
Как программировать процессор на с
Что же представляет из себя это устройство?
В простейшем случае программатор это девайс который связывает микроконтроллер и компьютер, позволяя с компа залить файл прошивки в память контроллера. Также нужна прошивающая программа, которая по специальному протоколу загонит данные в микроконтроллер.
Программаторы бывают разные под разные семейства контроллеров существуют свои программаторы. Впрочем, бывают и универсальные. Более того, даже ту же простейшую AVR’ку можно прошить несколькими способами:
Внутрисхемное программирование (ISP)
Самый популярный способ прошивать современные контроллеры. Внутрисхемным данный метод называется потому, что микроконтроллер в этот момент находится в схеме целевого устройства — он может быть даже наглухо туда впаян. Для нужд программатора в этом случае выделяется несколько выводов контроллера (обычно 3..5 в зависимости от контроллера).
К этим выводам подключается прошивающий шнур программатора и происходит заливка прошивки. После чего шнур отключается и контроллер начинает работу.
У AVR прошивка заливается по интерфейсу SPI и для работы программатора нужно четыре линии и питание (достаточно только земли, чтобы уравнять потенциалы земель программатора и устройства):
- MISO — данные идущие от контроллера (Master-Input/Slave-Output)
- MOSI — данные идущие в контроллер (Master-Output/Slave-Input)
- SCK — тактовые импульсы интерфейса SPI
- RESET — сигналом на RESET программатор вводит контроллер в режим программирования
- GND — земля
Сам же разъем внутрисхемного программирования представляет собой всего лишь несколько штырьков. Лишь бы на него было удобно надеть разъем. Конфигурация его может быть любой, как тебе удобней.
Однако все же есть один популярный стандарт:
Для внутрисхемной прошивки контроллеров AVR существует не один десяток разнообразных программаторов. Отличаются они в первую очередь по скорости работы и типу подключения к компьютеру (COM/LPT/USB). А также бывают безмозглыми или со своим управляющим контроллером.
Безмозглые программаторы, как правило, дешевые, очень простые в изготовлении и наладке. Но при этом обычно работают исключительно через архаичные COM или LPT порты. Которые найти в современном компьютере целая проблема. А еще требуют прямого доступа к портам, что уже в Windows XP может быть проблемой. Плюс бывает зависимость от тактовой частоты процессора компьютера.
Так что твой 3ГГЦ-овый десятиядерный монстр может пролететь, как фанера над Парижем.
Идеальный компьютер для работы с такими программаторами это какой-нибудь PIII-800Mhz с Windows98…XP.
Вот очень краткая подборка проверенных лично безмозглых программаторов:
- Программатор Громова.
Простейшая схема, работает через оболочку UniProf(удобнейшая вещь. ), но имеет ряд проблем. В частности тут COM порт используется нетрадиционно и на некоторых материнках может не заработать. А еще на быстрых компах часто не работает. Да, через адаптер USB-COM эта схема работать не будет. По причине извратности подхода :) - STK200
Надежная и дубовая, как кувалда, схема. Работает через LPT порт. Поддерживается многими программами, например avrdude. Требует прямого доступа к порту со стороны операционной системы и наличие LPT порта. - FTBB-PROG.
Очень надежный и быстрый программатор работающий через USB, причем безо всяких извратов. C драйверами под разные операционные системы. И мощной оболочкой avrdude. Недостаток один — содержит редкую и дорогую микросхему FTDI, да в таком мелком корпусе, что запаять ее без меткого глаза, твердой руки и большого опыта пайки весьма сложно. Шаг выводов около 0.3мм. Данный программатор встроен в демоплаты Pinboard
Программаторы с управляющим контроллером лишены многих проблем безмозглых. Они без особых проблем работают через USB. А если собраны на COM порт, то без извращенских методик работы с данными — как честный COM порт. Так что адаптеры COM-USB работают на ура. И детали подобрать можно покрупней, чтобы легче было паять. Но у этих программаторов есть другая проблема — для того чтобы сделать такой программатор нужен другой программатор, чтобы прошить ему управляющий контроллер. Проблема курицы и яйца. Широко получили распространение такие программаторы как:
Внутрисхемное программирование, несмотря на все его удобства, имеет ряд ограничений.
Микроконтроллер должен быть запущен, иначе он не сможет ответить на сигнал программатора. Поэтому если неправильно выставить биты конфигурации (FUSE), например, переключить на внешний кварцевый резонатор, а сам кварц не поставить. То контроллер не сможет запуститься и прошить его внутрисхемно будет уже нельзя. По крайней мере до тех пор пока МК не будет запущен.
Также в битах конфигурации можно отключить режим внутрисхемной прошивки или преваратить вывод RESET в обычный порт ввода-вывода (это справедливо для малых МК, у которых RESET совмещен с портом). Такое действо тоже обрубает программирование по ISP.
Параллельное высоковольтное программирование
Обычно применяется на поточном производстве при массовой (сотни штук) прошивке чипов в программаторе перед запайкой их в устройство.
Параллельное программирование во много раз быстрей последовательного (ISP), но требует подачи на RESET напряжения в 12 вольт. А также для параллельной зашивки требуется уже не 3 линии данных, а восемь + линии управления. Для программирования в этом режиме микроконтроллер вставляется в панельку программатора, а после прошивки переставляется в целевое устройство.
Для радиолюбительской практики он особо не нужен, т.к. ISP программатор решает 99% насущных задач, но тем не менее параллельный программатор может пригодиться. Например, если в результате ошибочных действий были неправильно выставлены FUSE биты и был отрублен режим ISP. Параллельному программатору на настройку FUSE плевать с высокой колокольни. Плюс некоторые старые модели микроконтроллеров могут прошиваться только высоковольтным программатором.
Из параллельных программаторов для AVR на ум приходит только:
- HVProg от ElmChan
- Paraprog
- DerHammer
А также есть универсальные вроде TurboProg 6, BeeProg, ChipProg++, Fiton которые могут прошивать огромное количество разных микроконтроллеров, но и стоят неслабо. Тысяч по 10-15. Нужны в основном только ремонтникам, т.к. когда не знаешь что тебе завтра притащат на ремонт надо быть готовым ко всему.
Прошивка через JTAG
Вообще JTAG это отладочный интерфейс. Он позволяет пошагово выполнять твою программу прям в кристалле. Но с его помощью можно и программу прошить, или FUSE биты вставить. К сожалению JTAG доступен далеко не во всех микроконтроллерах, только в старших моделях в 40ногих микроконтроллерах. Начиная с Atmega16.
Компания AVR продает фирменный комплект JTAG ICEII для работы с микроконтроллерами по JTAG, но стоит он (как и любой профессиональный инструмент) недешево. Около 10-15тыр. Также есть первая модель JTAG ICE. Ее можно легко изготовить самому, а еще она встроена в мою демоплату Pinboard.
 |
Прошивка через Bootloader
Многие микроконтроллеры AVR имеют режим самопрошивки. Т.е. в микроконтроллер изначально, любым указанным выше способом, зашивается спец программка — bootloader. Дальше для перешивки программатор не нужен. Достаточно выполнить сброс микроконтроллера и подать ему специальный сигнал. После чего он входит в режим программирования и через обычный последовательный интерфейс в него заливается прошивка. Подробней описано в статье посвященной бутлоадеру.
Достоинство этого метода еще и в том, что работая через бутлоадер очень сложно закосячить микроконтроллер настолько, что он не будет отвечать вообще. Т.к. настройки FUSE для бутлоадера недоступны.
Бутлоадер также прошит по умолчанию в главный контроллер демоплаты Pinboard чтобы облегчить и обезопасить первые шаги на пути освоения микроконтроллеров.
Pinboard II
Прошивка AVR с помощью демоплаты Pinboard II (для Pinboard 1.1 все похоже)
Спасибо. Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок. Из которых 125000+ было от вас, читателей EasyElectronics. Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто. Сейчас идет заключение договора и подготовка к строительству!
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок.
Регистровый файл
Регистровый файл предоставляет доступ к регистрам. С его помощью нужно получать значения каких то регистров, или изменять их.
В моем случае у меня 64 регистра. В один из регистров записывается результат операции над двумя другими, так что мне нужно предоставить возможность изменять только один, а получать значения из двух других.
Другие
По мимо вышеперечисленных блоков, процессор должен уметь:
- Получать и изменять значения в памяти
- Выполнять условные переходы
Тут и там можно увидеть как это выглядит в коде.
После написания процессора нам нужна программа, которая бы преобразовывала текстовые команды в машинный код, чтобы не делать этого вручную. Поэтому нужно написать ассемблер.
Я решил реализовать его на языке программирования Си.
Так как мой процессор имеет RISC архитектуру, то для того, чтобы упростить себе жизнь, я решил спроектировать ассемблер так, чтобы в него можно было легко добавлять свои псевдоинструкции(комбинации из нескольких элементарных инструкций или из других псевдоинструкций).
Можно реализовать это с помощью структуры данных, хранящей в себе тип инструкции, ее формат, указатель на функцию, которая возвращает машинные коды инструкции, и ее название.
Обычная программа начинается с объявления сегмента.
Для нас достаточно двух сегментов .text — в котором будет храниться исходный код наших программ — и .data — в котором будет хранится наши данные и константы.
Инструкция может выглядеть вот так:
Сначала указывается название инструкции, потом операнды.
В .data же указываются объявления данных.
Объявление должно начинаться с точки и названия типа данных, после же идут константы или аргументы.
Удобно парсить (сканировать) ассемблер файл в таком виде:
- Сначала сканируем сегмент
- Если это .data сегмент, то мы парсим разные типы данных или .text сегмент
- Если это .text сегмент, то мы парсим команды или .data сегмент
Для работы ассемблеру нужно проходить исходный файл 2 раза. В первый раз он считает по каким смещениям находятся ссылки (они служат для), они обычно выглядят вот так:
А во второй проход можно уже и генерировать файл.
В дальнейшем, можно запускать выходной файл из ассемблера на нашем процессоре и оценивать результат.
Также готовый ассемблер можно использовать в Си компиляторе. Но это уже позже.
Пару дней назад я опубликовал и потом внезапно убрал в черновики статью о плане написать про создание своей ОС для архитектуры ARM. Я сделал это, потому что получил много интересных отзывов как на Хабре, так и в G+.
Сегодня я попробую подойти к вопросу с другой стороны, я буду рассказывать о том, как программировать микроконтроллеры ARM на нарастающих по сложности примерах, пока мы не напишем свою ОС или пока мне не надоест. А может, мы перепрыгнем на ковыряние в Contiki, TinyOS, ChibiOS или FreeRTOS, кто знает, их там столько много разных и интересных (а у TinyOS еще и свой язык программирования!).
Небольшой экскурс в архитектуру
ARM продвигает замечательную архитектуру, которую успешно лицензирует, мне на самом деле сложно представить, в каком устройстве нет никакого присутствия продуктов этой компании. В вашем смартфоне гарантированно есть несколько ядер на базе архитектуры ARM. Еще парочка найдется в современном ноутбуке (и это даже не CPU, а так, сопутствующий контроллер какой-либо периферии), еще несколько – в автомобиле. Есть они и в других бытовых вещах: микроволновках и телевизорах.
Такая гибкость достигается тем, что в самом базовом варианте ядро ARM очень простое. Сейчас существуют три разновидности этой архитектуры. Application применяется в устройствах «общего назначения» – как основной процессор в смартфоне или нетбуке. Этот профиль самый навороченный функционально, тут есть и полноценный MMU (модуль управления памятью), возможность аппаратно выполнять инструкции Java bytecode и даже поддержка DRM-схем. Microcontroller – это полная противоположность профилю application, применяемая (внезапно!) для использования в микроконтроллерах. Тут актуально минимальное энергопотребление и детерминистическое поведение. И, наконец, real-time используется как эволюция профиля microcontroller для задач, где критично иметь гарантированное время отклика. Все эти профили получили реализацию в одном или нескольких ядрах Cortex, так, например, Cortex-A9 основан на профиле application и является частью процессора в iPhone 4S, а Cortex-M0 основан на профиле microcontroller.
Железки!
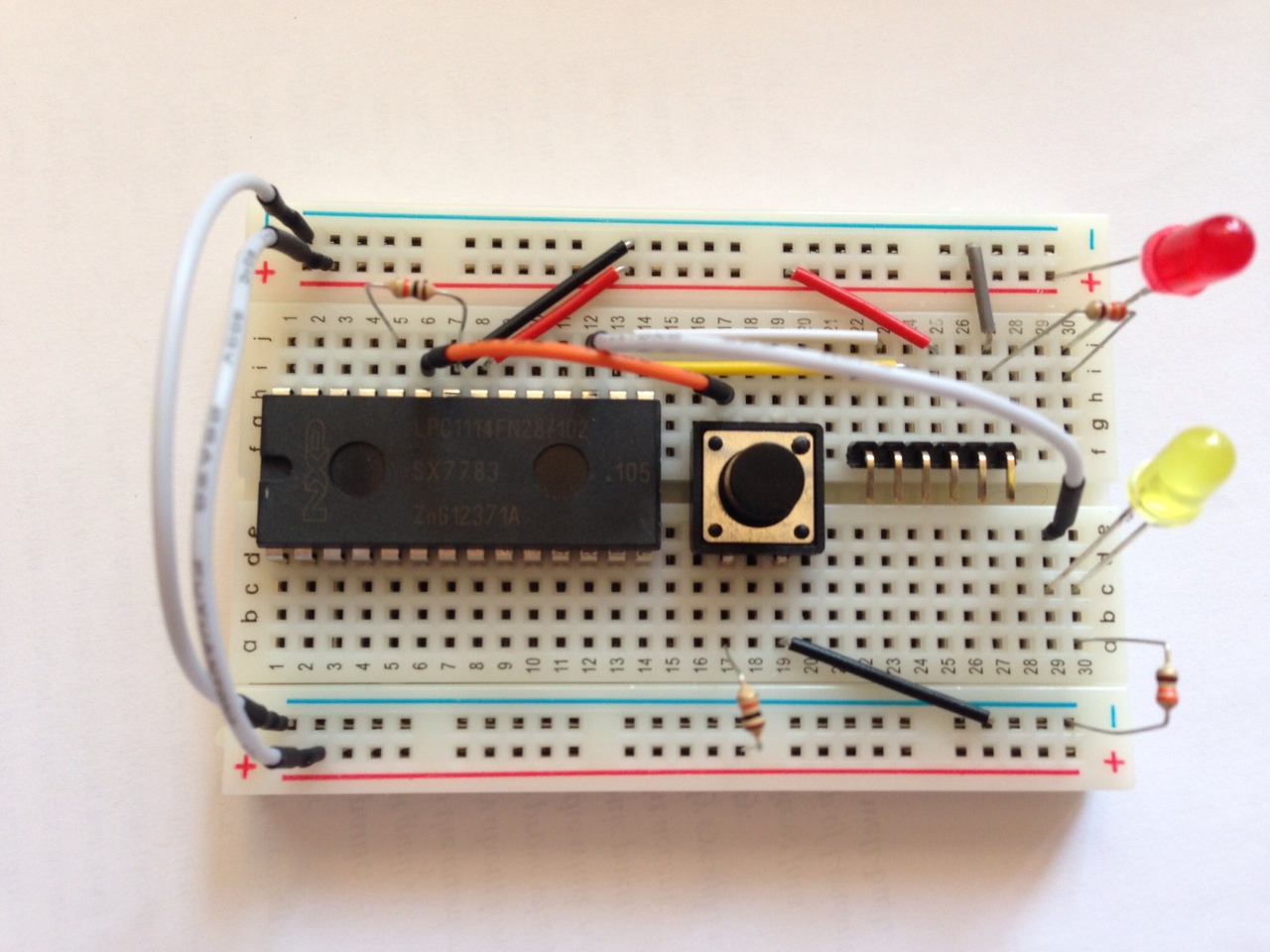
В качестве целевой платформы мы будем рассматривать работу с Cortex-M, так как она самая простая, соответственно, надо вникать в меньшее количество вопросов. В качестве тестовых устройств я предлагаю вам LPC1114 – MCU производства NXP, схему на котором можно собрать буквально на коленке (нет, правда, вам нужен только сам MCU, FTDI-кабель на 3,3 В, несколько светодиодов и резисторов). LPC1114 построен на базе Cortex-M0, так что это будет самый урезанный вариант платформы.
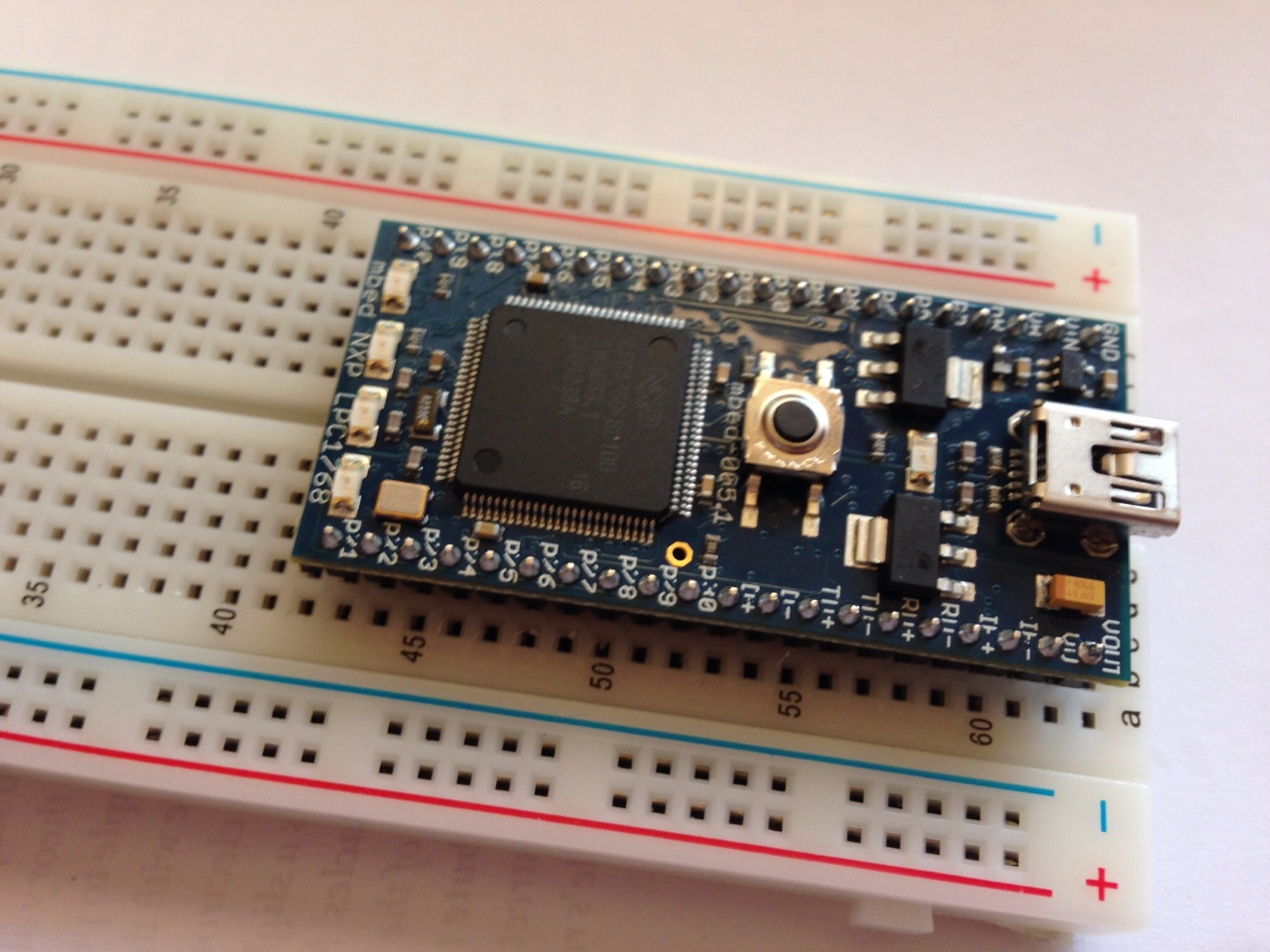
В качестве альтернативного варианта мы будем работать с платформой mbed, а конкретно, с моделью на базе LPC1768 (а значит, внутри там Cortex-M3, несколько более навороченный). Вариант уже не настолько бюджетный, но процесс заливки бинарников на чип и отладки упрощен максимально. Да и можно поиграться с самой платформой mbed (вкратце: это онлайн-IDE и библиотека, с помощью которой можно программить на уровне ардуины).
Приступим
Интересной особенностью современных ARM-ов является то, что их вполне реально программировать целиком на С, без применения ассемблерных вставок (хотя ассемблер не так уж и сложен, у Cortex-M0 всего 56 команд). Хотя некоторые команды в принципе не доступны из С, эту проблему решает CMSIS – Cortex Microcontroller Software Interface Standard. Это драйвер для процессора, который решает все основные задачи управления им.
Как же загружается процессор? Типична ситуация, когда он просто начинает выполнять команды с адреса 0x00000000. В нашем случае процессор несколько более умный, и рассчитывает на специально определенный формат данных в начале памяти, а именно – таблицу векторов прерываний:

Старт выполнения программы происходит следующим образом: процессор читает значение по адресу 0x00000000 и записывает его в SP (SP – регистр, который указывает на вершину стека), после чего читает значение по адресу 0x00000004 и записывает его в PC (PC – регистр, который указывает на текущую инструкцию + 4 байта). Таким образом начинает выполняться какой-то код пользователя, при этом у нас уже есть стек, указывающий куда-то в память (т.е., все условия для выполнения программы на С).
В качестве тестового упражнения мы будем мигать светодиодом. На mbed у нас их целых четыре, в схему с LPC1114 (далее — «доска») мы устанавливаем светодиод вручную.
Перед тем как непосредственно писать код, нам надо выяснить еще одну вещь, а именно – что где должно располагаться в памяти. Поскольку мы не работаем с какой-то «стандартной» ОС, то компилятор (вернее, компоновщик) не может узнать, где у него должен быть стек, где сам код, а где — куча. К счастью для нас, у семейства ядер Cortex стандартизированная карта памяти, что позволяет относительно просто портировать приложения между разными процессорами этой архитектуры. Работа с периферией, конечно, остается процессорозависимой.
Карта памяти для Cortex-M0 выглядит вот так:

У Cortex-M3 она, по сути, такая же, но несколько более детальна. Проблема тут в том, что у NXP есть свой, отдельный взгляд на этот вопрос, так что проверяем карту памяти в документации на процессор:

На самом деле, SRAM у нас начинается с 0x10000000! Вот так, одни стандарты, другие стандарты, а все равно надо тома документации листать.
Вооружившись этими знаниями, идем писать код. Для начала – таблица прерываний:
Сохраним эту таблицу в boot.s . Тут, фактически, только одна ассемблерная вставка – функция hang, которая устраивает процессору бесконечный цикл. Все прерывания, кроме reset, указывают на нее, так что в случае непредвиденной ситуации процессор просто зависнет, а не пойдет выполнять непонятный участок кода.
Сама таблица должна бы быть длиннее, но на самом деле мы могли бы закончить ее еще после вектора Reset, остальные у нас не сработали бы в этом примере. Но, на всякий случай, мы заполнили таблицу почти целиком (кроме пользовательских прерываний).
Теперь напишем реализацию функции main:
У mbed первый светодиод подключен к порту GPIO 1.18, на доске мы подключили светодиод к GPIO 1.8. Одни и те же пины могут выполнять разные функции, эти по умолчанию работают именно как GPIO (General Purpose I/O – линии ввода/вывода общего назначения).
Код относительно прямолинеен, если держать под рукой LPC-шный User manual (один и второй). Для начала мы указываем режим работы GPIO через регистр GPIO_DIR_REG (у наших процессоров они в разных местах, да и вообще LPC1768 может работать с GPIO более эффективно), где 1 – вывод, 0 – ввод. Потом мы запускаем бесконечный цикл, в котором пишем в порт попеременно значения 0 и 1 (0 В и 3,3 В соответственно).
Функция для «паузы» у нас работает наугад, просто прокручивая относительно долгий цикл ( volatile int не дает компилятору выоптимизировать этот цикл целиком).
Наконец, все это нужно правильно скомпоновать:
Сценарий компоновщика объясняет ему, где у нас флеш, где оперативная память, какие у них размеры (тут используются размеры для LPC1114, так как у LPC1768 всего больше, сдвиги, к счастью, идентичны). После определения карты памяти мы указываем, какие сегменты куда копировать, .text (код программы) попадает в флеш, .bss (статические переменные, которых у нас пока нет) – в память. Помимо этого мы задаем два символа, которые использовали в boot.s: _stack_base – указывает на вершину стека и _boot_checksum (спасибо Zuy за уточнение!) – записывает чексумму загрузчика. Чексумма рассчитывается по формуле: дополнительный код (2's compliment) от суммы полей выше (т.е. адреса стека, и всех прерываний до непосредственно чексуммы). Хотя утилиты для прошивки (см. далее) сами исправили бы чексумму на правильную, если бы мы прошивали бы код из самого приложения, то загрузиться снова мы бы уже не смогли.
Теперь у нас есть три файла: boot.s, main.c, mem.ld, пора это все скомпилировать и, наконец, запустить. В качестве тулчейна мы будем использовать GCC, позже, возможно, я покажу как делать то же с LLVM. Пользователям OS X я советую взять тулчейн у Linaro – в самом конце списка: Bare-Metal GCC ARM Embedded. Пользователям других ОС я советую взять тулчейн там же :-) (разве что гентушникам будет проще сэмержить crossdev и скомпилить GCC).
Интересный момент тут — это отключение использования всех стандартных библиотек у GCC. Действительно, весь код, который попадет в итоговый бинарник – это код, который написали мы сами.
Вопрос: как компоновщик знает, куда надо засунуть таблицу прерываний? А он и не знает, там не написано :-). Он просто линкует подряд, начиная с нулевого адреса, так что порядок файлов (boot.o, потом main-c0.o) очень важен! Попробуйте слинковать наоборот или слинковать boot.o два раза и сравните вывод в lst-файле.
Хорошая идея – посмотреть на итоговый листинг (файл lst) или закинуть бинарник в дизассемблер. Даже если вы не говорите на ARM UAL, то чисто визуально можно проверить, что хотя бы таблица прерываний находится на своем месте:


Еще можно обратить внимание на забавный момент – GCC при компиляции под Cortex-M3 генерирует функцию wait() больше, чем в варианте под Cortex-M0. Правда, если включить оптимизацию то она вправит ему мозги.
Мигаем!
Все что нам осталось – залить бинарники на наши тестовые платформы. С mbed тут все максимально просто, просто скопируйте blink-c3.bin на виртуальную флешку и нажмите reset (на mbed). С доской все немного сложнее. Во-первых, для того, чтобы попасть в загрузчик, нам нужен резистор между GND и GPIO 0.1. Во-вторых, необходима программа для непосредственно прошивки. Можно использовать Flash Magic (Win, OS X), можно использовать консольную утилиту – lpc21isp:
- ставим резистор между j5 и j7 (10 кОм подойдет);
- нажимаем reset;
- запускаем lpc21isp;
- снимаем резистор;
- нажимаем reset еще раз – запускается приложение.
Если у вас есть возможность запустить примеры на разных устройствах, вы заметите, что скорость мигания на них не идентична. Это связанно с тем, что у разных устройств разная частота ядра, соответственно, wait() они выполняют за разное время. В следующей части мы изучим вопросы осцилляции детальнее и сделаем четкий отсчет времени.
P.S. Отдельное спасибо хабраюзеру pfactum за то, что тратит время на исправление моих ошибок в тексте :-).
P.P.S. Просьба тем, у кого есть тестовая платформа на базе ARM – пишите в комментариях – какая. Я могу пересмотреть аппаратную базу для дальнейших статей.
В этой статье будут рассмотрены основные сведение о языке С, структура программы на языке С, дано понятие о функциях, операторах и комментариях данного языка программирования.

Программирование микроконтроллеров AVR фирмы Atmel

1. Микроконтроллеры - первый шаг
Эта статья, как и все последующие, — маленький шажок в мир микроконтроллеров. И таких «шажков» у нас будет много, пока не дойдем до того момента, когда сможем сказать: «Микроконтроллер — последний шаг». Но и это, скорее всего, из области фантастики — нельзя объять необъятное, — мир микроконтроллеров постоянно развивается и совершенствуется. Наша задача — сделать первый шаг, логическим итогом которого должна стать первая, самостоятельно разработанная и собранная конструкция на микроконтроллере.

2. Системы счисления: десятичная, двоичная и шестнадцатиричная
Как вы наверняка знаете, существует много разных систем счисления, одними пользуются и сейчас (наша, родная, десятичная система; римская система, известная нам как «римские цифры»), другие остались в глубоком прошлом (системы счисления инков и майя, древнеегипитская система, вавилонская).
Тут, я думаю, вопросов у нас нет, что такое системы счисления нам понятно — отображение чисел символами. А вот какая связь систем счисления с микроконтроллерами.

3. Логические операции, логические выражения, логические элементы
Все современные цифровые технологии основываются на логических операциях, без них никуда не деться. Все цифровые микросхемы в своей работе используют логические схемы (выполняют логические операции, в том числе и микроконтроллер).
Создавая программу, мы прописываем все действия микроконтроллера основываясь на своей логике с применением логических операций, иногда даже и не подозревая об этом, которые применяем к логическим выражениям.

4. Битовые операции
В прошлой статье была рассмотрена тема логических операций и выражений. В этой статье мы рассмотрим логические битовые операции. Битовые операции очень близки к логическим операциям, можно даже сказать, что это одно и тоже. Разница только в том,что логические операции применяются к высказываниям, а битовые операции, с такими же правилами и результатами применяются к битам.

5. Прямой, обратный и дополнительный коды двоичного числа
Прямой, обратный и дополнительный коды двоичного числа — способы представления двоичных чисел с фиксированной запятой в компьютерной (микроконтроллерной) арифметике, предназначенные для записи отрицательных и неотрицательных чисел

6. USBASP программатор для микроконтроллеров AVR - идеальное решение для начинающих, и не только
Сегодня мы рассмотрим как, без особых затрат и быстро, запрограммировать любой микроконтроллер AVR поддерживающий режим последовательного программирования (интерфейс ISP) через USB-порт компьютера. В качестве программатора мы будем использовать очень простой и популярный программатор USBASP, а в качестве программы — AVRdude_Prog V3.3, которая предназначена для программирования МК AVR.

7. Программа AVRDUDE_PROG: программирование микроконтроллеров AVR ATmega и ATtiny
Популярнейшая программа AVRDUDE_PROG 3.3 предназначена для программирования микроконтроллеров AVR ATmega и ATtiny

8. Основы программирования микроконтроллеров AVR
С этой статьи мы начнем конкретно заниматься одним вопросом — программирование микроконтроллеров. Процесс будет проходить следующим образом — сначала статья по устройству микроконтроллера (к примеру, первая статья будет по портам ввода-вывода), а затем статья по программированию. Сегодняшний наш разговор вводный, и будет посвящен вопросам материального и программного обеспечения процесса изучения основ программирования микроконтроллеров.

9. Русификация программы Atmel Studio
В этой статье мы поговорим о проблемах русификации программы Atmel Studio, как перевести программу на русский (или другой) язык, и как сделать более удобной работу программы с программатором USBASP. После установки программы Atmel Studio весь интерфейс будет на английском языке. Кому-то, кто знаком с английским, или уже привык работать с программами с английским интерфейсом, это вполне устроит. Меня лично, такой подход создателей программы к великому и могучему не устраивает, мне более комфортно работать с русскими меню.
10. Введение в язык программирования С (Си) для микроконтроллеров
В этой статье будут рассмотрены основные сведение о языке С, структура программы на языке С, дано понятие о функциях, операторах и комментариях данного языка программирования.

11. Переменные и константы в языке С (Си) для микроконтроллеров AVR
В этой статье будут рассмотрены типы переменных в языке С (Си) для микроконтроллеров AVR, объявление переменных, способы задания констант, будет дан обзор арифметических операций языка С, присваивания, инкремента и декремента.
В этой статье будет рассмотрено управление портами микроконтроллеров AVR на языке программирования С (Си): установка выводов порта на вход или выход, считывание значений на входах портов, программа для управления миганием светодиода.

13. Циклы в языке С (Си) для микроконтроллеров AVR
В данной статье будут рассмотрены циклы в языке программирования Си для микроконтроллеров AVR. Будут рассмотрены циклы типа «для» (for) и циклы типа «пока» (while), будет показано как осуществить принудительное прерывание цикла и организовать бесконечный цикл.

14. Массивы в программировании микроконтроллеров AVR
В данной статье мы рассмотрим основы использования массивов в языке С для микроконтроллеров AVR и рассмотрим их практическое применение в программе для изменения цифр на семисегментном индикаторе.
Декодер
Декодер это тот блок, который отвечает за декодирование инструкций. Он указывает какие операции нужно выполнить АЛУ и другим блокам.
Например, инструкция addi должна сложить значение регистра $zero(Он всегда хранит 0) и 20 и положить результат в регистр $t0.
На этом этапе декодер определяет, что эта инструкция:
- Immediate type
- Должна записать результат в регистр
И передает эти сведения следующим блокам.
После управление переходит в АЛУ. В нем обычно выполняются все математические, логические операции, а также операции сравнения чисел.
То есть, если рассмотреть ту же инструкцию addi, то на этом этапе происходит сложение 0 и 20.
Операторы
Как правило, тело функции в языке Си представляет собой набор операторов, в конце каждого из которых стоит точка с запятой ;. Можно размещать каждый оператор на своей строке или несколько операторов на одной строке – компилятору это неважно, главное чтобы они разделялись точкой с запятой (этот символ свидетельствует о конце оператора). Но для восприятия человеком, конечно, удобнее чтобы каждый оператор располагался на отдельной строке. Допускается использование и пустых строк чтобы визуально отделить структурные элементы программы.
Операторы выполняются последовательно в том порядке, в котором они записаны. Но структура программы не обязательно должна быть линейной – при наличии циклов и условий возможны пропуски выполнения отдельных операторов (условия) или многократное выполнение одних и тех же операторов (циклы).
Назначение основных элементов программы на языке C (Си)
89 thoughts on “AVR. Учебный курс. Трактат о программаторах”
А что это делает в учебном курсе? чего не на главной странице?
Здарова, Артем, вот я и зашел, чего то не мог зайти долго…
Я постепенно правлю и переписываю старые статьи, чтобы привести их в более стройный и завершенный вид.
Здравствуйте! В этой статье я расскажу какие шаги нужно пройти для создания простого процессора и окружения для него.
Для начала нужно определиться с тем, каким будет процессор. Важны такие параметры как:
- Размер машинного слова и регистров(разрядность/"битность" процессора)
- Машинные команды (инструкции) и их размер
Архитектуры процессоров можно разделить по размеру инструкций на 2 вида (на самом деле их больше, но другие варианты менее популярны):
Основное их отличие в том, что RISC процессоры имеют одинаковый размер инструкций. Их инструкции простые и выполняются сравнительно быстро, тогда как CISC процессоры могут иметь разный размер инструкций, некоторые из которых могут выполняться достаточно продолжительное время.
Я решил сделать RISC процессор во многом похожий на MIPS.
Я это сделал по целому ряду причин:
- Довольно просто создать прототип такого процессора.
- Вся сложность такого вида процессоров перекладывается на такие программы как ассемблер и/или компилятор.
Вот основные характеристики моего процессора:
- Машинное слово и размер регистров — 32 бита
- 64 регистра (включая счетчик команд)
- 2 типа инструкций
Register type(досл. Регистровый тип) выглядит вот так:

Особенность таких инструкций заключается в том, что они оперируют с тремя регистрами.
Immediate type(досл. Немедленный тип):

Инструкции этого типа оперируют с двумя регистрами и числом.
OP — это номер инструкции, которую нужно выполнить (или же для указания, что эта инструкция Register type).
R0, R1, R2 — это номера регистров, которые служат операндами для инструкции.
Func — это дополнительное поле, которое служит для указания вида Register type инструкций.
Imm — это поле куда записывается то значение, которое мы хотим явно предоставить инструкции в качестве операнда.
Полный список инструкций можно посмотреть в github репозитории.
Вот лишь пару из них:
NOR это Register type инструкция, которая делает логическое ИЛИ НЕ на регистрах r1 и r2, после записывает результат в регистр r0.
Для того, чтобы использовать эту инструкцию нужно изменить поле OP на 0000 и поле Func на 0000000111 в двоичной системе счисления.
LW это Immediate type инструкция, которая загружает значение памяти по адресу r1 + n в регистр r0.
Для того, чтобы использовать эту инструкцию в свою очередь нужно изменить поле OP на 0111, а в поле IMM записать число n.
После создания ISA можно приступить к написанию процессора.
Для этого нам нужно знание какого нибудь языка описания оборудования. Вот некоторые из них:
- Verilog
- VHDL (не путать с предыдущим!)
Я выбрал Verilog, т.к. программирование на нем было частью моего учебного курса в университете.
Для написания процессора нужно понимать логику его работы:
- Получение инструкции по адресу Счетчика команд (PC) инструкции
- Выполнение инструкции
- Прибавление к Cчетчику команды размера выполненной инструкции
И так до бесконечности.
Получается нужно создать несколько модулей:
Разберем по отдельности каждый модуль.
Комментарии
Комментарии - это примечания, помогающие понять смысл программы. В языке Си текст комментариев записывается между значками /* */ . То, что написано между этими значками, компилятору совершенно неважно – он все это игнорирует. Это важно только для человека, который анализирует текст программы.
Комментарии можно размещать как на одной строке с операторами, так и на разных (обычно ниже или выше строки с оператором). Комментарии могут занимать несколько строк и для них не обязательно наличие в конце точки с запятой.
Наличие комментариев считается хорошим стилем программирования поскольку позволяет лучше понимать смысл программы не только ее автору (особенно по прошествии некоторого времени, в течение которого он над ней не работал), но и другим людям, которые в дальнейшем будут работать с этой программой.
Внутри комментариев нельзя использовать символы, определяющие начало и конец комментариев. К примеру, неправильная запись внутри комментария:
/* комментарии к программе /* управления электродвигателем */ */
/* комментарии к программе управления */ электродвигателем */
Язык Си для микроконтроллеров AVR поддерживает и другой метод записи комментариев - строка, начинающаяся с символов //. К примеру
// Это комментарий в одну строку
В качестве итога можно отметить, что для написания хорошо читаемой программы целесообразно придерживаться следующих правил:
Микроконтроллер – микросхема, предназначенная для управления электронными устройствами, или по другому – простенький компьютер (микро-ЭВМ), способный выполнять несложные задачи.

Рано или поздно, любой радиолюбитель (я так думаю), приходит к мысли о применении в своих разработках микроконтроллеров. Микроконтроллер позволяет существенно "облегчить" радиолюбительскую конструкцию, сделать ее проще и намного функциональнее.
Что нужно для того, чтобы начать пользоваться всеми возможностями микроконтроллеров? Я считаю, что не так уж и много. Главное в этом деле - желание. Будет желание, будет и результат.
В этом разделе (и в разделе "Устройство AVR") сайта я постараюсь помочь начинающим "микроконтроллерщикам" сделать первый, он же самый трудный шаг навстречу микроконтроллерам - попробуем разобраться в устройстве и программировании микроконтроллеров AVR семейства ATtiny и ATmega.
В сети существует множество сайтов затрагивающих так или иначе "микроконтроллерную" тематику, много также и различной литературы для начинающих. Поэтому я не собираюсь "переплюнуть" всех и вся и создать очередной шедевр мыслительных мук в виде пособия по микроконтроллерам для начинающих. Я постараюсь систематизировать, собрать в кучу все нужное на мой взгляд, для первого шага в мир микроконтроллеров, и изложить более-менее доступным языком.
В своих статьях я буду опираться на материалы из публикаций популярных авторов микроконтроллерной тематики: Рюмика С.М., Белова А.В., Ревича Ю.В., Евстифеева А.В., Гребнева В.В., Мортона Д., Трамперта В., Фрунзе А.В. и Фрунзе А.А. (и многих других), а также материалы радиолюбительских сайтов. Ну и, может быть, немного своих "умных мыслей".
Функции
По сути программа на языке С представляет собой набор функций, каждая из которых может вызывать для выполнения любые другие функции. Функций в программе может быть много, но обязательной является только одна из них, называемая "main" ("главная"). Выполнение программы на языке С начинается всегда с нее. Программист не может изменить название главной функции "main", но названия для всех других функций программы он может выбирать произвольно.
Функции в языке С легко узнать по их отличительному признаку – круглым скобкам после их имени. В общем случае в скобках содержится набор параметров, которые могут передаваться в функцию для ее работы, а также набор переменных, через которые функция может передавать результаты ее работы во внешнюю функцию (которая ее вызвала). Если скобки пустые, как например, в представленном примере с функцией main(), то это значит что у функции нет ни входных, ни выходных параметров.
Идущая следом за названием функции фигурная скобка отмечает начало последовательности операторов, образующих тело функции. Закрывающая фигурная скобка > отмечает конец этой последовательности операторов. На этой скобке выполнение функции завершается.
Фигурные скобки также используются для того, чтобы объединить несколько операторов программы в составной оператор или блок.
Общие сведения о языке C (Си)
В настоящие дни C (Си) является многофункциональным языком программирования высокого уровня, подобным таким языкам как Pascal или Python, но в отличие от них он имеет возможность работы с командами низкого уровня, подобно языку ассемблера. Программу на языке С можно скомпилировать в машинный код практически для любого известного микропроцессора. Не исключением стали и микроконтроллеры – сейчас по популярности использования (особенно для начинающих) язык Си обогнал в них доминировавший до этого язык ассемблера. Программирование на языке С поддерживает и самая популярная в настоящее время программная платформа Atmel Studio (. ) для микроконтроллеров семейства AVR.
Сейчас уже можно с уверенностью сказать, что язык С стал своеобразным фундаментом, на котором строится все современное программирование – чего стоят хотя бы "Visual C" и "C Sharp". Основанные на нем языки программирования сейчас занимают доминирующее положение в мире программирования. А все началось с удачной структуры языка, разработанной в 1972 г. Деннисом Ритчи.
Файлы программ на языке Си имеют расширение .C, а простейшая структура программы выглядит следующим образом.
int main (void) /* главная функция: начало программы */
оператор программы;
оператор программы;
.
оператор программы;
> /* закрывающая скобка в конце программы */
Комментарии являются необязательным элементом программы, но они крайне желательны для лучшего понимания ее сути.
Заголовки
История создания языка C (Си)
Язык программирования C (Си) появился "стихийно" – ни одна компания не заказывала создания подобного языка. Его первая версия появилась на свет в 1972 г. в фирме Bell Laboratories, написал ее теперь уже всемирно известный программист Деннис Ритчи (Dennis MacAlistair Ritchie).
Ритчи рассчитывал, что созданный им язык программирования будет востребован в операционной системе UNIX, которая тогда была еще новинкой. Конечно, создавать новый язык Ритчи помогали и другие его коллеги программисты, но именно он внес наибольший вклад в становление этого языка. К новому языку первоначально не выдвигалось никаких требований, перед ним не ставилось никаких задач, фактически он возник как результат дружеского соревнования между небольшим кругом программистов.

Название C (Си) появилось так же стихийно, как и сам язык. Фактически, он стал преемником ранее созданного языка В (Би), разработанного автором операционной системы UNIX Кеном Томпсоном. В свою очередь, язык Би во многом был похож на языке BCPL, разработанный в Кембриджском университете. А язык BCPL основывался на идеях "старого как мир" Алгола-60.
Первым неформальным стандартом языка Си стало издание в 1978 г. книги Брайана Кернигана и Денниса Ритчи с названием "The 'C' Programming Language". Первоначально книга была издана в США, но потом была переведена и многократно переиздавалась во многих других странах мира. В 1989 г. язык Си был стандартизован ANSI (American National Standards Institute – американский национальный институт стандартов) и ISO (International Standard Organization - международная организация по стандартизации).
Но время шло и у пользователей языка Си появилась потребность в реализации новых функций, не поддерживавшихся языком. Учитывая все это, Бьерн Страуструп в начале 80-х (работавший все в той же самой Bell Laboratories) принял решение о расширении возможностей языка Си, который первоначально назвали как "Си с классами". Но в дальнейшем за его модификацией языка закрепилось другое название - Си++. Это название сохранилось за ним вплоть до настоящего времени.

Читайте также: