
Последовательность выполнения инструкций процессором
Рассмотрим процесс выполнения процессором команды для коротких (с ФТ или логические) операций. Как об этом говорилось ранее, обработка команды, или цикл процессора, может быть разделена на несколько основных этапов, которые можно назвать микрокомандами, которых известно пять основных типов.
Каждая операция требует для своего выполнения времени, равного такту генератора процессора. Отметим, что к длинным операциям (ПТ) это не имеет отношения - там другая арифметика. Очевидно, что при тактовой частоте в 100 МГц быстродействие составит 20 млн операций в секунду.
Все этапы команды задействуются только 1 раз и всегда в одном и том же порядке: одна за другой. Это, в частности, означает, что если первая микрокоманда выполнила свою работу и передала результаты второй, то для выполнения текущей команды она больше не понадобится и, следовательно, может приступить к выполнению следующей команды.
Конвейеризация осуществляет многопоточную параллельную обработку команд, так что в каждый момент одна из команд считы-вается, другая декодируется и так далее, и всего в обработке одновременно находится пять команд. Таким образом, на выходе конвейера на каждом такте процессора появляется результат обработки одной команды (одна команда в один такт). Первая инструкция может считаться выполненной, когда завершат работу все пять микрокоманд.
Такая технология обработки команд носит название конвейерной ( pipeline) обработки. Каждая часть устройства называется ступенью конвейера, а общее число ступеней - длиной линии конвейера.
С ростом числа линий конвейера и увеличением числа ступеней на линии увеличивается пропускная способность процессора при неизменной тактовой частоте. Процессоры с несколькими линиями конвейера получили название суперскалярных. Pentium - первый суперскалярный процессор Intel. Здесь две линии, что позволяет ему при одинаковых частотах быть вдвое производительней i80486, выполняя сразу две команды за такт.
Начиная с 80486 восемь регистров для ПЗ (именуемых ST(0) - ST (7)) встраивают в центральный процессор. Каждый регистр имеет ширину 80 бит и хранит числа в формате стандарта ПЗ расширенной точности ( IEEE floating-point standard).
Эти регистры доступны в стековом порядке. Имена (номера) регистров устанавливаются относительно вершины стека ( ST (0) - вершина стека, ST(1) - следующий регистр ниже вершины стека, ST (2) - второй после вершины стека и так далее ). Вводимые данные таким образом всегда сдвигаются « вниз » от вершины стека, а текущая операция совершается с содержимым вершины стека.
SlMD - процессы (команды)
Г. Флинном в 1966 году была предложена классификация ЭВМ и вычислительных систем (в основном - суперкомпьютеров), основанная на совместном рассмотрении потоков команд и данных. В процессорах таких известных производителей как Intel и AMD все более полно используются некоторые из этих архитектурных наработок.
Таблица классификации ФлиннаПоток данных Поток команд
Одиночный SISD - Single Instruction stream/Single Data stream ( Одиночный поток Команд и Одиночный поток Данных - ОКОД) MISD - Multiple Instruction stream/ Single Data stream ( Множественный поток Команд и Одиночный поток Данных - МКОД)
Множественный SIMD - Single Instruction stream/Multiple Data stream ( Одиночный поток Команд и Множественный поток Данных - ОКМД) MIMD - Multiple Instruction stream/Multiple Data stream ( Множественный поток Команд и Множественный поток Данных -МКМД)
Например, в общем случае архитектура SIMD ( ОКМД) предполагает создание структур векторной или матричной обработки. Под эту схему хорошо подходят задачи обработки матриц или векторов (массивов), задачи решения систем линейных и нелинейных, алгебраических и дифференциальных уравнений, задачи теории поля и другое
В микропроцессорах массового выпуска при обработке мультимедийных данных также целесообразно применять подобные решения.
Динамическое исполнение (dynamic execution technology)
Динамическое исполнение - технология обработки данных процессором, обеспечивающая более эффективную работу процессора за счет манипулирования данными, а не просто линейного исполнения списка инструкций.
С большой точностью (более 90 %) процессор предсказывает, в какой области памяти можно найти следующие инструкции. Это оказывается возможным, поскольку в процессе исполнения инструкции процессор просматривает программу на несколько шагов вперед.
Внеочередное выполнение (выполнение вне естественного порядка - out-of-order execution
Процессор анализирует поток команд и составляет график исполнения инструкций в оптимальной последовательности независимо от порядка их следования в тексте программы, просматривая декодированные инструкции и определяя, готовы ли они к непосредственному исполнению или зависят от результата других инструкций. Далее процессор определяет оптимальную последовательность выполнения и исполняет инструкции наиболее эффективным образом.
Переименование (ротация) регистров ( register rename
Чтобы избежать пересылок данных между регистрами в соответствующей команде изменяется адрес регистра, содержащего данные, участвующие в следующей операции. Поэтому вместо пересылки данных в регистр-источник осуществляется трактовка регистра с данными как источника.
Выполнение по предположению (спекулятивное - speculative
Процессор выполняет инструкции (до пяти инструкций одновременно) по мере их поступления в оптимизированной последовательности (спекулятивно). Поскольку выполнение инструкций происходит на основе предсказания ветвлений, результаты сохраняются как предположительные ( « спекулятивные »). На конечном этапе порядок инструкций восстанавливается.
Существуют следующие варианты спекулятивного выполнения:
предикация ( predication) - одновременное исполнение нескольких ветвей программы вместо предсказания переходов (выполнения наиболее вероятного);
опережающее чтение данных ( speculative loading), то есть загрузка данных в регистры с опережением, до того, как определилось реальное ветвление программы (переход управления).
Эти возможности осуществляются комбинированно - при компиляции и выполнении программы.
Обычный компилятор транслирует оператор ветвления (например, if-then-else) в блоки машинного кода, расположенные последовательно в потоке. Обычный процессор в зависимости от исхода условия исполняет один из этих базовых блоков, пропуская все другие. Более развитые процессоры пытаются прогнозировать исход операции и предварительно выполняют предсказанный блок. При этом в случае ошибки много тактов тратится впустую. Сами блоки зачастую весьма малы - две или три команды, - а ветвления встречаются в коде в среднем каждые шесть манд. Такая структура кода делает крайне сложным его параллельное выполнение.
При использовании предикации компилятор, обнаружив оператор ветвления в исходной программе, анализирует все возможные ветви (блоки) и помечает их метками или предикатами ( predicate). После этого он определяет, какие из них могут быть выполнены параллельно (из соседних, независимых ветвей).
В процессе выполнения программы ЦП выбирает команды, которые взаимно независимы и распределяет их на параллельную обработку. Если ЦП обнаруживает оператор ветвления, он не пытается предсказать переход, а начинает выполнять все возможные ветви программы.
Таким образом, могут быть обработаны все ветви программы, но без записи полученного результата. В определенный момент процессор наконец « узнает » о реальном исходе условного оператора, записывает в память результат « правильной ветви » и отменяет остальные результаты.
В то же время, если компилятор не « отметил » ветвление, процессор действует как обычно - пытается предсказать путь ветвления и так далее Испытания показали, что описанная технология позволяет устранить более половины ветвлений в типичной программе, и, следовательно, уменьшить более чем в 2 раза число возможных ошибок в предсказаниях.
Опережающее чтение (предварительная загрузка данных, чтение по предположению) разделяет загрузку данных в регистры и их реальное использование, избегая ситуации, когда процессору приходится ожидать прихода данных, чтобы начать их обработку.
Прежде всего, компилятор анализирует программу, определяя команды, которые требуют приема данных из оперативной памяти. Там, где это возможно, он вставляет команды опережающего чтения и парную команду контроля опережающего чтения ( speculative check). В то же время компилятор переставляет команды таким образом, чтобы ЦП мог их обрабатывать параллельно.
Многократное декодирование команд
В то время как традиционный процессор линейно переводит команды в тактовые микрокоманды и последовательно их выполняет, ЦП с многократным декодированием сначала преобразует коды исходных команд программы в некоторые вторичные псевдокоды (предварительное декодирование, или предекодирование), которые затем более эффективно исполняет ядро процессора. Эти преобразования могут содержать несколько этапов. В качестве примеров рассмотрим 2-3- ступенчатые декодеры.
Многократные декодеры и смежные технологии
a - преобразование CISC/RISC в VLIW;
б - преобразование VLIW/CICS в RISC;
Декодирование команд CISC/RISC в VLIW
Декодирование команд CISC/RISC в VLIW. Эти технологии использованы в мобильных процессорах Crusoe ( фирма Transmeta) и некоторых ЦП Intel - архитектуры IA-64 и EPIC (Explicitly Parallel Instruction Computing - вычисления с явной параллельностью инструкций).
В частности, в Crusoe на входе процессора - программы, подготовленные в системе команд Intel х 86, однако внутренняя система команд VLIW не имеет ничего общего с командами х 86 и разработана для быстрого выполнения при малой мощности, используя обычную CMOS- технологию. Окружающий уровень программного называют программным обеспечением модификации кодов ( Code Morphing software - CMS, или CM), здесь осуществляется динамический перевод команд х 86 в команды VLIW.
Декодирование команд CISC VLIW в RISC
Указанные выше достоинства RISC- архитектуры привели к тому, что во многих современных CISC- процессорах используется RISC- ядро, выполняющее обработку данных. При этом поступающие сложные и разноформатные команды предварительно преобразуются в последовательность простых RISC- операций, быстро выполняемых этим процессорным ядром. Таким образом, работают, например, современные модели процессоров Pentium и К 7, которые по внешним показателям относятся к CISC- процессорам. Использование RISC- архитектуры является характерной чертой многих современных процессоров.
В процессорах предыдущих поколений каждая выбранная команда отдельно декодируется и выполняется. Макрослияние позволяет объединять типичные пары последовательных команд (например, сравнение, сопровождающееся условным переходом) в единственную внутреннюю команду-микрооперацию (МкОП, micro-op) в процессе декодирования. В дальнейшем две команды выполняются как одна МкОП, сокращая полный объем работы процессора.
Микрослияние ( micro-op fusion)
В современных доминирующих процессорах команды х 86 (macro-ops) обычно расчленяются на МкОП прежде, чем передаются на конвейер процессора. Микрослияние группирует и соединяет МкОП, уменьшая их число. Исследования показали, что слияние МкОП вкупе с выполнением команд в измененном порядке может уменьшить число МкОП более чем на 10 процентов. Данная технология использована в системах Intel Core, а ранее апробировалась в ПЦ мобильных систем Pentium М.
В процессорах AMD К 8 конвейер строится на том, что работа с потоком МкОП происходит тройками инструкций ( AMD называет их линиями - line). Конвейер К 8 обрабатывает именно линии, а не х 86- инструкции или отдельные микрооперации.
Технология Hyper-Threading (НТ)
Здесь реализуется разделение времени на аппаратном уровне, Разбивая физический процессор на два логических процессора, каждый из которых использует ресурсы чипа - ядро, кэш-память, шины, исполнительное устройство.
Благодаря НТ многопроцессная операционная система использует один процессор как два и выдает одновременно два потока команд. Смысл технологии заключается в том, что в большинстве случаев исполнительные устройства процессора далеки от полной загруженности. От передачи на выполнение вдвое большего потока команд повышается загрузка исполнительных устройств.
Технологии «невыполнимых битов»
Технологии « невыполнимых битов » (No-eXecute bit). Бит «NX» (63- й бит адреса) позволяет операционной системе определить, какие страницы адреса могут содержать исполняемые коды, а какие - нет. Попытка обратиться к NX- адресу как к исполняемой программе вызывает событие « нарушение защиты памяти », подобное попытке обратиться к памяти « только для чтения » или к области размещения ОС. Этим может быть запрещено выполнение программного кода, находящегося в некоторых страницах памяти, таким образом предотвращая вирусные или хакерские атаки. С теоретической точки зрения, здесь осуществляется виртуальное назначение « Гарвардской архитектуры » - разделение памяти для команд и для данных. Обозначение «NX-bit» используется AMD, Intel использует выражение «XD-bit» (eXecute Disable bit).
Инструмент проще, чем машина. Зачастую инструментом работают руками, а машину приводит в действие паровая сила или животное.
Компьютер тоже можно назвать машиной, только вместо паровой силы здесь электричество. Но программирование сделало компьютер таким же простым, как любой инструмент.
Процессор — это сердце/мозг любого компьютера. Его основное назначение — арифметические и логические операции, и прежде чем погрузиться в дебри процессора, нужно разобраться в его основных компонентах и принципах их работы.
Архитектура фон Неймана

Особенностью таких архитектур была общая шина данных и инструкций. Большинство современных архитектур это программный фон Нейман, однако никто не запрещает делать аппаратный Гарвард. У данной архитектуры большим недостатком является большое зависимости производительности процессора от шины. (Что ограничивает общую производительность процессора).
Память (ОЗУ)
ОЗУ (оперативное запоминающее устройство, англ. RAM) — это большая группа этих самых регистров, соединённых вместе. Память у такого хранилища непостоянная и данные оттуда пропадают при отключении питания. ОЗУ принимает адрес ячейки памяти, в которую нужно поместить данные, сами данные и флаг записи/чтения, который приводит в действие триггеры.
Прим. перев. Оперативная память бывает статической и динамической — SRAM и DRAM соответственно. В статической памяти ячейками являются триггеры, а в динамической — конденсаторы. SRAM быстрее, а DRAM дешевле.
Привилегированный режим
Это режим в котором стартует процессор. В таком режиме программа или ОС имеют полный доступ к памяти в обход MMU/MPU. Все программы запускаются в непривилегированном режиме во избежания прямого доступа к аппаратным подсистемам программ для этого не предназначенных. Например вредоносным программам. В Windows ее часто называют Ring-0, а в *nix — системным. Не стоит путать Привелигированный пользователь и Привилегированный режим ибо в руте вы все еще не можете иметь прямой доступ к аппаратуре (можно загрузить системный модуль который позволит это сделать, но об этом чуть позже :)
Команды (инструкции)
Команды — это фактические действия, которые компьютер должен выполнять. Они бывают нескольких типов:
- Арифметические: сложение, вычитание, умножение и т. д.
- Логические: И (логическое умножение/конъюнкция), ИЛИ (логическое суммирование/дизъюнкция), отрицание и т. д.
- Информационные: move , input , outptut , load и store .
- Команды перехода: goto , if . goto , call и return .
- Команда останова: halt .
Прим. перев. На самом деле все арифметические операции в АЛУ могут быть созданы на основе всего двух: сложение и сдвиг. Однако чем больше базовых операций поддерживает АЛУ, тем оно быстрее.
Инструкции предоставляются компьютеру на языке ассемблера или генерируются компилятором высокоуровневых языков.
В процессоре инструкции реализуются на аппаратном уровне. За один такт одноядерный процессор может выполнить одну элементарную (базовую) инструкцию.
Группу инструкций принято называть набором команд (англ. instruction set).
Хранение информации — регистры и память
Как говорилось ранее, процессор выполняет поступающие на него команды. Команды в большинстве случаев работают с данными, которые могут быть промежуточными, входными или выходными. Все эти данные вместе с инструкциями сохраняются в регистрах и памяти.
Регистры
Регистр — минимальная ячейка памяти данных. Регистры состоят из триггеров (англ. latches/flip-flops). Триггеры, в свою очередь, состоят из логических элементов и могут хранить в себе 1 бит информации.
Прим. перев. Триггеры могут быть синхронные и асинхронные. Асинхронные могут менять своё состояние в любой момент, а синхронные только во время положительного/отрицательного перепада на входе синхронизации.
По функциональному назначению триггеры делятся на несколько групп:
- RS-триггер: сохраняет своё состояние при нулевых уровнях на обоих входах и изменяет его при установке единице на одном из входов (Reset/Set — Сброс/Установка).
- JK-триггер: идентичен RS-триггеру за исключением того, что при подаче единиц сразу на два входа триггер меняет своё состояние на противоположное (счётный режим).
- T-триггер: меняет своё состояние на противоположное при каждом такте на его единственном входе.
- D-триггер: запоминает состояние на входе в момент синхронизации. Асинхронные D-триггеры смысла не имеют.
Для хранения промежуточных данных ОЗУ не подходит, т. к. это замедлит работу процессора. Промежуточные данные отсылаются в регистры по шине. В них могут храниться команды, выходные данные и даже адреса ячеек памяти.
Принцип действия RS-триггера
Арифметико-логическое устройство
Это устройство, как ни странно, выполняет все арифметические и логические операции, например сложение, вычитание, логическое ИЛИ и т. п. АЛУ состоит из логических элементов, которые и выполняют эти операции.

Большинство логических элементов имеют два входа и один выход.
Ниже приведена схема полусумматора, у которой два входа и два выхода. A и B здесь являются входами, S — выходом, C — переносом (в старший разряд).
Схема арифметического полусумматора
Поток инструкций
Современные процессоры могут параллельно обрабатывать несколько команд. Пока одна инструкция находится в стадии декодирования, процессор может успеть получить другую инструкцию.

Однако такое решение подходит только для тех инструкций, которые не зависят друг от друга.
Если процессор многоядерный, это означает, что фактически в нём находятся несколько отдельных процессоров с некоторыми общими ресурсами, например кэшем.
2.1. Процессор.
Самый основной элемент компьютера, это, конечно, процессор. Давайте подробней его рассмотрим. Упрощённая структура процессора (рис. 4):

Рис. 4. Упрощённая структура процессора
Основные элементы процессора:
· Регистры – это специальные ячейки памяти, физически расположенные внутри процессора. В отличие от ОЗУ, где для обращения к данным требуется использовать шину адреса, к регистрам процессор может обращаться напрямую. Это существенно ускорят работу с данными.
· Арифметико-логическое устройство выполняет арифметические операции, такие как сложение, вычитание, а также логические операции.
· Блок управления определяет последовательность микрокоманд, выполняемых при обработке машинных кодов (команд).
· Тактовый генератор , или генератор тактовых импульсов, задаёт рабочую частоту процессора.
2.2. Режимы работы процессора.
Процессор архитектуры x86 может работать в одном из пяти режимов и переключаться между ними очень быстро:
1. Реальный (незащищенный) режим (real address mode) — режим, в котором работал процессор 8086. В современных процессорах этот режим поддерживается в основном для совместимости с древним программным обеспечением (DOS-программами).
2. Защищенный режим (protected mode) — режим, который впервые был реализован в 80286 процессоре. Все современные операционные системы (Windows, Linux и пр.) работают в защищенном режиме. Программы реального режима не могут функционировать в защищенном режиме.
3. Режим виртуального процессора 8086 (virtual-8086 mode, V86) — в этот режим можно перейти только из защищенного режима. Служит для обеспечения функционирования программ реального режима, причем дает возможность одновременной работы нескольких таких программ, что в реальном режиме невозможно. Режим V86 предоставляет аппаратные средства для формирования виртуальной машины, эмулирующей процессор8086. Виртуальная машина формируется программными средствами операционной системы. В Windows такая виртуальная машина называется VDM (Virtual DOS Machine — виртуальная машина DOS). VDM перехватывает и обрабатывает системные вызовы от работающих DOS-приложений.
4. Нереальный режим (unreal mode, он же big real mode) — аналогичен реальному режиму, только позволяет получать доступ ко всей физической памяти, что невозможно в реальном режиме.
5. Режим системного управления System Management Mode (SMM) используется в служебных и отладочных целях.
При загрузке компьютера процессор всегда находится в реальном режиме, в этом режиме работали первые операционные системы, например MS-DOS, однако современные операционные системы, такие как Windows и Linux переводят процессор в защищенный режим. Вам, наверное, интересно, что защищает процессор в защищенном режиме? В защищенном режиме процессор защищает выполняемые программы в памяти от взаимного влияния (умышленно или по ошибке) друг на друга, что легко может произойти в реальном режиме. Поэтому защищенный режим и назвали защищенным.
2.3. Регистры процессора (программная модель процессора).
Для понимания работы команд ассемблера необходимо четко представлять, как выполняется адресация данных, какие регистры процессора и как могут использоваться при выполнении инструкций. Рассмотрим базовую программную модель процессоров Intel 80386, в которую входят:
· 8 регистров общего назначения, служащих для хранения данных и указателей;
· регистры сегментов — они хранят 6 селекторов сегментов;
· регистр управления и контроля EFLAGS, который позволяет управлять состоянием выполнения программы и состоянием (на уровне приложения) процессора;
· регистр-указатель EIP выполняемой следующей инструкции процессора;
· система команд (инструкций) процессора;
· режимы адресации данных в командах процессора.
Начнем с описания базовых регистров процессора Intel 80386.
Базовые регистры процессора Intel 80386 являются основой для разработки программ и позволяют решать основные задачи по обработке данных. Все они показаны на рис. 5.

Рис. 5. Базовые регистры процессора Intel 80386
Среди базового набора регистров выделим отдельные группы и рассмотрим их назначение.
2.4. Регистры общего назначения.
Остальные четыре регистра – ESI (индекс источника), EDI (индекс приемника), ЕВР (указатель базы), ESP (указатель стека) – имеют более конкретное назначение и применяются для хранения всевозможных временных переменных. Регистры ESI и EDI необходимы в строковых операциях, ЕВР и ESP – при работе со стеком. Так же как и в случае с регистрами ЕАХ - EDX, младшие половины этих четырех регистров называются SI, DI, BP и SP соответственно, и в процессорах до 80386 только они и присутствовали.
2.5. Сегментные регистры.
При использовании сегментированных моделей памяти для формирования любого адреса нужны два числа – адрес начала сегмента и смещение искомого байта относительно этого начала (в бессегментной модели памяти flat адреса начал всех сегментов равны). Операционные системы (кроме DOS) могут размещать сегменты, с которыми работает программа пользователя, в разных местах памяти и даже временно записывать их на диск, если памяти не хватает. Так как сегменты способны оказаться где угодно, программа обращается к ним, применяя вместо настоящего адреса начала сегмента 16-битное число, называемое селектором. В процессорах Intel предусмотрено шесть 16-битных регистров - CS, DS, ES, FS, GS, SS , где хранятся селекторы. (Регистры FS и GS отсутствовали в 8086, но появились уже в 80286.) Это означает, что в любой момент можно изменить параметры, записанные в этих регистрах.
В отличие от DS, ES, GS, FS, которые называются регистрами сегментов данных, CS и SS отвечают за сегменты двух особенных типов – сегмент кода и сегмент стека. Первый содержит программу, исполняющуюся в данный момент, следовательно, запись нового селектора в этот регистр приводит к тому, что далее будет исполнена не следующая по тексту программы команда, а команда из кода, находящегося в другом сегменте, с тем же смещением. Смещение очередной выполняемой команды всегда хранится в специальном регистре EIP (указатель инструкции, 16-битная форма IP), запись в который так же приведет к тому, что далее будет исполнена какая-нибудь другая команда. На самом деле все команды передачи управления – перехода, условного перехода, цикла, вызова подпрограммы и т.п. – и осуществляют эту самую запись в CS и EIP.
2.6. Регистр флагов.
Еще один важный регистр, использующийся при выполнении большинства команд, - регистр флагов. Как и раньше, его младшие 16 бит, представлявшие собой весь этот регистр до процессора 80386, называются FLAGS. В EFLAGS каждый бит является флагом, то есть устанавливается в 1 при определенных условиях или установка его в 1 изменяет поведение процессора. Все флаги, расположенные в старшем слове регистра, имеют отношение к управлению защищенным режимом, поэтому здесь рассмотрен только регистр FLAGS (см. рис. 6):

Рис. 6. Регистр флагов FLAGS.
CF – флаг переноса. Устанавливается в 1, если результат предыдущей операции не уместился в приемнике и произошел перенос из старшего бита или если требуется заем (при вычитании), в противном случае – в 0. Например, после сложения слова 0 FFFFh и 1, если регистр, в который надо поместить результат, – слово, в него будет записано 0000 h и флаг CF = 1.
PF – флаг четности. Устанавливается в 1, если младший байт результата предыдущей команды содержит четное число битов, равных 1, и в 0, если нечетное. Это не то же самое, что делимость на два. Число делится на два без остатка, если его самый младший бит равен нулю, и не делится, когда он равен 1.
AF – флаг полупереноса или вспомогательного переноса. Устанавливается в 1, если в результате предыдущей операции произошел перенос (или заем) из третьего бита в четвертый. Этот флаг используется автоматически командами двоично-десятичной коррекции.
ZF – флаг нуля. Устанавливается в 1, если результат предыдущей команды – ноль.
SF – флаг знака. Он всегда равен старшему биту результата.
TF – флаг ловушки. Он был предусмотрен для работы отладчиков, не использующих защищенный режим. Установка его в 1 приводит к тому, что после выполнения каждой программной команды управление временно передается отладчику.
IF – флаг прерываний. Сброс этого флага в 0 приводит к тому, что процессор перестает обрабатывать прерывания от внешних устройств. Обычно его сбрасывают на короткое время для выполнения критических участков кода.
DF – флаг направления. Он контролирует поведение команд обработки строк: когда он установлен в 1, строки обрабатываются в сторону уменьшения адресов, когда DF =0 – наоборот.
OF – флаг переполнения. Он устанавливается в 1, если результат предыдущей арифметической операции над числами со знаком выходит за допустимые для них пределы. Например, если при сложении двух положительных чисел получается число со старшим битом, равным единице, то есть отрицательное, и наоборот.
Флаги IOPL (уровень привилегий ввода-вывода) и NT (вложенная задача) применяются в защищенном режиме.
2.7. Цикл выполнения команды
Программа состоит из машинных команд. Программа загружается в оперативную память компьютера. Затем программа начинает выполняться, то есть процессор выполняет машинные команды в той последовательности, в какой они записаны в программе.
Для того чтобы процессор знал, какую команду нужно выполнять в определённый момент, существует счётчик команд – специальный регистр, в котором хранится адрес команды, которая должна быть выполнена после выполнения текущей команды. То есть при запуске программы в этом регистре хранится адрес первой команды. В процессорах Intel в качестве счётчика команд (его ещё называют указатель команды) используется регистр EIP (или IP в 16-разрядных программах).
Счётчик команд работает со сверхоперативной памятью, которая находится внутри процессора. Эта память носит название очередь команд, куда помещается одна или несколько команд непосредственно перед их выполнением. То есть в счётчике команд хранится адрес команды в очереди команд, а не адрес оперативной памяти.
Цикл выполнения команды – это последовательность действий, которая совершается процессором при выполнении одной машинной команды. При выполнении каждой машинной команды процессор должен выполнить как минимум три действия: выборку, декодирование и выполнение. Если в команде используется операнд, расположенный в оперативной памяти, то процессору придётся выполнить ещё две операции: выборку операнда из памяти и запись результата в память. Ниже описаны эти пять операций.
- Выборка команды . Блок управления извлекает команду из памяти (из очереди команд), копирует её во внутреннюю память процессора и увеличивает значение счётчика команд на длину этой команды (разные команды могут иметь разный размер).
- Декодирование команды . Блок управления определяет тип выполняемой команды, пересылает указанные в ней операнды в АЛУ и генерирует электрические сигналы управления АЛУ, которые соответствуют типу выполняемой операции.
- Выборка операндов . Если в команде используется операнд, расположенный в оперативной памяти, то блок управления начинает операцию по его выборке из памяти.
- Выполнение команды . АЛУ выполняет указанную в команде операцию, сохраняет полученный результат в заданном месте и обновляет состояние флагов, по значению которых программа может судить о результате выполнения команды.
- Запись результата в память . Если результат выполнения команды должен быть сохранён в памяти, блок управления начинает операцию сохранения данных в памяти.
Суммируем полученные знания и составим цикл выполнения команды:
- Выбрать из очереди команд команду, на которую указывает счётчик команд.
- Определить адрес следующей команды в очереди команд и записать адрес следующей команды в счётчик команд.
- Декодировать команду.
- Если в команде есть операнды, находящиеся в памяти, то выбрать операнды.
- Выполнить команду и установить флаги.
- Записать результат в память (по необходимости).
- Начать выполнение следующей команды с п.1.
Это упрощённый цикл выполнения команды. К тому же действия могут отличаться в зависимости от процессора. Однако это даёт общее представление о том, как процессор выполняет одну машинную команду, а значит и программу в целом.
Рассмотрим процесс выполнения процессором команды для коротких (с фиксированной запятой или логические) операций. Как об этом говорилось выше, обработка команды, или цикл процессора, может быть разделена на несколько основных этапов, которые можно назвать микрокомандами, которых известно пять основных типов.
Каждая операция требует для своего выполнения времени, равного такту генератора процессора ( tick of the internal clock). Отметим, что к длинным операциям (плавающая точка) это не имеет отношения — там другая арифметика. Очевидно, что при тактовой частоте в 100 МГц быстродействие составит 20 миллионов операций в секунду.

Все этапы команды задействуются только один раз и всегда в одном и том же порядке: одна за другой. Это, в частности, означает, что если первая микрокоманда выполнила свою работу и передала результаты второй, то для выполнения текущей команды она больше не понадобится, и, следовательно, может приступить к выполнению следующей команды.
Конвейеризация осуществляет многопоточную параллельную обработку команд, так что в каждый момент одна из команд считывает-ся, другая декодируется и т. д., и всего в обработке одновременно находится пять команд. Таким образом, на выходе конвейера на каждом такте процессора появляется результат обработки одной команды (одна команда в один такт). Первая инструкция может считаться выполненной, когда завершат работу все пять микрокоманд.
Такая технология обработки команд носит название конвейерной ( pipeline) обработки. Каждая часть устройства называется ступенью конвейера, а общее число ступеней — длиной линии конвейера.

С ростом числа линий конвейера и увеличением числа ступеней на линии (табл. ) увеличивается пропускная способность процессора при неизменной тактовой частоте. Процессоры с несколькими линиями конвейера получили название суперскалярных. Pentium — первый суперскалярный процессор Intel. Здесь две линии, что позволяет ему при одинаковых частотах быть вдвое производительней i80486, выполняя сразу две инструкции за такт.
Во многих вычислительных системах, наряду с конвейером команд, используются конвейеры данных.
Сочетание этих двух конвейеров дает возможность достичь очень высокой производительности на определенных классах задач, особенно если используется несколько различных конвейерных процессоров, способных работать одновременно и независимо друг от друга.
Одной из наиболее высокопроизводительных вычислительных конвейерных систем считается CRAY. В этой системе конвейерный принцип обработки используется в максимальной степени. Имеется как конвейер команд, так и конвейер арифметических и логических операций. В системе широко применяется совмещенная обработка информации несколькими устройствами. Максимальная пиковая производительность процессора может составлять 12 Гфлопс.
Матричные и векторные процессоры
В отличие от скалярных и даже суперскалярных процессоров данные устройства манипулируют массивами данных и предназначены для обработки изображений, матриц и массивов данных. Частным случаем векторного процессора является процессор изображений, который предназначен для обработки сигналов, поступающих
от датчиков-формирователей изображения.
Матричный процессор имеет архитектуру, рассчитанную на обработку числовых массивов. Архитектура процессора включает в себя матрицу процессорных элементов, например 64 х 64, работающих одновременно. Постпроцессор предназначен для реализации некоторых специальных функций, например управления базой данных.
Векторный процессор обеспечивает параллельное выполнение операции над массивами данных, векторами. Он характеризуется
специальной архитектурой, построенной на группе параллельно работающих процессорных элементов (рис ).

Векторная обработка увеличивает производительность процессора за счет того, что обработка целого набора данных (вектора)
производится одной командой. Векторные компьютеры манипулируют массивами сходных данных подобно тому, как скалярные машины обрабатывают отдельные элементы таких массивов. В этом случае каждый элемент вектора надо рассматривать как отдельный
элемент потока данных. При работе в векторном режиме векторные процессоры обрабатывают данные практически параллельно, что делает их в несколько раз более быстрыми, чем при работе в скалярном режиме. Максимальная скорость передачи данных в векторном формате может составлять 64 Гбайт/с, что на два порядка быстрее, чем в скалярных машинах.
В настоящее время созданы однокристальные векторно-конвей-ерные процессоры, такие, как SX-6. Основными компонентами микропроцессора являются скалярный процессор и восемь идентичных векторных устройств, суммарная производительность которых составляет 64 Гфлопс. Примерами систем подобного типа являются, например, процессоры фирм NEC и Hitachi. Динамическое исполнение (Dynamic execution technology)
Это совокупность технологий обработки данных в процессоре,
обеспечивающая более эффективную работу процессора за счет манипулирования данными, а не простого исполнения списка инструкций.
Динамическое исполнение представляет собой-комбинацию трех методов обработки данных:
множественное предсказание ветвлений;
анализ потока данных;
спекулятивное (по предположению) исполнение. Впервые реализовано в процессоре Pentium Pro.
Множественное предсказание ветвлений. Предсказывается прохождение программы по нескольким ветвям: процессор может предвидеть разделение потока инструкций, используя алгоритм множественного предсказания ветвлений. С большой точностью (более 90 %) он предсказывает, в какой области памяти можно найти следующие инструкции. Это оказывается возможным, поскольку в процессе исполнения иструкции процессор просматривает программу на несколько шагов вперед. Этот метод позволяет увеличить загруженность процессора.
Хотя ВТВ ( Branch Target Buffer — буфер предсказания переходов) и не может правильно предсказать абсолютно все переходы, но
большинство предсказаний оказывается точными, что обеспечивает
значительное повышение производительности. Например, программный цикл, состоящий из пересылки, сравнения, сложения и перехода в 80486 DX выполняется за 6 тактов синхронизации, а в Pentium за 2 ( команды пересылки и сложения, а также сравнения и перехода сочетаются и предсказывается переход).
Анализ потока данных. Анализирует и составляет график исполнения инструкций в оптимальной последовательности,
независимо от порядка их следования в тексте программы. Используя анализ потока данных, процессор просматривает декодированные инструкции и определяет, готовы ли они к непосредственному исполнению или зависят от результата других инструкций. Далее процессор определяет оптимальную последовательность выполнения и исполняет инструкции наиболее эффективным образом.
Спекулятивное выполнение. Повышает скорость выполнения, просматривая программу вперед и исполняя те инструкции, которые необходимы. Процессор выполняет инструкции (до пяти инструкций одновременно) по мере их поступления в оптимизированной последовательности (спекулятивно). Поскольку выполнение инструкций происходит на основе предсказания ветвлений, результаты сохраняются как « спекулятивные ». На конечном этапе порядок инструкций восстанавливается и переводится в обычное машинное состояние.
Процессоры уровня IA-64 имеют мощные вычислительные ресурсы, включая 128 регистров целых чисел, 128 регистров действительных чисел, 64 предиксщионных регистра, а также ряд специальных регистров.
Набор команд оптимизирован для решения задач криптографии, обработки видеосигналов и других процессов, встречающихся в серверах и рабочих станциях.
Представлены иллюстрации к возможностям архитектуры IA-64:
· предикация ( predication) — одновременное исполнение двух ветвей программы, вместо предсказания переходов (выполнения наиболее вероятного);
· опережающее чтение данных ( speculative loading), т. е. загрузка данных в регистры с опережением, до того, как определилось реальное ветвление программы (переход управления). Эти возможности осуществляются комбинированно — при компиляции и выполнении программы.
Предикация — центральный метод планирования параллельной обработки. Компилятор транслирует операторы исходного кода, содержащие ветвление (условный переход), в совокупность блоковмашинных команд, идущих друг за другом. Обычный процессор, в зависимости от исхода условия, исполняет один из этих базовых блоков, пропуская все другие. Более развитые процессоры пытаются прогнозировать исход операции перехода и заранее (спекулятивно, по предположению) выполняют один из блоков, теряя время при ошибке прогнозирования.
Базовые блоки обычно малы ( 2 -3 команды) и ветвление встречается в среднем через каждые шесть операторов языка программирования. Поэтому выигрыш оказывается небольшим.
Когда компилятор уровня IA-64 обнаруживает оператор ветвления в исходной программе, он анализирует все возможные ветви (блоки) и помечает их метками или предикатами ( predicate). После этого он определяет, какие из них могут быть выполнены параллельно (из соседних, независимых, ветвей).

Технология Hyper-Threading (HT)
Здесь реализуется разделение времени на аппаратном уровне физически процессор разбивается на два логических процессора, каждый из которых использует ресурсы чипа — ядро, кэш-память, шины, исполнительное устройство Ядро процессора выполняет два процесса одновременно эффективности в 30 % при использовании на НТ-процессорах многопрограммных ОС и обычных прикладных программ
Что же представляют собой современные процессоры, в которых реализованы все эти « штучки », воочию 9 Рассмотрим рис 2 13 Процессор Pentium состоит из исполнительное устройство Производительность МП при тактовой частоте 66 МГц составляет около 112 млн инструкций в секунду ( Mips ) Пятикратное повышение (по сравнению с 80486 DX ) достигалось благодаря двум конвейерам, позволяющим выполнить одновременно несколько инструкций Это два параллельных 5- ступенчатых конвейера обработки целых чисел, которые позволяют читать, интерпретировать, исполнять две команды одновременно такт синхронизации Эти конвейеры неодинаковы U- конвейер выполняет любую команду системы команд семейства 86, V- конвейер выполняет только « простые » команды, т е команды, которые полностью встроены в схемы МП и не требуют микропрограммного управления ( microcode) при выполнении (это команды, допускающие спаривание с другими командами
регистр-память, переходы, вызовы, арифметико-логические операции)
Предсказатель переходов ( Branch Predictor) Пытается угадать направление ветвления программы и заранее загрузить информацию в блоки предвыборки и декодирования команд
Буфер адреса переходов ( Branch Target Buffer, BTB) Обеспечивает динамическое предсказание переходов Он улучшает выполнение команд путем запоминания состоявшихся переходов ( 256 последних переходов) и с опережением выполняет наиболее вероятный переход при выборке команды ветвления. Если предсказание верно, то эффективность увеличивается. Если нет, то конвейер приходится сбрасывать полностью. Согласно данным Intel, вероятность правильного предсказания переходов в процессорах Pentium, Pentium ММХ составляет 75-80 %, а для Pentium Pro, Pentium II - 90 %.
Статические методы предсказания упрощены — они предписывают всегда выполнять или нет определенные виды переходов. При динамических методах исследуется поведение команд перехода за
Блок плавающей точки ( Floating Point Unit). Выполняет обработку
чисел с плавающей точкой.
Кэш-память 1- го уровня ( Level 1 cache, L1). Процессор имеет два банка памяти по 8 Кбайт: 1- й — для команд, 2- й — для данных, которые обладают большим быстродействием, чем более емкая внешняя кэш-память ( L2 cache).
Интерфейс шины ( Bus Interface). Передает в ЦП поток команд и данных, а также передает данные из ЦП.
Здравствуй, мир! Сегодня у нас серия статьей для людей со средними знаниями о работе процессора в которой мы будем разбираться с процессорными архитектурами (у меня спелл чекер ругается на слово Архитектурами/Архитектур, надеюсь я пишу слово правильно), создавать собственную архитектуру процессора и многое другое.
Принимаются любые замечания!
Исторически сложилось, что существуют много процессоров и много архитектур. Но многие архитектуры имеют схожести. Специально для этого появились "Группы" архитектур типа RISC, CISC, MISC, OISC (URISC). Кроме того они могут иметь разные архитектуры адресации памяти (фон Неймана, Гарвард). У каждого процессора есть своя архитектура. Например большинство современных архитектур это RISC (ARM, MIPS, OpenRISC, RISC-V, AVR, PIC** и т.д.), но есть архитектуры которые выиграли просто за счет других факторов (Например удобство/цена/популярность/etc) Среди которых x86, x86-64 (Стоит отметить, что x86-64 и x86 в последних процессорах используют микрокод и внутри них стоит RISC ядро), M68K. В чем же их отличие?
Reduced Instruction Set Computer — Архитектура с уменьшенным временем выполнения инструкций (из расшифровка RISC можно подумать, что это уменьшенное количество инструкций, но это не так). Данное направления развилось в итоге после того, как оказалось, что большинство компиляторов того времени не использовали все инструкции и разработчики процессоров решили получить больше производительности использую Конвейеры. В целом RISC является золотой серединой между всеми архитектурами.
Яркие примеры данной архитектуры: ARM, MIPS, OpenRISC, RISC-V
Что такое TTA? ТТА это Архитектура на основе всего одной инструкции перемещения из одного адреса памяти в другую. Данный вариант усложняет работу компилятора зато дает большую производительность. У данной архитектуры есть единственный недостаток: Сильная зависимость от шины данных. Именно это и стало причиной ее меньшей популярности. Надо отметить что TTA является разновидностью OISC.
Яркие примеры: MOVE Project
Архитектура гарварда
Особенность этой архитектуры является отдельная шина данных и инструкций. Дает большую производительность чем фон Нейман за счет возможности за один такт использовать обе шины (читать из шины инструкций и одновременно записывать в шинну данных), но осложняет архитектуру и имеет некоторые ограничения. В основном используется в микроконтроллерах.
Расширение существующих архитектур
Достаточно популярной техникой является добавление в уже существующую архитектуру больше инструкций через расширения. Ярким примером является SSE под x86. Этим же грешит ARM и MIPS и практически все. Почему? Потому что нельзя создать унивирсальную архитектуру.
Другим вариантом является использование других архитектур для уменьшения размера инструкций.
Яркий пример: ARM со своим Thumb, MIPS с MIPS16.
В видеокартах часто встречается много ядер и из-за этой особенности появилась потребность в дополнительных решениях. Если конвейеры можно встретить даже в микроконтроллерах то решения используемых в GPU встречаются редко. Например Masked Execution (Встречается в инструкциях ARM, но не в Thumb-I/II). Еще есть другие особенность: это уклон в сторону Floating Number (Числа с плавающей запятой), Уменьшение производительности в противовес большего количества ядер и т.д.
PIC (PIE)
Что такое PIE? (PIC не использую для избежания путаницы с МК PIC). PIE это техника благодаря которой компилятор генерирует код который будет работать в любом месте в памяти. Эта техника в совмещении с MPU позволяет компилировать высокие языки программирования которые будут работать и с MPU.
Популярная техника SIMD используется для того, что бы за один такт выполнять несколько действий над несколькими регистрами. Иногда бывают в качестве дополнений к основной архитектуре, например, как в MIPS, ARM со своими NEON/VFP/etc, x86 со своим SSE2.
Это техника Используется для оптимизации кода, генерируемого компилятором, с помощью пересортировки инструкций, увеличивая производительность процессора. Это позволяет использовать конвейер на полную.

Что такое регистр статуса? Это регистр который хранит состояние процессора. Например находится ли процессор в привилегированном режиме, чем закончилась операция последнего сравнения.
Используется в связке с Masked Execution. Некоторые разработчики специально исключают регистр статуса ибо он может являться узким местом как поступили в MIPS.
В MIPS нет отдельной инструкции загрузки константы в память, но есть инструкция addi и ori которая позволяет в связке с нулевым регистром ($0) эмулировать работу загрузки константы в регистр. В других архитектурах она присутствует. Я затронул эту тему, потому что она пригодиться нам в статьях с практикой.
Идут множество споров насчет того сколько должно быть операндов в арифметических инструкциях. Например в MIPS используется вариант с 3-мя регистрами. 2 операнда, 1 регистр записи. С другой стороны, использование двух операндов позволяет сократить код за счет уменьшения размера инструкции. Пример совмещения является MIPS16 в MIPS и Thumb-I в ARM. В плане производительности они практически идентичны (Если исключать размер инструкции как фактор).
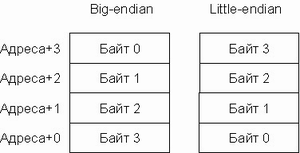
Порядок байт. Возможно вам знакомы Выражения Big-Endian и Little-Endian. Они описывают порядок байт в инструкциях/в регистрах/в памяти/etc. Здесь думаю все просто :). Есть процессоры которые совмещают режимы, как MIPS, или которые используют одну систему команд, но имеют разный порядок байт, например ARM.

Что такое сопроцессоры? Сопроцессоры являются элементами процессора или внешней микросхемой. Они позволяют исполнять инструкции, которые слишком громоздки для основной части процессора. Как яркий пример, сопроцессоры в MIPS для деления и умножения. Или например 387 для 80386, который добавлял поддержку чисел с плавающей запятой. А в MIPS сопроцессоров было много и они выполняли свои роли: контролировали прерывания, исключения и системные вызовы. Часто сопроцессоры имеют собственные инструкции и на системах, где этих инструкций нет, (пример ARM) эмулируют ее через Trap-ы (ловушки?). Несмотря на костыльность и маленькую производительность, они часто являются единственным выбором в микроконтроллерах.
Атомартность операций обеспечивает потоко-независимое исполнение за счет инструкций, которые выполняют несколько действий за один псевдотакт.
Вариант другого решения атомарность переферии. Например для установки ножки в STM32 в высокое и низкое состояние используется разные регистры, что позволяет иметь атомарность на уровне переферии.

Вы, навярняка, слышали о L1, L2, L3 и регистрах. Если коротко, процессор анализирует часть кода, чтобы предугадать прыжки и доступ в память и зараннее просит кеш получить эти данные из памяти. Кеш зачастую бывает прозрачным для программы, но бывают и исключения из этого правила. Например, в программных ядрах в ПЛИС используется програмный кеш.
И вы кончено слышали о такой вещи, как Cache Miss или промах по кешу. Это операция которая не была предусмотрена процессорам или процессор не успел закешировать эту часть памяти. Что достаточно часто является проблемой замедления доступа к памяти. Промах проходит незаметно для программы, но не останутся незаметными просадки в производительности.Так же переключения контекстов например при прерываниях тоже заставляет страдать кеш ибо небольшой код сбивает конвейер и кеш для собственных нужд.
В современных процессорах часто используется техника теневых регистров. Они позволяют переключаться между прерываниями и пользовательским кодом практически без задержек связанных с сохранением регистров.

Спросите тогда что такое куча (Heap)? Куча это память размером намного больше чем стек (Стек обычно ~1MB). В хипе храниться все глобальное. Например все указатели полученные с помощю Malloc указывают на часть куча. А указатели хранятся в стеке или в регистрах. С помощью инструкций загрузки данных относительно регистра можно ускорить работу стека и других доступов к памяти по типу стека, поскольку не нужно постоянно использовать операции PUSH/POP, INC/DEC или ADDI, SUBI (добавить константу), чтобы получить данные глубже по стеку, а можно просто использовать доступ относительно стека с отрицательным смещением.

Не буду описывать регистры слишком подробно. Это мы затронем в практической статье.
В x86 регистров достаточно мало. В MIPS используется увеличенное количество регистров, а именно 31 ($0 имеет значение всегда равное нулю). В процессоре университета Беркли использовались регистровые окна, которые жестки ограничивали вложенность функций, при этом имея лучшую производительность. В других же, таких как AVR, ограничили использование регистров. Для примера: три 16-битных можно трактовать как шесть восьмибитных, где первые 16ть недоступны при некоторых операциях. Я считаю, что лучший метод был выбран MIPS-ом. Это мое сугубо личное мнение.
Что такое выравнивание? Оставлю-ка я этот вопрос вам :)
Это конец первой главы нулевой части. Вся серия будет крутиться вокруг темы создания собственного процессора. Собственной операционной системы. Собственного ассемблера. Собственного компилятора и много чего другого.
Нулевые части будут посвящены теории. Я сомневаюсь что доведу всю серию до победного конца, но попытка не пытка! )
Прерывания
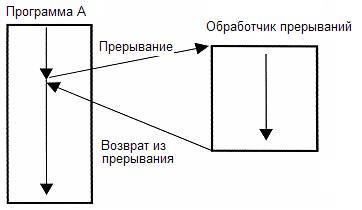
Прерывания это техника при которой исполняемый в данный момент код приостанавливается для выполнения какой-то другой задачи при каких-то условиях. Например при доступе в несуществующий участок памяти вызывается HardFault или MemoryFault прерывания или исключения. Или например если таймер отсчитал до нуля. Это позволяет не бездействовать пока нужно ждать какое-то событие.
Какие недостатки? Вызов прерывания это несколько тактов простоя и несколько при возврате из прерывания. Так же несколько инструкций в начале кода будет занято инструкциями для Таблицы прерываний.
Exception (исключения)
Но кроме прерываний еще существуют исключений которые возникают например при деления на ноль. Зачастую его совмещают с прерываниями и системными вызовами, как например в MIPS. Исключения не всегда присутствуют в процессоре например как в AVR или младших PIC
Конвейеры
Что такое конвейеры? Если сказать очень глупым языком это несколько параллельных действий за один такт. Это очень грубо, но при этом отображает суть. Конвейеры за счет усложнения архитектуры позволяют поднять производительность. Например конвейер позволяет прочитать инструкцию, исполнить предыдущую и записать в шину данных одновременно.

На картинке более понятно, не правда?
IF — получение инструкции,
ID — расшифровка инструкции,
EX — выполнение,
MEM — доступ к памяти,
WB — запись в регистр.
Вроде все просто? А вот и нет! Проблема в том что например прыжок (jmp/branch/etc) заставляют конвейер начать исполнение (получение след. инструкции) заново таким образом вызывая задержку в 2-4 такта перед исполнение следующей инструкции.
Два основных компонента процессора
Системные вызовы
Системные вызовы используется в Операционных системах для того, чтобы программы могли общаться с операционной системой например просить ОС прочитать файл. Очень похоже на прерывания. Аналогично исключениям не всегда присутствуют в процессоре
Здесь описываются методы запрета доступа приложений к аппаратуре напрямую.
MPU и MMU

MPU и MMU используется в современных системах чтобы изолировать несколько приложений. НО если MMU позволяет "передвинуть" память то MPU позволяет только блокировать доступ к памяти/запуск кода в памяти.
Выполнение инструкций
Инструкции хранятся в ОЗУ в последовательном порядке. Для гипотетического процессора инструкция состоит из кода операции и адреса памяти/регистра. Внутри управляющего устройства есть два регистра инструкций, в которые загружается код команды и адрес текущей исполняемой команды. Ещё в процессоре есть дополнительные регистры, которые хранят в себе последние 4 бита выполненных инструкций.
Ниже рассмотрен пример набора команд, который суммирует два числа:
- LOAD_A 8 . Это команда сохраняет в ОЗУ данные, скажем, . Первые 4 бита — код операции. Именно он определяет инструкцию. Эти данные помещаются в регистры инструкций УУ. Команда декодируется в инструкцию load_A — поместить данные 1000 (последние 4 бита команды) в регистр A .
- LOAD_B 2 . Ситуация, аналогичная прошлой. Здесь помещается число 2 ( 0010 ) в регистр B .
- ADD B A . Команда суммирует два числа (точнее прибавляет значение регистра B в регистр A ). УУ сообщает АЛУ, что нужно выполнить операцию суммирования и поместить результат обратно в регистр A .
- STORE_A 23 . Сохраняем значение регистра A в ячейку памяти с адресом 23 .
Вот такие операции нужны, чтобы сложить два числа.
Все данные между процессором, регистрами, памятью и I/O-устройствами (устройствами ввода-вывода) передаются по шинам. Чтобы загрузить в память только что обработанные данные, процессор помещает адрес в шину адреса и данные в шину данных. Потом нужно дать разрешение на запись на шине управления.

У процессора есть механизм сохранения инструкций в кэш. Как мы выяснили ранее, за секунду процессор может выполнить миллиарды инструкций. Поэтому если бы каждая инструкция хранилась в ОЗУ, то её изъятие оттуда занимало бы больше времени, чем её обработка. Поэтому для ускорения работы процессор хранит часть инструкций и данных в кэше.
Если данные в кэше и памяти не совпадают, то они помечаются грязными битами (англ. dirty bit).
Тактирование процессора
Быстродействие компьютера определяется тактовой частотой его процессора. Тактовая частота — количество тактов (соответственно и исполняемых команд) за секунду.
Частота нынешних процессоров измеряется в ГГц (Гигагерцы). 1 ГГц = 10⁹ Гц — миллиард операций в секунду.
Чтобы уменьшить время выполнения программы, нужно либо оптимизировать (уменьшить) её, либо увеличить тактовую частоту. У части процессоров есть возможность увеличить частоту (разогнать процессор), однако такие действия физически влияют на процессор и нередко вызывают перегрев и выход из строя.
OISC (URISC)?
One Instruction Set Computer — Архитектура с единственной инструкцией. Например SUBLEQ. Такие архитектуры часто имеют вид: Сделать действие и в зависимости от результата сделать прыжок или продолжить исполнение. Зачастую ее реализация достаточно простая, производительность маленькая, при этом снова ограничение шиной данных.
Яркие примеры: BitBitJump, ByteByteJump, SUBLEQ тысячи их!
CISC — Complex Instruction Set Computer — ее особенность в увеличенных количествах действий за инструкцию. Таким образом можно было теоретически увеличить производительность программ за счет увеличения сложности компилятора. Но по факту у CISC плохо были реализованы некоторые инструкции т.к. они редко использовались, и повышение производительности не было достигнуто. Особенностью этой группы является еще ОГРОМНАЯ Разница между архитектурами. И несмотря на названия были архитектуры с маленьким количеством инструкций.
Яркие примеры: x86, M68K
Устройство управления
Устройство управления (УУ) помогает процессору контролировать и выполнять инструкции. УУ сообщает компонентам, что именно нужно делать. В соответствии с инструкциями он координирует работу с другими частями компьютера, включая второй основной компонент — арифметико-логическое устройство (АЛУ). Все инструкции вначале поступают именно на устройство управления.
Существует два типа реализации УУ:
- УУ на жёсткой логике (англ. hardwired control units). Характер работы определяется внутренним электрическим строением — устройством печатной платы или кристалла. Соответственно, модификация такого УУ без физического вмешательства невозможна.
- УУ с микропрограммным управлением (англ. microprogrammable control units). Может быть запрограммирован для тех или иных целей. Программная часть сохраняется в памяти УУ.
УУ на жёсткой логике быстрее, но УУ с микропрограммным управлением обладает более гибкой функциональностью.
Masked Execution
Данный режим отличается от классических тем, что инструкции исполняются последовательно без использования прыжков. В инструкции хранится некоторое количество информации о том при каких условия эта инструкция будет исполнена и если условие не соблюдено то инструкция пропускается.
Ответ прост! Что бы не нагружать шину инструкций. Например в видеокартах можно загрузить тысячи ядер одной инструкцией. А если бы использовалась система прыжков то пришлось бы для каждого ядра ждать инструкцию из медленной памяти. Кеш частично решает проблему, но все еще не решает проблему полностью.
Здесь мы будем описывать несколько техник используемых в центральный процессорах и микроконтроллерах.
Читайте также: