
Как подключить шаговый двигатель с 4 выводами к блоку питания
У меня много различной оргтехники, которая вышла из строя. Выбрасывать я её не решаюсь, а вдруг пригодится. Из её частей возможно сделать что-нибудь полезное.
К примеру: шаговый двигатель, который так распространен, обычно используется самодельщиками как мини генератор для фонарика или ещё чего. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Оно и понятно: для управления шаговым двигателем нужна электроника. Его просто так к напряжению не подключишь.
И как оказалось - я ошибался. Шаговый двигатель от принтера или ещё от какого устройства, довольно просто запустить от переменного тока.
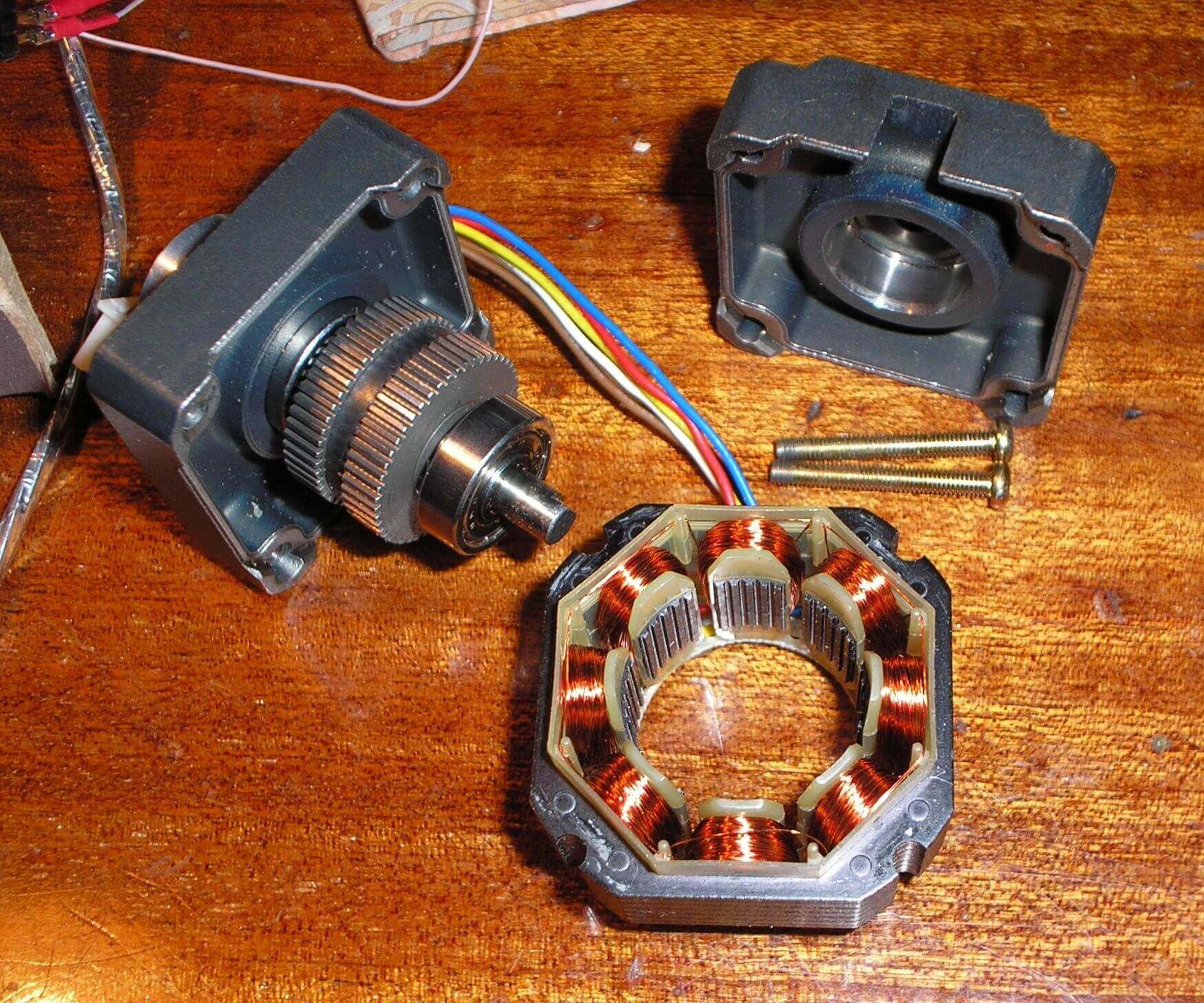
Я взял вот такой двигатель.
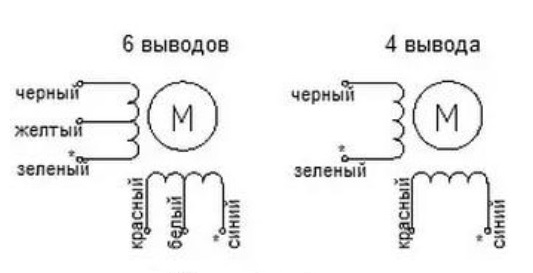
Обычно у них четыре вывода, две обмотки. В большинстве случаем, но есть и другие конечно. Я рассмотрю самый ходовой.
Особенности управления и программного обеспечения контроллеров
Управлять регуляторам предельно просто. Когда активен сигнал “Вкл”, аппарат вращается, а когда не активен, то стоит. Когда движок трудится, то кнопки + и — поменяют вращательную скорость. При каждом нажатии на + скорость увеличивается на 1 шажок, а если нажать на -, то это скорость снизит. Если удерживать эти кнопки без отрыва, то вращательная скорость будет либо плавно уменьшаться, либо плавно увеличиваться.
Когда двигатель остановлен, при нажатии на + будет задан ритм вращения в прямое направление. А если нажать -, то это переведет его в реверсивное вращение. Чтобы выбрать режим, нужно в момент подачи питания на датчик удерживать кнопку на протяжении ½ секунды — постоянно. Тогда управление изменится.
Низкопороговый транзистор поможет создать драйвер, у которого более высокие параметры. Применяться в драйверах могут транзисторы, обладающие следующими преимуществами:
- напряжение до 50 В;
- энергию транзистора до 4 А;
- сопротивление транзистора в открытом воздухе не более ½ Ом;
- на одном корпусе размещают два транзистора.
На биполярном транзисторе таких параметров достичь попросту невозможно. Сопротивление обмоток постоянного электричества измеряется, а напряжение придется искать в справочных данных. Но это только в том случае, когда разговор идет об обычном драйвере, не имеющем никакого отношения к сложной форме и силе напряжения. Обычно такой ритм применяют при большой скорости вращения.
Конструкция и принцип функционирования
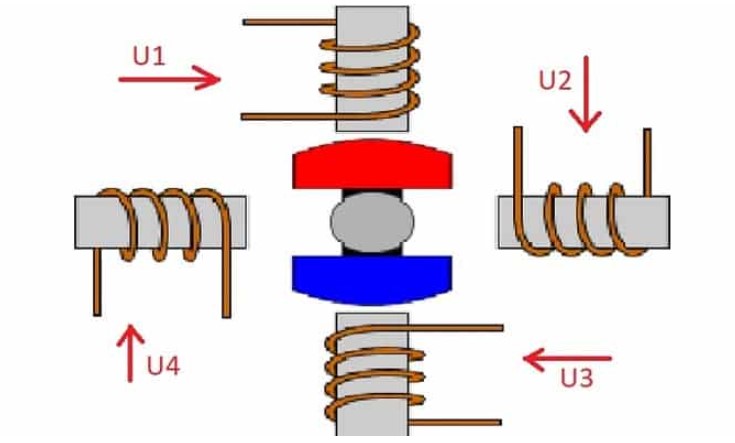
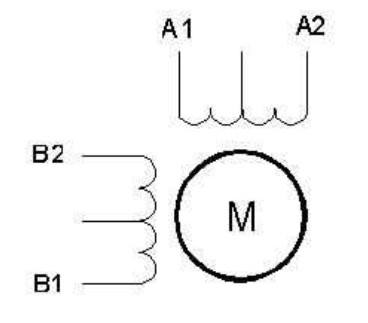
Ниже на рисунке вы видите схему общей компоновки электрического двигателя шагового типа. Первое, что замечается – это 4 обмотки, относящиеся к моторному статору, расположение их позволяет им находиться по отношению друг к другу под прямым углом. Исходя из этого, можно смело говорить о том, что машина имеет шаг размером в 90 градусов.
Когда осуществляется подача напряжения типа U1 на первую обмотку, ротор начинает перемещаться опять же на 90 градусов. Когда же реализуется подача напряжения поочередным способом на остальные обмотки U2, U3, U4, то вал продолжает вращаться, до окончательного завершения полного круга. Дальше цикл повторяется заново по аналогичному алгоритму.
Для того, чтобы изменить направленность оборотов мотора, достаточно просто поменять порядок подачи импульсов на определенные медные намотки.
Особенности блока управления униполярного двигателя
Прежде всего реализуют режим «fixed time off”, затем происходит аппаратная ШИМ регулировка ограничения мощности фазы, используется способ удержания, если отсутствует сигнал STEP больше, чем две секунды (когда указан номинал около 30%). Широкий диапазон напряжения и электричества фаз (зависит от силовых частей регуляторов). Используют универсальные управляющие сигналы ENABLE, DIR, STEP.
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
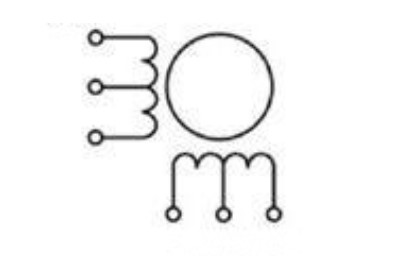
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.

Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.

Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Шаговые электродвигатели являются одними из распространенных моделей на отечественном рынке. Это обусловливается преимуществами, которые обеспечивает данный мотор, а также относительной простотой эксплуатации. Чем же интересны агрегаты на 4 вывода? Рассмотрим далее с нашей сегодняшней статье.

Шаговый электрический двигатель – машина, основное назначение которой – преобразовывать электрическую энергию, поступающую от сети питания в энергию для механического движения. Конструкция имеет ряд своих особенностей, о которых мы расскажем далее, но, в целом компоновка включает стандартные детали. Среди них стоит выделить статор, его обмотки, а также ротор (магнитомягкий или магнитотвердый).
Ключевой параметр силового агрегата данного типа – обеспечение вращения дискретного типа, показатель которого равен точному количеству заданных импульсов. Последнему показателю соответствует в свою очередь количество осуществляемых шагов.
Чаще всего применение шагового мотора с 4 выводами имеет место в обрабатывающих станках с ЧПУ, роботизированном оборудовании, приборах для хранения, считывания и обработки информации.
Вывод
Подключить ШД на 6 выводов – задача несложная, главное – подобрать подходящие драйверы и соблюдать правила схемы электрического подключения.
Польза шаговых двигателей
Иногда ШД скапливаются в большом количестве, а времени, чтобы ими заняться, просто нет. Но ведь ШД являются очень интересными и полезными. Особенно это касается радиолюбителей, которые их запускают. Для проверки аппаратов приходится собирать контроллеры.
ШД получили широкое распространение в тех устройствах, в которых нужно, чтобы механизмы перемещались точно. Разновидностей управляющих устройств много, но наиболее простыми в качестве управления — это двухфазные униполярные движки. Они обладают двумя независимыми обмотками и выводы от середины. Устанавливают их в ксероксы, дисководы и принтеры.
Что на сегодняшний день определяется при помощи управляющих блоков:
- Опробование работы двигателя в полушаговых режимах.
- Определение одного из двух алгоритмов работы мотора.
- Опробование работы в полношаговых режимах.
- Определение количества шажков.
Существует программа по управлению шаговыми моторами. В нее входит целых 5 подпрограмм, переключаемых одной кнопкой. Номер программы, которая выбирается, будет отображаться 3 светодиодами в двоичных системах исчисления. Когда произойдет первое включение, то загорится светодиод, который свидетельствует о том, что уже работает первая подпрограмма ШД в полушажковом режиме. Мотор запускается двумя кнопками: левее и правее. Все зависит от того, в какую сторону должен вращаться движок. Но направление зависит и от коммутации обмотки движка.

Иногда приходится идти на эксперименты. На панели виртуального осциллографа видна импульсная последовательность и коды полушага работы мотора. Именно поэтому некоторые шаговики не работают.
Типичные схемы
Исходя из того, какое количество выводов имеет мотор, отличаются возможности применения определенных схем подключения. 4 фазы, 5 или 6 – каждая модификация обладает своими особенностями. В нашей сегодняшней статье нас интересует подсоединение шагового двигателя на 4 провода, остальные вариации мы рассмотрим в других описаниях.
Каждая схема подразумевает наличие группы выходных клемм, которые собственно и отвечают за формирование рабочих режимов и способов подачи напряжения питания. Учитывая конкретную схему, стоит применять определенные для каждой ситуации выводы двигателя.
Всего существует 6 ключевых схем для соединения мотора:
- принципиальная;
- биполярная;
- биполярная, с реализованным отводом и центральной обмоточной частью;
- униполярная, с реализованными четырьмя фазами и возможностью присоединения пары намоток;
- 4-х фазный униполярный способ с подключением параллельного типа;
- с последовательным присоединением.
В ситуациях, когда запитка ключевых полюсов шагового агрегата осуществляется от одного и того же драйвера, по примененным схемам можно выделить основные особенности работы, отличающие каждую конкретную схему. К этим параметрам относят:
- выводы обязательно подключаются к соответствующим клеммам прибора. Когда соединение последовательное, то индуктивность обмоток возрастает, параллельно снижается ток;
- обеспечение паспортных значений электрических параметров. Параллельная схема увеличивает уровни тока и снижает индуктивность;
- при реализации соединения по одной фазе на каждую намотку, происходит снижение момента при работе на низких оборотах, вместе со снижением величин токов;
- осуществление всех электрических и динамических параметров, в полном соответствии с паспортными характеристиками. Относятся к этим значениям и номинальные токи. Благодаря этому, существенно упрощается управленческая схема;
- выдача на порядок большего крутящего момента, возможность применения с большим диапазоном частот вращения;
- увеличение момента вращения, но, для оборудования, работающего на низких частотах вращения.
Общие параметры
Шаговый двигатель представляет собой силовой агрегат бесколлекторного типа, вращения ротора которого осуществляются дискретным способом, то есть шагами. Это – ключевая отличительная черта устройств, заметно выделяющая их среди других популярных моделей.
Полное вращение якоря включает в себя несколько шагов. При изменении формы сигнала, числа импульсов, а также их продолжительности и фазового сдвига, параллельно меняются направленность оборотов и точное число вращений ротора.
Статор мотора включает магниты, роторные же части взаимодействуют с магнитными элементами, изготавливаются из разнотипных материалов:
- магнитомягких – для реактивных двигателей;
- магнитотвердых – для моторов с постоянными магнитами.
Разновидности моторов
Шаговые моторы на 6 выводов, как и другие версии таких агрегатов, классифицируются на такие категории:
- с постоянными магнитами. Они оборудованы роторами, конструкция которых подразумевает наличие магнитов постоянного действия. Детали взаимодействуют со статорными электромагнитами, тем самым создавая крутящий момент;
- реактивный мотор. Также часто их называют шаговыми двигателями с переменным магнитным сопротивлением. Ротор не подразумевает наличия постоянных магнитов, компонент изготовлен из магнитомягкого материала в форме звезды;
- гибридный. В конструкции этого мотора с 6 выводами реализованы технические особенности двух вышеописанных версий. Ротор как в первом случае, изготавливается из магнитотвердых материалов, но, внешне имеет вид звезды. Количество шагов в одном обороте напрямую определяется числом постоянных магнитов на роторной звезде. 1 вращение может иметь до 400 шагов (то есть 1 шаг – приблизительно 0,9˚).
Сильные и слабые стороны
Осуществив правильное подключение шагового силового агрегата на 4 вывода, вы довольно быстро оцените все преимущества конструкции:
- показатель угла поворота полностью соответствует количеству поданных электрических импульсов. После торможения, обороты сохраняют максимальный момент и фиксацию;
- точность позиционирования. Показатель обеспечивает установленный шаг в доле 3 – 5%, с возможностью накопления;
- высокая скорость старта, обратного вращения (реверса), остановки;
- отсутствие контактных компонентов для съема тока, обеспечивает высокую надежность, ведь детали не трутся и, следовательно – не изнашиваются;
- нет необходимости в обратной связи для обеспечения позиционирования;
- возможность работы на низких оборотах для нагрузки, подведенной напрямую. При этом не применяются редукторы;
- относительно меньшая цена;
- широкий спектр управления скоростью валовых вращений, благодаря изменениям частот электроимпульсов.
Недостатков на порядок меньше, справедливости ради укажем и их. К слабым сторонам относятся:
- возможность возникновения «эффекта резонанса» и дальнейшего проскальзывания шагового мотора при работе;
- отсутствие обратной связи может вызвать потерю контроля над двигателем;
- энергия расходуется на стабильном уровне, независимо от наличия на агрегате нагрузки;
- особенности схем вызывают затруднения в их реализации и дальнейшей поддержке работоспособности.
Драйверы
Неотъемлемый компонент для подключения шагового мотора на 6 проводов – драйвер. Эти приспособления классифицируются на 2 основные категории:
- копирующие форму исходящих сигналов. В процессе эксплуатации данные приборы самостоятельно не генерируют сигналы, а только дублируют их форму, с целью обеспечения управления двигателем. За создание импульсов отвечают микроконтроллерные элементы, такие как Ардуино. Самый популярный пример такого драйвера – Motor Shiled в основе которого лежит плата L298;
- формирующие сигналы. Более функциональные драйверы, использование которых позволяет обходиться без микроконтроллеров. Для работы необходимо всего задать прямоугольный сигнал и подобрать подходящий рабочий режим. Модель – А4988.
На базе L298N
Драйвер мостового типа разработан для эффективного регулирования двигателей с номинальным током до 2 ампер и напряжением питания до 46 вольт. Модуль, изготовленный на основе L298N включает такие детали:
- непосредственно микросхему аналогичного типа;
- механизм охлаждения;
- стабилизатор уровня напряжения;
- защитные диоды;
- колодки клеммов;
- разъемы для присоединения приемников сигналов.
При любой смене в конфигурации перемычек нужен перезапуск блока управления
Контроллеры тестируются с униполярными движками. Нагреваются последние в пределе рабочего времени, блок управления нагревается минимально при подаваемом напряжении 40 В и токе 2,5 А. Только радиаторы для силовых частей рекомендованы (их размеры зависят от того, насколько мощный движок). Максимальной частоте следования сигнала STEP является всего 65 кГц.
Когда проводилось тестирование с подобными параметрами и двигатели получали максимальную скорость 1500 оборотов за минуту на протяжении десяти минут, на данных аппаратах тестирование происходило при энергии 6 А.
Печатные платы блоков управления разводят в двусторонних вариантах. Силовые транзисторы и стабилизаторы монтируют на платы с нижней стороны печатных плат, чтобы было удобно крепить радиаторы. При этом обязательно изолировать транзисторы посредством теплопроводящих прокладок от радиаторов. И транзисторы должны иметь двойной запас подаваемого напряжения на силовые части.
Когда используют мощные ШД, необходимо уделять много внимания блокам питания, чтобы те могли выдержать импульсные нагрузки и обладать небольшой выходной индуктивностью, а также сопротивлением. Запитку на силовую часть подают лишь затем, как было подано напряжение в 12 В. Если подать питание одновременно и на логику, и на силовую часть, то придется устанавливать резисторы на массу.
- вводится контроль за пропуском шажков — получается, когда частота сигнала STEP превысит скорость, с которой обрабатываются шажки контроллеров, а при этом на выводе регулятора установят значение, равное единице, то после этого устанавливают перемычку, обозначенную на схеме в виде “удержания”, затем работа будет заблокирована и двигатель обесточится;
- вводится режим, защищающий от сбоя питания — если регулятор заглючил, то через ½ секунды он обесточит движок с периодичностью в 1 секунду;
- чтобы не прибегать к использованию варианта, где энергия пониженная в режиме удержания просто не следует впаивать резисторы.
Когда включается блок управления на ½ секунды, то на выводе будет установлена работа всего одной части и заблокирована. Затем контроллер будет работать в штатном режиме.
Ограничение тока фаз
У большинства драйверов получается понизить напряжение фазы, которые протекает по обмотке оборудования. Чтобы выбрать напряжение фазы, нужно обязательно воспользоваться инструкцией к драйверу. В таблице всегда указывают действующие токи. Чем они выше, тем выше сила двигателя. Чрезмерное напряжение будет приводить к тому, что движок перегреется и сломается, слишком небольшой приведет к пропуску шагов или отсутствию стабильного вращения ротора. Если имеется потенциометр, то именно он выполняет ограничение тока по драйверам поворотным способом.
Постоянный ток, который проходит сквозь обмотку оборудования, является напряжением удержания — они удерживают движок в состоянии недвижимости. Понижение энергии удержания добиваются при помощи драйверов. Если снизить это напряжение, то это приведет к понижению нагревания движка во время удержания.
За что отвечают управляющие сигналы STEP, ENABLE и DIR:
- вход драйверов DIR — предназначаются для того, чтобы выбрать направление вращения движка;
- вход драйверов STEP — нужны для того, чтобы получить тактовые импульсы, а один импульс ротора движка будет поворачиваться на один микрошаг (работают либо по спаду импульса, либо по фронту), чем выше скорость вращения ротора, тем выше частота импульсов;
- вход драйверов ENABLE — именно они разрешат работу двигателя (у большинства драйверов данные являются инверсными, а действие агрегата разрешается в том случае, если нет напряжения на входе. У некоторых двигателей не могут действовать драйвера, тогда его обмотка электрическим образом будет отключена и вал движка не удержится.
Прежде чем начнет движение вал, нужно разрешить работу движка и выбрать направление движения. затем выполняют движение подачи импульса. Все импульсы поворачивают ротор ровно на один микрошаг.
Драйвера
Для того, чтобы эффективно включить и запустить 4-х жильный двигатель, необходимо применять драйвера. О них мы уже писали ранее, а сейчас давайте вкратце рассмотрим их особенности. Приборы работают в биполярном режиме, что обусловливает такие основные преимущества:
- увеличение показателя момента вращения на уровень до 40%, если сравнивать с униполярными модификациями;
- разнообразие в использовании моторов разных конфигураций обмотки фаз.
Из недостатков биполярного режима работы стоит выделить разве что сложность технической реализации самого драйвера для агрегата с 4 выводами. Каждую обмотку стоит отдельно подсоединять к источнику питания, отключать. Здесь лучше всего устанавливать мост-схему с 4 ключами. Рассмотрим же самые функциональные варианты драйверов, которые мы уже упоминали выше.
Микро шаги
У большинства драйверов получается делить полные шаги движка на микро шаги. Выбирают микро шаги согласно таблицы, указанной в инструкции к драйверам. В ней всегда указано, сколько микрошагов на полный шаг и каково количество тактов на полные обороты валов.
Когда для того, чтобы целый поворот ротора движка в ракурсе он повернулся на полный шаг, нужно 180 тактов, то при варианте четыре микрошага на 1 шаг понадобится уже 720 тактов. Следовательно, чем больше микрошагов в шагах, тем более точным и плавным будет поворот ротора шагового движка. А чтобы поддерживать ту же скорость, нужно не забывать учитывать частоты тактового импульса.
Сморите видео

В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Подключение шаговых двигателей
Конструкции силовых агрегатов данного типа бывают разные, каждый из которых следует учитывать при выборе конкретной схемы. Для того, чтобы произвести запитывание обмоток, требуется устройство, способное выдавать импульс управляющего типа или даже их серию, в четко заданной последовательности. Для этого в большинстве приложений используют приборы полупроводникового действия, для присоединения мотора шагового типа. Известны эти детали как микропроцессорные драйверы. Каждый из них обладает своими клеммами, определяющих методы питания и рабочие режимы.
Исходя из применяемой схемы подключения, необходимо применять выводы шагового устройства, которые также представлены различными модификациями. Используя отдельно каждый из вариантов подсоединения разнотипных клемм к сигналу выходного типа, вы получаете в результате определенный показатель скорости вращения, шаг или даже микрошаг перемещений в рабочей плоскости. Это довольно удобно, ведь для решения одного типа задач требуется низкая частота, для других – высокая. Один и тот же силовой агрегат имеет возможность задавать требуемую характеристику посредством драйвера. В процессе используется гибкий кабель, обеспечивающий универсальность создаваемого соединения.
Подключение
Как подключить шаговый мотор на 6 контактов, чтобы он работал со всеми своими возможностями? Осуществить это достаточно просто, главное – знать все тонкости процесса и точно следовать требованиям и рекомендациям.
Прежде всего, нужно запитать намотки, при помощи полупроводникового прибора. Главная его задача – выдавать импульсы управления в заданной последовательности. Также нередко устанавливаются драйверы – детали, о которых мы расскажем чуть позже. Они обладают определенным набором клемм, каждая из которых отвечает за обеспечение режима работы и способа электропитания
Аналогично с моделями четырехконтактного типа, двигатели на 6 проводов обладают парой кабелей для каждой отдельной намотки. Из особенностей выделим наличие центрального вывода для каждой отдельной катушки. Это позволяет осуществлять подключение мотора в одном из двух применений:
- в качестве однополярного силового агрегата;
- биполярного.
Перед началом подключения необходимо разделить провода электроподключения на 3 класса, замкнутые между собой. Осуществить это проще всего и эффективнее, с помощью тестера. Далее, после разделения, следует обнаружить центральные выводы. Необходимо использовать сразу все 6 проводов, если нужно подсоединить электрический двигатель к драйверу однополярного типа.
Соединение же с биполярным драйвером требует уже применения всего одного разъема провода с единственным выводом и имеющегося центрального выхода, для отдельной совместимости с каждой намоткой.
Конструктивные особенности подключения агрегатов с 6 выходами по большей части совпадают с параметрами пятиконтактных моделей. Основное отличие – внутренняя закрытость центральных выводов, и, как следствие – соединение в 1 провод. Благодаря этому, электродвигатель может работать только при помощи однополярного механизма. Определение намоток здесь происходит почти интуитивно, прежде всего, лучше идентифицировать центральный ввод, ведь уровень его сопротивления является половиной от аналогичных показателей других кабельных соединений.
Пример подключения
Рассмотрим же практическое подключение 6-ти выводного двигателя к сети, на примере имеющейся модели. Возьмем двигатель NEMA 23 57HM56-2006 униполярной конструкции. Модель имеет ток 2 ампера, из-за чего обыкновенный драйвер для такого типа шаговых двигателей А4998 не будет полезен. Можно его заменить на более функциональную версию ШД ТА 6600 с управленческой платой MKS CD 57/86, для более стабильного подключения.
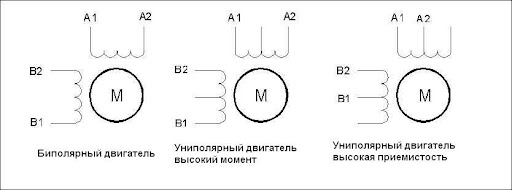
Биполярный мотор обладает одной обмоткой на каждой фазе, которая в процессе работы меняет свою полюсность при помощи драйвера. Необходимо устанавливать драйвер мостового типа, или же полумостовой, но с питанием двухполярного типа.
При реализации биполярного двигателя, мы будем иметь две намотки и уже четыре вывода. Если проводить параллель между биполярным и униполярным моторами, то первый обладает на порядок большей удельной мощностью. При условии одних и тех же габаритных размеров, биполярные моторы в процессе эксплуатации выдают больший крутящий момент. Вот пример двух мод ификаций :
Униполярный двигатель можно подсоединить к драйверу и, не используя центральные выводы в катушках – белый и желтый. Таким образом получится обеспечить высокий момент вращения.
Принципиальная схема
Схематически данный вариант присоединения выглядит так :
Чтобы обеспечить бесперебойную работу шагового электродвигателя, необходимо знать все нюансы передачи номинальных напряжений, скорости крутящего момента, а также о снижении уровней линейного напряжения.
Реализуется также подключение силового агрегат к Ардуино. Здесь все выходы управления с драйвера совмещаются с цифровыми контактами Arduino Uno.
Схема шагового двигателя
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно

Особенности функционирования
Если сравнивать моторы данного вида с другими типоразмерами, стоит отметить, что детали шаговых моторов совершают обороты пошагово, а не непрерывно. Каждый отдельный шаг является определенной частью каждого полного оборота. Точное число требуемых шагов для полноценного оборота вала будет отличаться в каждой отдельной ситуации. Особенность зависит схемы соединения, марки силового агрегата, способа управления мотором.
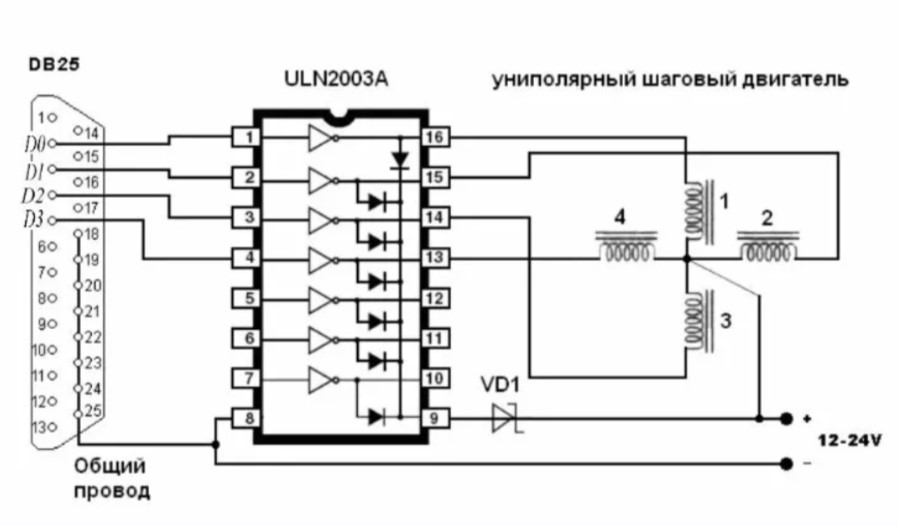
ULN2003
Доступность и низкая стоимость реализации – основные параметры, определяющие распространенность данных устройств регулирования. Справедливости ради отметим, что выходят они из строя чаще, чем вышеописанные модификации, но, при этом, легко подлежа восстановлению.
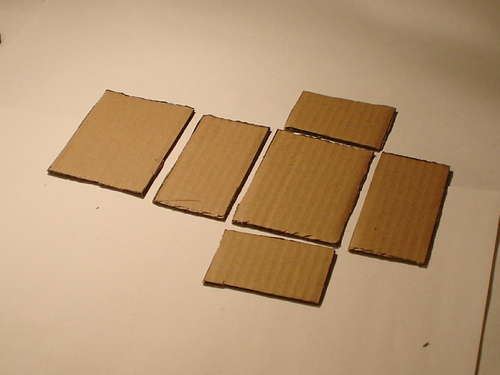
Изготавливаем корпус
Завершающим этапом является изготовление корпуса. Можно запросто изготовить его из вторичного сырья. Ведь автономный контроллер все равно самодельный. Все зависит от размера корпуса и размера платы. Также придется оставить довольно места для проводов. Берем картонную коробку и вырезаем у нее стенки. Нам понадобится два прямоугольника размером 7 на 10 сантиметров. И еще пара 5 на 11 сантиметров. Вырезаем 2 отверстия под разъемы. На этих же стенках обводят контуры цилиндрических гнезд для запитки постоянных электричеством.
Оба отверстия следует вырезать по контурам. Обводятся контуры разъемов параллельных портов. Дальнейшие действия зависят от того, происходила ли припайка к проводам мотора разъемов. В случае положительного ответа их придется закрепить снаружи. Если ответ отрицательный, то достаточно будет проткнуть в стене пять отверстий под провода. С помощью клеевых пистолетов просто соединить каждую из стенок. При желании корпус раскрашивается.
Внутри корпуса все компоненты приклеиваются. Только придется убедиться, что на разъемах предельно большое количество клея, так как именно они подвергаются нагрузке. Для того, чтобы коробок был закрытым, его необходимо обеспечить защелками. Для этого вырезаются из пенопласта ушки, полоски и квадратики, приклеиваются уши к сторонам корпусов. Поверх коробки клеятся полоски — корпус готов.
Способы определения обмотки шаговых двигателей при отсутствии справочных данных
Если рассматривать униполярные агрегаты с пятью и шестью выводами, то средний из них определяют после измерения сопротивления обмотки. Между 2 фазами оно будет в 2 раза выше, чем между фазой и средним выводом. Их подключают к + источника запитки. Затем берется абсолютно любой из фазных выводов, который назначают фазой. Остается восемь коммутаций выводов. Их перебирают.
При учете того, что обмотка фазы обладает другим средним приводом, то количество вариантов снижается. Если попутно обматывать фазы, то это не приведет к поломке драйверов или агрегатов — они будут дребезжать и не крутиться. Но не стоит забывать, что именно к этому эффекту приведет чрезмерно высокая скорость вращения. Получается, что ее следует заведомо установить ниже предельной.
Как изготовить контроллер для шаговых двигателей из подручных средств своими руками
Для этой манипуляции, выполненной своими ручками, вам будут нужны шаговый мотор, микросхема, два стальных прутка, коробка из картона для корпуса. Из инструментов нужны краски, ножницы, клеевый пистолет, все для пайки, кусачки. Для самого контроллера понадобится стержень с резьбой, провод, разъем, гайка с разными шайбами, цилиндрическое гнездо. Управляют устройством компьютером, а не руками.
- Сначала необходимо взять детали от старенького сканера. Для построения собственного ЧПУ контроллеры сперва извлекают из сканера шаговый мотор и управляющую плату. Все сканеры выглядят по-разному. Достаточно избавиться от стекла и выкрутить винты. Помимо мотора и платы достаточно взять еще несколько металлических стержней — именно они нужны для того, чтобы выполнить тестирование мотора.
- Теперь извлекается микросхема из платы управления. Если ее найти не удалось, тогда можно просто купить. Если же она имеется, тогда выпаиваем. Это действие под силу лишь умельцам, но ничего сложного нет. Сперва отсосом удаляют припой, затем осторожно просовывают отвертку под микросхему. Но делать это необходимо осторожно — паяльником лишь слегка касаться каждого выхода. При этом нажим производится на отвертку легонько.
- Приступаем к пайке. Необходимо припаять микросхему на плату макета, припаяв к плате каждый из выводов микросхемы. Потом необходимо выполнить соединение вывода второго коннектора параллельного порта с выводом. Также поступают с другими коннекторами — их соединяют с выводами. После этого параллельный порт припаяют к отрицательной шине питания. В конце припаивают движок. Даже если с первого раза не получится, ничего страшного — рано или поздно вас постигнет удача.
- Достаточно припаять провода таким образом, чтобы после на них зацеплять крокодилы. В конце припаивают черный провод к положительной шине электро запитки на плате макета цилиндрического гнезда для запитки постоянной запитки. Во избежания отламывания проводов, их можно закрепить при помощи клеевого пистолета.
- В последнюю очередь устанавливают программное обеспечение. Его можно скачать на просторах интернета, распаковать и записать на диск. После скачивания идет настройка. Затем ПК придется перезагрузить и переходить к работе в МС-ДОС.
Данный самодельный контроллер вполне может использоваться в качестве ЧПУ устройства — плоттера или любой другой вещи, которая нуждается в точном управлении движением. Не забываем о настройках.
Виды драйверов
Вкратце расскажем о типах деталей ШД с 4 выводами, которых всего есть 2:
- которые повторяют формы сигналов. В процессе своей работы они не формируют импульсы, лишь только повторяют их для обеспечения эффективного управления. Генерированию сигналов – это специализация микроконтроллеров. Как раз к таким драйверам и относится чип L298;
- формирующие сигналы. Их установка сводит к минимуму необходимость в применении микроконтроллеров, ведь достаточно просто задать периодический прямоугольный сигнал (меандр) и подобрать оптимальный рабочий режим. А 4988 – один из примеров такого драйвера.
Общие сведения о шаговых двигателях
Речь идет о бесколлекторных агрегатах, роторы которого вращаются не плавно, а дискретно. В одном обороте ротора определенное количество шагов. Количество шагов всегда указано в тех.документах двигателя. К примеру, роторы шаговых движков за 1 полный шаг могут повернуться почти на 2 градуса Получается, что для поворота ротора на 360 градусов движок обязан совершить около 180 полных шагов.
Ардуино
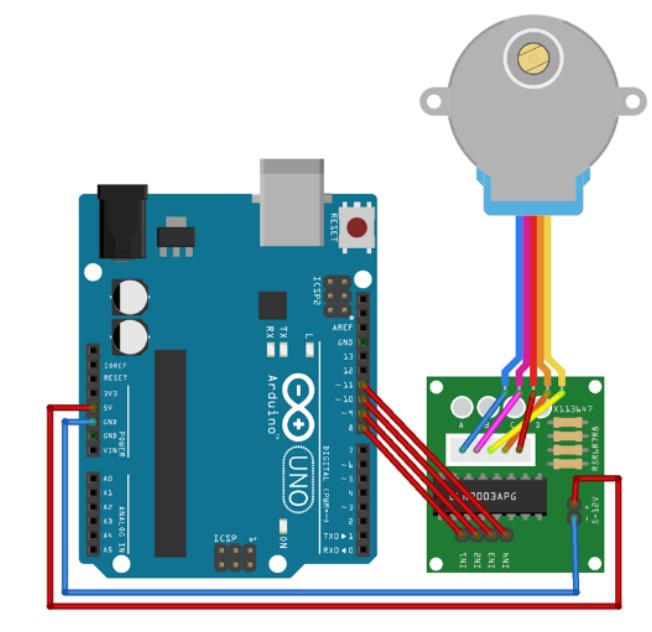
Для упрощения восприятия, давайте рассмотрим данный вопрос на примере конкретной модели мотора, пускай это будет 28BYj-48. Двигатель представляет собой униполярный агрегат, который мы совместим с драйверами L298 и ULN2003. Схематически это выглядит так (L298):
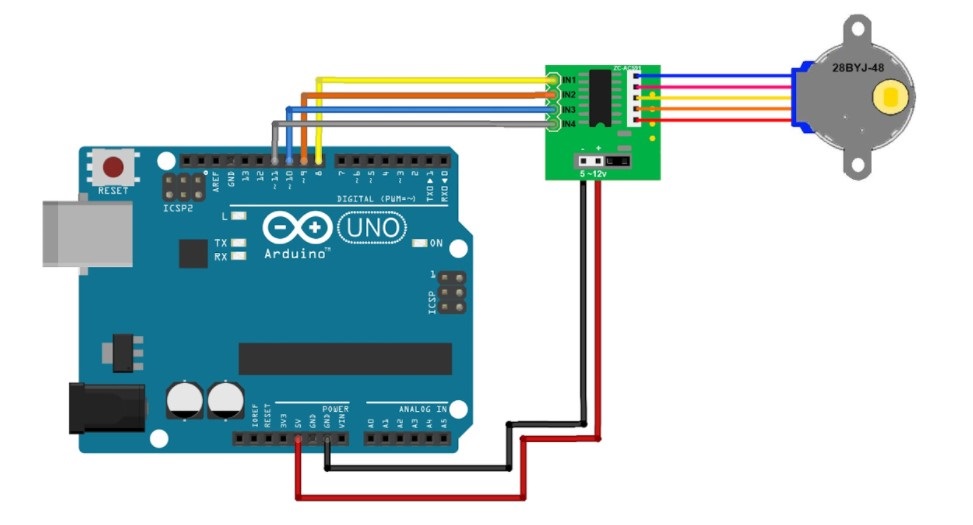
Для драйвера ULN2003 схема выглядит следующим образом :
Модельный ряд
Сейчас давайте рассмотрим функциональные компоненты, которые поддаются подключению по вышеописанным схемам.
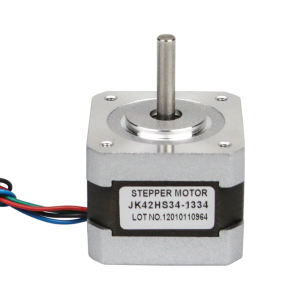
Nema 17 JK42HS34-1334-01 – мотор, поставляемый с проводами, обладает шагом 1,8 градусов. Исходя из этого, 1 полный оборот составляет 200 шагов. Основные технические параметры:
- 2 фазы;
- уровень номинального напряжения х 2,8 В;
- фазовое сопротивление – 2,1 Ом;
- 22 мм – длина вала;
- 2,5 мГн – индуктивность каждой фазы.
Nema 23 – более совершенная версия шагового мотора, шаг аналогичный предыдущей модели – 1,8˚. Номинальный ток – 2 ампера, диапазон рабочих температур: -20 — +85 градусов. Комплектуется проводом, длина которого – 80 см. Уровень сопротивления фазы – 2,6 Ом., напряжение – 5,2 вольта.

NEMA 34 – одна из самых функциональных серий таких моторов, как и любые другие линейки, включает несколько функциональных моделей и подходящих уникальных комплектующих. В некоторых модификациях реализованы энкодеры, и другие вспомогательные компоненты. Модель 86BYGH1182 к примеру, относится к биполярному типу, имеет 2 обмотки и 4 вывода. Устанавливается на принтерах, станках ЧПУ и другом пром. оборудовании.
Подключение драйверов для шагового двигателя всегда было интересным мероприятием. В этом вопросе не обойтись без контроллеров шаговых двигателей, которые приобретают зачастую на aliexpress ru для программного обеспечения и управления контроллером.

Несмотря на тот факт, что у контроллеров шаговых двигателей очень простая схема и они стоят недорого, как и комплектующие для них, контроллеры способны обеспечить очень обширные функциональные возможности и высокие характеристики. У них 2 способа для управления шаговым двигателем, также они призваны обеспечивать регулировку скорости вращения двигателя в расширенных пределах. КШД имеет несколько вариантов схем, чтобы управлять и биполярными, и униполярными моторами. Призваны обеспечивать вращение в реверсивном и прямом направлении. Задает параметры с режимами, управлять конт — ом можно при помощи кнопок.
У контролеров нет защиты от короткого замыкания на обмотке агрегата. Только из-за реализации этих функций схема значительно усложняется, замыкания происходят крайне редко. Во время механической остановки валов шагового двигателя при вращении не вызываются опасные токи, драйвера в защите не нуждаются.
Возможность запуска шагового мотора без помощи электроники
Все люди, обладающие большим количеством оргтехники, вышедшей из строя, не хотят от нее избавляться. Мало ли что может случиться — она может и пригодиться. Ведь всегда есть возможность сделать из нее что-то действительно стоящее. Например, шаговый мотор с дисплеем. Ведь именно они получили широкое распространение в последнее время. Они используются самоделкиными в качестве мини-генераторов для фонариков или других вещей. Только вот как мотор, преобразующий электрическую энергию в механическую — такое встретишь нечасто. Ясное дело, чтобы управлять шаговым двигателем необходима электроника. Запросто к напряжению его не подсоединишь.
Как выяснилось, это ошибочное мнение. Шаговые движки от принтеров или других устройств очень просто запускаются от переменных токов. Чаще всего они имеют 4 вывода и 2 обмотки. Чтобы запустить агрегат, понадобится конденсатор, источник переменного электричества. Необходимо замкнуть последовательно обмотки. А середины проводов следует скрутить и запаять. После подключения конденсатора 1 вывод будет посередине обмотки, а второй вывод на источнике питания к любому выходу. По факту конденсаторы будут параллельны обмоткам.
После подачи питания движок завертится. Если перебросить выводы конденсаторов с одного питания на другое, то валы движка станут вращаться в обратную сторону. Все проще простого. И принцип работы тоже простой — конденсаторы формируют сдвиги фаз на обмотках, в итоге обмотки будут работать по очереди и шаговый мотор завертится.
К сожалению обороты мотора не получится отрегулировать. При увеличении или уменьшении питающего напряжения ничего не изменится, потому что обороты задает частота сети. В конкретном случае применяют конденсаторы постоянных токов, но это не всегда верно. Лучше взять конденсаторы постоянных вращений. Они могут быть и самодельными.
Подключение электрического шагового двигателя на 6 выводов имеет свои технические особенности, которые стоит учитывать при осуществлении монтажа. Правильно реализованные соединения обеспечат продуктивность и надежность работы мотора, управления производственным оборудованием.

Шаровые электродвигатели довольно часто используются в отечественной промышленной отрасли, что обусловливается высокими эксплуатационными показателями агрегатов. В процессе работы они выдают хороший крутящий момент, демонстрируют устойчивость к разнотипным воздействиям, а также на порядок медленнее поддаются износу. Конструкция включает основные детали: статор и ротор, последний — магнитного типа бывает мягкого или твердого исполнения.
Читайте также: