
Какую систему для отсчета средней точности использует кодовый диск
Основным показателем псевдодальномерных измерений является разность между моментом передачи кодовой посылки (при отсчете времени по часам, установленным на спутнике) и моментом приема упомянутой посылки (при отсчете времени по часам приемника). Применительно к введенному определению под псевдодальностью будем понимать измеряемое значение расстояния между спутником и приемником на момент передачи и приема радиосигналов с применением псевдослучайных кодовых посылок, генерируемых на спутнике и в приемнике. При этом первые из них формируются с помощью спутниковых часов, а вторые — на основе показаний часов приемника.
Показания часов на спутнике и в приемнике, как правило, расходятся, что приводит к возникновению соответствующих погрешностей в величине измеряемого расстояния. Кроме того, дополнительные отличия между определяемым и истинным значениями искомой длины линии обусловлены задержками на трассе прохождения радиосигналов через атмосферу (ионосферу и тропосферу).
С учетом сделанных замечаний основополагающее уравнение для псевдодальномерных измерений имеет вид:
где t np и t c — показания часов приемника и спутника, регистрируемые в момент измерения псевдодальностей; 8t np и 8t c - уход показаний часов относительно эталонного времени на момент взятия отсчетов; с - скорость распространения электромагнитных волн в вакууме; р - топоцентрическое (геометрическое) расстояние между спутником и приемником на момент измерения псевдодальности; 8R = c8t amM - поправка к величине измеряемого расстояния, обусловленная влиянием атмосферы.
Непосредственно на основе уравнения (2.5) может быть получена рабочая формула для псевдодальномерных измерений, аналогичная ранее приведенной формуле (2.2):
Для определения интересующего нас значения геометрического расстояния р измеренную величину R корректируют за счет введения поправок 8t c и 8R (поправка 8t np при этом заранее не определяется, а входит в число неизвестных параметров).
Одна из особенностей определения времени прохождения радиосигналом расстояния между спутником и приемником на базе исполь-
зования кодовых посылок состоит в том, что из-за периодичности повторения отмеченных посылок регистрирующее устройство приемника позволяет определить временное смещение между принимаемыми от спутника и формируемыми на месте кодовыми сигналами только в пределах периода их повторения. Для используемого в системе GPS общедоступного С/А-кода такая периодичность равна одной миллисекунде, что соответствует прохождению радиосигналом расстояния равного около 300 км. Поскольку расстояние до спутника составляет величину около 20 ООО км, то без принятия соответствующих мер может возникнуть проблема разрешения неоднозначности применительно к кодовым сигналам.
При практическом использовании псевдодальномерных измерений с целью определения координат точки стояния приемника абсолютным методом совместно решают следующую систему уравнений:
+ fc, -y„,) 2 + (z e> ^ZJ + AR
К = Vfo 4 ~ x j + (к 4 - Y J + (Z c4 - z j + AR
где R' j 4 = Rj 4 +c$t c - AR — откорректированное значение, псевдодальности до соответствующего спутника; Х с1 с4 , Y c] сФ Z cI с4 — текущие координаты четырех одновременно наблюдаемых спутников; X npJ Y np , Z np - определяемые координаты точки стояния; A R = cbt np — определя-
емая поправка, обусловленная неточностью хода часов приемника. При решении системы уравнений (2.7) производится линеариза-
ция этих уравнений. Точность таких координатных определений оценивается погрешностями на уровне нескольких метров. С учетом этого данный метод находит преимущественное использование при решении навигационных задач.
Применительно к геодезии псевдодальномерный метод определения координат выполняет в большинстве случаев вспомогательные функции. В частности, такой метод весьма часто применяют для определения абсолютных значений координат опорных (референцных) точек.
В тех случаях, когда требуемая точность определения координат оценивается на уровне около одного метра (как, например, на отдельных видах работ в морской геодезии), прибегают к применению дифференциальных псевдодальномерных методов.
Сущность практического использования таких дифференциальных методов состоит в том, что наряду с устанавливаемым на плавсредстве мобильным спутниковым приемником, на берегу (или каком-ли- бо другом неподвижном объекте) в точке с известными координатами устанавливается другой (опорный) приемник, работающий одновременно с первым. Между двумя приемниками организуется канал радиосвязи для передачи информации с опорного приемника на мобильный. Отмеченная информация содержит в своем составе поправки, которые получают на опорном пункте за счет использования как измеряемых значений псевдодальностей, так и расстояний до спутников, вычисляемых на основе применения известных координат этого пункта. Учет упомянутых поправок в мобильном приемнике позволяет минимизировать влияние поправок, входящих в рабочую формулу (2.6).
Последними разработками в области электронной тахеометрии
являются комплексы, в которых электронный тахеометр и спутниковый (GNSS) приемник объединены в одну систему, например SmartStation компании «Leica». SmartStation устанавливается там, где необходимо, GNSS-
приемник определит местоположение и можно начинать геодезические работы.
Рисунок – Система SmartStation
GNSS приемник может определять координаты текущего местоположения станции с использованием RTK технологии с геодезической точностью. Средняя экономия времени по сравнению с раздельным использованием GPS приемников
2.5. Упрощенный анализ фазовых соотношений при спутниковых дальномерных измерениях
При выполнении фазовых измерений несущих колебаний спутниковыми приемниками определяемой величиной является фаза принимаемых от спутника несущих колебаний, которая сравнивается с фазой соответствующих колебаний, генерируемых в приемнике. Из-за высокой частоты несущих колебаний и связанной с ней высокой чувствительностью используемых фазоизмерительных устройств потенциальные возможности этих методов оказываются чрезвычайно высокими и соответствуют миллиметровому уровню точности. В связи с этим фазовые методы являются основными при решении с помощью рассматриваемых спутниковых систем разнообразных геодезических задач, предусматривающих, как правило, обеспечение высокой точности измерений. Вместе с тем при выполнении фазовых измерений возникают специфические для них осложнения (в частности, проблема разрешения неоднозначности), для преодоления которых приходится разрабатывать соответствующие методы.
Рассмотрим в сжатой форме математическое обоснование используемых фазовых методов, характерных для спутниковой системы GPS.
В соответствии с формулой (1.15) представим текущую фазу несущих колебаний, поступающих от спутника на вход приемника, в виде:
vjxtf c — частота несущих колебаний, возбуждаемых в спутниковой аппаратуре, относящаяся к времени выполнения измерений; т — время прохождения несущими колебаниями искомого расстояния между спутником и приемником; 8t c — уход показаний часов на спутнике.
Для текущей фазы возбуждаемых в приемнике опорных несущих
колебаний соответственно имеем:
гдеf - частота возбуждаемых в приемнике несущих колебаний, отнесенная к моменту выполнения измерений; 8t np - уход показаний часов приемника.
Подлежащий определению полный фазовый сдвиг между отмеченными выше колебаниями описывается при этом соотношением:
Ф = Ф с (0 - Ф пр (0 = -/с г + / А - f np 8t np + (/ r - f np )t.
Поскольку при фазовых измерениях удается измерить фазовый сдвиг только в пределах одного периода, то в соответствии с формулой
где N — целое число фазовых циклов, укладывающихся в измеряемом расстоянии; АФ — измеряемое в приемнике значение разности фаз.
В соответствии с проведенными исследованиями [82] уклонение несущих частот^ и f от номинального значения на небольших временных интервалах (с учетом проводимых корректировок) оценивается дробными долями герца. Исходя из этого, можно принять:£ »f np »
« / В результате представляется возможным пренебречь
членом в формуле (2.10) и записать ее в следующем виде:
дф = f T + N + f( st np -St c ).
Величина г представляет собой время запаздывания принимаемого сигнала, а поэтому во многих случаях условно считают это время отрицательной величиной. Если также, как в формуле (2.2), ввести значение скорости света в вакууме с и соответствующую поправку за влияние атмосферы 8t amM , то формула (2.12) может быть представлена как:
АФ = - / | + N + № np -8t c ) + f8t amM ,
р = Я(М - АФ)+с(^ - 8t c ) + cSt amM ,
где k=c/f — длина волны несущих колебаний.
Знак перед АФ зависит от режима работы фазометра и может быть как положительным, так и отрицательным. В отдельных публикациях (например, [82]) в формулу (2.14) вводят еще член, учитывающий влияние случайных ошибок (так называемую «шумовую» компоненту). При характерном для спутниковых измерений методе в
процессе проведения сеанса наблюдений накапливается большой объем измерений. В результате при вычислении средних значений влиянием данной компоненты на завершающей стадии, как правило, пренебрегают.
Из анализа формулы (2.14) следует, что для определения точного значения интересующей нас величины р на сантиметровом (или даже на миллиметровом) уровне точности необходимо не только с высокой точностью определять все входящие в данную формулу поправки, но и располагать надежными методами нахождения неизвестной величины N, соответствующей целому числу длин волн несущих колебаний, укладывающихся в измеряемом расстоянии между спутником и приемником.
Поправка St np , вычисляемая в результате совместного решения системы уравнений (2.7), характеризуется еще более низкой точностью (на уровне около ста наносекунд или в расстоянии — порядка нескольких десятков метров).
Что касается метеопоправки 5t amM , то даже при использовании двухчастотных приемников ее погрешность в линейной мере соответствует нескольким метрам (см. табл. 2.1).
Исходя из наличия таких значительных по величине погрешностей не представляется возможным на основе уравнения (2.14) разработать эффективные методы нахождения величины 7V, а следовательно, и искомого расстояния на основе фазовых методов, так как для надежного разрешения неоднозначности интересующее нас расстояние должно быть определено с погрешностью не хуже 0,5А, что для основной несущей частоты L1 составляет величину около 10 см.
С учетом вышеизложенного были предприняты попытки изыскания способов многократного повышения точности определения перечисленных выше поправок. В результате наиболее эффективными оказались дифференциальные методы, базирующиеся на определении разности снимаемых отсчетов, а не их абсолютных значений. Математический анализ таких методов свидетельствует о возможности резкого повышения точности определения интересующих нас поправок или полного их исключения за счет образования тех или иных разностей.
Современное состояние оптики, механики и электроники позволило создать геодезические приборы - электронные тахеометры и лазерные рулетки, с помощью которых в полевых условиях можно получить информацию об измеряемых горизонтальных и вертикальных углах и расстояниях, автоматически выполнить необходимые вычисления по плановому и высотному положению ситуации При наличии компьютеров процесс может быть автоматизирован, включая получение готовой карты местности. Возможность занесения в запоминающие устройства (ЗУ) допустимых погрешностей измерений (например, циклической погрешности дальномера, коллимационной погрешности, отклонений места нуля, отклонений оси вращения от отвесной линии за счет введения двух-координатных электронных уровней и др.) позволяет повысить точность и производительность измерений.
Встроенное программное обеспечение позволяет выполнить следующие геодезические задачи: обратную засечку, уравнивание теодолитного хода, измерение высот недоступных объектов, вынос в натуру координат точек и линий, вычисление площадей, разбивку кривых и т.д.
На российском рынке тахеометры представляют сегодня такие известные фирмы, как: Leica (Швейцария), Sokkia, Topcon, Nikon и Pentax (Япония), Trimble Navigation (США), Opton (Германия), АГА (Швеция), а также ФГУП "УОМЗ" (Россия, г. Екатеринбург) и др.
УОМЗ выпустил тахеометры 2Та5 со встроенной памятью на 5000 точек и ЗТа5Р, который может работать совместно с программным комплексом "CREDO", обеспечивая безбумажную технологию; тахеометр ЗТаЗР, в отличие от своих предшественников, имеет компенсатор при вертикальном круге и электронный уровень. Тахеометр ЗТаЗРМ имеет два дисплея и лазерный центрир.
Принципы измерения расстояний практически не отличаются от работы светодальномеров; при измерении углов используют кодовые и инкрементальные (накопительные) преобразователи.
В тахеометрах типа Та5 и ТаЗМ используются преобразователи накопительного типа. Здесь рабочей мерой служит нанесенный на стеклянную подложку растровый диск с радиальными штрихами (рис. 1). На стеклянной подложке нанесены две штриховые дорожки с равными угловыми интервалами прозрачной и непрозрачной частей, штрихи одной дорожки сдвинуты относительно другой на четверть периода Т, благодаря чему определяется направление перемещения алидады (реверс). Средний диаметр диска равен 85 мм, количество штрихов растра N = 10 000. Прибор не имеет "абсолютного нуля", нулевое направление задается в момент включения прибора, после выключения прибора его ориентация в горизонтальной плоскости в памяти не сохраняется.
Угловое перемещение прибора преобразуется в амплитуду, фазу, время или частоту электрического сигнала, затем электрическими схемами - в цифровой код. В преобразователях накопительного типа вычисляется целое число периодов растра и оценивается его дробная часть, заключенная между двумя направлениями угла. При этом целое число периодов вычисляется в канале грубого отсчета, дробная часть - в канале точного отсчета.
Рис. 2. Принципиальная схема считывания информации с растрового преобразователя тахеометра ТаЗМ:1 - светодиод; 2 - конденсор; 3 - призма БР-180"; 4 - растровый диск; 5 - призма АР-90"; 6 микрообъективы; 7 - пентапризма; 8 диафрагма; 9 - приемник излучения
Рассмотрим оптическую схему преобразователя ТаЗМ (рис. 2). Свет от светодиода 1 через конденсор 2 и призму 3 освещает штрихи растрового диска 4; изображение штрихов с помощью оптического мостика (призма 5, микрообъективы 6 и пентапризма 7) передается на противоположную сторону растрового диска и через диафрагму 8 считывается приемниками излучения (ПИ) 9. Увеличение оптического мостика <> = 1,0101, поэтому изображение, полученное на противоположной стороне растрового диска, шире штрихов примерно на 1/100. Такое сопряжение называют нониусным.
Период растра для тахеометра ТаЗМ
Т, =360°/10000 =2 ´ 09,6"
соответственно угловой период изображения Т2 = 2'10,9".При вращении алидады растр и его изображение, образующие муаровую картину, перемещаются навстречу друг другу, что приводит к увеличению разрешающей способности канала грубого отсчета в два раза, тогда:Т = t1/ 2=1' 04,8".Угловой размер между комбинационными (муаровыми) полосами 1º48´0,64, благодаря чему можно использовать приемник излучения с размером чувствительной площадки порядка одного миллиметра. W и W2 ~ угловые периоды растра, нанесенного на диске, и его изображения на противоположной стороне соответственно. В тахеометре ТаЗМ используется четырехплощадочный фотодиод ФД20КП (см. рис. 2, поз. 9), размер окна щелевой диафрагмы 8 при этом равен 0,9 мм.
Оптическая схема при вертикальном круге аналогична показанной на рис. 2, однако оптический мостик (элементы 5, 6, 7) расположен на маятниковом подвесе и является одновременно компенсатором наклонов прибора. Вибрации компенсатора гасятся с помощью магнитоиндукционного демпфера.На рис. 3 приведена структурная схема узла считывания информации Пространственный сдвиг окон диафрагмы 8 (см. рис. 4) позволяет на выходе чувствительных площадок приемника излучения иметь токи вида:
I1 = Iosin φ , I2 = Iocos φ , I3 = -I0sin φ , I4 = -i0 cos φ где i0 - амплитуда сигнала.
Противофазные сигналы поступают на входы операционных усилителей А1 и А2, в результате их попарного сложения
Рис. 3.Принципиальная схема первичного преобразователя кодового датчика угла
на выходе усилителей амплитуда сигналов удваивается, в точках А и В имеют напряжения соответственно (рис. 4
Кроме того, попарное сложение (балансная схема) сигналов позволяет устранить паразитное влияние фоновой засветки, старения элементов электрической схемы и нестабильность излучения источника.
Юстировка преобразователя угловых перемещений заключается в настройке квадратурных сигналов sin и cos после их предварительного усиления в точках А и В (см. рис. 3). Для этого один из сигналов подают на вход X, а другой на вход Y двухлучевого осциллографа. При перемещении алидады тахеометра на экране осциллографа будет смещаться точка. При правильных сдвигах фаз между сигналами (90°) и равных их амплитудах траектория смещения (фигура Лиссажу) будет иметь вид окружности диаметром порядка U = 2,5 вольт (рис. 5,а).
При разных амплитудах сигналов и сдвиге фаз между ними 90° (см. рис. 4) окружность вырождается в эллипс, оси которого совпадают с осями координат осциллографа. При сдвиге фаз, отличном от 90°, фигура Лиссажу наклоняется на соответствующий сдвигу фаз угол (см. рис. 5,б). Дальнейшая настройка преобразователя заключается в юстировке положения призм и микрообъективов оптического мостика (поз. 5, 6, 7 на рис. 2). Окончательная настройка амплитуд квадратурных сигналов может быть осуществлена переменными резисторами промежуточных усилительных каскадов. При электронном методе считывания как таковое понятие рена отсутствует, при этом на погрешность измерения оказывают влияние эксцентриситеты лимба и алидады. Их выявляют по изменению коллимационной погрешности на разных участках горизонтального круга.
Для этого зрительная труба электронного тахеометра фокусируется на бесконечность, тахеометр устанавливается на
прецизионный поворотный столик, напротив располагается (труба в трубу) коллиматор. Совмещая сетки нитей коллиматора и тахеометра, при двух положениях зрительной трубы тахеометра (Л и П) вычисляют коллимационную погрешность. Повернув столик с тахеометром на 15°, снова совмещают его сетку нитей с сеткой нитей коллиматора и вычисляют коллимационную погрешность. Измерения выполняют в пределах полного оборота электронного тахеометра через 15°. Кроме того, наличие эксцентриситетов может быть выявлено по изменениям углового положения фигуры Лиссажу на экране осциллографа.При перемещении алидады происходит подсчет целых периодов в канале грубого отсчета (ГО), точный отсчет выполняется при неподвижной алидаде.
В канале точного отсчета сигналы интерполируются, получая 128 счетных импульсов на период Т, следовательно один отсчетный индекс канала точного отсчета соответствует 0,5 угловым секундам.
Используемая в тахеометре ТаЗМ оптическая схема имеет ряд существенных недостатков:
1) отсутствует нуль-метка инициализации кругов, обнуление счетчика происходит при включении прибора,
2) превышение скорости вращения алидады приводит к сбоям в работе, которые можно выявить только при повторной ориентации прибора на опорное направление,
3) жесткие требования к юстировке оптического мостика, разъюстировка оптического мостика приводит к изменению ширины муаровой полосы и, как следствие, изменению амплитуд и сдвигу фаз, отличному от 90°, измерительных сигналов Uвых1 и Uвых2,
4) разъюстировка преобразователя перемещений приводит к накапливающейся погрешности измерений, которую выявляют по многократному замыканию горизонта при визировании на одну и ту же марку.
Указанные выше недостатки частично устранены в тахеометрах 2Та5, ЗТа5 и 4Та5. В части измерения расстояний в указанных выше тахеометрах использован фазовый метод с измерением временного интервала аналогичный светодально-меру СТ5. В угловых же преобразователях используют схему с двумя сопряженными растрами (в 2Та5 - с односторонним считыванием, в ЗТа5 - с двусторонним считыванием). Схема преобразователя угла приведена на рис. 6
Индикаторные растры имеют структуру, аналогичную измерительному растру, но окна для получения квадратурных сигналов sin и cos пространственно сдвинуты на л/2. Зазоры между измерительным и индикаторными растрами должны быть соизмеримы с периодом растра. На лимбе нанесена специальная нуль-метка, которая инициализируется при включении прибора и может служить началом отсчета.
В настоящее время наибольшей популярностью у геодезистов пользуются электронные тахеометры, в которых при измерении углов в качестве рабочей меры используют кодовые шкалы, а считывание информации с них осуществляется с помощью ccd-сенсоров.
Одним из первых таких тахеометров был электронный тахеометр НР-3820А фирмы "Хьюлетт Паккард" (США). На рис 7 приведена принципиальная схема его углового преобразователя [1, 81].
Рис. 7.Принципиальная схема углового преобразователя тахеометра НР-3820 (США): 1,4- диаметрально расположенные считывающие системы точного отсчета(для устранения влияния эксцентриситета);2 - считывающая система промежуточного (средней точности) отсчета; 3 - считывающая система грубого отсчета
На рис. 126 показан измерительный кодовый диск.
Синусоидальная дорожка имеет 128 периодов длиной по 1080 мкм, в пределах периода установлены четыре ПИ
Рис. 9. Принципиальная схема расположения приемников излучения: а - форма синусоидальной дорожки; б - форма сигнала на выходе ПИ
интервалом, равным периода синусоидальной маски. На выходе ПИ возникают фототоки в соответствии с выражениями:
При попарном включении ПИ (1 + 3 и 2 + 4) на выходе операционных усилителей получаются два сигнала с удвоенной амплитудой, сдвинутые относительно друг друга на 90°:
позволяющие обеспечить реверс и интерполяцию сигналов с дискретностью периода синусоид маски (21´36").
Рис 10 Структура кодовой дорожки двоичного преобразователя
На рис.10,а показаны линейная развертка кодовой шкалы и расположение над ней чувствительных элементов (приемников излучения), схема имеет существенный недостаток: на границах светлых и темных участков шкалы возникает погрешность из-за неоднозначности считывания, достигающая единицы старшего двоичного разряда. Для устранения неоднозначности используется метод с двумя чувствительными элементами на разряд (кроме младшего), схема приведена на рис. 10,6. Здесь: если с чувствительного элемента младшего разряда считывается код "О", то сигналы для других разрядов считываются с левой колонки, если с младшего разряда считывается "1", то сигналы для других разрядов считываются с правой колонки чувствительных элементов. Метод известен как "метод двойной щетки". Кроме него существуют методы с V-образным расположением чувствительных элементов, а также двоично-сдвинутые кодовые шкалы. Кодовый растровый диск использован, например, в отечественном электронном тахеометре ТС600Е.
В современных электронных тахеометрах при вертикальном круге используются компенсаторы, работающие по принципу электронного уровня: ампула частично заполнена электролизной жидкостью, с противоположных сторон расположены контакты. При отвесном положении оси прибора сопротивления между контактами, расположенными на противоположных сторонах ампулы равны, при наклоне прибора электролизная жидкость с разных сторон перекрывает разные участки между контактами, соответственно изменяя сопротивление между ними. Информация о разных сопротивлениях учитывается микропроцессором в виде поправки за угол наклона прибора. Диапазон работы таких компенсаторов не превышает 3 минут.
тей 19 и окуляра 20.
На рис. 16 в общем виде показана принципиальная схема углового преобразователя накопительного типа, на рис. 17 -принципиальная схема углового кодового преобразователя.
Теодолиты в течение веков прошли длительную эволюцию. От первых, массивных, полностью металлических теодолитов, ещё не имевших вертикального круга (рисунок 1), до современных высокотехнологичных и эргономичных, из легких стойких сплавов и полимеров. Их совершенствование и поиск новых конструктивных решений продолжаются и в настоящее время.

Рисунок 1 –Теодолит малый
Происхождение слова «теодолит», связано с греческими понятиями «theasthai» (смотреть) и «elitteo» (вращать) которые в полной мере отражают функциональную сущность прибора. Или по другой версии, происходит от французских понятий «рассматриваю + длинный». Термин теодолит, определяется как – геодезический прибор, предназначенный для измерения горизонтальных и вертикальных углов. По классификации средств измерений, теодолиты относятся к угломерным приборам. Конструктивно, теодолит состоит из вращающегося на вертикальной оси горизонтального круга с алидадой и скреплённых с нею колонок, на которые опирается горизонтальная ось, несущая зрительную трубу, вертикальный круг и бортовой компютер.
По принятой классификации теодолитов по точности измерений, их можно разделить на четыре группы: высокоточные, повышенной точности, средней точности и технические. Рассматриваемый в данных методических указаниях прибор относится к среднему классу.
Высокоточные теодолиты обеспечивают точность измерения горизонтальных углов из одного приёма не ниже 1".
Теодолиты повышенной точности обеспечивают точность измерения горизонтального угла из одного приёма со средней квадратической ошибкой от 1.5" до 3".
Теодолиты средней точности обеспечивают точность измерения горизонтального угла из одного приёма со средней квадратической ошибкой от 3" до 20".
Теодолиты технической точности обеспечивают точность измерения горизонтального угла одним приёмом со средней квадратической ошибкой от 20′′ до 1'.
Для того, чтобы выполнить измерение горизонтального и вертикального угла на местности в конструкции теодолита содержатся:
1. Горизонтальный и вертикальный круги со шкалами и отсчётными устройствами для снятия отсчётов по ним;
2. Устройство для наведения на пункт (точку) наблюдения (визирное устройство);
3. Системы для поворота визирного устройства в двух плоскостях;
4. Приспособления для ориентирования круговых шкал (лимбов) в заданных плоскостях измерений (горизонтальной и вертикальной);
5. Приспособления для установки прибора над заданной точкой, с которой производится наблюдение.
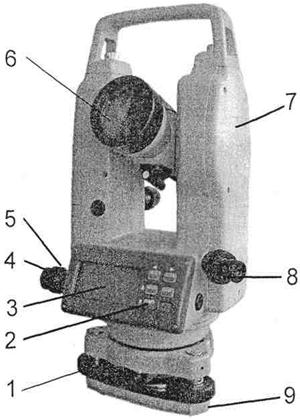
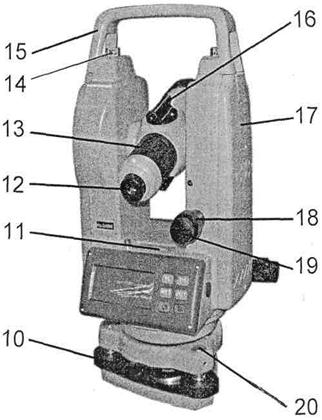
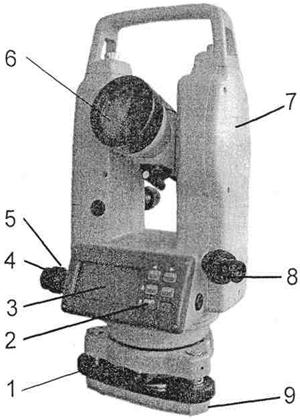
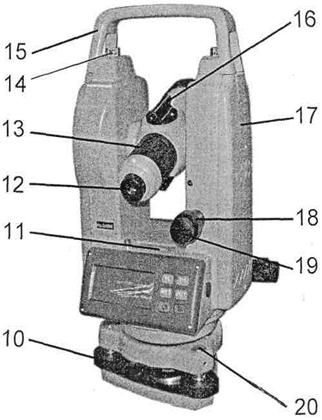
Средние электронные теодолиты, также как и оптические, применяются для измерения горизонтальных и вертикальных углов, расстояний нитяным дальномером при производстве различного рода топографических и разбивочно-привязочных работ.На рисунке 2 представлен электронный теодолит VEGA TEO 5 китайского производства.

Рисунок 2 – Электронный теодолит VEGA TEO 5
В конструкции электронного теодолита имеется цифровой преобразователь угла в цифровой код. Цифровой преобразователь угла состоит из двух элементов: кодирующего диска, индексной диафрагмы и фотоэлектрической считывающей системы. В основу кода заложена двоичная система. На соосно расположенных дисках (лимбе и алидаде), на обращённых друг к другу поверхностях, нанесены кодирующий диск и индексная диафрагма. Они представляют собой концентрические кодовые дорожки с прозрачными и непрозрачными сегментами. Соответственно, отсчёт по кодовому лимбу представляется сочетанием двух сигналов «темно – светло». Двоичный сигнал преобразуется в цифровой код и выводится на дисплей.
2 УСТРОЙСТВО ЭЛЕКТРОННОГО ТЕОДОЛИТА VEGA TEO 5
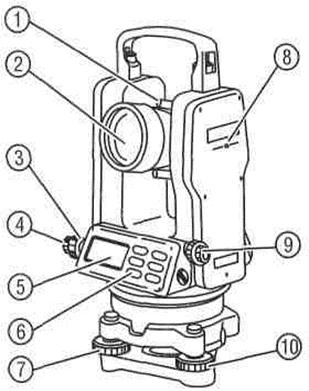
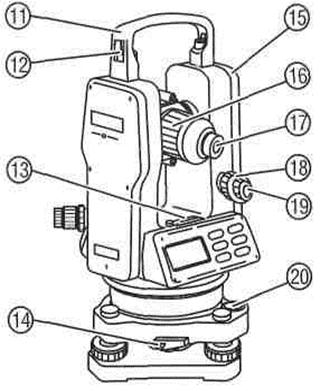
Данный прибор обеспечивает точность измерения горизонтальных углов одним приемом со средней квадратической ошибкой 5′′. Устройство теодолита VEGA TEO 5 представлено на рисунке 3.Техническая характеристика теодолита VEGA TEO 5 представлена в таблице 1.
 |  |
| а | б |
Рисунок 3 – Устройство электронного теодолита VEGA TEO 5
а – вид теодолита со стороны оптического центрира; б – вид теодолита со стороны закрепительного винт трубы и вертикального круга; 1 – подъёмные винты; 2 – функциональные клавиши; 3 – дисплей; 4 – наводящий винт горизонтального круга; 5 – закрепительный винт горизонтального круга; 6 – объектив зрительной трубы; 7 – метка высоты инструмента; 8 – оптический центрир; 9 – основание; 10 – закрепительный винт подставки; 11 – цилиндрический уровень; 12 – кольцо окуляра зрительной трубы диоптрийное; 13 – кремальера (фокусирующее кольцо); 14 – винт ручки теодолита; 15 – ручка теодолита; 16 – коллиматорный визир; 17 – отделение для батарей; 18 – закрепительный винт трубы и вертикального круга; 19 – наводящий винт трубы и вертикального круга; 20 – круглый уровень

Таблица 1 – Техническая характеристика электронного теодолита VEGA TEO 5
| Элемент теодолита | Параметр | Величина |
| Зрительная труба | Длина | 155 мм |
| Диаметр входного зрачка, не менее | 45 мм | |
| Увеличение, не менее | 30 × | |
| Изображение | прямое | |
| Угловое поле зрения | 1˚30' | |
| Предел разрешения, не более | 2.5" | |
| Наименьшее расстояние визирования, не более | 1.3 м | |
| Коэффициент нитяного дальномера | 100 ± 0.5 | |
| Постоянная нитяного дальномера, не более | ± 0.05 | |
| Система измерения углов | Диапазон измерения углов | 0 … 360˚ |
| Система отсчёта углов | относительная | |
| Дискретность отсчитывания измерения углов | 1"/5" | |
| Допускаемое СКО измерения углов, не более | 5" | |
| Диаметр вертикального круга | 78 мм | |
| Трегер | съёмный | да |
| Оптический центрир | Изображение | прямое |
| Увеличение | 4 × | |
| Поле зрения | 5˚ | |
| Фокус | 0.5 ~ бесконечность | |
| Точность | ± 0.5 мм | |
| Источник электро-питания | Щелочная батарея | 4 батарейки, тип АА |
| Аккумулятор | 6 В/1500 мАч | |
| Продолжительность непрерывной работы, не менее | батарейки: 6 ч; аккумулятор: 15 ч | |
| Подсветка | ЖК дисплей | да |
| Сетка нитей | да | |
| Уровни | Цена деления установочного круглого уровня | 8 ± 1.2'/2 мм |
| Цена деления цилиндрического уровня | 30 ± 4.5"/2 мм | |
| Другое | Диапазон рабочих температур | от -20° до +50°С |
| Масса, не более | 4.4 кг | |
| Габаритные размеры, Д×Ш×В | 145×200×320 мм |
Электронный теодолит VEGA TEO 5 состоит из горизонтального круга, вертикального круга, зрительной трубы, подставки и электронной части. Подставка у теодолита съёмная. Горизонтальный и вертикальный круги, как и у оптических теодолитов, выполнены из стекла. Горизонтальный и вертикальный круги градуированы от 0 до 360˚.
Назначение частей теодолита VEGA TEO 5 такое же, как и у теодолитов 3Т5КП и ТЭ5.
Благодаря высокому уровню международной стандартизации и унификации в конструкции приборов различных производителей, в технических характеристиках приборов аналогичной точности, в принципе их работы очень мало отличий. Поэтому пользователям нет необходимости переучиваться для выполнения измерений теодолитом другой фирмы.
Теодолиты в течение веков прошли длительную эволюцию (приложение А). От первых, массивных, полностью металлических теодолитов, ещё не имевших вертикального круга (рисунок 1), до современных высокотехнологичных и эргономичных, из легких стойких сплавов и полимеров. Их совершенствование и поиск новых конструктивных решений продолжаются и в настоящее время.

Рисунок 1 –Теодолит малый
Происхождение слова «теодолит», связано с греческими понятиями «theasthai» (смотреть) и «elitteo» (вращать) которые в полной мере отражают функциональную сущность прибора. Или по другой версии, происходит от французских понятий «рассматриваю + длинный». Термин теодолит, определяется как - геодезический прибор, предназначенный для измерения горизонтальных и вертикальных углов. По классификации средств измерений, теодолиты относятся к угломерным приборам. Конструктивно, теодолит состоит из вращающегося на вертикальной оси горизонтального круга с алидадой и скреплённых с нею колонок, на которые опирается горизонтальная ось, несущая зрительную трубу и вертикальный круг.
По принятой классификации теодолитов по точности измерений, их можно разделить на четыре группы: высокоточные, повышенной точности, средней точности и технические. Рассматриваемые в данных методических указаниях приборы относятся к низшему классу.
Высокоточные теодолиты обеспечивают точность измерения горизонтальных углов из одного приёма не ниже 1".
Теодолиты повышенной точности обеспечивают точность измерения горизонтального угла из одного приёма со средней квадратической ошибкой от 1.5" до 3".
Теодолиты средней точности обеспечивают точность измерения горизонтального угла из одного приёма со средней квадратической ошибкой от 3" до 20".
Теодолиты технической точности обеспечивают точность измерения горизонтального угла одним приёмом со средней квадратической ошибкой от 20′′ до 1'.
Для того, чтобы выполнить измерение горизонтального и вертикального угла на местности в конструкции теодолита содержатся:
1. Горизонтальный и вертикальный круги со шкалами и отсчётными устройствами для снятия отсчётов по ним;
2. Устройство для наведения на пункт (точку) наблюдения (визирное устройство);
3. Системы для поворота визирного устройства в двух плоскостях;
4. Приспособления для ориентирования круговых шкал (лимбов) в заданных плоскостях измерений (горизонтальной и вертикальной);
5. Приспособления для установки прибора над заданной точкой, с которой производится наблюдение.
Технические электронные теодолиты, также как и оптические, применяются для измерения горизонтальных и вертикальных углов, расстояний нитяным дальномером при производстве различного рода топографических и разбивочно-привязочных работ.На рисунке 2 представлен электронный теодолит VEGA TEO 20 китайского производства.

Рисунок 2 – Электронный теодолит VEGA TEO 20
В конструкции электронного теодолита имеется цифровой преобразователь угла в цифровой код. Цифровой преобразователь угла состоит из двух элементов: кодирующего диска, индексной диафрагмы и фотоэлектрической считывающей системы. В основу кода заложена двоичная система. На соосно расположенных дисках (лимбе и алидаде), на обращённых друг к другу поверхностях, нанесены кодирующий диск и индексная диафрагма. Они представляют собой концентрические кодовые дорожки с прозрачными и непрозрачными сегментами. Соответственно, отсчёт по кодовому лимбу представляется сочетанием двух сигналов «темно - светло». Двоичный сигнал преобразуется в цифровой код и выводится на дисплей.
На рисунке 3 представлен электронный теодолит CST/berger 56-BDT30.

Рисунок 3 – Электронный теодолит CST/berger 56-BDT30
2 УСТРОЙСТВО ЭЛЕКТРОННОГО ТЕОДОЛИТА VEGA TEO 20
Данный прибор обеспечивает точность измерения горизонтальных углов одним приемом со средней квадратической ошибкой 20′′. Устройство теодолита VEGA TEO 20 представлено на рисунке 4.Техническая характеристика теодолита VEGA TEO 20 представлена в таблице 1.
 |  |
| а | б |
а - вид теодолита со стороны оптического центрира; б - вид теодолита со стороны закрепительного винт трубы и вертикального круга; 1 – подъёмные винты; 2 – функциональные клавиши; 3 – дисплей; 4 – наводящий винт горизонтального круга; 5 – закрепительный винт горизонтального круга; 6 – объектив зрительной трубы; 7 – метка высоты инструмента; 8 – оптический центрир; 9 – основание; 10 – закрепительный винт подставки; 11 – цилиндрический уровень; 12 – кольцо окуляра зрительной трубы диоптрийное; 13 – кремальера (фокусирующее кольцо); 14 – винт ручки теодолита; 15 – ручка теодолита; 16 – коллиматорный визир; 17 – отделение для батарей; 18 - закрепительный винт трубы и вертикального круга; 19 - наводящий винт трубы и вертикального круга; 20 – круглый уровень
Рисунок 4 - Устройство электронного теодолита VEGA TEO 20
Электронный теодолит VEGA TEO 20 состоит из горизонтального круга, вертикального круга, зрительной трубы и подставки. Подставка у теодолита съёмная. Горизонтальный и вертикальный круги, как и у оптических теодолитов, выполнены из стекла. Горизонтальный и вертикальный круги градуированы от 0 до 360˚.
Таблица 1 - Техническая характеристика электронного теодолита VEGA TEO 20
| Элемент теодолита | Параметр | Величина |
| Зрительная труба | Длина | 155 мм |
| Диаметр входного зрачка, не менее | 45 мм | |
| Увеличение, не менее | 30 × | |
| Изображение | прямое | |
| Угловое поле зрения | 1˚30' | |
| Предел разрешения, не более | 2.5" | |
| Наименьшее расстояние визирования, не более | 1.3 м | |
| Коэффициент нитяного дальномера | 100 ± 0.5 | |
| Постоянная нитяного дальномера, не более | ± 0.05 | |
| Система измерения углов | Диапазон измерения углов | 0 … 360˚ |
| Система отсчёта углов | относительная | |
| Дискретность отсчитывания измерения углов | 5"/10" | |
| Допускаемое СКО измерения углов, не более | 20" | |
| Диаметр вертикального круга | 78 мм | |
| Трегер | съёмный | да |
| Оптический центрир | Изображение | прямое |
| Увеличение | 4 × | |
| Поле зрения | 5˚ | |
| Фокус | 0.5 ~ бесконечность | |
| Точность | ± 0.5 мм | |
| Источник электро-питания | Щелочная батарея | 4 батарейки, тип АА |
| Аккумулятор | 6 В/1500 мАч | |
| Продолжительность непрерывной работы, не менее | батарейки: 6 ч; аккумулятор: 15 ч | |
| Подсветка | ЖК дисплей | да |
| Сетка нитей | да | |
| Уровни | Цена деления установочного круглого уровня | 8 ± 1.2'/2 мм |
| Цена деления цилиндрического уровня | 30 ± 4.5"/2 мм | |
| Другое | Диапазон рабочих температур | от -20° до +50°С |
| Масса, не более | 4.4 кг | |
| Габаритные размеры, Д×Ш×В | 145×200×320 мм |
3 УСТРОЙСТВО ЭЛЕКТРОННОГО ТЕОДОЛИТА
CST/berger 56-BDT30
Данный прибор обеспечивает точность измерения горизонтальных углов одним приемом со средней квадратической ошибкой 30′′. Устройство электронного теодолита CST/berger 56-BDT30 представлено на рисунке 5.Техническая характеристика теодолита CST/berger 56-BDT30 представлена в таблице 2.
 |  |
| а | б |
а - вид теодолита со стороны оптического центрира; б - вид теодолита со стороны закрепительного винт трубы и вертикального круга; 1 – коллиматорный визир; 2 – объектив зрительной трубы; 3 – закрепительный винт горизонтального круга; 4 – наводящий винт горизонтального круга; 5 – дисплей; 6 – функциональные клавиши; 7 – подъёмные винты; 8 – метка высоты инструмента; 9 – оптический центрир; 10 – основание; 11 – ручка теодолита; 12 – винт ручки теодолита; 13 – цилиндрический уровень; 14 – закрепительный винт подставки; 15 – отделение для батарей; 16 – кремальера (фокусирующее кольцо); 17 – кольцо окуляра зрительной трубы диоптрийное; 18 - закрепительный винт трубы и вертикального круга; 19 - наводящий винт трубы и вертикального круга
Рисунок 5 - Устройство теодолита CST/berger 56-BDT30
Таблица 2 - Техническая характеристика электронного теодолита CST/berger 56-BDT30
| Элемент теодолита | Параметр | Величина |
| Зрительная труба | Длина | 155 мм |
| Диаметр входного зрачка, не менее | 45 мм | |
| Увеличение, не менее | 30 × | |
| Изображение | прямое | |
| Угловое поле зрения | 1˚30' | |
| Предел разрешения, не более | 2.5" | |
| Наименьшее расстояние визирования, не более | 1.3 м | |
| Коэффициент нитяного дальномера | 100 ± 1 | |
| Постоянная нитяного дальномера, не более | ||
| Система измерения углов | Диапазон измерения углов | 0 … 360˚ |
| Система отсчёта углов | относительная | |
| Дискретность отсчитывания измерения углов | 5"/10" | |
| Допускаемое СКО измерения углов, не более | 30" | |
| Диаметр вертикального круга | 82 мм | |
| Трегер | съёмный | да |
| Оптический центрир | Изображение | прямое |
| Увеличение | 4 × | |
| Поле зрения | 5˚ | |
| Фокус | 0.5 ~ бесконечность | |
| Точность | ± 1 мм | |
| Источник электро-питания | Щелочная батарея | 4 батарейки, тип АА |
| Аккумулятор | 6 В/1500 мАч | |
| Продолжительность непрерывной работы, не менее | батарейки: 6 ч; аккумулятор: 15 ч | |
| Подсветка | ЖК дисплей | да |
| Сетка нитей | да | |
| Уровни | Цена деления установочного круглого уровня | нет |
| Цена деления цилиндрического уровня | - | |
| Другое | Диапазон рабочих температур | от -20° до +50°С |
| Масса, не более | 3.9 кг | |
| Масса с футляром, не более | 6.3 кг | |
| Габаритные размеры, Д×Ш×В | 145×200×300 мм |
Электронный теодолит CST/berger 56-BDT30 состоит из горизонтального круга, вертикального круга, зрительной трубы и подставки. Подставка у теодолита съёмная. Горизонтальный и вертикальный круги, как и у оптических теодолитов, выполнены из стекла. Горизонтальный и вертикальный круги градуированы от 0 до 360˚.
Назначение частей теодолитов VEGA TEO 20 и CST/berger 56-BDT30 такое же, как и у теодолита 4Т30П.
Благодаря высокому уровню международной стандартизации и унификации в конструкции приборов различных производителей, в технических характеристиках приборов аналогичной точности, в принципе их работы очень мало отличий. Поэтому пользователям нет необходимости переучиваться для выполнения измерений теодолитом другой фирмы.
Рис. Электронный тахеометр фирмы Leica
Электронный тахеометр объединяет теодолит, светодальномер и микро-ЭВМ, позволяет выполнять угловые и линейные измерения и осуществлять совместную обработку результатов этих измерений. Ведущие производители электронных тахеометрических систем: « Spectra Precision» (Швеция/Германия), «Leica» (Швейцария), «Sokkia», «Topcon», «Nikon», «Pentax» (Япония), «Trimble» (США), «УОМЗ» (Россия).
Автоматическое считывание углов выполняется путем их перевода в электрические сигналы при помощи аналого-цифровых преобразователей (АЦП). Применяют в основном два вида АЦП – кодовый и инкрементальный (цифровой).
При кодовом методе лимб является кодовым диском с системой кодовых дорожек, обеспечивающих создание сигналов 0 и 1 в двоичной системе исчисления.
Для считывания информации с кодовых дисков обычно используют фотоэлектрический способ, при котором диск просвечивают световым пучком, поступающим на фотоприемное устройство, и в результате на выходе получают комбинации электрических сигналов, соответствующих определенным значениям направлений. Затем электрические сигналы поступают в логические схемы, и в итоге измеряемая величина в цифровом виде воспроизводится на табло.
Принципиальная схема углового
Измерительный кодовый диск
преобразователя тахеометра НР-3820
(лимб) на стеклянной подложке
1,4 - диаметрально расположенные считывающие системы точного отсчета; 2 - считывающая система промежуточного (средней точности) отсчета;
3 - считывающая система грубого отсчета.
Кодовый диск содержит систему дорожек для грубого отсчета (напротив
приемника 3 ), для отсчета средней точности - напротив приемника 2, для точного
отсчета - штриховую дорожку (напротив приемника 1, 4).
В инкрементальном методе используют штриховой растр (систему радиальных штрихов), который через одинаковые интервалы (до 100 штрихов на 1 мм) наносят на внешний край лимба. Штрихи и равные им по толщине
интервалы создают последовательность элементов «да-нет», которые называют инкрементами .
Считывание выполняют также оптическим методом, числу прошедших инкрементов соответствует число световых импульсов, поступивших на светоприемник.
Инкрементальный метод является относительным, которым измеряют углы, а кодовым, который является абсолютным, – направления.
Микропроцессоры в электронных тахеометрах используют для
управления, контроля и вычислений. На дисплее по команде с пульта управления процессора могут выдаваться наклонные расстояния, горизонтальные проложения, горизонтальные и вертикальные углы, превышения и др.
В соответствии с заложенными программами в полевых условиях можно решать различные геодезические задачи, результаты выдаются на дисплей, записываются во внутреннюю память или могут быть переданы на подключенный к прибору внешний накопитель информации.
Внешний полевой накопитель хранит полученную в поле информацию для последующей обработки в камеральном вычислительном центре. 57
Современный «парк» теодолитов определяется количеством около 25
моделей и их модификаций. Согласно конструктивным и функциональным особенностям их целесообразно разделить на 4 группы: оптические, электронные (цифровые), лазерные (лазерно-цифровые) и моторизованные теодолиты.
Цифровые (электронные) теодолиты - это приборы, содержащие преобразователь «угол-код», у которых результаты измерений фиксируются на цифровом табло. Основными отличительными особенностями цифровых теодолитов являются:
непрерывный автоматический режим считывания данных угловых измерений с выдачей их на панель управления, состоящей из жидкокристаллического дисплея и клавиатуры,
возможность получения данных угловых измерений в любых используемых в настоящее время единицах: градусы - минуты - секунды, грады (gon), градусы и десятичные доли градуса, тысячные (mil),
а также обнуление отсчетов и выбор направления измерения горизонтального угла.
Лазерный теодолит - специальный геодезический прибор, представляющий собой комбинацию оптического теодолита и оптического квантового генератора (ОКГ), создающего в пространстве видимую световую линию - лазерный луч красного диапазона, который может быть использован в качестве ориентира задаваемого направления.
Лазерные теодолиты предназначены для геодезического сопровождения строительно-монтажных работ (СМР) и управления работой строительных машин и механизмов.
Применение оптических теодолитов с лазерными насадками в СМР делает работу с геодезическими приборами простой и понятной, а в стесненных условиях и на плохо освещенных участках они просто незаменимы.
Приборы могут комплектоваться поворотной призмой, позволяющей строить вертикальные плоскости.
Основной функциональной особенностью моторизованных теодолитов является их автоматическая наводка на заданное направление, для чего они оснащены сервомоторами со скоростью вращения до 45 градусов в секунду. Теодолиты, оборудованные сервомоторами, автоматически устанавливаются в заданном направлении. Эта функция эффективна при выносе проектных координат на местность, выполнении многократно повторяющихся измерений и
наблюдений за деформациями инженерных сооружений.
Читайте также: