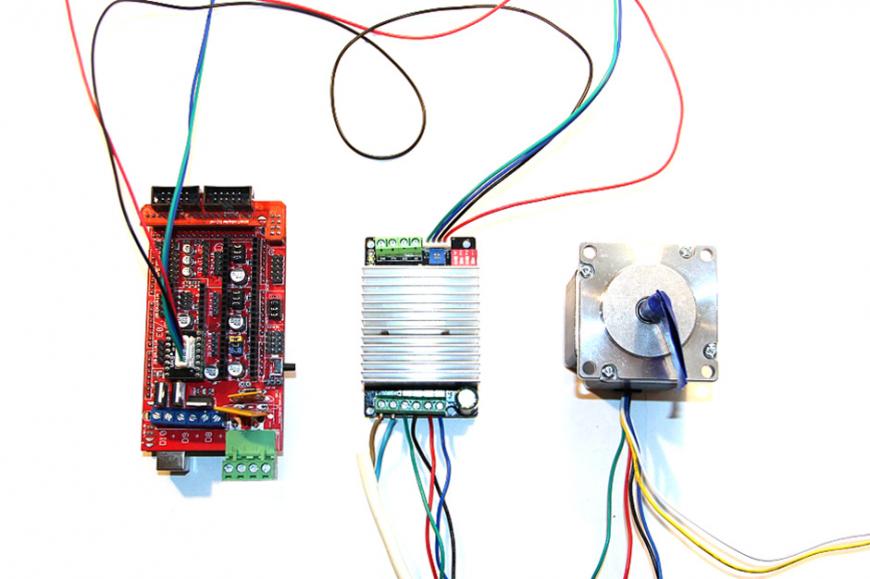
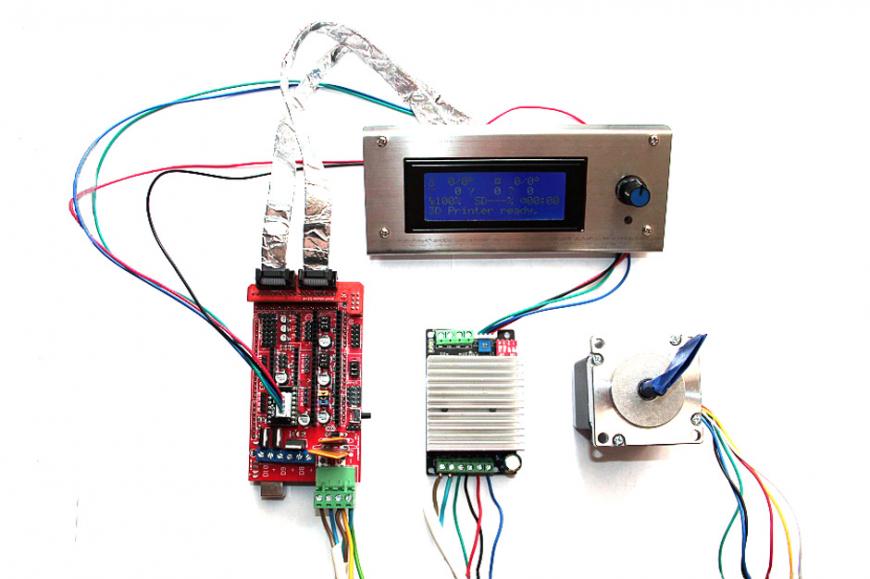
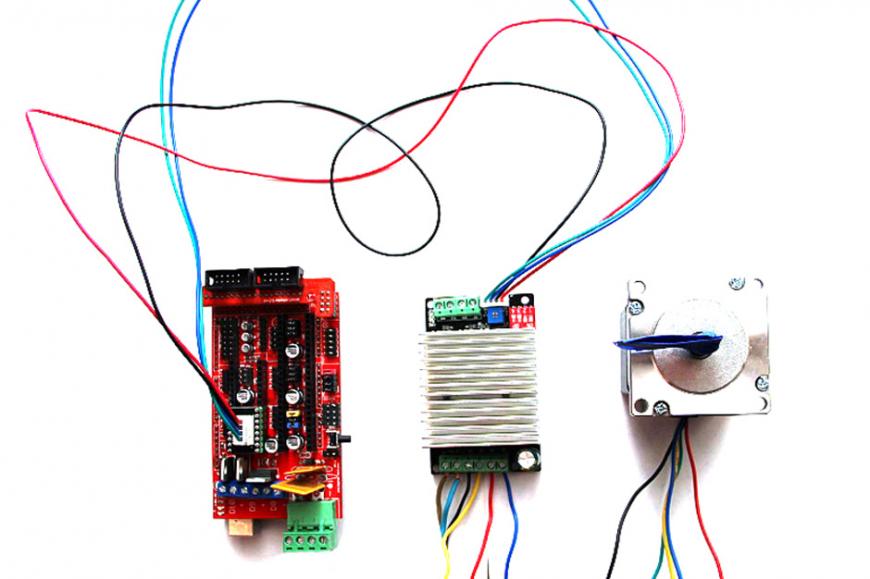
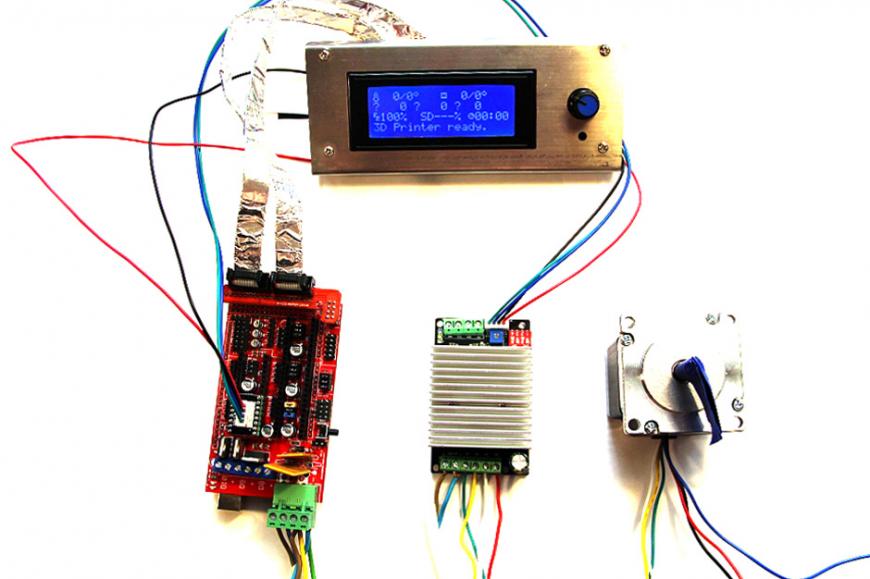
Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
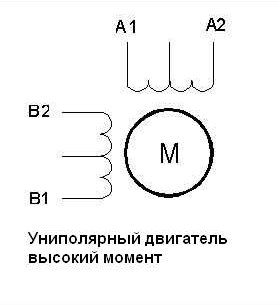
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
Пошаговая инструкция для чайников :).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
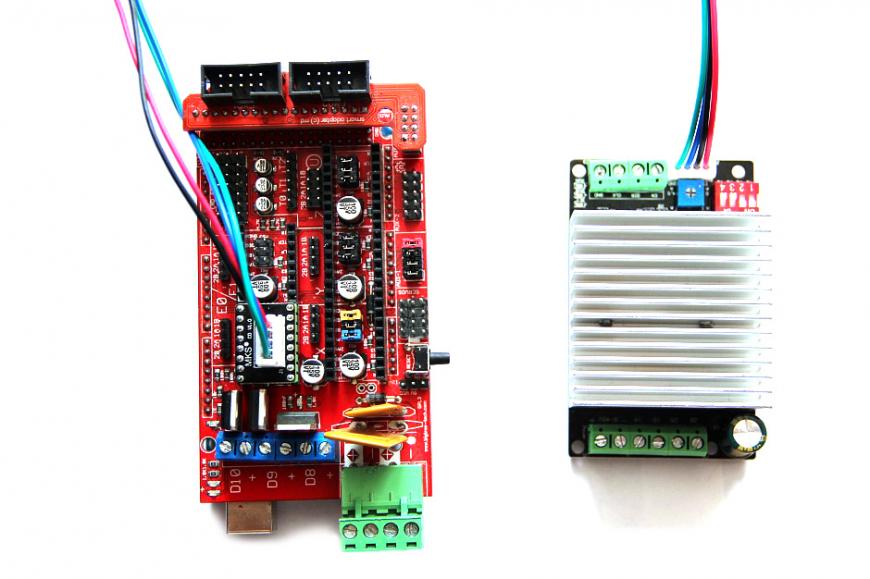
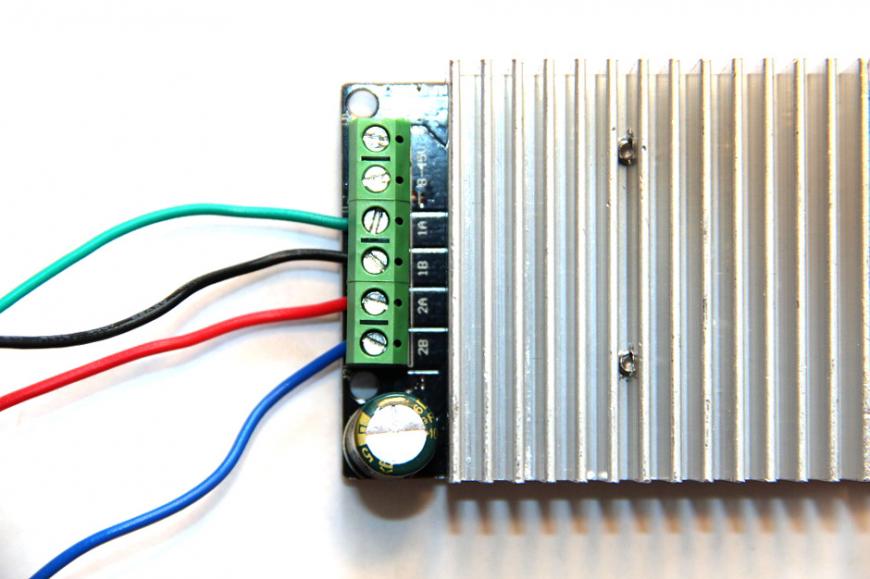
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, черный в разъём 1B, красный в разъём 2A, синий в разъём 2B. Желтый и белый провода лучше заизолировать, чтоб лишний раз с бубном не прыгать.
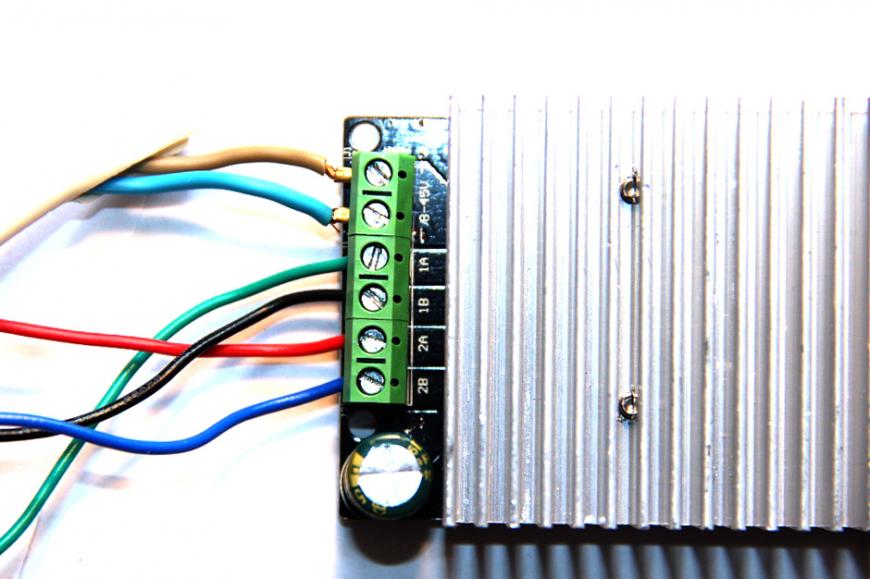
2) Второй вариант. Подключаем двигатель к драйверу не используя крайние выводы в обмотках, то есть черный и синий. Таким способом подключения мы получим высокую приемистость.

Пошаговая инструкция уже для опытных мейкеров 8).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
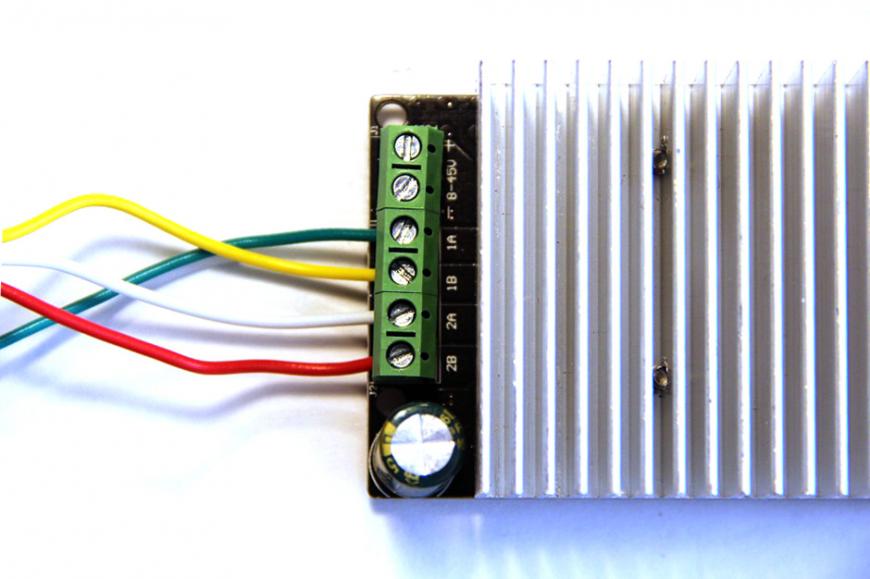
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).

Если вам интересно, какой драйвер шагового двигателя выбрать для сборки станка с ЧПУ или заменить существующий драйвер шагового двигателя в вашем ЧПУ, то это руководство поможет вам.
В идеале вам нужно, чтобы драйвер мог управлять вашим шаговым двигателем без чрезмерного нагрева или шума. Вы также не захотите покупать слишком дорогой шаговый драйвер, когда используете относительно небольшой шаговый двигатель.
Я написал это руководство после рассмотрения нескольких вариантов шагового драйвера и использования многих из них в своей личной мастерской.
Обратите внимание, что драйвер шагового двигателя также называется контроллером двигателя и используется в данном руководстве как синонимы.
Это руководство разделено на разделы, в которых я перехожу от шаговых драйверов с самыми низкими значениями пикового тока к самым высоким.
Чтобы максимально использовать этот обзор, вы должны знать либо максимальный номинальный ток на вашем шаговом двигателе, либо при каком токе вы планируете запускать двигатель в соответствии с требованиями к крутящему моменту и частоте вращения.
Мой лучший выбор — это драйвер шагового двигателя DM542T, который представляет собой мощный, но доступный шаговый драйвер, который подойдет практически для любого приложения ЧПУ.
Вот лучшие драйверы шагового двигателя, доступные сегодня для приложений ЧПУ:
| Шаговый драйвер | Пиковый ток |
| 1. Драйвер шагового двигателя A4988 | 1А (2А с охлаждением) |
| 2. Драйвер шагового двигателя DRV8825 | 1,5 А (2,2 А с охлаждением) |
| 3. Драйвер шагового двигателя DM542T | 4,2 А |
| 4. Драйвер шагового двигателя TB6600 | 4,0 А |
| 5. Драйвер шагового двигателя DM556T | 5.6 A |
| 6. Драйвер шагового двигателя DM860T | 7,2 А |
Драйвер шагового двигателя A4988
Шаговый драйвер A4988 — один из самых популярных на рынке небольших шаговых драйверов с ЧПУ.
Этот шаговый драйвер можно найти во многих бюджетных контроллерах ЧПУ и настольных ЧПУ. Настольный CNC 3018 использует его в качестве шагового драйвера.
Код A4988 представляет собой номер модели шаговой ИС, произведенной Texas Instruments.
Эта ИС была впервые использована на коммутационной плате и преобразована в практически пригодный для использования шаговый драйвер компанией Pololu Robotics.
Позже его клонировали многие китайские производители, и в настоящее время он продается по очень доступной цене.
Вероятно, это самый дешевый вариант шагового драйвера.
A4988 может подавать ток 1 А на шаговый двигатель без радиатора. С дополнительным большим радиатором и принудительным воздушным охлаждением этот драйвер технически может обеспечивать ток до 2 А.
Однако, на самом деле, вам следует ожидать, что с этим драйвером на шаговый двигатель будет подаваться ток до 1 А, если вы не хотите рискнуть его поджарить.
Что это значит для шаговых двигателей? Это означает, что A4988 может очень хорошо работать с NEMA 14 с током менее 1 А.
Он также может работать с небольшими двигателями NEMA 17 с номинальным током до 1,5 А. Хотя не рекомендую. Как показывает практика, в идеале вам следует покупать шаговый привод с номинальным током, который в 1,4 раза превышает номинальный ток шагового двигателя.
Если вы не знаете, какие шаговые двигатели выбрать для своего ЧПУ, то это поможет вам — Шаговый двигатель для ЧПУ станка. Какой выбрать?
Этот драйвер используется во многих настольных ЧПУ и 3D-принтерах, поэтому он идеально подходит для такого приложения.
Обратите внимание, что вам нужен один драйвер A4988 для каждого шагового двигателя, который вы используете.
A4988 может делать микрошаги до 1/16 в пятиступенчатых режимах. Очень важно запускать этот шаговый двигатель в микрошаговом режиме, чтобы избежать проблем с резонансом .
Потенциометр в A4988 позволяет легко регулировать ток в соответствии с требованиями вашего шагового двигателя.

Регулировка тока с помощью потенциометра в шаговом драйвере A4988
Для работы этого контроллера двигателя вам потребуется напряжение источника питания в диапазоне 8–35 В. Большинство людей устанавливают напряжение питания 24 В, чтобы обеспечить бесперебойную работу A4988.
В целом, это отличный стартерный шаговый драйвер, который стоит шокирующе недорого.
Драйвер шагового двигателя DRV8825

Драйвер шагового двигателя DRV8825
Драйвер шагового двигателя DRV8825 — еще один небольшой драйвер ЧПУ, который очень популярен в небольших приложениях ЧПУ.
DRV8825 также представляет собой шаговую ИС, произведенную Texas Instruments. Pololu Robotics впервые разместила его на коммутационной доске.
Вы всегда можете купить оригинальный Pololu DRV8825, хотя вам придется заплатить примерно в 5 раз больше за почти незначительное повышение производительности.
Этот драйвер можно назвать обновленной версией драйвера A4988.
Он может выдерживать ток 1,5 А без какого-либо охлаждения и 2,2 А с принудительным воздушным охлаждением и теплоотводом, что является обновлением по сравнению с током 1 А без охлаждения в A4988.
Этот контроллер двигателя с ЧПУ может достаточно хорошо управлять двигателем NEMA 17 на 1,5 А и, очевидно, любым шаговым двигателем меньшего размера.
В то время как A4988 может делать до 1/16 микрошага, DRV8825 может делать до 1/32 микрошага, делая движение двигателя более плавным.
DRV8825 поставляется с алюминиевым радиатором.

Шаговый драйвер DRV8825
DRV8825 — это замена драйверов A4988 в любой системе ЧПУ. Это потому, что они имеют одинаковый размер, распиновку и интерфейс.
Регулировка тока от драйвера в DRV8825 очень похожа на таковую в A4988, путем регулировки потенциометра.
В целом это обновленный шаговый драйвер A4988, который, как ни странно, стоит почти столько же. Если у вас нет особых причин для приобретения A4988, используйте драйвер шагового двигателя DRV8825.
Драйвер шагового двигателя DM542T

Драйвер шагового двигателя DM542T
DM542T — мой личный фаворит и тот, который я чаще всего использую для своих DIY-приложений с ЧПУ.
Этот шаговый драйвер может приводить в действие почти любой двигатель NEMA 17 и NEMA 23, за исключением, вероятно, NEMA 23 с высоким крутящим моментом с током 4,2 А.
Этот драйвер шагового двигателя — отличный выбор почти для любого другого шагового двигателя в ЧПУ. Я говорю это потому, что NEMA 34 очень редко встречается в ЧПУ.
Это делает драйвер отличным выбором практически для любого проекта DIY с ЧПУ на основе GRBL, включая большие рамы 8 ‘x 4’.
Если вам нужно выбрать контроллер на основе GRBL, который вам нужен для вашего ЧПУ, то это руководство, которое я написал, вероятно, вам поможет — Контроллеры GRBL для ЧПУ для любителей.
Этот контроллер мотора известен своей высокой надежностью и долгим сроком службы. Благодаря микросхеме DM542T, этот продукт отличается высочайшим качеством. Теплоотвод и охлаждение этого мотора превосходны. Это очень тихий драйвер, он не напрягается даже при 4А.
Одной из приятных особенностей этого двигателя является отличная система плавного пуска. Шаговые двигатели без этого потребляют большой ток, когда они изначально запитаны.
Это вызывает резкий скачок в двигателе и значительно сокращает срок его службы.
DM542T смягчает это, регулируя ток и позволяя крутящему моменту увеличиваться постепенно.
Функция антирезонанса DM542T работает так, как рекламируется, и это позволяет избежать любой вибрации и шума в средних диапазонах (в усилителях).
Кроме того, шаговые двигатели обычно нагреваются, когда они не вращаются при подключении к источнику питания.
DM542T имеет функцию уменьшения тока холостого хода, при которой ток падает до половины значения оборотов.
DM542T предлагает микрошаги до 1/128. Но что действительно приятно, так это микрошаговое управление.
Вы можете использовать DIP-переключатели в шаговом двигателе, чтобы легко установить число микрошага из 15 предустановленных режимов (1/2, 1/4, … и так далее до 1/128).
В отличие от предыдущих драйверов шагового двигателя в этом списке, вам не нужно поворачивать потенциометр для регулировки тока.
Подобно микрошаговому управлению, вы можете использовать DIP-переключатели для установки тока из 8 выбираемых пиковых токов (1,00 A, 1,46 A, 1,91 A, 2,37 A, 2,84 A, 3,31 A, 3,76 A, 4,20 A).
Для запуска этого шагового драйвера вам необходимо подать входное напряжение 20-50 В постоянного тока. На всякий случай безопаснее поддерживать верхний предел напряжения питания 45 В постоянного тока.
Как и в случае с большинством шаговых двигателей, при увеличении напряжения питания вы получите более высокий крутящий момент даже при более высоких оборотах.
В целом, это, вероятно, лучший драйвер двигателя 24 В в этом списке.
Обратите внимание, что для запуска 3 двигателей вам потребуется три шаговых драйвера.
Вы не можете запустить несколько двигателей от одного шагового драйвера, так как это одноосные шаговые драйверы.
В последнее время я начал чаще использовать драйвер DM556 это более распространённый, улучшенный аналог DM542T, к сожалению он немного дороже
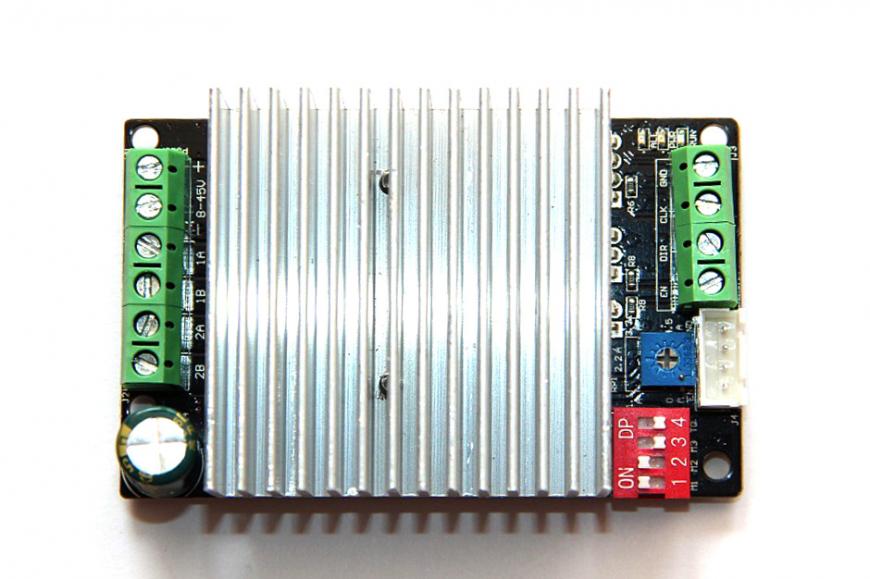
Драйвер шагового двигателя TB6600

Драйвер TB6600
| Максимум. Текущий | 4А |
| Шаговый двигатель | NEMA 14,17,23 (до 4A) |
| Источник питания | 9-42В |
Драйвер TB6600 — очень популярный драйвер, который чаще всего используется для питания двигателей NEMA 17 и NEMA 23.
Шаговая ИС этого драйвера производится Toshiba. Если быть очень точным, использованный шаговый двигатель — TB67S109A, а не TB6600.
Но по характеристикам аналогичен TB6600.
Он имеет семь предустановленных выходных токов (0,5 А / 1,0 А / 1,5 А / 2,0 А / 2,5 А / 2,8 А / 3,0 А / 3,5 А), которыми можно управлять с помощью шестизначного DIP-переключателя на драйвере.
Максимальный выходной ток, который можно установить с помощью DIP-переключателей, составляет 3,5 А, что ниже теоретического максимального тока 4 А.
На мой взгляд, этот драйвер может хорошо работать, если ваши требования до 3А. Кроме того, он шумит и нагревается.
Как и другие драйверы шагового двигателя для станков с ЧПУ в этом диапазоне, он имеет встроенные функции защиты от перегрузки по току и температуры.
Этот шаговый двигатель имеет пять предустановленных режимов микрошага (1/1, 1/2, 1/4, 1/8, 1/16, 1/32), которыми можно управлять с помощью DIP-переключателей.
Источник питания, который можно использовать для запуска этого шагового двигателя, составляет 9–42 В с рекомендуемым напряжением 12–30 В.
На всякий случай лучше не превышать 30 Вольт.
Большинство пользователей используют этот шаговый двигатель при напряжении 24 В, поскольку они получают нужные обороты и крутящий момент при этом напряжении питания.
По словам производителя, этот шаговый двигатель идеально подходит для достижения целевого крутящего момента 255 унций на дюйм или ниже.
Что мне показалось наиболее интересным в этом шаговом двигателе, так это то, что он предлагает ток не менее 3 А без шума, почти вдвое дешевле, чем DM542T.
Помните, что с этим контроллером мотора или DM542T вам понадобится три таких контроллера для работы трехосного ЧПУ.
Если ваш бюджет ограничен, а требования к току шагового двигателя ниже 3А, я предлагаю вам получить это. В противном случае я предлагаю вам выбрать DM542T или DM556 — улучшенный аналог DM542T.
Драйвер шагового двигателя DM556T

Драйвер шагового двигателя DM556T
Этот шаговый драйвер работает на микросхеме DM556T. Этот драйвер аналогичен интерфейсу DM542T. Однако он может выдерживать пиковый ток 5,6 А.
Это делает этот шаговый двигатель идеальным даже для двигателей NEMA 23 с высоким крутящим моментом (4,2 А) и удерживающим моментом 425 унций на дюйм.
Этот шаговый драйвер подходит практически для всех проектов с ЧПУ, включая большие фрезерные станки с ЧПУ 8 ‘x 4’.
Единственное, что он не может работать, это, вероятно, NEMA 34 с током 6 А и удерживающим моментом более 1000 унций.
Если это ваше требование, я предлагаю вам взглянуть на следующий драйвер шагового двигателя в этом списке.
DM556T обладает отличными антирезонансными характеристиками для обеспечения плавного движения и бесшумной работы.
Подобно DM542T, он имеет DIP-переключатели для выбора из 16 предустановленных разрешений микрошага (до 1/125).
Кроме того, он имеет еще один набор DIP-переключателей, которые вы можете включать и выключать для выбора из 8 предустановленных настроек выходного тока (1,8 А, 2,1 А, 2,7 А, 3,2 А, 3,8 А, 4,3 А, 4,9 А, 5,6 А).

Драйвер шагового двигателя DM556T сбоку
У него есть функция определения тока холостого хода, с помощью которой он вдвое уменьшает выходной ток, если двигатель не работает.
Этот шаговый двигатель почти всегда работает при температуре ниже 60 ° C из-за превосходной технологии теплоотвода в этом драйвере.
Рекомендуемое входное напряжение для этого шагового драйвера составляет 20-50 В постоянного тока.
Я обнаружил, что документация по этому шаговому драйверу достаточно хороша для новичков.
Этот драйвер стоит немного больше, чем DM542T, и отлично подходит для любого ЧПУ с шаговыми двигателями вплоть до NEMA 24.
Драйвер шагового двигателя DM860T

Драйвер шагового двигателя DM860T
Этот шаговый драйвер действительно является гигантским шаговым драйвером в этом списке с точки зрения номинального тока.
Благодаря микросхеме шагового двигателя DM860T этот драйвер может обрабатывать до 7,2 А.
Редко вам это понадобится на станке с ЧПУ DIY, потому что такие усилители требуются только шаговыми двигателями NEMA 34, а они редко встречаются на станках с ЧПУ DIY.
Однако есть некоторые доступные ЧПУ, в которых используются двигатели NEMA 34 (например, ЧПУ) для дополнительной мощности резания во время тяжелых производственных работ.
Вы также найдете эти тяжелые двигатели на оси Z тяжелых настольных фрезеров и некоторых токарных станков.
В этом шаговом драйвере есть несколько мощных антирезонансных функций, которые позволяют ему работать через такие большие двигатели и высокие крутящие моменты.
Вы можете выбрать из шестнадцати предустановленных разрешений микрошага (до 1/256).
Подобно другим драйверам, вы можете использовать DIP-переключатель для выбора из восьми предустановленных пиковых токов (2,40 А, 3,08 А, 3,77 А, 4,45 А, 5,14 А, 5,83 А, 6,52 А, 7,20 А).
При пиковых токах, предлагаемых этим драйвером, и тяжелых двигателях NEMA 34, которые работают на нем, вам понадобится мощный источник питания.
Понятно, что DM860T работает как от источников питания переменного, так и от постоянного тока. Вы можете использовать источники питания в диапазоне 18–80 В переменного тока или 36–110 В постоянного тока для работы этого шагового устройства.
В целом, это мощный драйвер шагового двигателя, который вы должны получить, если у вас высокие требования к току. Есть несколько других брендов, которые предлагают такую мощность, однако они намного дороже.
Ближайшим аналогом DM860T является шаговый драйвер DM870, который почти так же хорош.

Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций - тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» - внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом - ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.
Читайте также: