
Как сделать регулируемый блок питания из атх часть 2
Достать бывший в употреблении блок питания компьютера сегодня несложно, а стоит он сущие копейки. Но как его можно использовать без самого компьютера? В этой статье мы это выясним, а заодно сделаем своими руками зарядное устройство и лабораторный блок питания (ЛБП) из компьютерного блока питания.
Переделка БП ATX в регулируемый или лабораторный блок питания
А теперь самое время сделать из БП компьютера своими руками импульсный лабораторный блок питания. Дорабатывать будем блок питания, ШИМ-контроллер которого собран на специализированной микросхеме TL494 (она же: μА494, μPC494, M5T494P, KIA494, UTC51494, AZ494AP, KA7500, IR3M02, AZ7500BP, КР1114ЕУ4, МВ3759 и подобные аналоги).
Сразу оговоримся – хотя типовые схемы включения этих микросхем одинаковы, некоторые отличия в зависимости от модели БП все же есть. Поэтому универсального решения для переделки всех БП не существует.
Для примера мы доработаем блок питания, схема которого приведена ниже. Поняв идею вносимых изменений, подобрать алгоритм переделки любого другого блока не составит особого труда.
Разбираем БП, вынимаем плату. Сразу же отпаиваем все ненужные провода шлейфов питания, оставив один желтый, один черный и зеленый.
Также выпаиваем сглаживающие электролитические конденсаторы по всем линиям питания. На схеме они обозначены как С30, С27, С29, С28, С35. Мы собираемся существенно (до 25 В по шине +12 В) поднять выходное напряжение, на которое эти конденсаторы не рассчитаны. На место того, что стоял по шине +12 В, устанавливаем конденсатор той же или большей емкости на напряжение не менее 35 В. Остальные места оставляем пустыми. Зеленый провод припаиваем на место, где был любой черный, чтобы разрешить блоку питания запускаться. Теперь можно заняться доработкой контроллера.
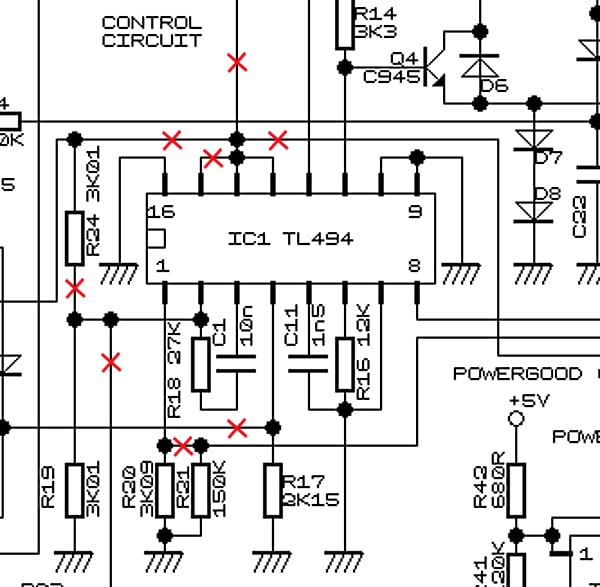
Взглянем на назначение выводов микросхемы TL494. Нас интересуют два узла – усилитель ошибки 1 и усилитель ошибки 2. На первом собран стабилизатор напряжения, на втором – контроллер тока. То есть нас интересует обвязка выводов 1, 2, 3, 4, 13, 14, 15, 16.

Изменим схему обвязки таким образом, чтобы усилитель ошибки 1 отвечал за регулировку выходного напряжения, а усилитель 2 – за регулировку тока. В первую очередь перережем дорожки, обозначенные на приведенной ниже схеме крестиками.
Теперь находим резисторы R17 и R18. Первый имеет сопротивление 2.15 кОм, второй 27 кОм. Меняем их на номиналы 1.2 кОм и 47 кОм соответственно. Добавляем в схему два переменных резистора, один постоянный на 10 кОм (отмечены зеленым), клеммы для подключения внешнего потребителя, амперметр и вольтметр. В результате у нас получится вот такая схема.
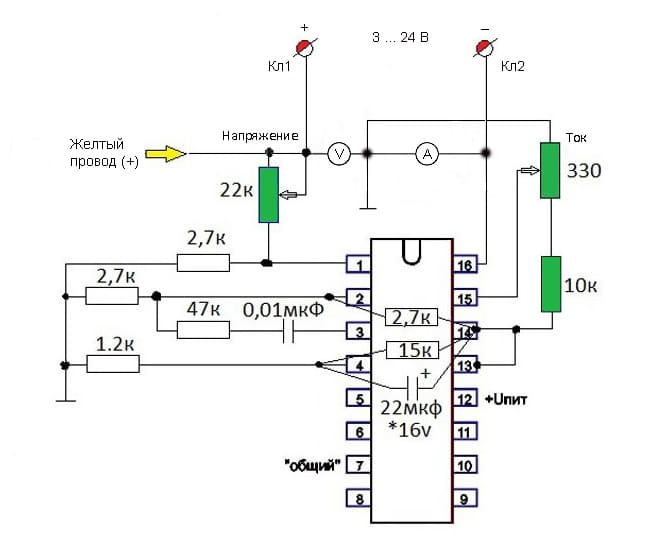
Как видно из схемы, резистор на 22 кОм позволяет плавно регулировать напряжение в пределах 3-24 В, резистор 330 Ом – ток от 0 до 8 А. Кл1 и КЛ2 служат для подключения нагрузки. Вольтметр имеет предел измерения 25-30 В, амперметр – 10 А. Приборы могут быть как стрелочными, так и с цифровыми шкалами, главное, малогабаритными – ведь они должны войти в корпус блока питания. Можно начинать проверку и градуировку.

Первое включение нашего лабораторного блока питания производим через лампу накаливания 220 В мощностью 60 Вт. Это поможет избежать проблем, если мы наделали ошибок в монтаже. Если лампа не светится или светится вполнакала, а блок питания запустился, то все в порядке. Если лампа горит в полный накал, а блок питания молчит, то придется искать ошибки.

Все в порядке? Включаем БП напрямую в сеть, выводим движки резисторов в нижнее по схеме положение. К клеммам КЛ1, Кл2 подключаем нагрузку – 2 лампы дальнего света, включенные последовательно. Вращаем резистор регулировки напряжения и убеждаемся по встроенному вольтметру, что напряжение плавно изменяется от 3 до 24 вольт. Для верности подключаем к клеммам контрольный вольтметр, к примеру, тестер. Градуируем ручку регулятора напряжения, ориентируясь по показаниям приборов.
Возвращаем движок в нижнее по схеме положение, выключаем блок питания, а лампы соединяем параллельно. Включаем блок питания, устанавливаем регулятор тока в среднее положение, а регулятор напряжения – на отметку 12 В. Вращаем ручку регулятора тока. При этом показания амперметра должны плавно изменяться от 0 до 8 А, а лампы – плавно менять яркость. Градуируем регулятор тока, ориентируясь по показаниям амперметра.
Отключаем устройство и собираем его. Наш лабораторный блок питания готов. С его помощью мы можем получить любое напряжение от 3 до 24 вольт и устанавливать ограничение тока через нагрузку в пределах 0-10 А.
Как включить блок питания (БП) от компьютера без компьютера
Итак, у нас в руках блок питания ATX компьютера. Прежде всего попробуем его включить. Но для этого нужно знать некоторые тонкости работы этого устройства. Предположим, перед нами компьютер. Включаем его в сеть, но внешне ничего не происходит. Это, казалось бы, понятно – машина отключена, а чтобы ее включить, нужно нажать кнопку питания на лицевой панели системного блока.
На самом деле это не совсем так. Как только мы вставили вилку в розетку, в блоке питания заработала небольшая часть схемы, вырабатывающая дежурное напряжение +5 В. Называется эта часть модулем дежурного питания. Напряжение поступает на материнскую плату и питает ее отдельные узлы, один из которых предназначен для включения компьютера.
Важно. В большинстве блоков питания ATX предусмотрен дополнительный служебный механический выключатель, расположенный на задней стенке ПК. Напряжение сети на БП этих моделей подается после включения этого тумблера.

Нажимая кнопку на лицевой панели системного блока, мы тем самым подаем команду материнской плате (точнее, ее узлу включения) запустить блок питания. Узел подает на БП сигнал Power on , и БП, а значит, и сам компьютер включаются.
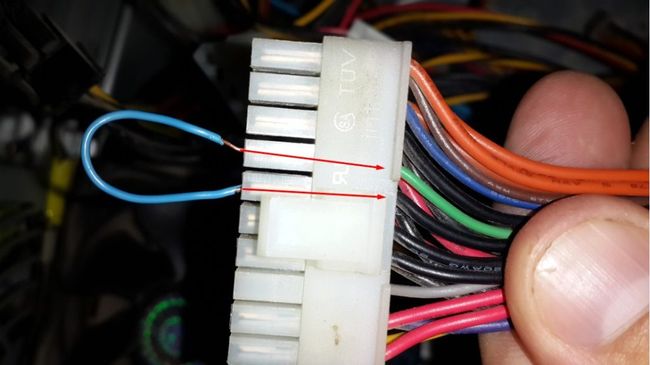
Поскольку компьютера у нас нет, этот сигнал нам придется подать самостоятельно. Сделать это несложно. Для этого достаточно найти разъем на блоке питания, который питает материнскую плату, и установить перемычку между зеленым и любым из черных проводов. Итак, устанавливаем перемычку, подключаем блок питания к сети, и он сразу же запускается – это слышно даже по шуму вентилятора.
Зарядник с регулировкой тока и напряжения
Теперь попробуем переделать компьютерный БП так, чтобы можно было плавно регулировать напряжение и ток зарядки. Это позволит обслуживать батареи любой емкости и на любое напряжение. Кроме того, это зарядное устройство имеет защиту от короткого замыкания, перегрузки и перегрева. С его помощью можно изменять зарядное напряжение от 0 до 25 В и ток от 0 до 8 А.
В первую очередь производим манипуляции, которые подробно описаны в пункте «Прибор для зарядки постоянным напряжением». Выпаиваем лишние провода, оставив желтый, черный и зеленый. Меняем сглаживающий конденсатор на шине +12 В на прибор с напряжением 35 В. Подключаем зеленый провод на общую шину.
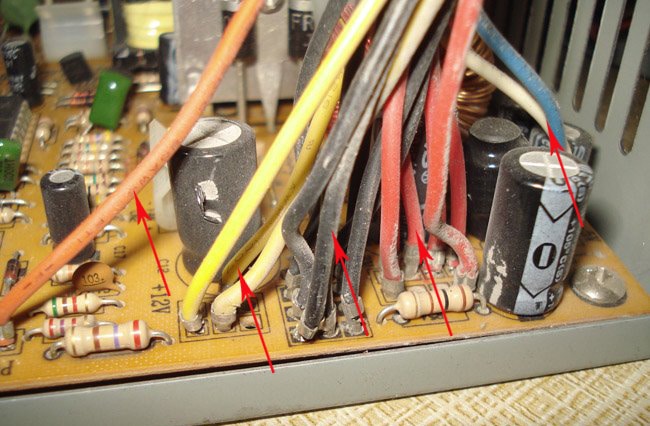
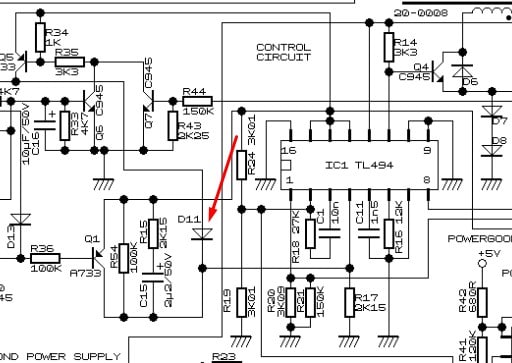
Теперь надо поднять напряжение на шине +12 В до величины 28 В. Для этого удаляем резисторы, соединяющие первый вывод ШИМ контроллера с шинами +5 и +12 В. На схеме ниже они обозначены стрелками.
Теперь ШИМ контроллер будет работать «на всю», а напряжение на шине +12 В поднимется до максимума – 28 В. Но опять сработает защита по перенапряжению. Отключаем ее так же, как и в конструкции выше: выпаиваем диод, помеченный на схеме ниже стрелкой.
Включаем блок питания и измеряем напряжение между желтым и черным проводами – оно должно увеличиться до указанных значений. С блоком питания все. Теперь перейдем к сборке узла регулировки напряжения и тока, представленного на схеме ниже.

На транзисторах VT1 и VT2 собран простейший узел регулировки напряжения. Сама регулировка осуществляется при помощи потенциометра R14. В узле управления током используются микросхемы DA2 и DA4, представляющие собой интегральные регулируемые стабилизаторы напряжения/тока. Каждая из микросхем способна выдать ток до 5 А. Включив их параллельно, мы удвоили это значение. Регулировка тока производится потенциометром R17. Резисторы R7 и R8 – токовыравнивающие. Далее напряжение через амперметр PA1 подается на клеммы, к которым подключается заряжаемая батарея. Напряжение на батарее контролируется при помощи вольтметра PV1.
Вольтметр и амперметр можно использовать любые – хоть цифровые, хоть стрелочные. Первый должен иметь предел измерения 30 В, второй – 10 А. В качестве токовыравнивающих резисторов используются отрезки монтажного провода длиной 20 см и сечением 1 мм. кв. Если блок выполнен навесным монтажом, то в их качестве будут выступать монтажные провода.
Мощный полевой транзистор, который можно взять из неисправного компьютерного БП, и микросхемы стабилизатора устанавливаются на общий радиатор через слюдяные прокладки. Очень удобно использовать для этих целей радиатор от процессора ПК. Ниже представлен один из возможных вариантов монтажа блока регулировок.

Если все готово, то включаем зарядное устройство, нагружаем его лампой дальнего света и проверяем работу, регулируя выходные ток и напряжение и контролируя их по приборам.
Что касается защиты, то она уже встроена в микросхемы DA2 и DA4. Эти приборы имеют внутреннюю защиту от перегрузки, короткого замыкания и перегрева.
Вот мы и разобрались с тонкостями доработки компьютерных блоков питания. Теперь нам не составит труда переделать их в зарядное устройство для автомобильного аккумулятора или лабораторный блок питания.

Всем здрасьте!
Хочу поведать о своем опыте переделки компьютерного БП ATX в лабораторный БП с регулировкой напряжения и тока.

Подобных переделок в сети полно, но обычно все переделывают схемы на базе ШИМ TL494 и её клонов (KA7500, AZ7500BP и т.д.), я же хочу поведать о переделке блока на базе ШИМ GM3843 (UC3843).
В первую очередь хочу сказать спасибо Андрею 2350 за его замечательную статью про переделку блока. Я то же пытался сделать блок на TL494, но так и не смог полностью победить возбуд на некоторых крайних режимах. В какой-то момент я просто утомился и решил пойти своим путем. Так же хочу сказать спасибо Старичку за схему БП, в которой я увидел простое и логичное решения для схемы регулирования. К сожалению я не сразу узнал кто ее автор, а надо было бы.
Некоторое время назад я делал себе зарядное устройство для гаража из блока на GM3843, но там минимальные переделки по самому блоку для увеличения выходного напряжения до 14.4В, и линейный стабилизатор тока на операционнике и мощном мосфете. Мне очень понравился конструктив блока, схема уверенно питала мощный компрессор от блокировки дифференциала током 25А при напряжении 14.4В (это 360Вт если что) при номинальной мощности блока в 350Вт, при этом надо учитывать что пусковой ток компрессора еще больше! Все остальные блоки, в том числе и на 600Вт, стабильно при этом уходили в защиту.
В принципе, таким образом можно переделать фактически любой БП, где в обратной связи силовой части стоит оптопара.
Под переделку мне попала плата от блока POWERMAN мощностью 250Вт, от 350Вт отличается только размером трансформатора, конструктивом снаббера, емкостью электролитов по входу и максимальным током силового мосфета. В блоке 250Вт стоит W9NK90Z (8 А), а в 350 Вт W12NK90Z (11 А).
Вот подправленная схема такого БП:
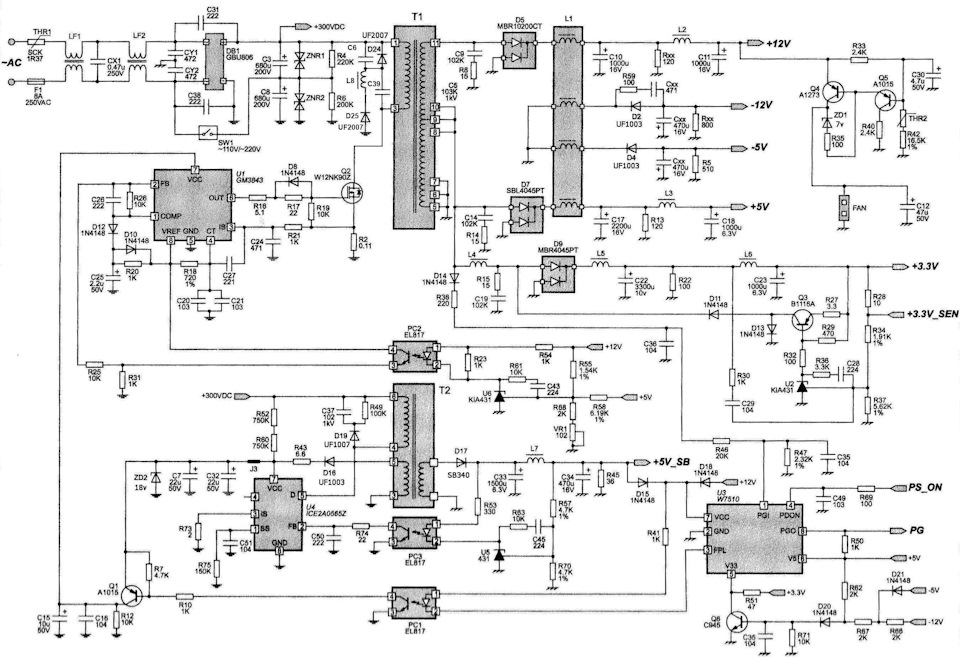
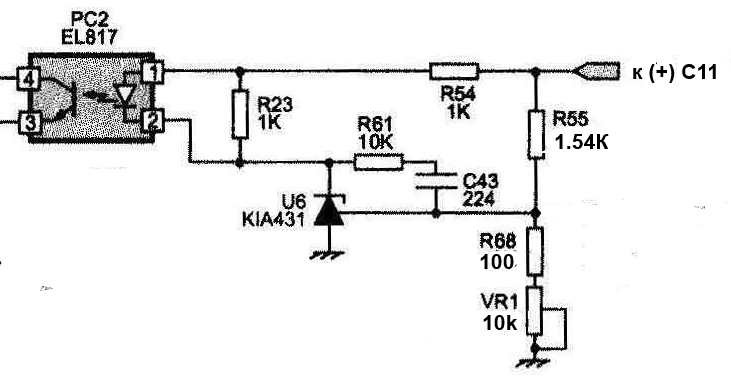
Схема имеет прямоходовую топологию. Избавляемся от 5-ти вольтовой цепи, убираем супервизор W7510, отключаем схему питания вентилятора, меняем выходные емкости на более высоковольтные, а в обратной связи PC2 собираем такую схемку:
После включения питания должна заработать только дежурка. Проверяем на ней 5 В, затем замыкаем вывод 2 PC1 на землю, должна запуститься силовая часть. Теперь испытываем блок на его возможности. Мой выдал на холостую максимум 40В, не забудьте про конденсаторы на выходе, их предельное напряжение должно быть с запасом.
В качестве нагрузки я использовал резистор 1 Ом мощностью 50 Вт на радиаторе, но на 400 Вт он почему-то взорвался :), так что пришлось использовать автомобильные лампочки от фар.
После испытаний беремся за переделку дежурки.
Вот примерная схема того что должно остаться:
Красным отмечены те элементы, номиналы которых необходимо изменить, либо добавить такой элемент если его нет.
Схема регулирования вполне может работать и от 5 В (UPD^ 27.09.2017 как выяснилось от 5 В не работает нормально, так что 12 В необходимо), но для вентилятора этого мало, так что пришлось переделывать дежурку на 12 В. К сожалению просто переделать обвязку U5 (TL431) не получилось, так как в таком случае выросло напряжение на обмотке питающей U4 и U1. Сначала я увеличил сопротивление резистора R43 до 46 Ом, но силовая часть отказывалась запускаться одновременно с дежуркой, видимо GM3843 довольно прожорлива и просаживает питание не дав толком запуститься дежурке. Если сначала запустить дежурку, а потом силовую часть замыканием 2 ноги PC1 на землю, то все работает нормально. Я решил не вносить изменений в работу этой цепи и пошел по сложному пути, просто перемотал транс T2, его выходная обмотка содержала 9 витков, а теперь содержит 22 витка. Здесь сложность оказалась в том что транс намотан вперемешку слоями и нужная вторичка оказалась в глубине. После перемотки транса схема все равно отказалась запускаться, пришлось сделать отдельный выключатель для запуска силовой части. В последствии смог победить этот баг просто повесив параллельно PC1 электролит на 50 мкФ, тем самым отсрочив открытие транзистора оптопары (UPD^ 27.09.2017 Есть более простой способ. На алиэкспрессе заказываем копеечную платку повышающего преобразователя с 5 В на 12 В, тогда дежурку вообще трогать не надо).
Схема управления представляет собой всего два компаратора, собрана на одной плате с переменными резисторами. В качестве токового датчика использовал шунт на 50 А сопротивлением 0.0015 Ом. Минус всей платы управления берем прям со входа шунта, чтобы исключить влияние проводов. Схема довольно примитивна и не должна вызвать сложностей в понимании. Отдельно хочу сказать про мое больное место — цепи коррекции. По напряжению все гладко, R5 и C1 взятые от фонаря подошли идеально, а вот с током пришлось повозиться и даже сжечь один комплект силовой части (как правило горит Q2, U1, R17 и предохранитель). В результате появился C5 и R11. Можно обойтись без R11 увеличив емкость C5 до 1 мкФ.
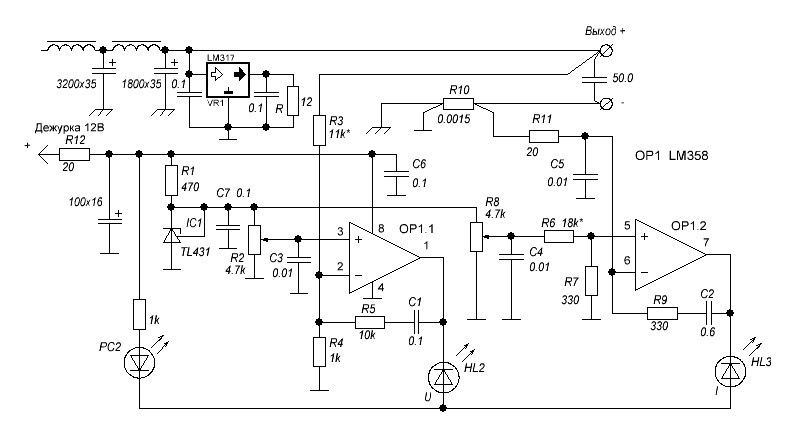
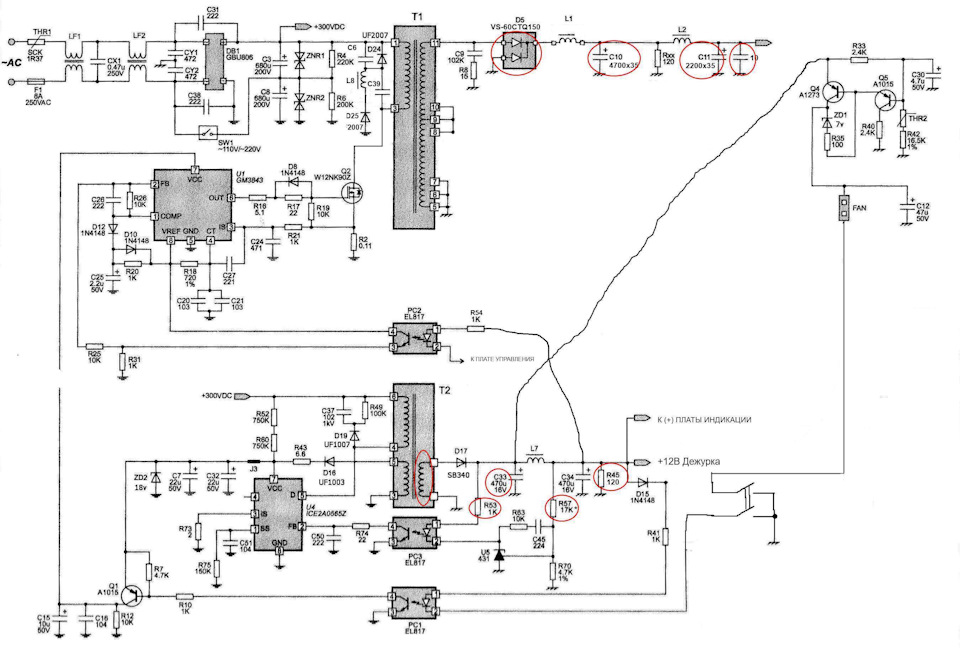
Теперь о деталях. Операционники в схеме регулирования LM358, в качестве выходного диода у меня стоят 2 сборки MBR20100CT параллельно (на плате было место под вторую сборку), вроде работают нормально, но лучше поставить на 150 В или даже на 200 В, например VS-60CTQ150, поскольку обратные выбросы достигают 150 В. Электролитические конденсаторы лучше с низким эквивалентным сопротивлением, так называемые low ESR. К сожалению их выбор на 35 В не велик, можно поставить несколько в параллель EEUFR1V182L (1800 мкФ, 35 В). Дроссель намотан на кольце групповой фильтрации от какого-то мощного БП ATX, содержит 30 витков сложенного вдвое провода ПЭТВ-2 1.5мм. Переменные резисторы СП5-35А весьма хитрой конструкции, благодаря им нет необходимости ставить дополнительный резистор для точной установки тока и напряжения. На выходе блока параллельно клеммам стоит керамический конденсатор на 50 мкФ, он состоит из 5 СМД конденсаторов по 10 мкФ запаянных в параллель на небольшой платке прямо под гайками клемм.
Индикация выполнена на сдвоенном модуле, заказанном на алиэкспрессе. Поскольку модуль был расчитан максимум на 10 А, пришлось добавить делитель и замазать точку. Как перенести точку на соседний индикатор я не знаю, там динамическая индикация и нужно менять прошивку. При указанных номиналах резисторов R4, R3, R6, R7 максимальное напряжение составит 30 В, а ток 30 А. Ограничение по мощности блока можно выставить резистором R2. При наладке рекомендую поставить туда 0.2 — 0.3 Ом.
Собственно все. На данный момент блок нормально вытягивает до 300 Вт, переход с режима стабилизации напряжения в режим стабилизации тока происходит без срыва генерации, возбудов в любых режимах нет, и самое главное, в режиме КЗ полная тишина и на осцилографе красивая картинка, просто мячта! На TL494 такого добиться мне не удавалось.
На холостом ходу нагрузкой для блока является линейный стабилизатор LM317 включенный по схеме источника тока. От резистора пришлось отказаться т.к. при большом выходном напряжении он будет греться как паровоз, а LM317 я поставил на радиатор вместо одного из диодов шоттки, выпаянных из схемы. При большом напряжении ЛМ-ка начинала возбуждаться, поэтому я зашунтировал ее керамикой.
Если нужен блок питания для нестандартных условий, можно воспользоваться построением с низкочастотным трансформатором. Такое решение просто в реализации и не требует особо глубоких специальных знаний, но есть у него и ряд недостатков – большие габариты, низкий КПД и качество стабилизации выходных напряжений. Можно изготовить импульсный БП, но это довольно сложная процедура с массой подводных камней – при малейшей ошибке будет «хлопок» и куча ненужных деталей.
Попробуем снизить планку и ограничимся модернизацией обычного компьютерного блока питания ATX под необходимые требования. Гм, а что именно станет предметом рассмотрения? Вообще-то, 300-400 ваттный БП может обеспечить довольно значительную мощность, область применения у него большая. В одной статье трудно объять необъятное, поэтому ограничимся самым распространенным – усилителем низкой частоты, под него и попробуем осуществить переделку.
Блок питания довольно большой мощности, хотелось бы его использовать по максимуму. Из 12 вольт мощный усилитель не сделать, здесь требуется совсем другой подход – двуполярное питание с выходным напряжением явно побольше 12 В. Если БП будет запитывать самодельный усилитель, собранный из дискретных элементов, то его напряжение питания может быть любым (в разумных пределах), а вот интегральные микросхемы довольно придирчивы. Для определенности возьмем усилитель на TDA7294 – напряжение питания до 100 В (+/-50 В) с выходной мощностью 100 Вт. Микросхема обеспечивает ток в динамике до 10 ампер, что определяет максимальный ток нагрузки блока питания.
Вроде всё ясно, остается уточнить уровень выходного напряжения. Допускается работа от источника питания 100 вольт (+/-50 В), но попытка выбора такого значения выходного напряжения оказалась бы большой ошибкой. Микросхемы крайне отрицательно относятся к предельным режимам работы, особенно при одновременном максимальном значении нескольких параметров - напряжения питания и мощности. К тому же, вряд ли в обычной квартире есть смысл обеспечивать столь высокий уровень мощности, даже для низкочастотных динамиков с их низкой эффективностью.
Можно установить напряжение в 90 вольт (+/- 45 В), но это потребовало бы очень точного удержания выходного напряжения – в многоканальных блоках питания весьма затруднительно обеспечить одинаковость напряжений на разных выходах. Поэтому стоит немного снизить планку и установить номинальное напряжение для этой микросхемы 80 вольт (+/-40 В) - мощность усилителя немного упадет, но устройство будет работать с должным запасом прочности, что обеспечит достаточную надежность устройства.
Кроме того, если звуковая колонка будет работать не только в низкочастотной области, но еще содержит средне-высокочастотные каналы усилителей, то стоит получить от БП еще одно напряжение, меньше «+/-40 В». Эффективность работы низкочастотных динамиков большого диаметра существенно ниже более высокочастотных, поэтому запитывание усилителя СЧ-ВЧ канала от тех же «+/-40 В» довольно глупо, основная масса энергии уйдет в тепло. Для второго усилителя хорошо бы обеспечить выход +/-20 вольт.
Итак, спецификация блока питания, который хочется получить:
- Канал № 1 (основной), напряжение: «+/-40 В».
- Ток нагрузки от 0.1 А до 10 А.
- Канал № 2 (дополнительный), напряжение: «+/-20 В».
- Ток нагрузки от 0 до 5 А.
Характеристики определены, осталось выбрать подходящую модель. Совсем уж старый использовать нет никакого желания, конденсаторы давно уж высохли, да и схемные решения тех времен не внушают оптимизма. Стоит отметить, что часть «современных» блоков питания тоже не блещет качеством работы и надежностью, но с этим можно бороться – достаточно выбирать продукцию известных фирм, к которой есть доверие.
Кроме философского осмысления сущности БП и отбора по внешнему виду, есть вполне осмысленный критерий – их тип. Блок может быть выполнен по технологии «двухтактный полумост» или «однотактный прямоход», содержать в себе какую-то разновидность PFC (активную или пассивную на дросселе). Всё данные факторы оказывают влияние на качество работы и уровень помех. Причем, это не «просто слова», при переходе от трансформаторного БП на «импульсный» довольно часто замечается ухудшение качества звучания.
реклама
С одной стороны, «странно», ведь такой БП обеспечивает лучшую стабильность напряжения питания усилителя. С другой, ничего странного нет – «импульсник» производит помеху при переключении силовых транзисторов основного преобразователя (и блока APFC), что выражается в высокочастотных «всплесках» на цепях питания и земли. Чаще всего преобразователь БП работает на частоте 40-80 кГц, что выше звукового диапазона, а потому вроде бы не должно мешать устройству, но помехи распространяются по всему усилителю и сбивают рабочую точку усилительных каскадов, что приводит к интермодуляционным искажениям, звук становится «жестче». В компьютерном блоке питания шины 12 В и 5 В выглядят следующим образом:

Так что, проблема не надуманная и на борьбу с ее негативным проявлением следует потратить некоторые усилия.

Ничего необычного, классическая компоновка, разве что дроссель PFC вносит в картинку некоторый элемент дисгармонии. К слову, измерение характеристик и величины пульсаций на выходе показало, что наличие этого дросселя приводит лишь к тому, что блок питания становится тяжелее и немного «гудит» при мощности нагрузки 250-300 Вт.
Компьютерный блок питания должен формировать массу напряжений большой мощности – 12 В, 5 В, 3.3 В, -5 В, смысл в которых сразу теряется, как только речь заходит об усилителе. Кроме того, БП содержит дежурный источник 5 В, но его лучше не трогать и сохранить в неизменном виде – во-первых, он используется для работы основного преобразователя, во-вторых, можно будет реализовать включение-выключение усилителя от внешнего управления или просто по появлению звукового сигнала на входе усилителя. Это функция потребует изготовления высокочувствительного детектора с питанием от 5 вольт и вряд ли кто-нибудь станет делать этот элемент на начальной стадии сборки усилителя, ну хоть возможность такая останется. Пусть будет, это «бесплатно».
После удаления всех цепей формирования выходных напряжений получилось следующее:

Оказалось не так много места, поэтому доработка не должна содержать слишком много деталей – банально не влезет. Фу ты, еще заложили в требования наличие двух выходных каналов.
Компьютерный блок питания формирует два основных выхода: 12 В и 5 В, этим объясняется наличие всего двух пар вторичных обмоток. Каким способом можно получить напряжение больше, чем заложено при проектировании БП?
1. Перемотать трансформатор.
2. Поставить умножитель.
3. Добавить второй трансформатор.
реклама
Первый вариант понятен и прост в техническом плане. Одно «но», конструкция импульсного трансформатора не так проста, как может показаться на первый взгляд. Существует масса требований и ограничений, не выполнив которых можно получить либо «крайне посредственный вариант», либо, что гораздо хуже, некачественную изоляцию вплоть до поражения электрическим током. В трансформаторе первичная обмотка выполнена из двух частей. Первая расположена в самом начале, а потому не мешает перемотке, а вот вторая наматывается самой последней.
Трудности умножаются тем, что между первичной и вторичной обмотками присутствует электростатический экран из медной ленты. Чтобы осуществить перемотку придется аккуратно смотать верхнюю часть первичной обмотки, убрать экран и вторичные обмотки. После чего намотать новые вторичные обмотки, восстановить экран и первичную обмотку. Естественно, между обмотками и экраном должна быть надежная изоляция. Дело усугубляется тем, что трансформатор пропитан лаком, а потому его разборка-сборка занятие «увлекательное» и качество выполнения доработки окажется не слишком хорошим. Впрочем, если у вас руки «прямые» и есть желание попробовать – некоторые рекомендации:
И всё же я бы не рекомендовал этот вариант переделки для тех, у кого нет опыта намотки импульсных трансформаторов. Не стоит, может выйти боком. К слову, если человек разбирается в вопросе, то ему проще намотать трансформатор полностью «с нуля», по крайней мере, не будет путаться под ногами этот «лак», да и число витков во всех обмотках можно будет выбрать оптимальным.
Второй вариант довольно сложен в реализации и обладает рядом серьезных недостатков. Пример такого построения изображен на рисунке:
- TV1 – обычный трансформатор блока питания, без каких-либо доработок.
- TV1.1 – первичная обмотка.
- TV1.3 и TV1.4 – обмотки канала 5 В.
- TV1.2 и TV1.5 – обмотки, совместно с TV1.3 и TV1.4 формирующие канал 12 В.
Для анализа важен тот факт, что форма импульсов напряжения на выходе трансформатора с гладким верхом, а не «синус», «пила» или другие вариации. Устройство работает следующим образом - на первичной обмотке следуют импульсы напряжения прямоугольной формы с некоторой скважностью. Напряжение импульсов на первичной обмотке составляет половину напряжения питания или около 140 В при номинальном напряжении сети. На вторичной стороне форма импульсов сохраняется, а амплитуда зависит от числа витков и распределяется примерно как 9 В на обмотках «канала 5 В» (TV1.3 и TV1.4) и 21 В на «канале 12 В» (TV1.2+TV1.3 и TV1.4+ TV1.5).
Предположим, что в данный момент поступает импульс положительной полярности и на верхних выводах обмоток следует «+». Расставим напряжения в контрольных точках:
- A = +21 В.
- B = +9 В.
- С = -9 В.
- D = -21 В.
Отсюда можно сразу вычислить напряжение в токе «F», оно будет чуть меньше цепи «B» на величину падения напряжения на диоде D1.
При данной полярности диод D2 закрыт, поэтому напряжение в точке «E» будет определено при противоположной полярности импульса.
- Напряжение на конденсаторе C2 = +8.4 – (-21) = 29.4 В.
Сменим полярность импульса, напряжения в контрольных точках поменяют знак:
- A = -21 В.
- B = -9 В.
- С = +9 В.
- D = +21 В.
Полярность сменилась и открывается диод D2. Напряжение в точке «F» станет чуть меньше цепи «B» или около +8.4 В.
- E = +8.4 В.
- Напряжение на конденсаторе C1 = +8.4 – (-21) = 29.4 В.
Схема симметричная, поэтому напряжения конденсаторов обязаны быть одинаковыми. Из анализа предыдущей полярности импульса следует, что
- Напряжение в точке «F» смещено относительно точки «D» на величину напряжения конденсатора С2 (29.4 В) и равно +21 + 29.4 = +50.4 В.
Нет смысла анализировать аналогичное состояние точки «E» при смене полярности импульса, схема симметричная и там будет столько же, сколько сейчас на точке «F», +50.4 В.
В итоге, может интересовать только «E» и «F», ведь из них получается выходное напряжение. Соберем значения в этих точках в таблицу. Впрочем, забыл еще одно состояние, «пауза» импульса от ШИМ-регулировки. Этот случай очень прост, на всех обмотках нулевое напряжение и в точках «E» и «F» получается одно и то же напряжение +29.4 В, хранимое в конденсаторах. (При анализе не учитывалась конечная емкость конденсаторов и непрямоугольность формы импульсов).
Выпрямительная сборка D3 «выбирает» наибольшее напряжение из двух входов («E» и «F»). Это означает, что на входе дросселя L6 будут идти импульсы амплитудой 50 В с паузой 8 В. При скважности ШИМ 70% на выходе сформируется напряжение примерно 37 вольт.
Всё сказанное относилось к получению повышенного напряжения положительной полярности. Если необходимо сформировать и отрицательный выход, то схему следует «удвоить» – добавить конденсаторы C1, С2 и C3, диоды D1 и D2, пару диодов в сборку D3 и намотать вторую обмотку на выходном дросселе. Не забудьте сменить полярность конденсаторов и диодов.
У подобного решения только одно достоинство – не придется что-то делать с трансформатором. Впрочем, есть еще одно - незначительное, девиация напряжения на выходном дросселе небольшой амплитуды, поэтому размеры дросселя и его индуктивность могут быть сниженной величины. Фактически, можно использовать старую обмотку канала 12 В.
Недостатков больше и они серьезные:
- Весь импульсный ток протекает через повышающие конденсаторы С1 и С2.
- Очень большой ток заряда конденсаторов в начальный момент времени. Кроме снижения срока службы конденсаторов, высокая величина тока может вызвать срабатывание общей защиты блока питания и он отключится.
- Низкий диапазон регулирования выходного напряжения.
- Невозможно получить больше одного канала со стабилизацией выходного напряжения. Выходы «+37 В» и «-37 В» получаются по вышеприведенной схеме, а вот обычные «+/-12 В» придется формировать на отдельном дросселе при повышенном уровне пульсаций с частотой сети и низкой стабильностью.
Основной недостаток схемного решения - весь ток протекает через конденсаторы С1 и С2. Довольно просто найти конденсаторы с подходящей емкостью или ESR, но вот величина импульсного тока у них окажется низка. Чтобы не быть голословным, подберем подходящий конденсатор для рассматриваемого блока питания усилителя (выходное напряжение соответствует заданным условиям, величина тока до 10 А).
Ранее я ссылался на конденсаторы общего применения фирмы Jamicon серии LP, посмотрим, что есть в данном исполнении – 2200 мкФ 50 В. Максимальный ток 2 ампера. Совершенно не подходит, конденсатор выйдет из строя через неделю работы усилителя. Переходим к серьезным сериям, «Low ESR». Например, серия WL:
В круглых скобках указывается характеристики альтернативного варианта исполнения корпуса конденсатора.
Хочется отметить интересный момент, для конденсатора «680 мкФ 35 В» первое исполнение, в сравнении со вторым, несет меньшее внутреннее сопротивление и максимальный ток, обычно происходит обратное – снижение ESR повышает величину тока. Видимо, причина в разной площади поверхности корпуса.
Если смотреть на ESR, то все конденсаторы вполне устраивают. Ну, сколько может «упасть» на сопротивлении 40-90 мОм при токе 3-8 ампер? Пустяк. Блок питания работать будет. Вот так и появляются «китайские» поделки. К слову, в Китае производится масса качественной продукции, это местные фарцовщики закупают хлам, отсюда и происходит недоверие к китайской продукции … причем зря.
Ну ладно, собираем для себя, поэтому делать плохо не будем. Конденсатор должен выдерживать ток не менее 10/2=5 А в долговременном режиме и на одном конденсаторе получить такую характеристику не удастся. Остается вариант с установкой пары или тройки конденсаторов параллельно. Два конденсатора «1000 мкФ 35 В» обеспечат ток до 5 (4.2) ампера, что маловато. Можно взять конденсаторы того же номинала, но чуть большего напряжения «1000 мкФ 50 В», предельный ток составит величину 6.4 (5.6) ампера.
С учетом конечной индуктивности выходного дросселя этот вариант может устроить, но не особо хорошо. Перейдем к утроению конденсаторов, «680 мкФ 35 В» обеспечит ток до 6 (5.1) А, или «680 мкФ 50 В» 7.8 (6.9) А. Последний вариант смотрится уже веселее, блок питания сможет работать достаточно долго.
В результате получается, что в блок питания придется установить 3*2*2=12 конденсаторов «680 мкФ 50 В», выйдет не самое компактное устройство, а место в БП ограничено.
Схема моделировалась, но практически не испытывалась, поскольку не лежит у меня душа к таким решениям. Этот вариант доработки дается на ваш страх и риск.
Подпишитесь на наш канал в Яндекс.Дзен или telegram-канал @overclockers_news - это удобные способы следить за новыми материалами на сайте. С картинками, расширенными описаниями и без рекламы.
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
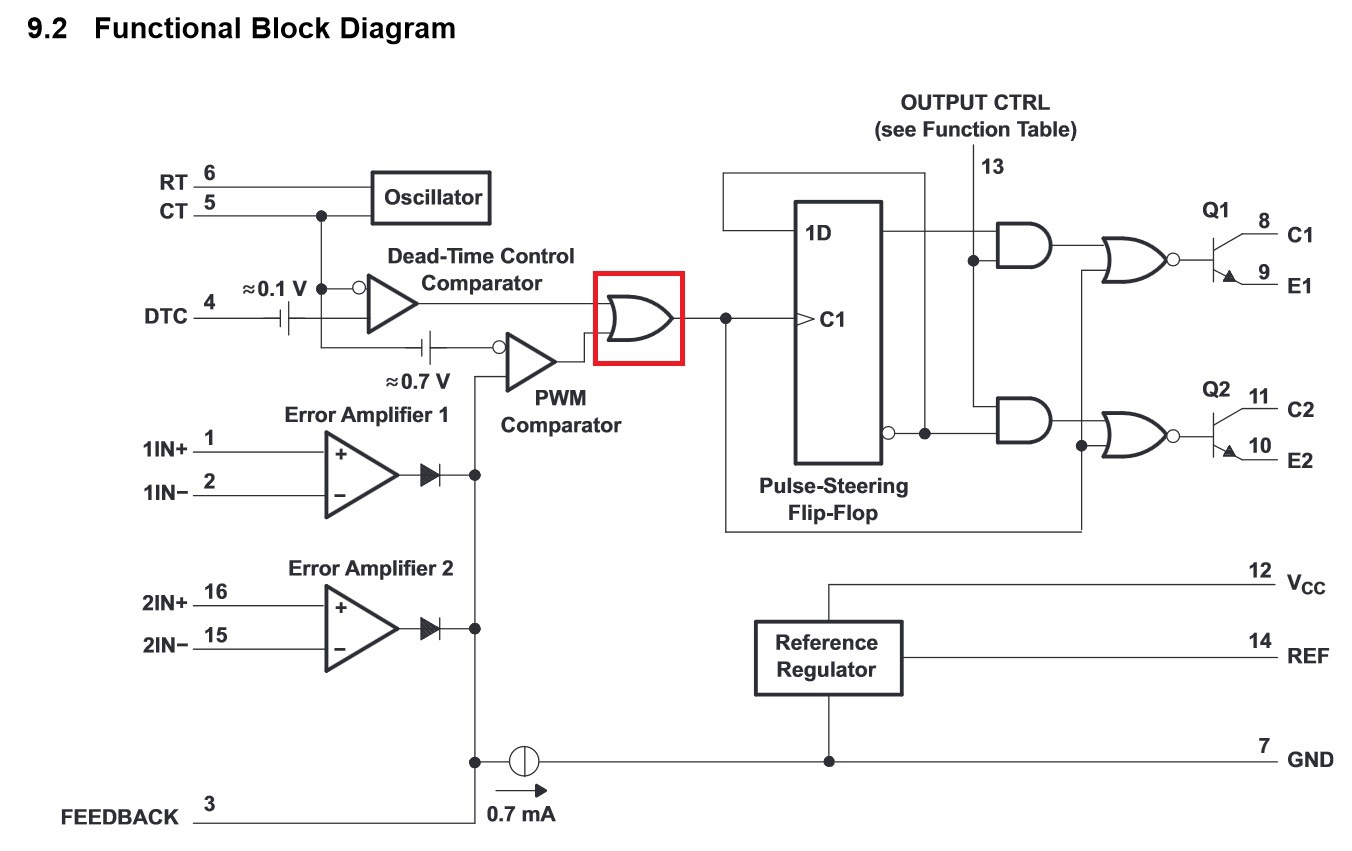
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
От теории к практике
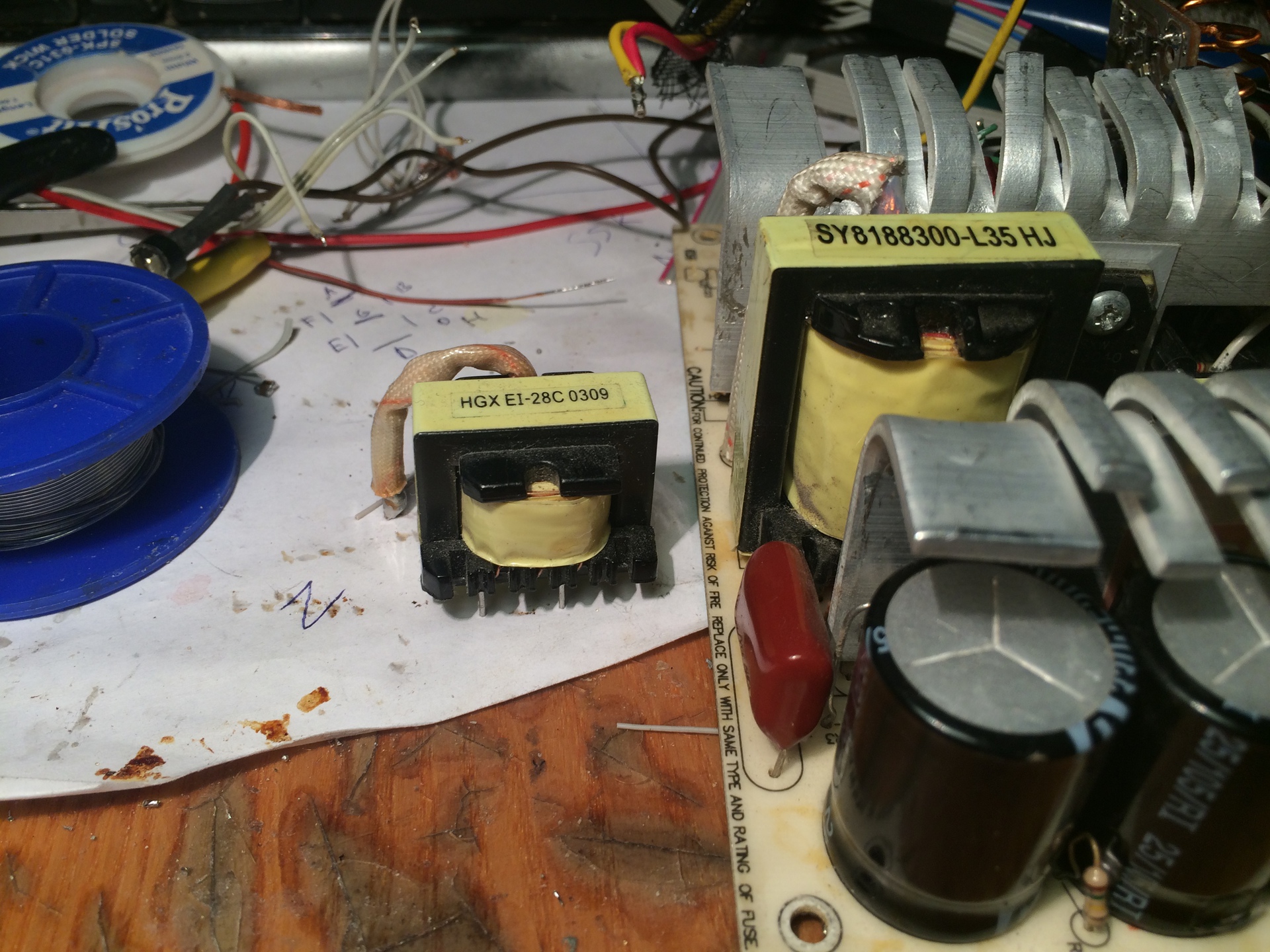
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.

Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
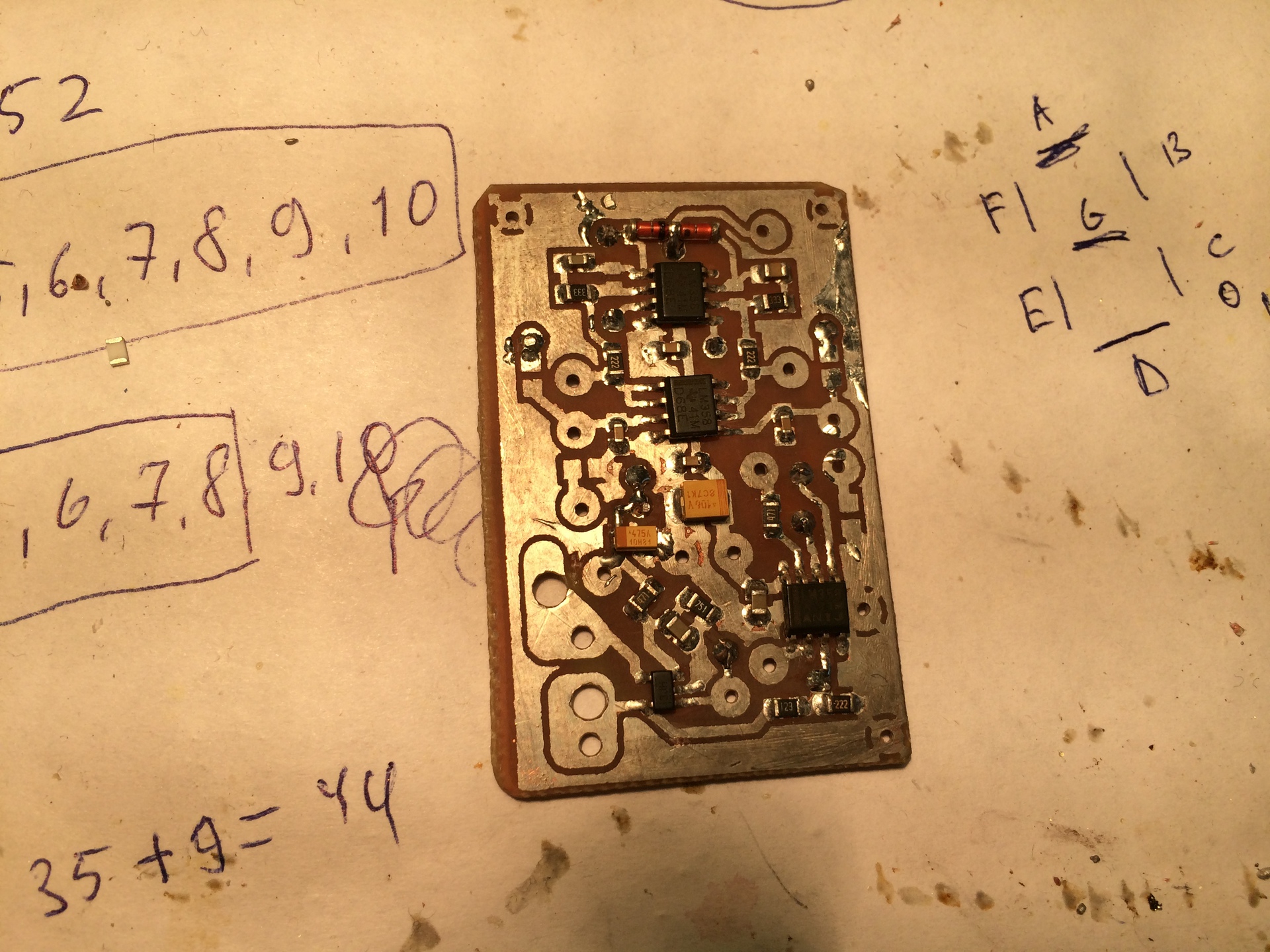
По этой схеме лазерным утюгом была изготовлена плата:
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
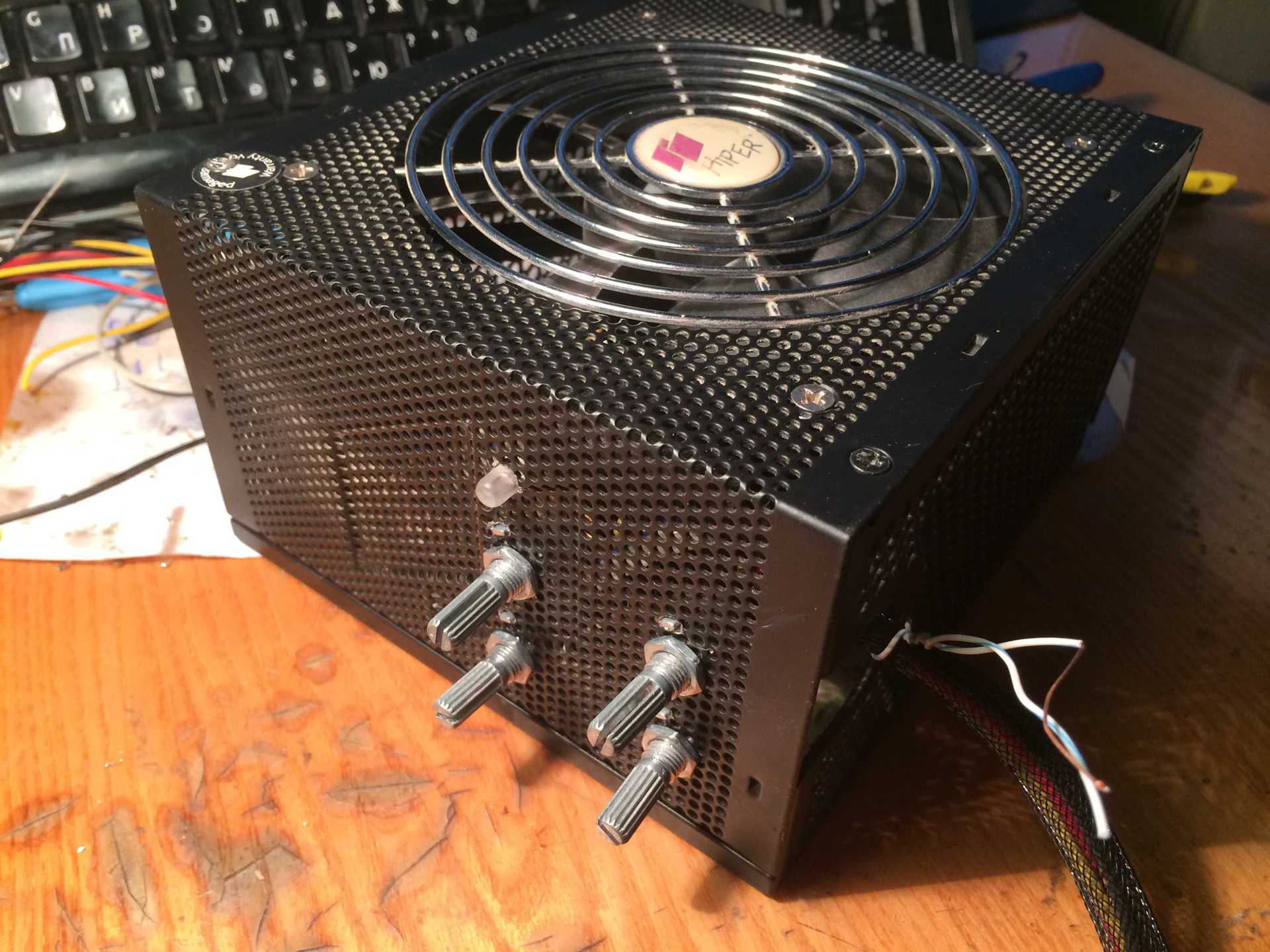
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper'a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
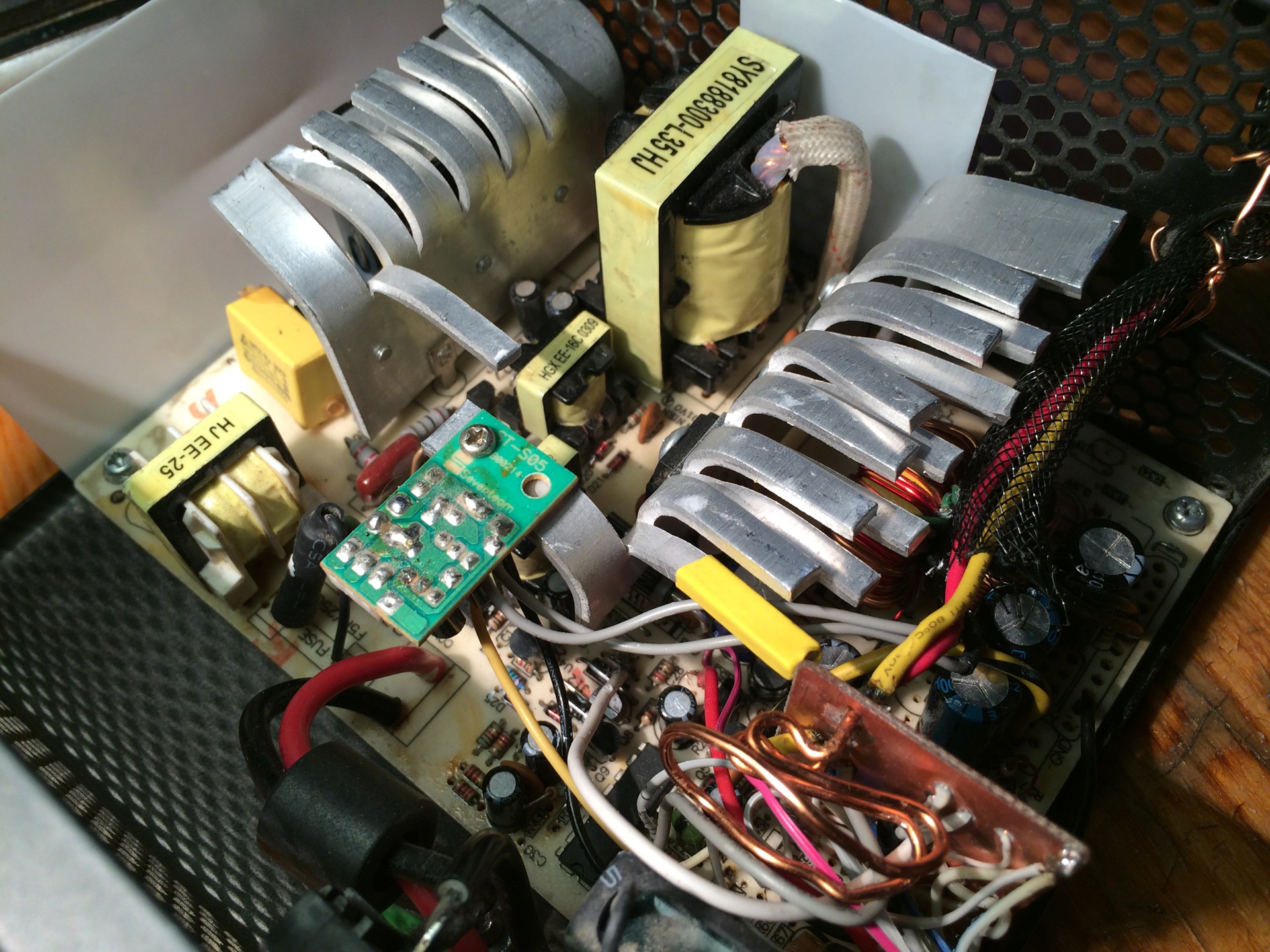
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
Прибор для зарядки постоянным напряжением
Это устройство заряжает аккумулятор постоянным фиксированным напряжением 14 В. По мере зарядки батареи зарядный ток будет падать. Как только напряжение на клеммах батареи достигнет 14 В, ток станет равным нулю, а зарядка прекратится.
Благодаря такому алгоритму аккумуляторную батарею невозможно перезарядить, даже если оставить ее на зарядке на неделю. Это полезно при обслуживании AGM и GEL автомобильных аккумуляторов, которые очень не любят перезарядки.
А теперь за дело, тем более, что схема доработки простая. Дорабатывать будем БП ATX на контроллере TL494 или его аналогах (см. раздел выше). Наша задача – повысить выходное напряжение по шине +12 В до 14 вольт. Сделать это несложно. Вскрываем блок питания, вынимаем плату и отпаиваем все провода питания, оставив лишь желтый, черный и зеленый.

Впаиваем зеленый провод на место любого черного – подаем команду БП на безусловное включение при подключении к сети (см. раздел выше). Выпаиваем электролитические сглаживающие конденсаторы со всех линий питания. На место, где стоял конденсатор по шине +12 В устанавливаем конденсатор той же емкости, но на рабочее напряжение 35 В. Переходим к доработке контроллера. Находим резистор, который соединяет первый вывод микросхемы с шиной +12 В. На схеме ниже он обозначен стрелкой.

Нам нужно сменить его номинал. Но на какой? Выпаиваем, измеряем его сопротивление. В нашем случае его номинал – 27 кОм, но в зависимости от модели БП значение может меняться. На место выпаянного устанавливаем переменный резистор номиналом примерно вдвое большим. Движок резистора устанавливаем в среднее положение.

Включаем блок питания и, измеряя напряжение на шине +12 В (желтый провод относительно черного), вращаем ползунок. Напряжение легко уменьшается, но увеличить его не получается – мешает защита от перенапряжения. Для того чтобы поднять напряжение до необходимых нам 14 В, ее нужно отключить. Находим на схеме резистор и диод, обозначенные на рисунке ниже стрелками, и выпаиваем их.

Снова включаем БП, выставляем напряжение между черным и желтым проводами величиной 14 В. Выключаем, выпаиваем резистор, не трогая его движок, измеряем сопротивление. На место переменного устанавливаем постоянный того же номинала. Устанавливаем на корпус две клеммы, подпаиваем к ним черный и желтый провода, помечаем, где плюс и минус (желтый – плюс, черный – минус).
Снова включаем БП, теперь уже переделанное в зарядку для аккумуляторов устройство. К клеммам подключаем нагрузку – лампу дальнего света автомобиля. Измеряем на клеммах напряжение: если оно не снизилось более чем на 0.2 В, то доработка окончена. Собираем прибор и пользуемся.
Важно! Конечным напряжением зарядки AGM и GEL аккумуляторов является значение 13.8 В, поэтому выходное напряжение имеет смысл снизить с 14 В до 13.8 В.
Единственный, пожалуй, недостаток этой самодельной конструкции – она не имеет защиты от короткого замыкания и переполюсовки (мы ее отключили). Поэтому пользоваться прибором нужно внимательно.
Как сделать зарядное устройство
Теперь займемся переделкой компьютерного блока питания в автомобильное зарядное устройство.
Где 12 вольт, а где 5? Разбираемся с цветовой маркировкой
Как узнать, на каких проводах какие напряжения формируются? Где, к примеру, 12 вольт на блоке питания компьютера? Для этого не понадобится тестер, поскольку все провода, выходящие из компьютерного блока питания, имеют строго определенную общепринятую расцветку. Поэтому вместо тестера мы вооружаемся табличкой, приведенной ниже.
Табличка особых пояснений не требует. С зеленым проводом ( Power on ) мы познакомились в предыдущем разделе – на него материнская плата подает сигнал низким уровнем (замыканием на общий) на включение БП. Синий провод в новых моделях БП может отсутствовать, поскольку производители материнских плат отказались от интерфейса RS-232C (COM-порт), требующего -12 В.
Фиолетовый провод ( +5 VSB ) – это как раз дежурные +5 В, питающие дежурные узлы материнской платы. По серому проводу ( Power good ) блок питания сообщает, что все напряжения в норме и компьютер можно включать. Если какое-то из напряжений в процессе работы выходит за допустимые пределы или пропадает, то сигнал снимается. Причем это происходит до того, как успеют разрядиться накопительные конденсаторы БП, давая процессору время на принятие экстренных мер по аварийной остановке системы. Остальные провода – это провода питания материнской платы и периферийных устройств – дисководов, внешних видеокарт и т. д.

Читайте также: