
Мощный лабораторный блок питания с повышенным кпд и защитой на мк
Не так давно приобрёл паяльную станцию. Давно занимаюсь любительской электроникой, и вот настал момент когда точно осознал что пора. До этого пользовался батиным самопальным блоком, совмещавшим лабораторный блок питания и блок питания низковольтного паяльника. И вот встала передо мной проблема: паяльную станцию я ставлю, а старый блок держать ради хилого и не точного блока питания 0-30в 3А или таки купить нечто современное, с защитой по току и цифровыми индикаторами? Поползав по ебею понял что максимум что мне светит это за 7-10 тыс купить Китайский блок с током максимум в 5А. Жаба сказала своё веское «ква», руки зачесались и…
Теперь к сути. Сформировал требования к блоку: минимум 0-30В, при токах минимум 10А, с регулируемой защитой по току, и с точностью регулировки по напряжению 0.1В. И что б стало ещё интереснее — 2 канала, пусть и от общей земли. Установка напряжения должна быть цифровой, т.е. никаких переменных резисторов, только энкодеры. Фиксированные установки напряжения и запоминание — опционально.
Для индикации состояния выхода были выбраны цифровые китайские комбинированные индикаторы на ЖК, с диапазоном до 199В с точностью 0.1В и до 20А с точностью 0.01А. Что меня полностью устроило. А вот что забыл, так это прикупить к ним шунты, т.к. по наивности думал что они будут в комплекте.
Для первичного преобразования напряжения думал использовать обычный трансформатор с отводами через каждые 6В, коммутируемый релюшками с контроллера, а для регулировки выхода простой эмиттерный повторитель. И всё бы ничего, но когда узнал стоимость и габариты такого трансформатора (30В * 10А = 300вт), то понял что надо быть современнее и использовать импульсные блоки питания.
Пробежавшись по предложениям понял что ничего толкового на мои токи нет, а если и есть, то жаба категорически против. В связи с этим пришла мысль попробовать использовать компьютерные блоки питания, коих всегда у любого ITшника предостаточно. Были откопаны блоки по 350Вт, что обещало 22А по +5В ветке и 16А по 12В. Пробежавшись по интернету нашёл много противоречивых мнений по поводу последовательного соединения блоков, и нашёл умную статью на Радиокоте как это сделать правильно. Но перед этим решил рискнуть и таки взять и нахрапом соединить блоки последовательно, дав нагрузку.
… И получилось!
На фото последовательно соединены 3 блока. Де-факто на выходе 35В, 10.6А.

Далее возник вопрос: каким контроллером управлять. По идее ATMega328 тут идёт за глаза, но ЦАПы… Посчитав почём обойдётся хотя б 2 ЦАПа на 12 бит и посмотрев характеристики Arduino DUE с ними на борту, а так же сравнив кол-во требуемых ПИНов, понял что проще и дешевле и быстрее будет просто поставить эту ардуину в блок целиком, вместе с платой.
Постепенно на макетках родилась схема. Приведу её в общем виде, только для одного канала:
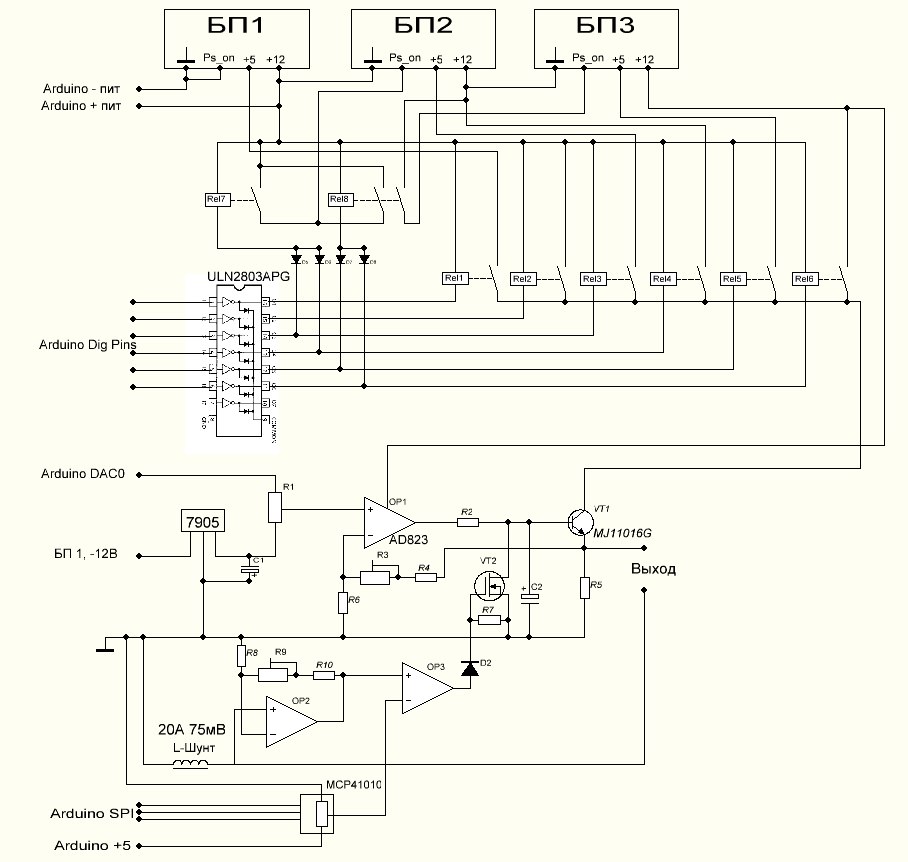
Схема бьётся на несколько функциональных блоков: Набор блоков питания ATX, блок коммутации БП, блок усилителя напряжения ЦАП Arduino, блок усилителя напряжения токового шунта, блок ограничения напряжения по заданному току.
Блок коммутации БП: В зависимости от заданного пользователем напряжения Ардуино выбирает какую ветку задействовать. Выбирается минимальная по напряжению ветка, на минимум +3В большая заданного. 3В остаются на неточности установки напряжения в блоках питания + ~1.2В просада напряжения на переходах транзистора + не большой запас. Одновременно задействованный ключ ветки активирует тот или иной блок питания. Например задав 24В надо активировать все 3 блока питания и подключить выход на +5в 3-го в цепочке, что даст на коллекторе выходного транзистора VT1 +29В, тем самым минимизируя выделяемую тепловую мощность транзистора.
Блок усилителя напряжения: Реализован на операционном усилителе OP1. ОУ используется Rail-to-Rail, однополярый, с большим напряжением питания, в моём случае — AD823. Причём выход ЦАП Ардуино имеет смещение нулевой точки = 0.54В. Т.е. если Вы задаёте напряжение выхода = 0, на выходе де-факто будет присутствовать 0.54В. Но нас это не устраивает, т.к. ОУ усиливает с 0, и напряжение тоже хочется регулировать с 0. Поэтому применён подстроечный резистор R1, вычитающий напряжение. А отдельный стабилизатор на -5В, вместо использования -5В ветки блока питания, используется ввиду нестабильности выдаваемого блоком питания напряжения, меняющимся под нагрузкой. Выход же ОУ охвачен обратной связью с выхода VT1, это сделано что б ОУ сам компенсировал изменения напряжения в зависимости от нагрузки на выходе.
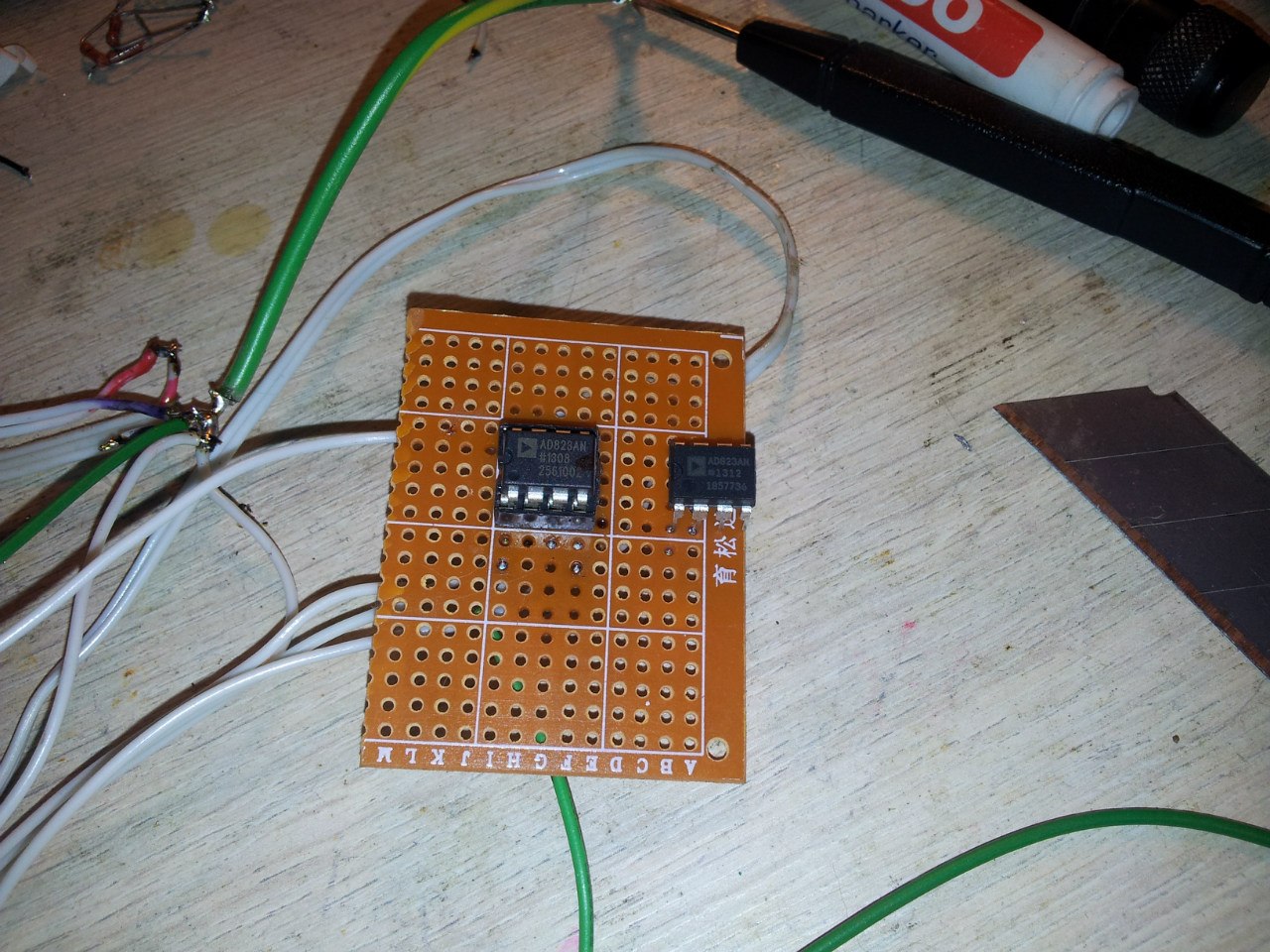
Кстати, о AD823 из Китая по Ебею: день промучился, понять не мог, почему схема не работает от 0 на входе. Если больше 1.5В то всё становится нормально, а иначе всё напряжение питания. Уже подумав что сам дурак, нарвался на рассказ как человек вместо AD823 получил с Китая подделку. Тут же поехал в соседний магазин, купил там, поставил и… О чудо — всё сразу заработало как надо. Игра, найди отличия (подделка в кроватке, справа оригинал. Забавно что подделка выглядит лучше):
Далее усилитель напряжение токового шунта. Поскольку токовый шунт достаточно мощный, то и падение напряжения на нём мало, особенно на малых токах. Поэтому добавлен OP2, служащий для усиления напряжения падения шунта. Причём от быстродействия этого ОУ зависит скорость срабатывания предохранителя.
Сам предохранитель, а точнее блок ограничения тока, реализован на компараторе OP2. Усиленное напряжение, соответствующее протекаемому току, сравнивается с напряжением, установленным электронным потенциометром и если оно выше — компаратором открывается VT2, и тот сбрасывает напряжение на базе выходного транзистора, по сути выключая выход. В работе это выглядит так:

Теперь к тому, почему в качестве шунта у меня дроссель. Всё просто: как я писал раньше — я просто забыл заказать шунты. А когда уже собирал блок и это выявилось, то ждать с Китая показалось долго, а в магазине дорого. Поэтому не долго думая, порылся в распайке старых компьютерных блоков питания и нашёл дроссели, почти точно подошедшие по сопротивлению. Чуть подобрал и поставил. Дополнительно же это даёт защиту: В случае резкого изменения нагрузки, дроссель сглаживает ток на время, достаточное что б успел отработать ограничитель тока. Это даёт отличную защиту от КЗ, но есть и минус — импульсные нагрузки «сводят блок с ума». Впрочем, для меня это оказалось не критично.
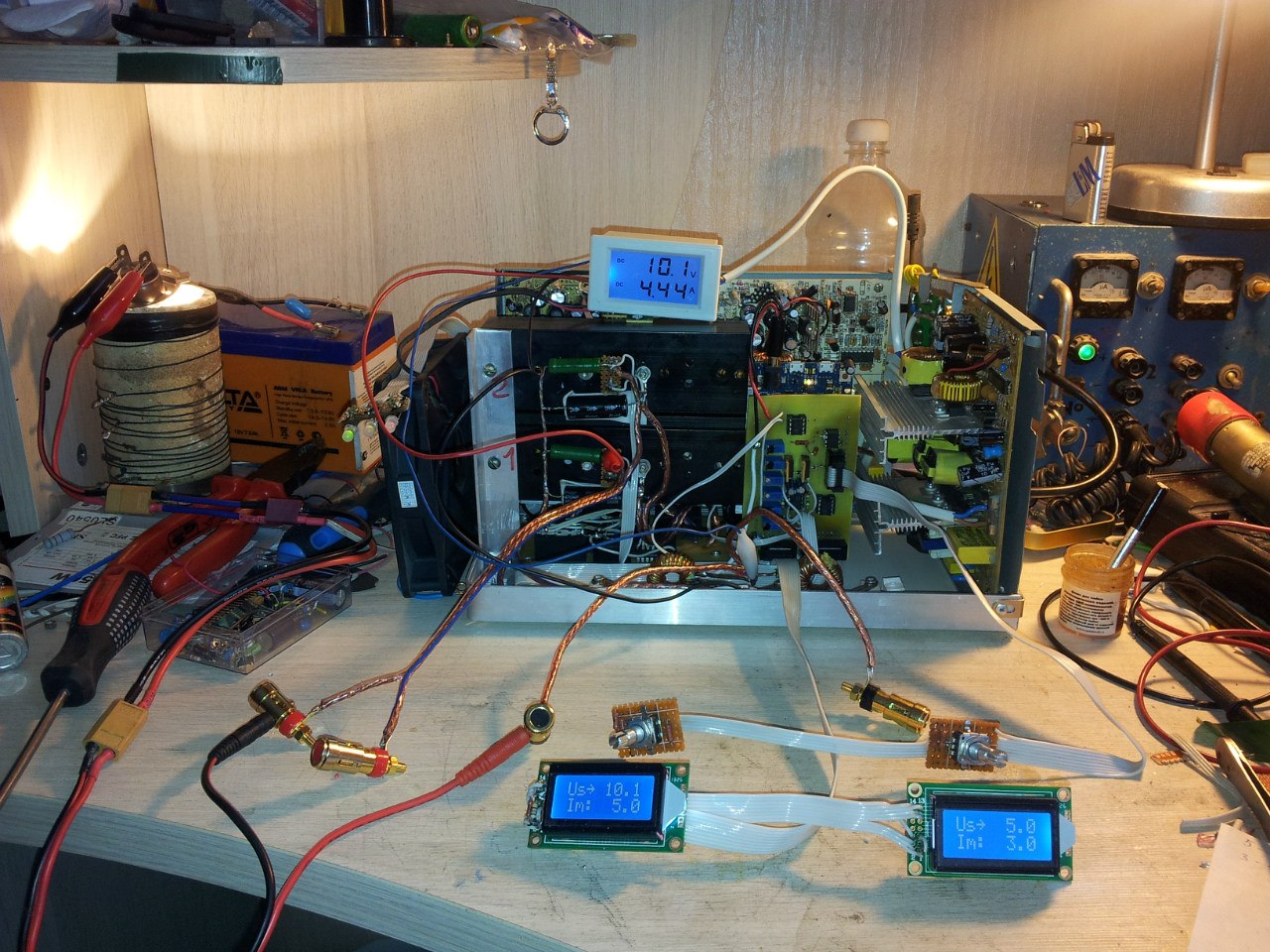
В итоге у меня получился вот такой блок питания:
Надписи на лицевой части сделаны с помощью ЛУТа. Индикаторы работы блоков питания выведены на 2-х цветный светодиод. Где красный запитан от дежурных +5в и показывают что блок готов к работе. А зелёный от Power_Good, и показывает что блок задействован и исправен. В свою очередь транзисторная развязка обеспечивает гашение красного светодиода и если у блока проблема — потухнет и красный и зелёный:

Маленькие экраны показывают заданные параметры, большие — состояние выхода де-факто. Энкодерами вращением устанавливается напряжение, короткое нажатие — вкл/выкл нагрузки, длинное — выбор режима установки напряжения/максимального тока. Ток ограничен 12.5А на канал. Реально в сумме 15 снимается. Впрочем — на той же элементной базе, с заменой блоков питания на нечто 500-т Ваттное, можно снимать и по 20. Не знаю, стоит ли приводить тут код скетча, простыня большая и достаточно глупая, + везде торчат хвосты под недоделанный функционал вроде коррекции выходного напряжения по АЦП обратной связи и регулировки скорости вентилятора.
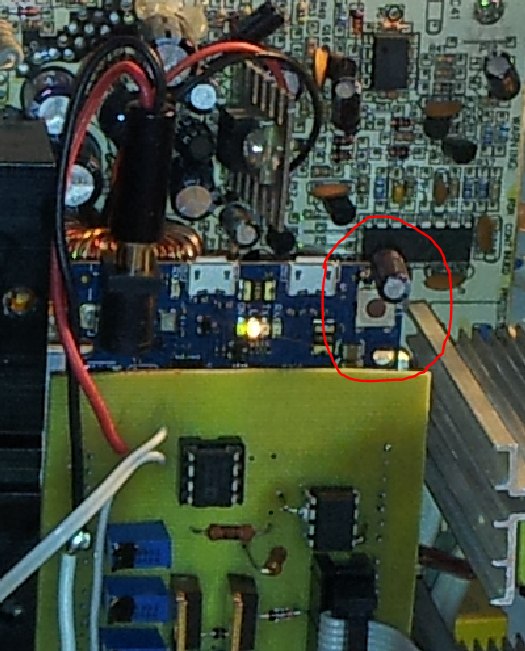
Напоследок, пара слов. Оказалось что Arduino DUE при включении после длительного простоя может не начать выполнять программу. Т.е. включаем плату, думаем что сейчас начнёт выполняться наша программа, а в ответ тишина, пока не нажмёшь reset. И всё бы ничего, но внутри корпуса reset нажимать несколько затруднительно.
Поискал по форуму, несколько человек столкнулось с такой же проблемой, но решения не нашли. Ждут когда разработчики поправят проблему. Мне ждать было лениво, поэтому пришлось решать проблему самому. А решение нашлось до безобразия примитивное, впаять электролитический конденсатор на 22мкФ в параллель кнопке. В результате, на момент запуска, пока идёт заряд этого конденсатора, имитируется нажатие кнопки reset. Отлично работает, прошиваться не мешает:
В заключение:
По-хорошему надо повесить на все радиаторы датчики температуры и регулировать скорость вентилятора в зависимости от температуры, но пока меня устроила и платка регулятора скорости вентилятора из какого-то FSPшного блока питания.
Ещё хотелось бы через АЦП обратную связь с блоком коммутации на случай залипания релюшки, а так же обратную связь по выходу, дабы компенсировать температурный дрейф подстроечных резисторов (в пределах 0.1в на больших напряжениях бывают отклонения).
А вот кнопки памяти и фиксированные настройки по опыту использования кажутся чем-то не нужным.
В этой статье я хотел бы рассказать о своем лабораторном БП, за основу которого была взята схема «Простой и доступный БП». Вариантов этого устройства довольно много, авторы постоянно что-то добавляют, вносят изменения, на тот момент, когда я начал собирать, последней версией была v 13. Однако я немного изменил схему, в свою пользу, т.к. планировал использовать БП на большие токи и хотел добавить схему переключения обмоток трансформатора. Вот схема оригинал:

В своем варианте я убрал «Индикатор перегрузки» на DA 1.3 и «Схему измерителя тока» на DA 1.4 и т.к. теперь два ОУ освободились, я решил на них же собрать «Схему переключения обмоток трансформатора», но об этом позже. Из-за этого была изменена схема стабилизации +12В для микросхемы ОУ, был использован отдельный источник питания со стабилизатором 7812. Также добавил силовых транзисторов, вместо одного 2N3055 я поставил пару 2SC5200. Максимальный отдаваемый ток теперь 5,6А. Вот мой вариант схемы:

В итоге мой вариант регулирует напряжение от 0 до 25В и может ограничивать максимальный ток на уровне от 0,01А до 5,6А. Для окончательной настройки схемы нужно установить максимальное напряжение резистором R13 и подобрать резисторы R14 и R16 для макс. и мин. тока соответственно.
Управление обмотками трансформатора
Бывают такие случаи,что нужно подключить к ЛБП какую-то низковольтную нагрузку, но с довольно большим током, например 5В при токе 5А. Тогда получается, что на силовых транзисторах будет падать несколько десятков вольт. К примеру после диодного моста и конденсатора в фильтре у нас 30В, а на выходе ЛБП всего 5В, значит на транзисторе будет падать 25В, и это при токе в 5А, получается, что бедный транзистор как-то должен превратить 125Вт просто в тепло. Одному мощному транзистору это не под силу, просто напросто произойдет тепловой пробой и он выйдет из строя, да и двум тяжко будет. На этой случай придумана схема, которая переключает обмотки трансформатора в зависимости от выходного напряжения ЛБП. К примеру, если нужно 5В, то зачем подавать на ЛБП 30В?
Ниже изображена схема переключения обмоток:
У меня же сам ЛБП и «схема переключения» собраны на одной плате. Переключение обмоток происходит при напряжениях на выходе 12В и 18В. Настройка схемы сводится к установке нужных напряжений переменными резисторами. Резистором R2 устанавливается деление выходного напряжения на 10, т.е. если на выходе ЛБП 25В, то на среднем выводе R2 (ползунке) должно быть 2,5В. Далее устанавливаем пороги срабатывания реле. Например у меня при 12В срабатывает первое реле, значит на 2 ножке микросхемы нужно установить 1,2В, соответственно при 18В на 6 ножке устанавливаем 1,8В. Позже можно будет заменить переменные резисторы R3 и R5 на два постоянных, спаяв их как делитель напряжения.
Охлаждение
В качестве радиаторов были собраны экспериментальные варианты из алюминиевых карнизов для штор, профили прикручиваются винтами к алюминиевой пластине ( признаюсь, хотелось бы потолще) и естественно промазываются термопастой. Эффективность таких радиаторов довольна неплохая. В верхней крышке корпуса есть отверстия для охлаждения.
Ампервольтметры
В качестве измерителя напряжения и тока была использована довольно известная схема на специализированной м\с ICL7107. Я собирал по этой схеме:

Отдельное питание
Для питания индикации и микросхем LM324 в ЛБП используется отдельный трансформатор и стабилизаторы +5В и +12В.
О корпусе
Основой для корпуса стал кусок стеклотекстолита, толщиной около 6-7 мм. На нем все и собиралось, далее были прикручены передняя панель со всеми органами управления и индикацией и задняя с вентиляторами и сетевым разьемом. И сверху П–образная крышка, обклеенная синей самоклейкой.
Трансформаторы я использовал ТН 60. У них довольно мощные обмотки по 6,3В. Ток до 7А. По весу данный аппарат получился около 10кг.
Диодные мосты серии КВРС, 35-амперные, также посаженые на общий радиатор с силовыми транзисторами.
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн
Я сделал приспособление ДЛЯ СЕБЯ, а не для кого-то. МНЕ работать с ним удобно. Поделился результатом. Поэтому ваша критика мне абсолютно по барабану. Если кого-то натолкнет на полезные мысли - хорошо. Если нет - тоже ладушки.
"вести" дрель по жесткости одной оси, по диагонали параллелепипед режешь (два "клина" в итоге, как у оконщиков для крепежа стёкл) и смещаешь (точность до микрон, при надобности).

У меня 99,99 % отверстий - "на весу", так что за долгие годы уже выработалась практика сверлить точно куда нужно: на метр между отверстиями могу до пол миллиметра вывести точность сверления. К примеру: вешаешь метровое зеркало людям в ванной, миллиметр-два перекоса - и уже по плиточному шву это видно невооружённым взглядом. Потому и приходится сверлить максимально точно. Но вот если ещё и под плиткой не знамо что, то есть когда уже в стене сверло или бур уходит в сторону, тем самым смещая входное отверстие в плитке - спасают дюпеля со смещённым центром (многие думают что они бракованные, потому и не покупают их). А ними можно выровнять отверстия до 5 мм. Или другой пример: прикручиваешь какой-нибудь длинный светильник/полку/крючок/чтоугодно на самый край ЛДСП. Ошибёшься на миллиметр - и будет некрасиво торчать край, или слишком смещено. Потому и нужно просверлить максимально точно. А зная, что легко уводит - делаю как описывал выше. А за "хлопоты" - люди доплачивают обычно, ну или изначально цену объявляешь, потому что "можешь". И на самом деле много случаев всяких, когда нужно очень точно просверлить тютелька-в-тютельку.
с напыления из ламината? Вы предложили "затирать" металлом (сверло на реверс) пленку из акриловых или меламиновых смол, наверное, как вариант, если не много в штуках и с водичкой. хлопотно это и не гарантируется "на весу" хороший результат.

Мощный лабораторный блок питания с повышенным КПД и защитой на МК
Регулируемый блок питания - неотъемлемая часть радиолюбительской лаборатории. В журнале “Радио” было описано немало подобных устройств, однако некоторые из них имеют низкий КПД, дело в том, что чаще всего лабораторные блоки питания изготавливают на основе линейных стабилизаторов, поскольку устранить основной недостаток импульсных источников — повышенный уровень пульсаций — нередко очень сложно. Как правило, следствие подобного схемотехнического решения — повышенные потери мощности. Автор (С. КОРЕНЕВ, г Красноярск) предлагает свой вариант решения этой проблемы. Данный ЛБП состоит из двух основных частей, силового модуля и цифрового модуля измерения напряжения и тока с защитой. О каждой из этих частей будет рассказано отдельно.
И так силовая часть лабораторного блока питания.
Транзисторная оптопара U 1 поддерживает падение напряжения на линейном стабилизаторе примерно 1,5 V . Если падение напряжения на микросхеме увеличивается (например, вследствие увеличения входного напряжения), излучающий диод оптопары и, соответственно, фототранзистор открываются. ШИМ - контроллер выключается, закрывая коммутирующий транзистор. Напряжение на входе линейного стабилизатора уменьшится.
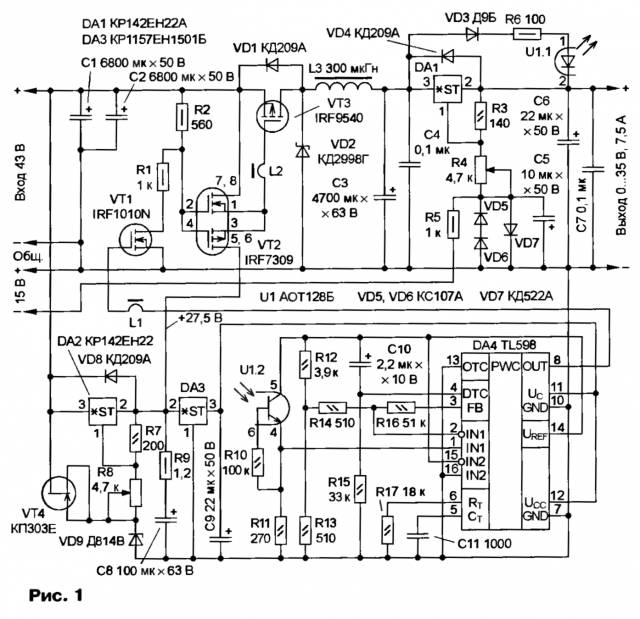
Для повышения стабильности резистор R З размещают как можно ближе к микросхеме стабилизатора DA 1 , дроссели L 1, L 2 — отрезки ферритовых трубок, надетых на выводы затворов полевых транзисторов VT 1, VT 3. Длина этих трубок равна примерно половине длины вывода. Дроссель L 3 наматывают на двух сложенных вместе кольцевых магнито-проводах К36х25х7.5 из пермаллоя МП 140. Его обмотка содержит 45 витков, которые намотаны в два провода ПЭВ-2 диаметром 1 мм , уложенных равномерно по периметру магнито-провода.
Поскольку при токе нагрузки, близком к максимальному, на стабилизаторе DA 1 и транзисторе VT З выделяется значительная мощность, их следует установить на тепло -отводы площадью не менее 30 см 2 . Транзистор IRF 9540 ( VT 3) допустимо заменить на IRF 4905 , а транзистор IRF 1010 N ( VT 1) на BUZ 11, IRF 540, КП727Б . Площадь, тепло - отводов, для конкретной сборки рассчитайте самостоятельно в интернете достаточно информации по данным методикам. Если потребуется блок с выходным током, превышающим 7,5 А, необходимо добавить еще один стабилизатор DA 5 параллельно DA 1 (рис. 2).
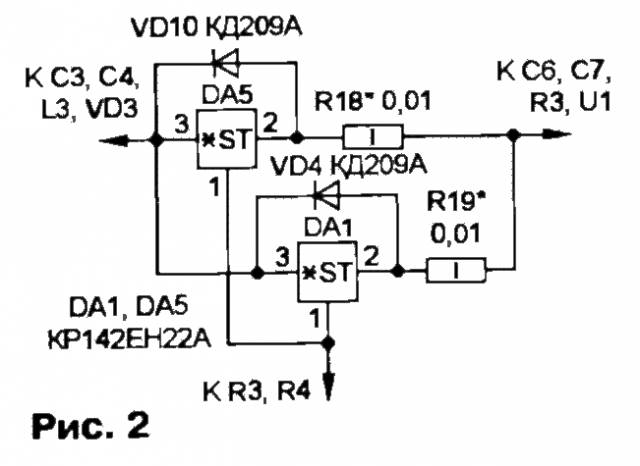
Тогда максимальный ток нагрузки достигнет 15 А.. В этом случае дроссель L 3 наматывают жгутом, состоящим из четырех проводов ПЭВ-2 диаметром 1 мм , и увеличивают примерно в два раза емкость конденсаторов С1, C 2 и С3. Резисторы R 18, R 19 подбирают по одинаковой степени нагрева микросхем DA 1, DA 5.ШИ - контроллер следует заменить другим, допускающим работу на более высокой частоте, например, КР1156ЕУ2.


Если ток нагрузки нужен порядка 10А., то М\С DA 4(TL598) можно оставил в схеме, но дроссель L3 намотать в 3 провода, и поставить вместо одной DA1( КР142ЕН22А) - 2 шт, как на рис 2. А конденсаторы С1, С2, С3 поставить на 10000 mF .
Если же необходимости в большом токе нагрузки нет, стабилизатор КР142ЕН22А можно заменить на КР142ЕН22 (максимальный ток 5 А) или кР142ЕН12А(1,5А).

Модуль цифрового измерения напряжения и тока лабораторного БП

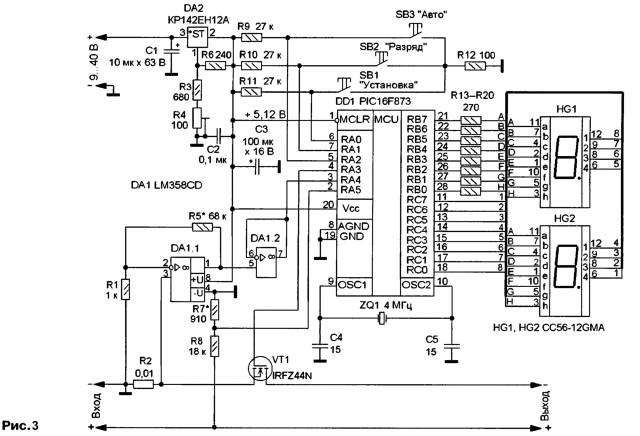
Как и оговаривалось выше, ЛБП состоит из двух частей. Пришло время немного рассказать о второй части т.е. цифровом модуле блока защиты с функцией измерения. Так же, как о силовой части описываемого БП, информация о блоке защиты с функцией измерения, печаталась в журнале «Радио» № 7. (Автор данной разработки: Н. ЗАЕЦ, п. Вейделевка Белгородской обл.)
Основой данного устройства – является микроконтроллер PICI6F873. На микросхеме DA2 собран стабилизатор напряжения, которое используется и как образцовое для встроенного АЦП микроконтроллера DD1. Линии порта RA0 и RA1 запрограммированы как входы АЦП для измерения напряжения и тока соответственно, а RA2 - для управления полевым транзистором. Датчиком тока служит резистор R2, а датчиком напряжения — резистивный делитель R7 R8. Сигнал датчика тока усиливает ОУ DA1.1, а ОУ DA1.2 использован как буферный усилитель.
Измерение напряжения, В - 0..50.
Измерение тока, А - 0.05..9,99.
Пороги срабатывания защиты:
- по току. А - от 0,05 до 9.99.
- по напряжению. В - от 0,1 до 50.
Напряжение питания, В - 9. 40.
Максимальный потребляемый ток, мА - 50.
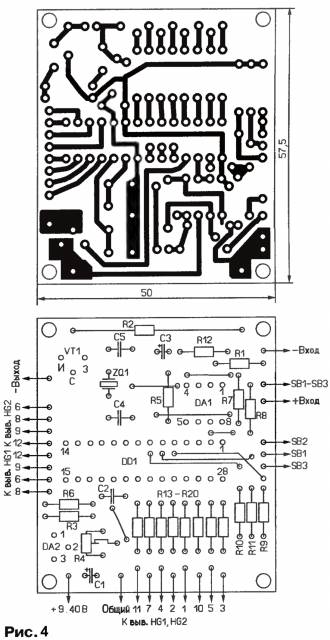
При нажатии на кнопку SB 3 “Авто” в режиме установки выполняется выход на рабочий режим, а в рабочем режиме — автоматическая установка защиты. В последнем случае значения тока и напряжения, при которых срабатывает защита, автоматически устанавливаются больше текущих значений напряжения и потребляемого тока на две единицы младшего разряда. Большинство деталей, кроме индикаторов, кнопок и разъемов смонтированы на печатной плате, чертеж которой показан на рис. 4.
Оксидные конденсаторы - К50-35 или аналогичные импортные, C 2 - К1О-17, К73-24, а ОУ DA 1 – КР140УД1. Светодиодные семиэлементные индикаторы могут быть любые с общим катодом или анодом, кнопки — малогабаритные с самовозвратом, например DTST -6, постоянные резисторы — МЛТ, C 2-22, подстроичный - СП5-16ВА-0,25. Резистор R 2 изготовлен из отрезка высокоомного провода, в авторском варианте использован резистор от вышедшего из строя мультиметра М-830. Полевой транзистор — мощный переключательный с n - каналом фирмы International Rectfier , желательно с буквой L в первой части названия, так как для его открывания достаточно напряжения 3,5. 5 В. При токах нагрузки более 5 А сопротивление открытого канала должно быть не более 0,01 Ом.


Работа с устройством.
Поскольку в память записаны максимальные значения тока и напряжения, при которых срабатывает защита, при первом включении прибора на 3 сек. появится изображение, которое показано на рис. 5.

По истечении этого интервала времени - изображение текущих значений напряжения и тока, например, как на рис. 6.

Если нажать на кнопку SB 3 “Авто” и отпустить, то на 3 сек. появится изображение установленных значений тока и напряжения срабатывания защиты (рис. 7).

Если защита до нажатия на кнопку SB 3 “Авто” была выключена, то она включится.
При нажатии на кнопку SB 1 “Установка” устройство переходит в режим установки и нажатиями на кнопку SB 2 “Разряд” выбирают разряд, в котором кнопкой “Установка” устанавливают нужную цифру. В четвертом и восьмом разрядах кнопкой “Установка” включают или выключают защиту по току и напряжению соответственно. Если индицируется буква “У”, то защита включена. для примера, на рис. 8
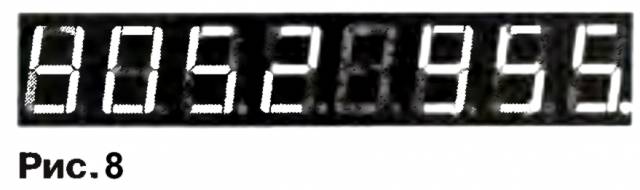
показано, что защита по напряжению включена, а по току - выключена. При выключенной защите установленные значения могут быть любыми.
Переход из режима установки в рабочий режим можно выполнить как перемещением запятой за пределы индикатора, так и нажатием на кнопку SB 3 “Авто” по c ле установки любого разряда. В рабочем режиме выключенная защита индицируется приподнятыми буквами “ U ” и “ I ” , как показано на рис. 9.

После срабатывания защиты устраняют причину, ее вызвавшую. Возвращают устройство в исходное состояние, отключив и включив источник или включив режим “Установка”, а затем нажимая на кнопку SB 3 “Авто”. Необходимо отметить, что устройство реагирует на нажатие кнопок после их отпускания. Если присутствует дребезг контактов, то параллельно кнопкам следует установить конденсаторы емкостью 0,047….0,22 mF . Питать модуль цифрового измерения напряжения и тока желательно от отдельного источника, но это далеко не обязательное условие.

В заключении хочу добавить, что трансформатор желательно брать (делать) мощностью от 300 до 400 Вт., в зависимости от максимальной нагрузки, на которую вы хотите сделать БП.
Данный девай-с был собран и обкатан Romick_Калуга и является 100% рабочим. Кроме этого Romick_Калуга любезно предоставил для всеобщего повторения свои печатные платы тем самым избавив нас от рутинной возни за что ему отдельное СПАСИБО.
Все необходимые материалы ( П\П модуля защиты и индикации (2 варианта), п\п силового блока, прошивки, ит.д.) для повторения данного устройства можно скачать по ссылке в конце статьи

Да чуть не забыл. В случаи если под рукой не нашлось МК PIC 16 F 873 его можно заменить на PIC 16 F 876 без изменения и рисунка печатной платы и используя теже прошивки .
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
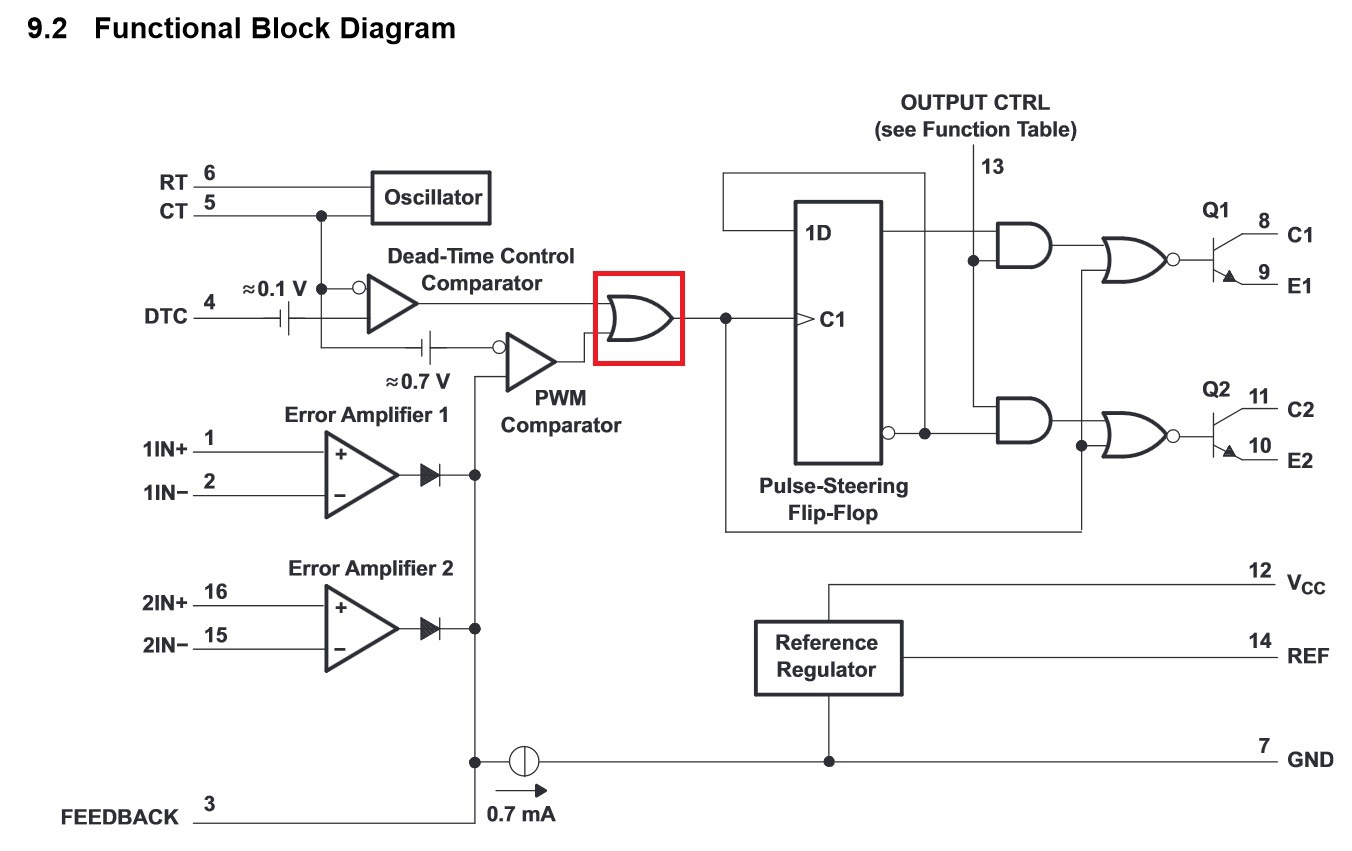
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
От теории к практике
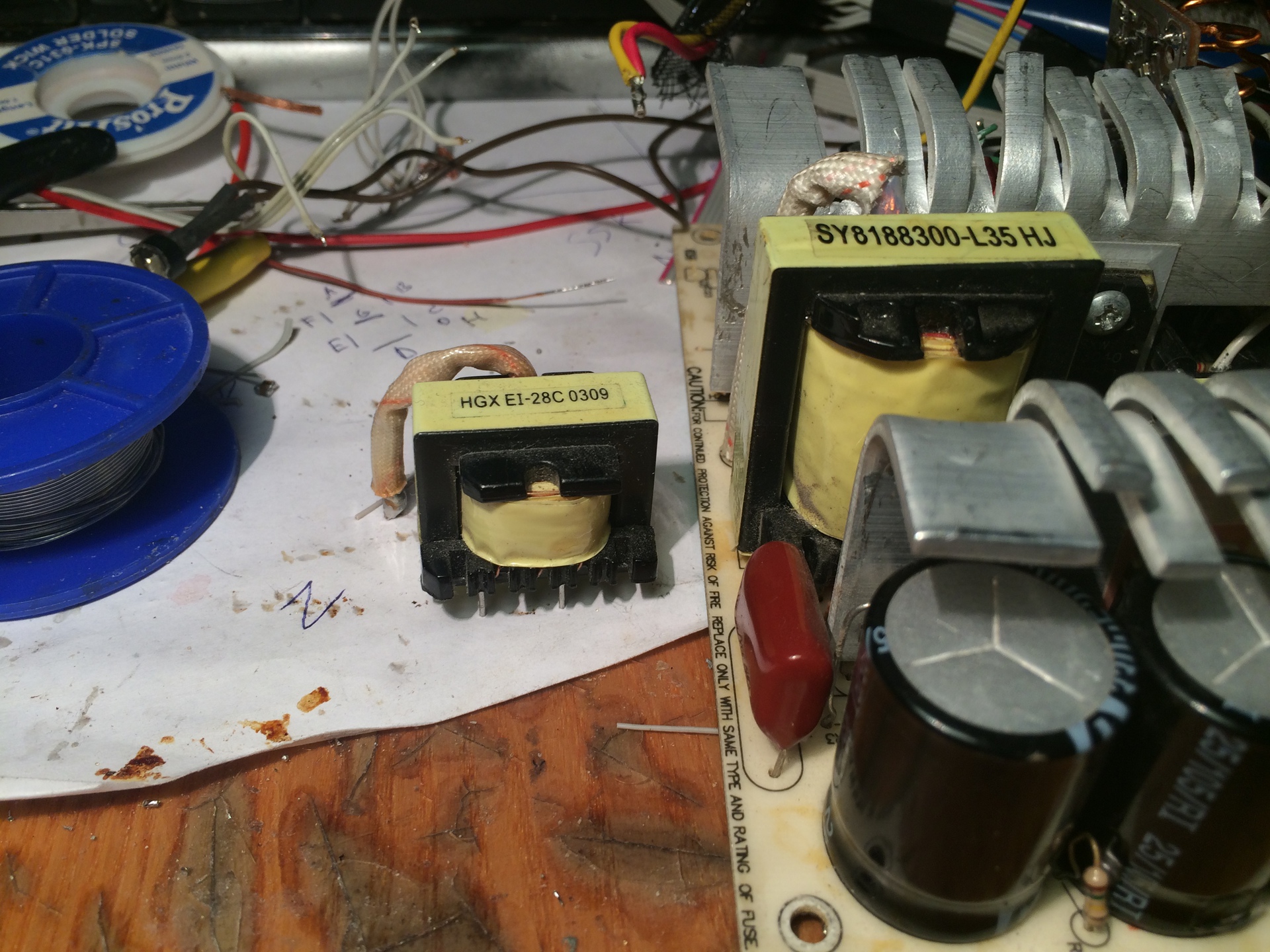
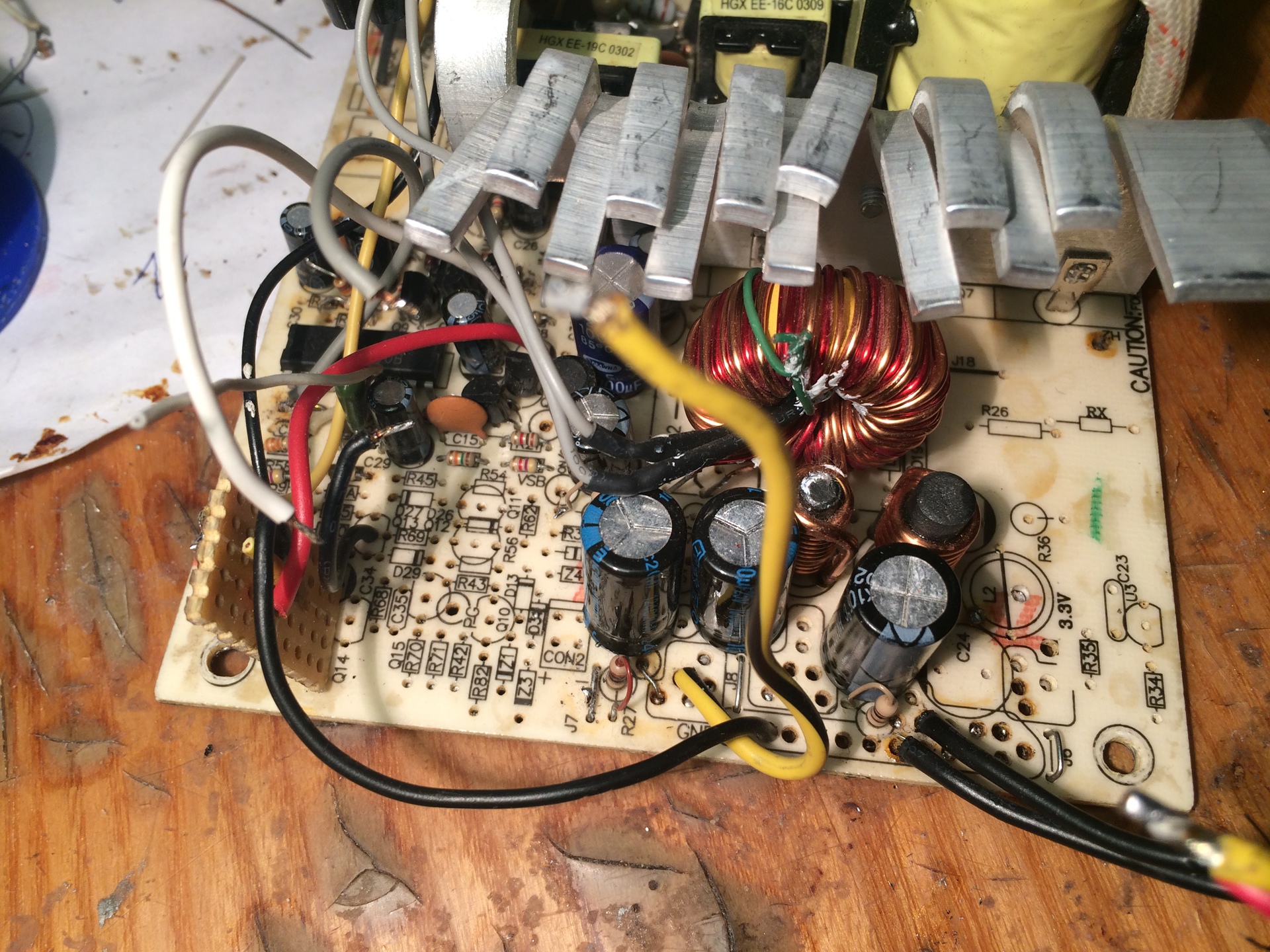
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.

Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
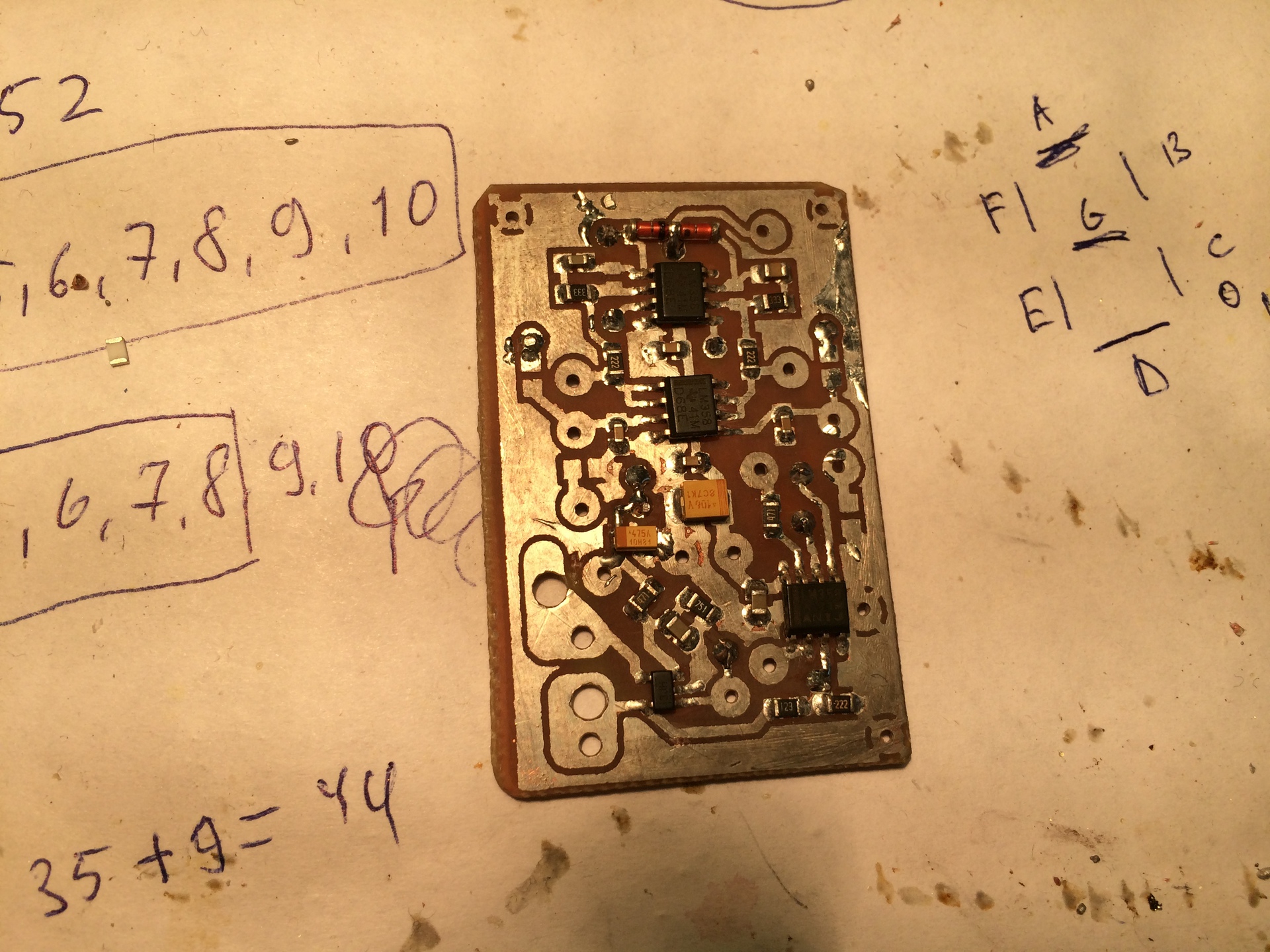
По этой схеме лазерным утюгом была изготовлена плата:
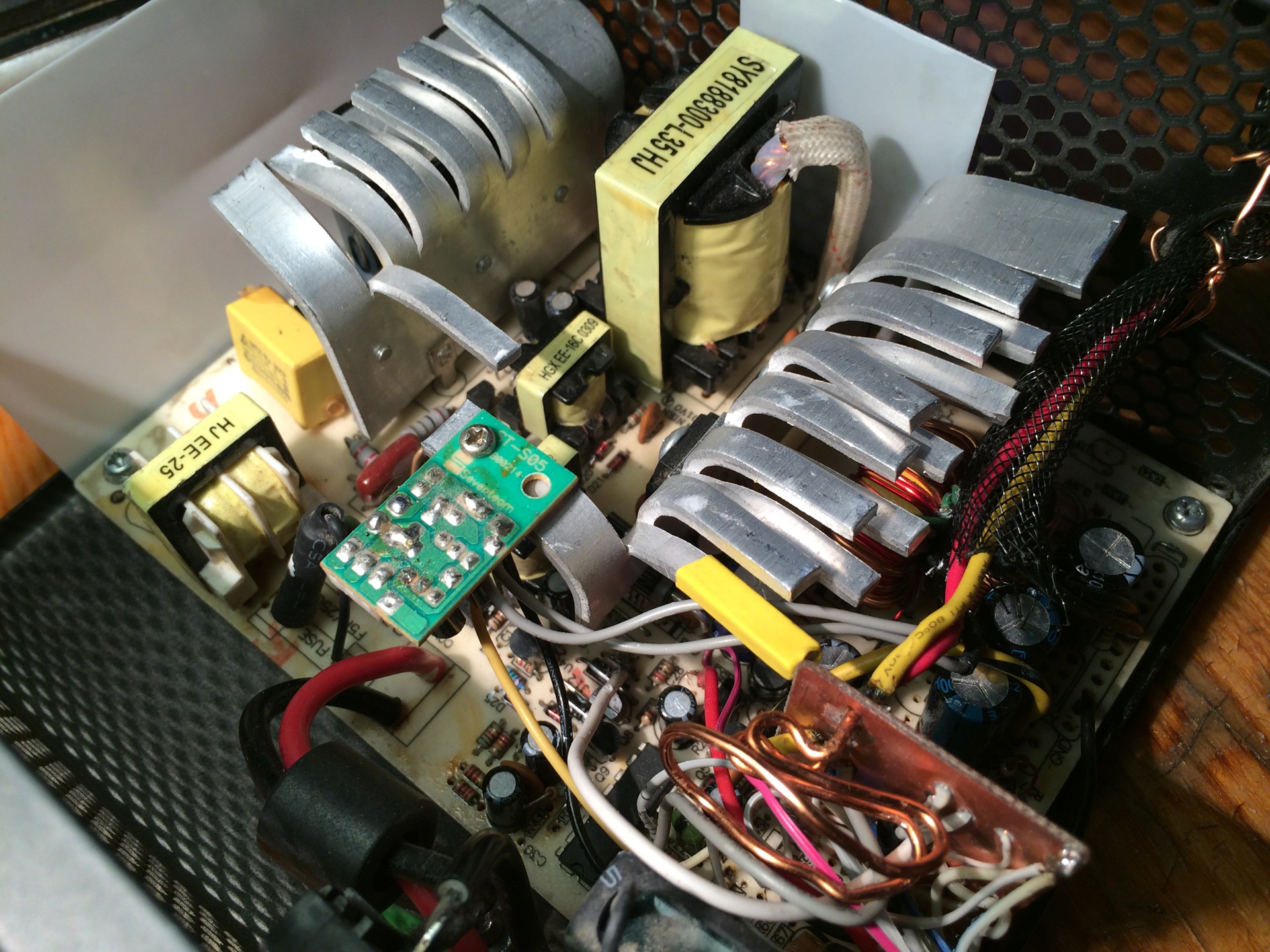
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
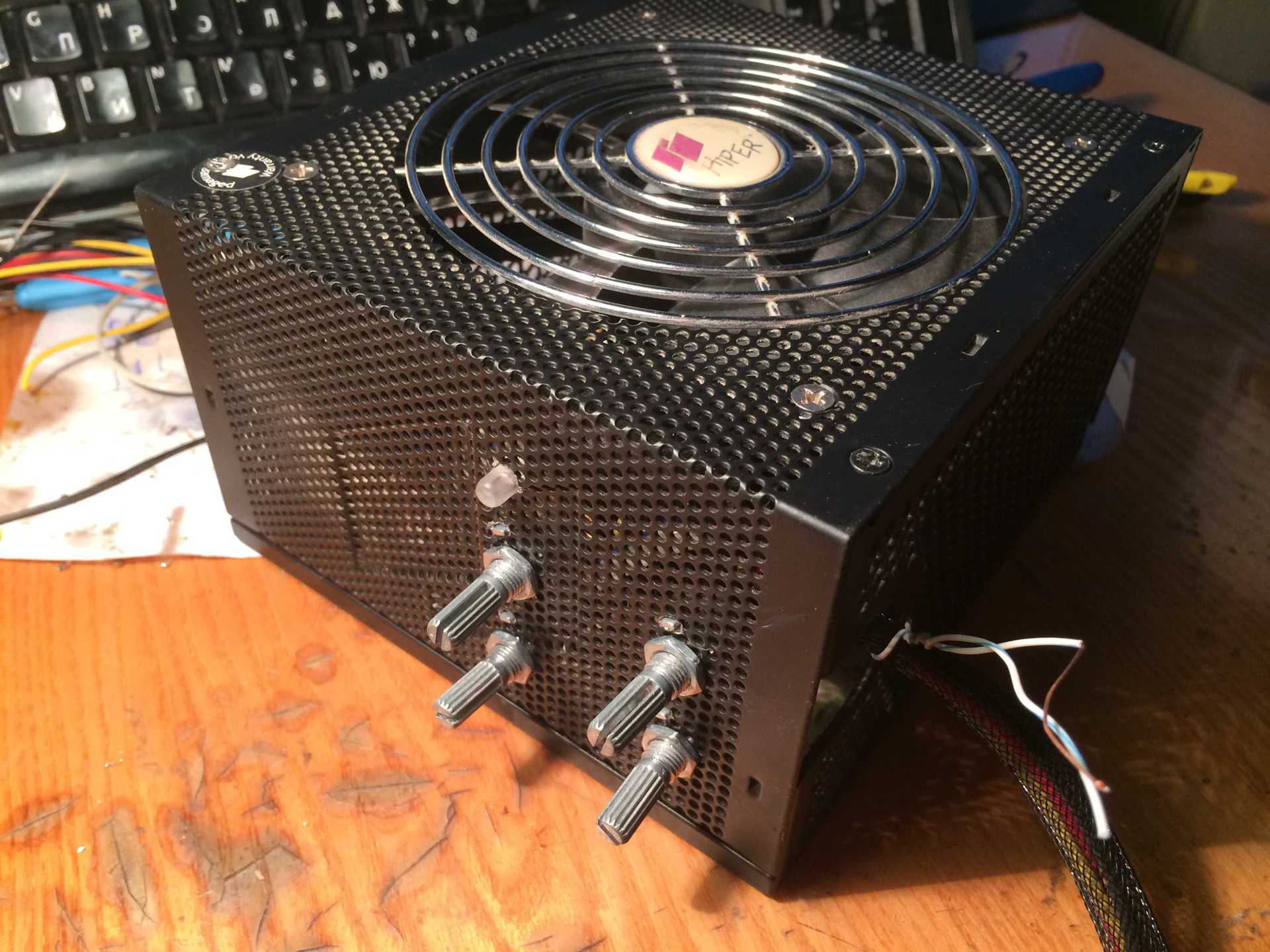
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper'a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
Читайте также: