
Deek robot bl 02 подключение к лабораторному блоку питания
Я уже как-то выкладывал обзор очень похожего прибора, даже название обзора было почти таким же, но в этот раз приборчик стоит немного дешевле, да и качество точно не хуже чем у предыдущего. В общем мини обзор полезной для радиолюбителя вещицы.
Перед тем как перейти к собственно обзору, пару слов о цене. В заголовке указана цена $1.72, на самом деле общая стоимость выходит больше из-за платной доставки, причем в Россию она дешевле чем к нам и сумма составляет $2.51 против $3.97, но так как в заказе было с десяток приборов, то в итоге разница получилась не такой и большой.
Технические характеристики
Измеряемое напряжение - до 99.9 Вольта
Разрешение при измерении напряжения - 0.1 Вольта
Измеряемый ток - до 9.99 Ампера
Разрешение при измерении тока - 0.01 Ампера
Точность измерения: 1% (± 1 разряд)
Напряжение питания - 4-30 Вольт
Ток потребления - менее 20 мА
Частота обновления: около 3 Гц
Размеры: 48 мм * 29 мм * 26 мм
Рабочая температура:-10 °-+ 65 °
Первое на что обращаешь внимание при включении, анимация по крайним сегментам индикатора, я как-то раньше подобного не встречал.
Ну и конечно же тесты.
Для начала оценка тока потребления и минимального рабочего напряжения.
1. При напряжении около 2.6 Вольта прибор включается, но показания на дисплее будут далеки от реальных.
2. Дальнейшее повышение напряжения питания до 3.6-3.7 Вольта выводит прибор на рабочую точку, это видно по прекращению роста потребляемого тока. Ток потребления при этом около 10мА
3. При входном напряжении 28 Вольт ток потребления сохраняется примерно на том же уровне.
4. Близкий к максимальному ток потребления составляет около 12-13 мА
5. При входном напряжении 3.7 Вольта показания уже корректные. На фото вход прибора подключен к питанию самого прибора.
6. Показания немного занижены, буквально на 0.1 Вольта, но это проявляется и при более высоком напряжении питания.
Тест показал что:
1. Потребление явно ниже заявленных "до 20 мА" и реально ближе к 10-13, что как по мне очень даже неплохо.
2. Минимальное напряжение питания не 4, а 3.7 Вольта, так что здесь тоже все отлично.
Так как описывать особо больше нечего, то подведу краткий итог:
Прибор довольно легко поддается калибровке, хотя даже изначально при измерении напряжения погрешность была не очень большой.
Имеет очень малый ток потребления и диапазон рабочего напряжения примерно от 3.7 Вольта.
При всем этом цена более чем доступна.
На мой взгляд, с учетом перечисленных преимуществ, я могу смело рекомендовать его к приобретению.
На этом у меня на сегодня все, надеюсь что этот микрообзор был полезен.
Эту страницу нашли, когда искали:
регулировка ампер вольт метра 10 а 100в , принципиальная схема ампервольтметра maxhome. hmd-1v100-10a , m5333b smd , вольтметр амперметр цифровой размеры , принципиальная схема вольтамперметра м3430 , тестер для автомобиля цифровой вольтметр амперметр измеритель переменного тока 100 в 10a , схема вкл китайского , 5333b стабилизатор чем заменить , схема принципиальная китайского ампервольтметра , параметры ампервольтметр m3430 , bl 02 вольтметр схема включения , м5333 характеристики , цифровой вольтметр амперметр m3430 постоянного тока схема подключения , схемы подключения цифрового индикатора hks dc028100 в 10 а , цифрового ампервольтметра , вольт амперметрм3430 , вольтамперметр m3430 схема , амперметр х10ua на 100 вольт характеристики , схема вкл китайского av metra , ампер вольтметр цифровой м3430 схема , вольтамперметр м 3430 принципиальная схема , м3430 вольтметр схема , цифровой вольтамперметр 30в 10а купить в минске , схема подключения цифрового вольтамперметра амперметра из китая м3430 , схема подключения м3430 ампервольтметра с алиэкспресс , цифровой ампервольтметр , китайский ампервольтметр , как измерить напряжение , как измерить силу тока , ампервольтметр

Цифровой вольтметр, амперметр, ваттметр SHIELD MODEL BL-02 используется для измерения, индикации напряжения, тока (ток постоянный), потребляемой мощности.
Прибор оснащен двумя гнездами: одно – трех контактное, второе – двух контактное. К гнездам в комплекте с вольтметром идут два соответствующих коннектора. Трех контактное гнездо используется для подачи на вольтметр напряжения питания и для измерения значения напряжения. Двух контактное гнездо используется для измерения значения тока.
Для использования SHIELD MODEL BL-02 нужно обеспечить ему напряжение питания значением 7 – 12 В постоянного тока. Для подключения напряжения питания используются красный и черный проводники трех контактного гнезда, обозначенные на плате прибора I и G соответственно. Источником напряжения питания вольтметра может быть измеряемое напряжение, если оно соответствует требованиям прибора. Если запитать прибор от измеряемого напряжения, это практически не повлияет на точность измерения т.к. вольтметр потребляет мало мощности. Напряжение питания вольтметра не должно превышать 13 В постоянного тока, иначе прибор выйдет из строя.
После подключения напряжения включается жидкокристаллический дисплей с диагональю 1,65 дюйма и синей подсветкой.
Дисплей вольтметра SHIELD MODEL BL-02:
В верхней части дисплея показывается значение напряжения посредине значение тока с точностью до одной сотой. В нижней части дисплея показывается значение потребляемой мощности в ватах с точностью до десятых.
На передней панели прибора есть два потенциометра для ручной калибровки значений напряжения (обозначение V_CAL) и тока (обозначение A_CAL).
Для измерения напряжения нужно подключить белый проводник, обозначенный на плате прибора O, и общий контакт к нужным точкам на схеме. Измерительные проводники подключаем в схему параллельно, соблюдая полярность. Максимальное значение измеряемого напряжения 100 В постоянного тока.
Для измерения тока нужно подключить в схему красный проводник двух контактного гнезда и общий контакт того же гнезда. Измерительные проводники подключаем в схему последовательно, соблюдая полярность. Максимальное значение измеряемого тока 10 А постоянного тока.
Схема подключения прибора SHIELD MODEL BL-02:
Прибор может одновременно измерять и показывать на дисплее текущее значение тока, напряжения и потребляемой мощности.
Вольтметр поставляется в пластиковом корпусе черного цвета с защелками для установки на приборную панель, стенку, щит, пульт. Передняя часть прибора защищена корпусом, но задняя часть открыта, потому нужно максимально избегать агрессивных воздействий (падений, ударов, вибрации, попадания пыли, попадания влаги и т.п.).
производитель: Deek-Robot;
модель: SHIELD MODEL BL-02;
дисплей: жидкокристаллический;
диагональ дисплея: 1,65 дюйма;
измеряемый ток: постоянный;
напряжение питания прибора: 7 – 12 В DC;
измеряемое напряжение: 0 – 100 В DC;
измеряемый ток: 0 – 10 А DC;
измеряемая текущая мощность: 0 – 1000 Вт;
точность: 1%;
монтажные размеры: 70 x 40 x 14 мм;
габариты: 79 x 43 x 15 мм;
вес: 35 г.

Схема электропитания.
От того как сделаете питание зависит сколько времени вы сможете наслаждаться роботом и как часто будите бегать в магазин за батарейками.
Основная концепция построения питания разделить мозг и потребители. Нужно это для того, что бы работа основных «пожирателей» не влияла на стабильное питание «мозга» — ARDUINO.
Для этого в наборе два вида блоков:
— пластиковый бокс держатель для батареек типа «Крона» — питание 9 вольт;
— пластиковый бокс держатель для 4 батареек типа АА – 6 вольт.
Блок для «Крона» имеет штекер и предназначен для подключения ARDUINO. 9 вольт выдаваемых батарей подходят с запасом для питания ARDUINO – рекомендованный диапазон для входного напряжения 7 – 12 вольт.

После напряжение понижается внутренним стабилизатором ARDUINO до 5 Вольт – на этом напряжении работает сам ARDUINO и подключаемые датчики и контроллеры. Мощности «Кроны» хватает на работу самого процессора, но когда от этого напряжения начинают запитывать всю «обвеску» — надолго «Кроны» не хватает и приходится бежать в магазин.
Поэтому в процессе «эволюции» я дошел до того, что питаю ARDUINO от 6 батарей АА – это те же 9 вольт, но гораздо мощнее и дешевле «Кроны». Кроме того в планах заменить на аккумуляторы, а энергоемкие потребители (сервоприводы «манипулятора») запитать от другого источника – об этом далее.
Блок для 4 батарей АА предназначается для питания двигателей. Штекеров блок не имеет – провода подключается к «драйверу» моторов – провода вставляются в разъемы и прижимаются винтами. Схема подключения указана на схеме – подключение двигателей.

Для начала – 4-х батарей АА выдающих 6 вольт, вполне достаточно. Но потом моторы начинают вращаться медленнее, робот начинает задумываться и «терять» полосу… Снова бежать в магазин за батарейками! После двух походов было принято решение поставить аккумулятор от фотоаппарата Canon, которых у меня завалялось три штуки… Это не обязательное решение – подойдет любой компактный аккумулятор с питанием выше 6 вольт, ну и помощнее. Например от радиоуправляемой машины.
Обращаю внимание, что если использовать аккумуляторы АА – то у них напряжение не 1,5 вольт, а 1,2 вольта. Таким образом, блок из 4 батарей выдаст уже не 6 вольт, а 4,8 вольта! Поэтому если будите использовать аккумуляторы АА – нужно подумать о добавлении еще нескольких батарей (установке дополнительных блоков).
Не смотря на то, что у нас раздельное питание, есть у них общие моменты.
1. Выключатель питания – один для обоих источников питания — что бы одним движением обесточивать обе схемы. Я использовал двухполюсной выключатель. Хотя можно и однополюсным – отключать «минус» от обоих схем.
2. Общий «минус» — обе схемы питания должны быть соединены полюсами « — » или по английски GND. Если этого не сделать, то ваш «драйвер» моторов не будет понимать сигналы от ARDUINO. Но я сделал это соединение не «жестким», а через разъем – помогает отключать моторы – когда идет настройка датчиков, а жужжание моторов отвлекает.
По поводу раздельного питания потребителей подключенных к ARDUINO (например, сервомоторов) – чтобы не «городить» еще один источник питания 5 вольт, нужно организовать питание 5 вольт от батареи моторов. Для этого потребуется поставить стабилизатор, который бы преобразовывал напряжение питания моторов в 5 вольт и подавал к сервомоторам, или другим потребителям, через плату расширения (Arduino sensor shield v5).

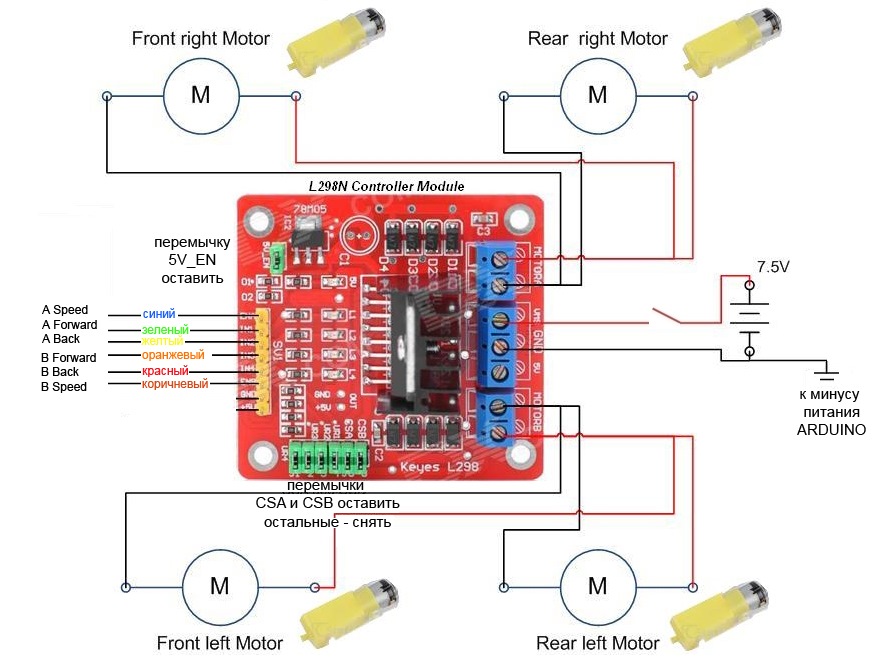
Подключение моторов.
Время подключить моторы, для этого используем «драйвер» для управления 2-мя DC моторами — L298N Dual H-Bridge Stepper Motor Driver Controller (WB291111). Несмотря на то, что в описании указано «2-мя DC моторами» — это всего лишь означает, что она управляет двумя каналами – в нашем случае левыми и правыми колесами, а двигателей можно подключить в каждый канал сколько угодно – лишь бы драйвер не сгорел от нагрузки.
И так, подключаем двигатели как указано на схеме ниже – 2 или 4 – смотря какая у вас «тележка». Так же на схеме «описана» организация питания, выводы для соединения «драйвера» с ARDUINO, а также особенности конфигурирования «драйвера».
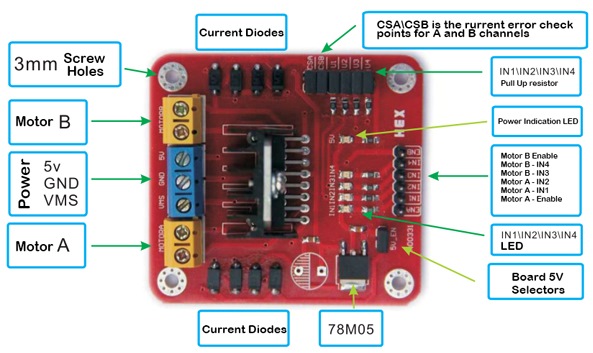
Соединение «драйвера» с ARDUINO организовано через разъемы название и описание которых указано ниже:
ENA – управляет скоростью вращения мотора А (с помощью ШИМ) – обязательно должен быть подключен к выводу ARDUINO работающему с ШИМ (помечен волнистой линией);
I1 – управляет направлением вращения мотора А – в моем случае сигнал на данном выводе заставляет мотор А крутится «вперед»;
I2 – управляет направлением вращения мотора А – в моем случае сигнал на данном выводе заставляет мотор А крутится «назад»;
I3 – управляет направлением вращения мотора B – в моем случае сигнал на данном выводе заставляет мотор B крутится «вперед»;
I4 – управляет направлением вращения мотора B – в моем случае сигнал на данном выводе заставляет мотор B крутится «назад»;
ENB – управляет скоростью вращения мотора B (с помощью ШИМ) – обязательно должен быть подключен к выводу ARDUINO работающему с ШИМ (помечен волнистой линией).
В последующем если направление вращения моторов не будет совпадать с сигналами – поменяйте местами подключение моторов.
На некоторых «драйверах» есть еще разъемы:
GND – для связи полюса «минус» ARDUINO и «драйвера»;
5V – для подачи питания 5 вольт (используется для управления) на плату «драйвера» от ARDUINO, для этого дополнительно нужно переставить перемычку на плате драйвера.
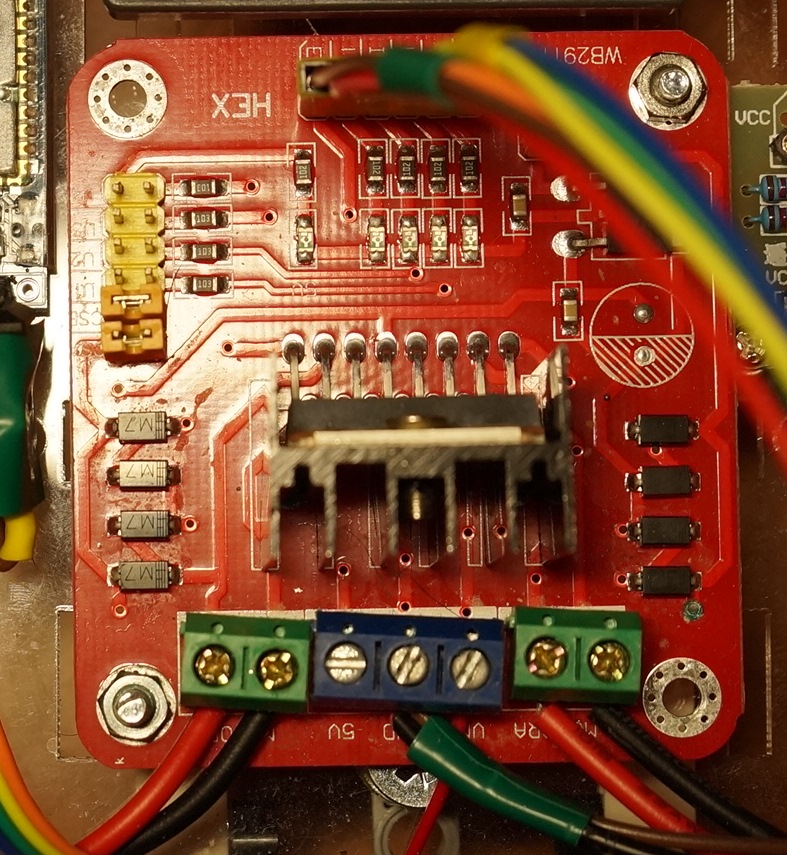
На плате «драйвера» моторов много «перемычек» и прежде чем начать работать, нужно их правильно расставить.
Перемычка «5V_EN» — оставляем ее, если «драйвер» будет питаться от напряжения питания моторов. Если хотите «драйвер» питать 5 вольтами от ARDUINO, то уберите данную перемычку и подсоедините к драйверу 5 вольт от ARDUINO. У меня перемычка осталась на плате.
Перемычки CSA, CSB, UR1, UR2, UR3, UR4 – назначение этих перемычек мне до конца не известно. Одно могу сказать точно:
— перемычки CSA, CSB – оставляем;
— перемычки — UR1, UR2, UR3, UR4.
Кроме этого на плате есть светодиоды, которые могут помочь, контролировать правильность работы логики – по ним можно определить поступление сигналов на вращение (сигнал на IN1, IN2, IN3, IN4), а так же наличие питания – «5V».
Время соединить ARDUINO и «драйвер» моторов.
Подключение «драйвера» моторов.
Для подключения «драйвера» моторов потребуются провода из набора – подключение их к «драйверу» я уже описал выше. Подключение к ARDUINO я сделал к следующим разъемам:

ПРИМЕЧАНИЕ: Вывод 3~ ARDUINO по непонятным причинам при ИК управлении не работает в режиме ШИМ.
Вообще подключение может быть сделано к любым разъемам ARDUINO, главное, что бы каналы которые управляются по ШИМ были, подсоединены к разъемам, поддерживающим ШИМ – на плате ARDUINO они помечены волнистой линией « ~ ». Исключение вывод «0» — если к нему, что-то подцеплено, то ARDUINO не будет ничего «слушать», кроме сигналов поступающих туда. Кроме того, регулировка оборотов (ШИМ) на разъеме 3 не работает при инфракрасном управлении.
С учетом всех этих особенностей, выявленных «методом проб и ошибок» я составил общую схему подключения, для всех имеющихся в наборе датчиков и потребителей, и все «скетчи» построены под данные подключения – при смене функций, переподключать ничего не нужно.
Номера разъемов буду указывать по мере описания функций. Также попозже приложу полный перечень подключений.
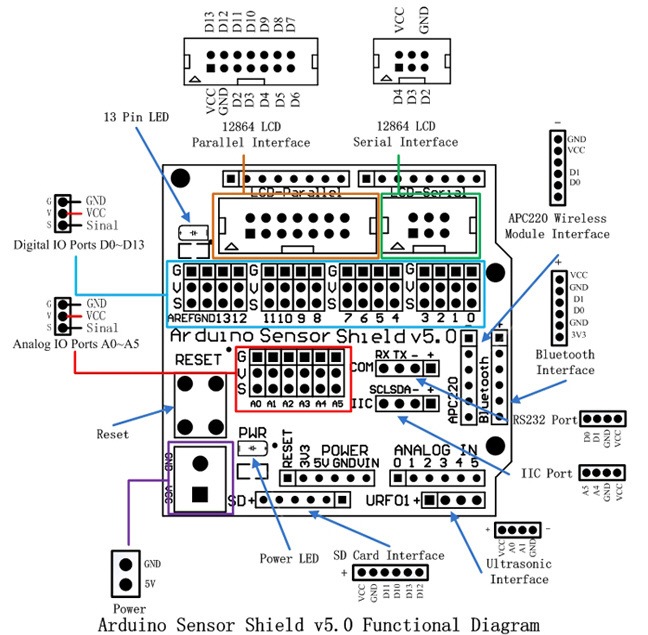
На самом деле, рассказ про подключение был бы не полный, если не рассказать про плату расширения для подключения датчиков и «потребителей» — Arduino sensor shield v5.
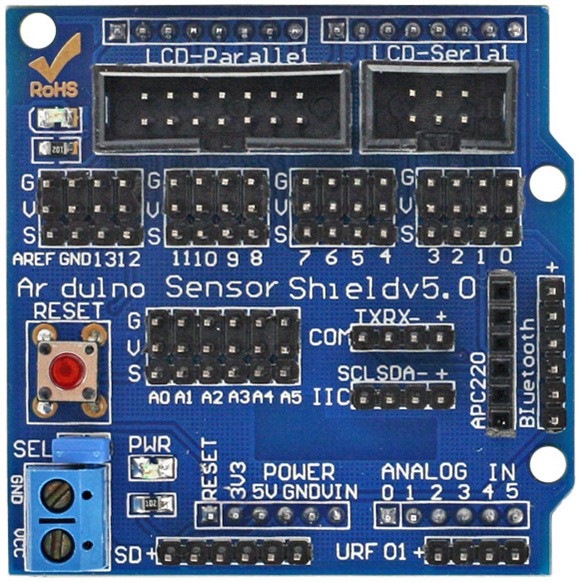
Данная плата разработана для того, чтобы облегчить подключение датчиков и потребителей. Так, например, мало соединить сигнальные выводы датчика – нужно еще подать питание на этот датчик. И для этого на плате рядом с сигнальным разъемом два разъема питания 5 вольт. Кроме того, некоторые разъемы сгруппированы для подключения конкретных «потребителей» – например блютуз, COM порт и т.п. Все это можно увидеть на схеме ниже.
Обращаю внимание, плата расширения всего лишь плата с разъемами в ней нет никаких преобразователей и логики, но многие разъемы продублированы. Поэтому внимательно проверяйте подключения, чтобы они не оказались на одних и тех же разъемах. В моей схеме подключения я постарался это учесть.
Сама плата вставляется в ARDUINO. Провода для подключения к ней используются типа «мама» — «мама».
Кроме того, на плате есть разъем «Power» для подключения внешнего источника питания 5 вольт – для того что бы запитать потребители подключенные к плате расширения от отдельного источника питания.

От данного разъема запитаны только разъемы питания «V» цифровых выходов – на рисунке выделены синим. Для того чтобы запитать эти разъемы от внешнего источника, нужно подключить к разъему «Power» 5 вольт и снять перемычку «SEL».
Также на плате расширения продублирована кнопка «Reset» — ее нажатие обнуляет программу – нет необходимости постоянно выключать роботягу.
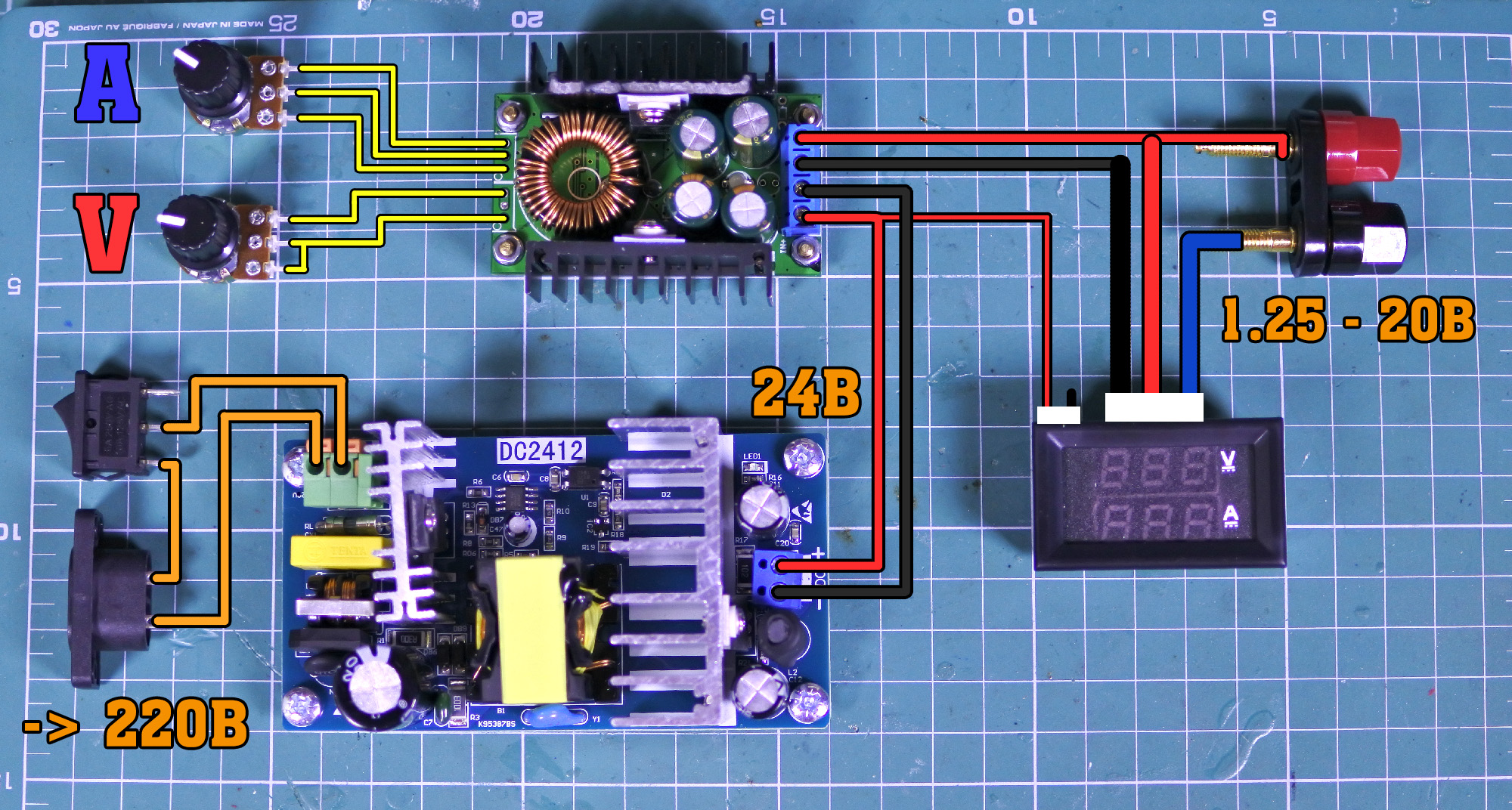
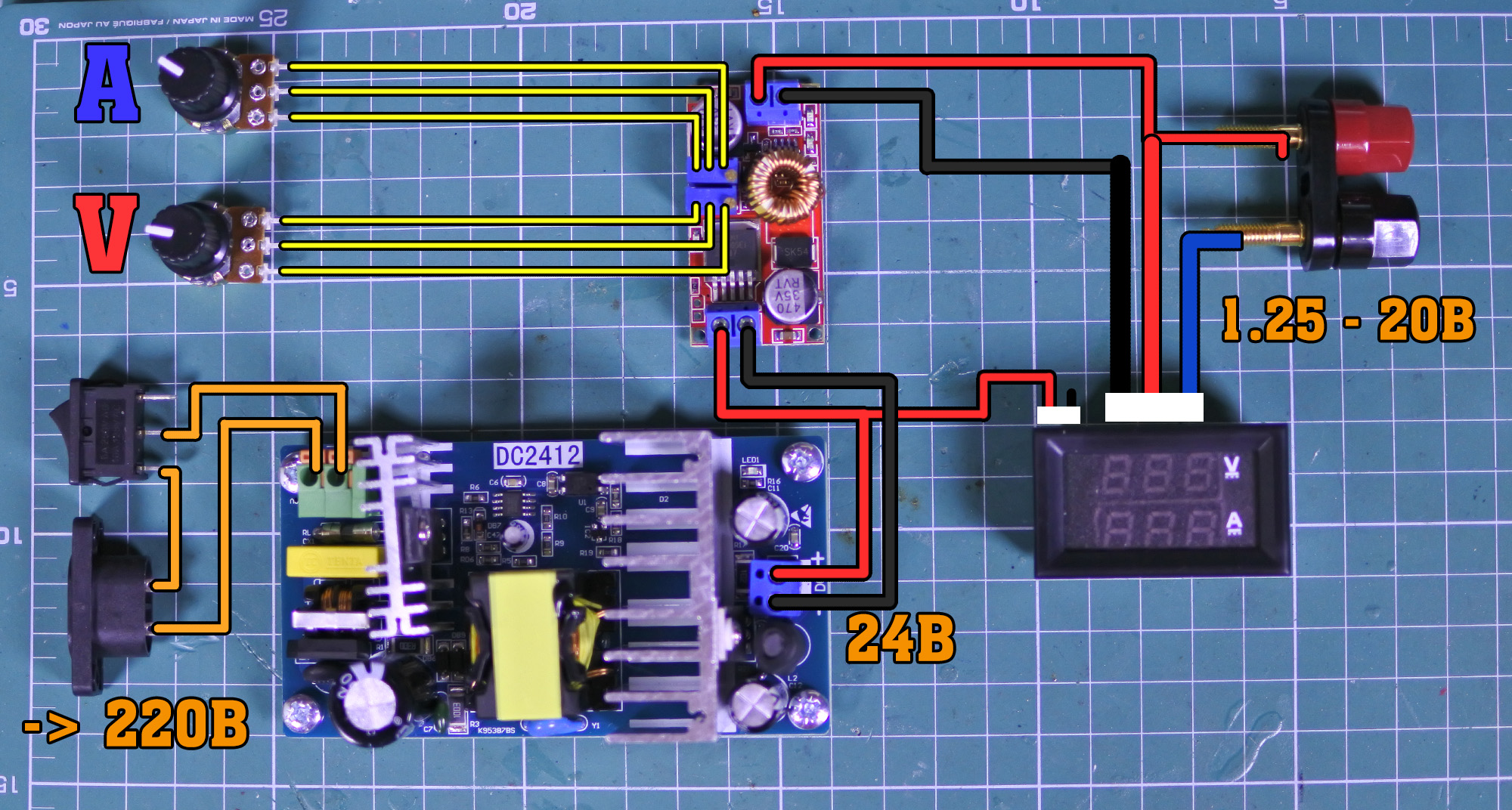
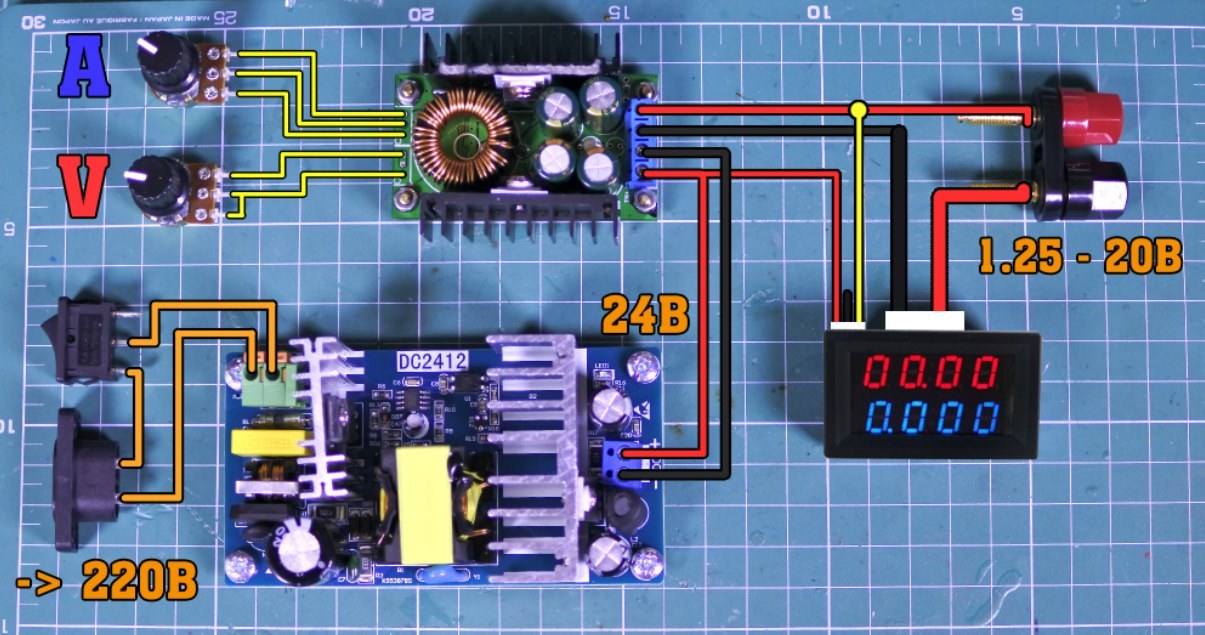
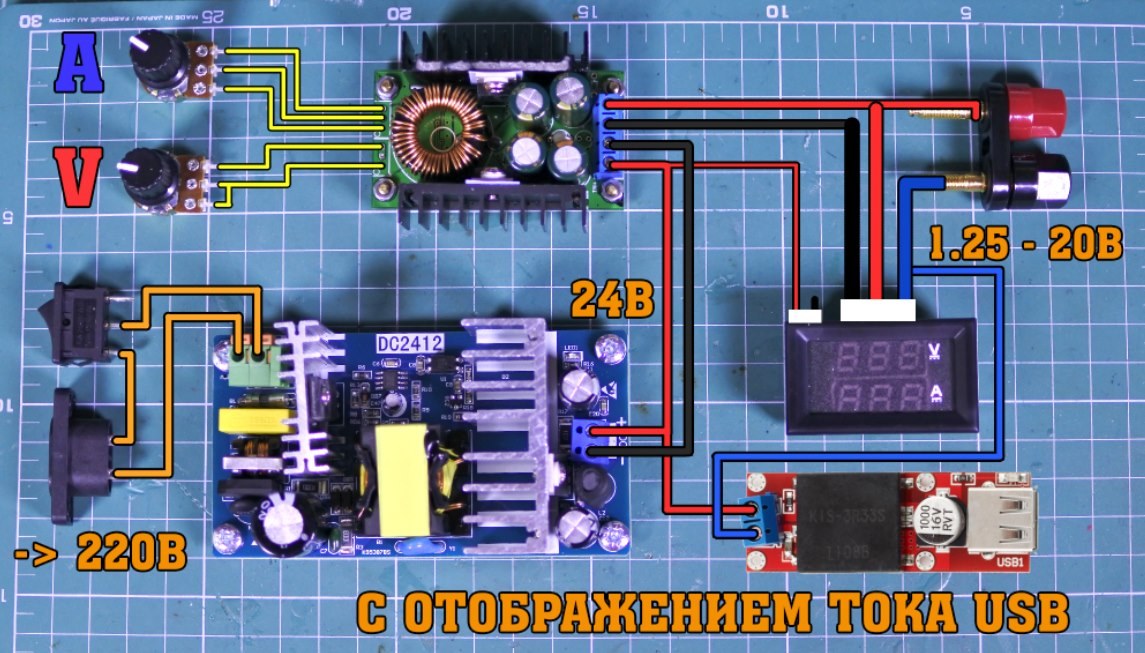
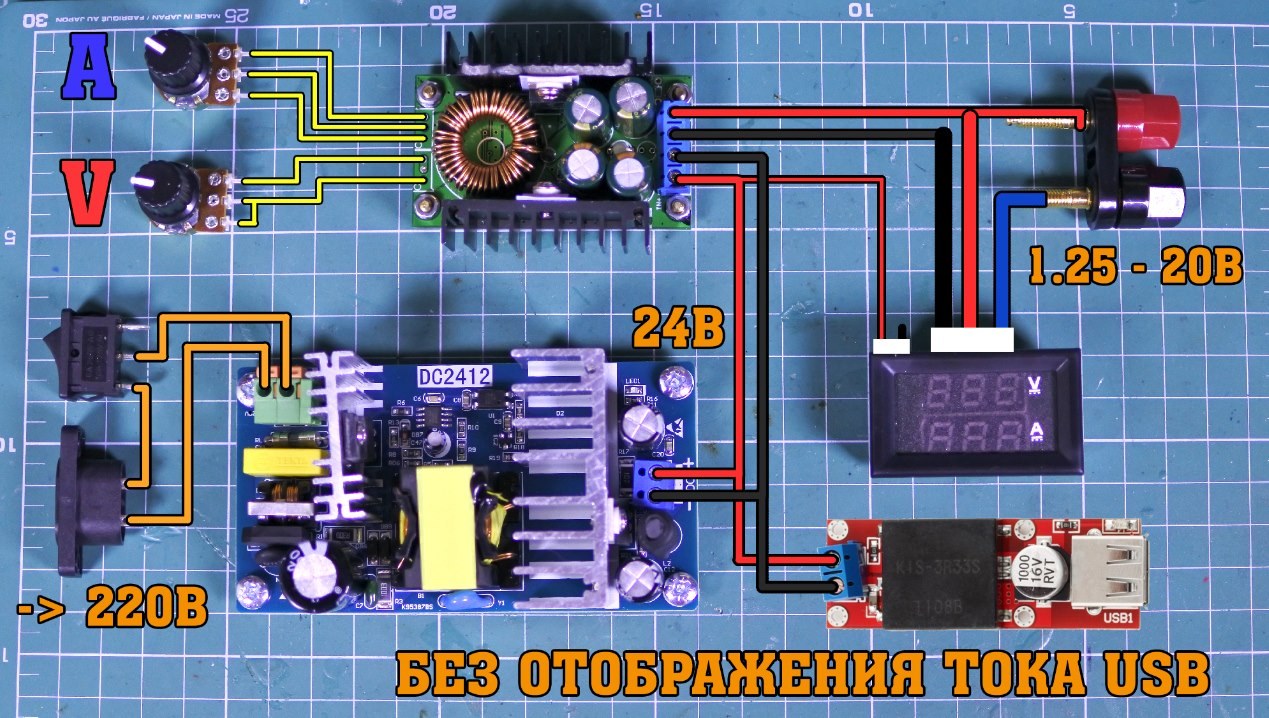
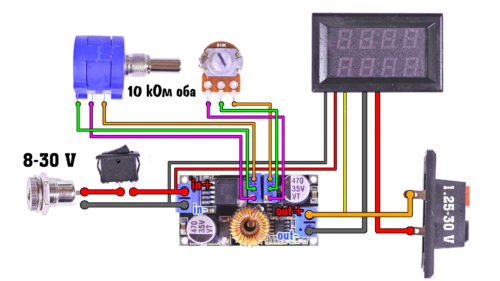
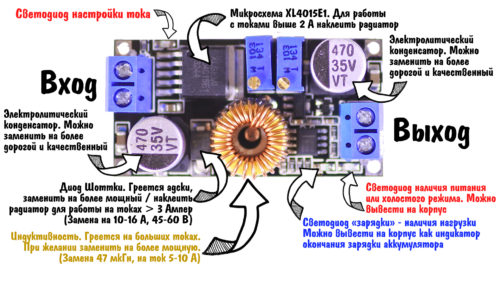
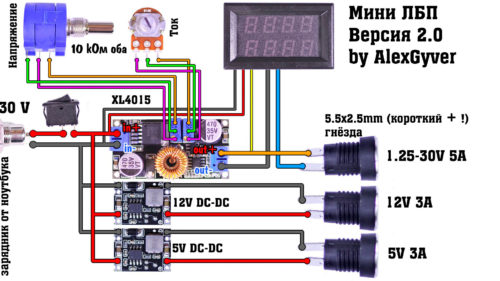
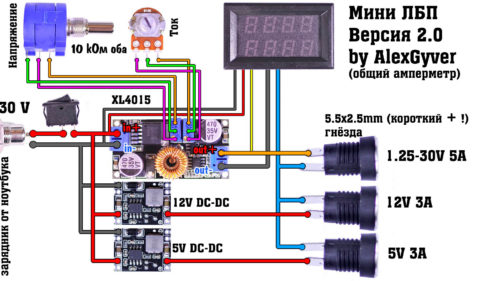
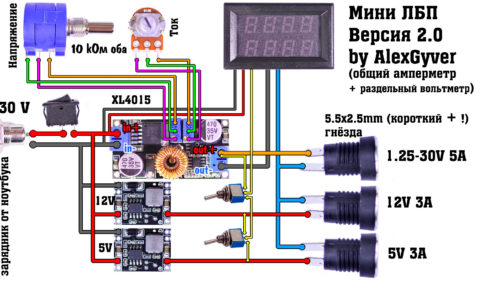
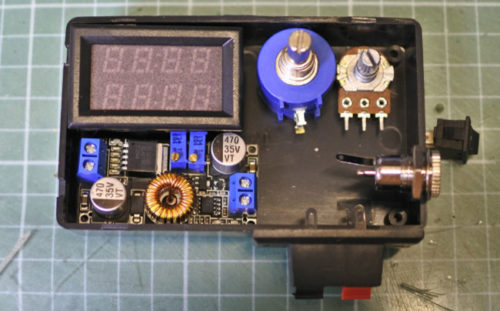
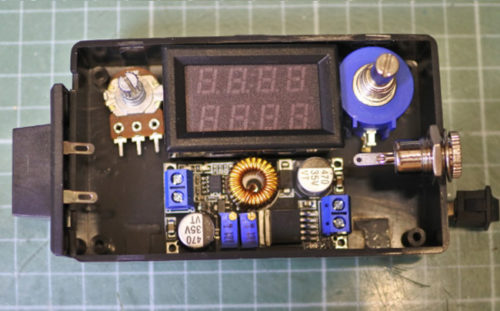
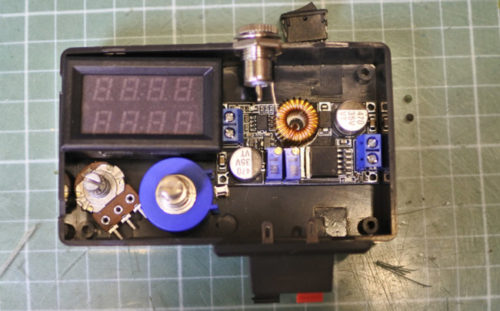
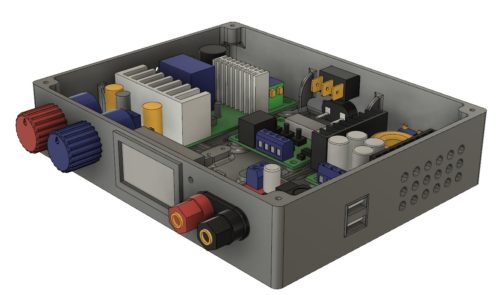
На этой странице вы найдёте видеоинструкции, схемы и советы по сборке лабораторного блока питания из китайских модулей своими руками. Здесь представлены два варианта регулируемых блоков питания: полноразмерный “всё-в-одном” с мощностью около 100 Ватт и размерами корпуса 170х120х45 мм, а также мини-версия с отдельным блоком питания, мощностью 50 Ватт (100 Ватт пик), и компактным корпусом 100х60х25 мм. Оба проекта имеют регулируемое напряжение, регулируемый ток (ограничение по току), вольтметр и амперметр. Делитесь своими вариантами исполнения в теме проекта в нашем сообществе!
ВИДЕО
КОМПОНЕНТЫ
AC DC 24V 6A

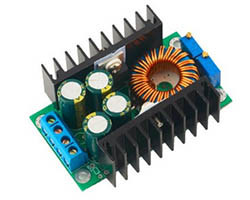
DC ВС XL4016
40 мм вентилятор

Выключатель

Термореле

Термореле мини

Понижайка

Гнёзда С8

Гнёзда С8
Провод С8

Силовой провод

Гнёзда под банану

Клеммник

Банана – крокодилы

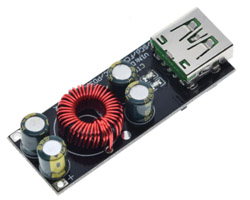
USB 1 выход 3A

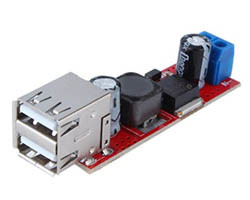
USB 2 выхода
USB QC 4.0
DIY ВЕРСИЯ


МИНИ ВЕРСИЯ

ВАМ ОБЯЗАТЕЛЬНО ПРИГОДИТСЯ
Паяльники, припой

Мультиметры

Радиодетали

Блоки питания

Инструменты

Шуруповёрты

КОРПУС ПОД 3D ПЕЧАТЬ







КИТАЙСКИЕ ЛБП

300W, 0-30V, 0-10A, CC/CV, QC

300W, 30V/10A или 60V/5A, CC/CV
ВИДЕО
КОРПУС ПОД 3D ПЕЧАТЬ
Крутой корпус от Андрея Бесараба (EVERYLIGHT). Файлы можно скачать с Яндекс.диска или из статьи (статья включает рекомендации по сборке)

По поводу китайских диагностических адаптеров для OBD2, построенных на базе клона микроконтроллера ELM327 было сказано много, и ещё больше не по делу. Присоединюсь и я.
«Нет времени объяснять», просто не берите v2.1 — это совершенное другое устройство. Повторяю: это не другая версия прошивки, это вообще другое устройство на другой элементной базе (внутри микросхема залитая компаундом). v2.1 сто́ит около 3 USD, в то время как v1.5 около 6 USD. Подробнее в статье от Bitstream .
ОБЗОР АДАПТЕРА
На Aliexpress (реклама!) был заказан ELM327 v1.5 с поддержкой Bluetooth, построенный на базе микроконтроллера PIC18F25K80. Имя устройства «OBDII», MAC AA:BB:CC:11:22:33.

Плюсы:
— Версия прошивки устройства 1.5, в отличие от 2.1, позволяет отправлять и получать ответы на PID'ы не входящие в стандарт OBD2. Это позволит считать из ECU Sirius D42R пробег, уровень топлива, продолжительность импульса открытия форсунки и пр. Ссылку на файл с этими custom PID см. в Оглавлении.
— Не имеет кнопки или спящего режима и всегда потребляет 33-40 мА. Для сравнения, вся моя машина под охраной (фактически только сигнализация) потребляет 15.5 мА. Почему тогда плюс? При подаче питания устройство всегда само включается. Немного изменим проводку: на 16 пин диагностической колодки подадим питание +12 В не от BAT, а от IGN1 и пусть устройство работает только когда ключ в положении ON (см. электросхемы). Всё равно в положениях ключа OFF и ACC ECU выключен и считывать диагностическую информацию нельзя.
Минусы:
— Имя Bluetooth SPP («OBDII»), MAC-адрес («AA:BB:CC:11:22:33»), PIN («1234») у всех устройств одинаковые! Китайцы поленились присвоить уникальные имя и MAC, так что будет конфликт адресов, если рядом работает такой же адаптер. Я сталкивался с проблемой два раза на стоянке, пришлось удалять и спаривать Bluetooth-устройства заново.
— Команда ATRV бесполезна, так как, по всей видимости, из-за неравномерного энергопотребления bluetooth-модуля напряжение измеряется неточно и варьирует от 3 до 20 Вольт. К счастью, существует custom PID с напряжением бортовой сети, измеряемым непосредственно ECU.
ИЗУЧЕНИЕ АДАПТЕРА
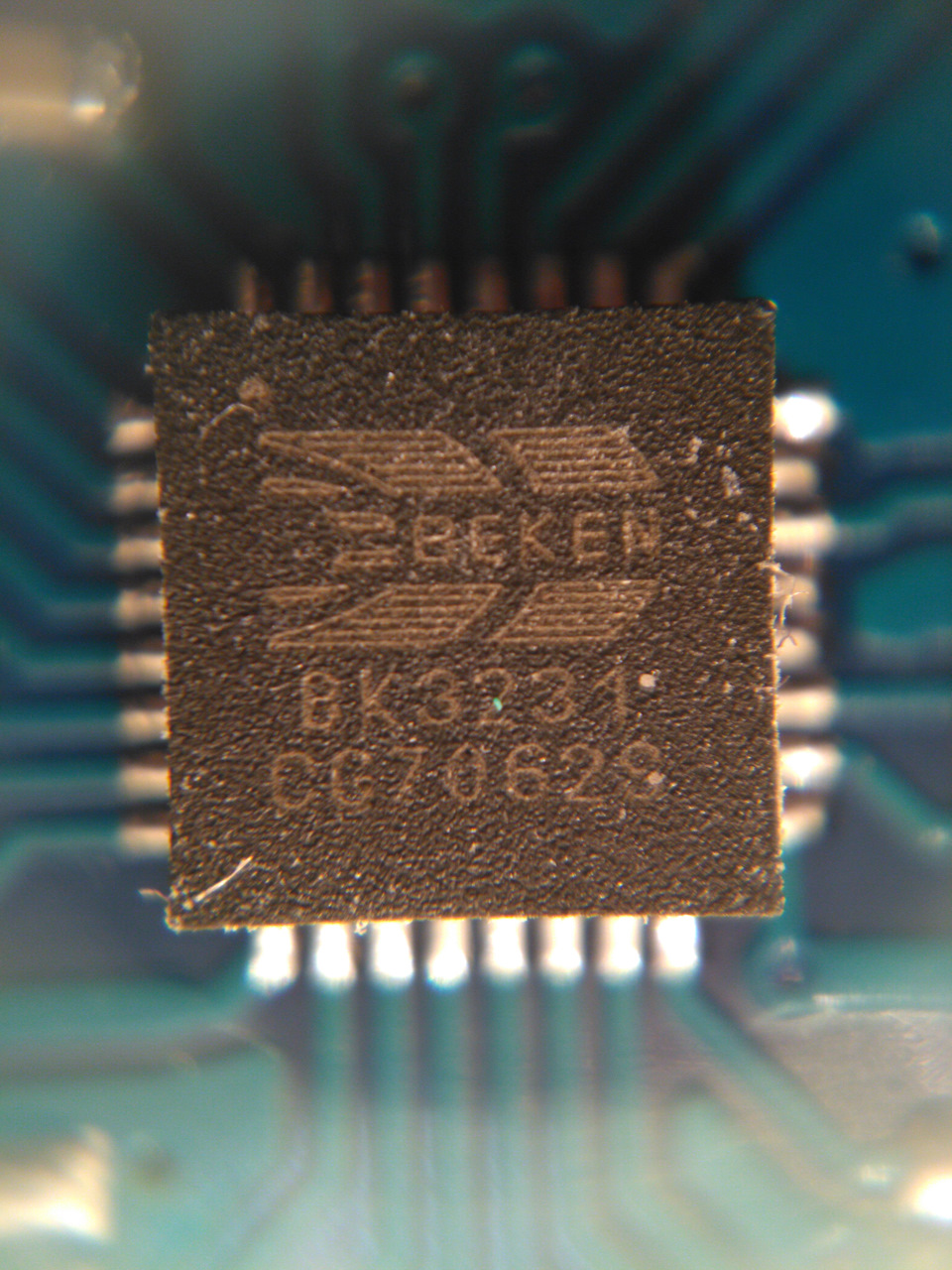
Внутренности

Подготовка
Нам потребуется как минимум:
— Маломощный паяльник с тонким жалом
— USB2UART на микросхеме FT232RL (1.85 USD Deek-Robot)
— Источник питания постоянного напряжения 12 В
Удобства добавят:
— Провода с крокодилами на концах для подключения питания 12 В
— Провода с пинами на концах и отладочная плата «solderless breadboard» для подключения USB2UART
Вмешательство
Совет: Ещё перед тем как разбирать свой ELM327 подайте 12 вольт на него по схеме ниже. Bluetooth-устройство «OBDII» будет видно в списке доступных, например, на смартфоне. Метод пригоден для тестирования любого ELM327-адаптера вне автомобиля, при этом команды ATZ, ATRV в терминале будут работать.
А теперь рисуем сову:
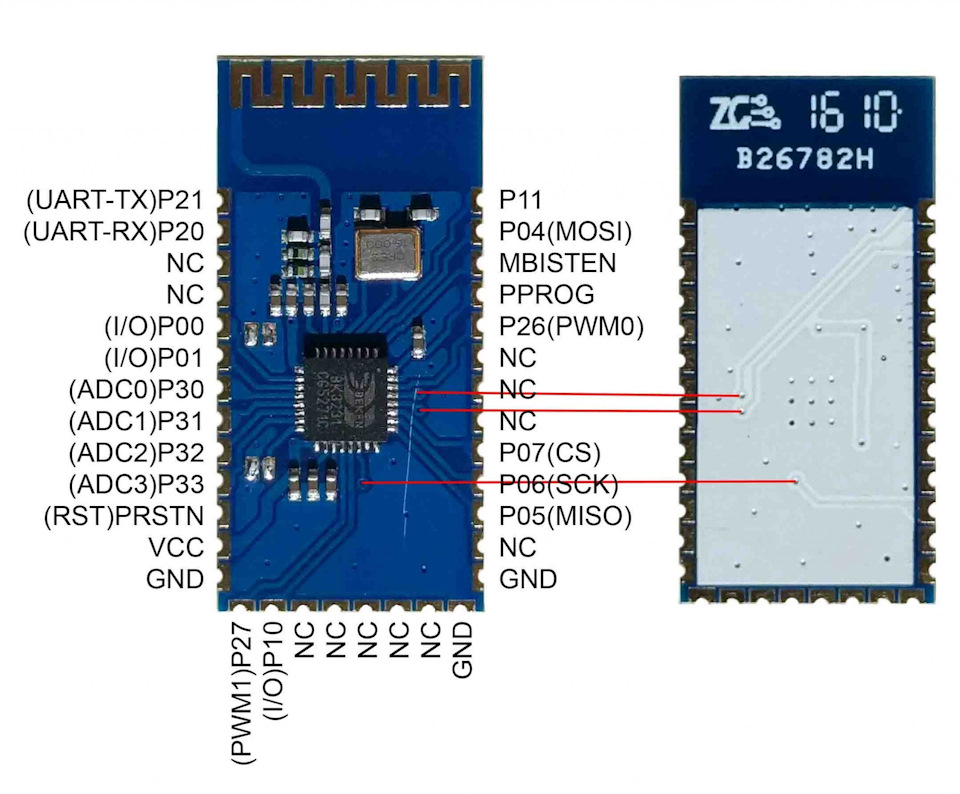
1. Подпаиваемся тонкими медными проводами к пинам Bluetooth-модуля UART-TX(P21), UART-RX(P20) — выпаивать модуль и отключать его от платы не обязательно. Bluetooth-модуль возьмёт питание 3.3 В через VCC и GND с платы. (Правда я в первый раз всё же выпаял и получил проблему поиска отдельного источника питания 3.3 В.)
2. Подключаем пины для UART вперекрёст:
● USB-UART RX на UART-TX(P21) модуля
● USB-UART TX на UART-RX(P20) модуля
● GND на GND блока питания 12 В (Оказалось, что можно не подключать.)
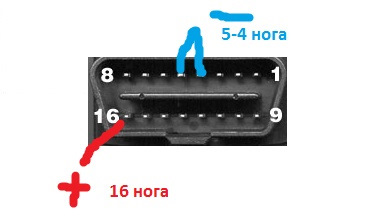
3. Чтобы подать 3.3 вольта на Bluetooth-модуль нам нужно подать 12 В на сам ELM327-адаптер. Подключаем два крокодила на ноги адаптера:
● +12 В на 16-й пин
● GND на 4, 5 пины и к GND USB-UART. В этом адаптере 4 и 5 пины электрически соединены, в моей Chevrolet Aveo тоже, так что можно подключить только 4 или 5 ногу.

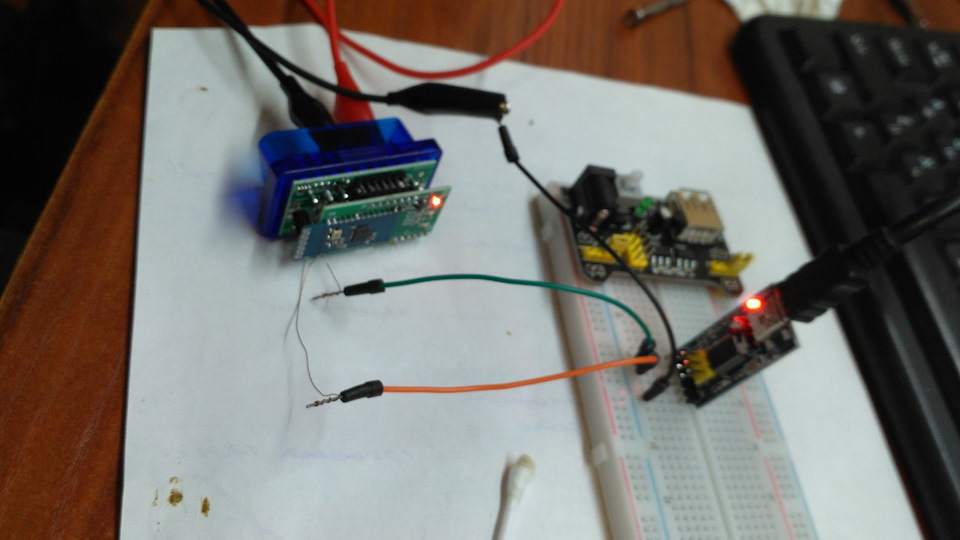
Пины USB-UART RX, TX подключёны к UART-TX(P21), UART-RX(P20) соответственно. Общий GND для ELM327 и USB-UART берётся от блока питания 12 В через чёрные крокодилы
Подключение к Beken BK3231 через терминал
ОТКЛЮЧИТЕ ВСЕ BLUETOOTH УСТРОЙСТВА, КОТОРЫЕ БЫЛИ СПАРЕНЫ С АДАПТЕРОМ. Пока активно Bluetooth-соединение BK3231 не будет принимать AT-команды. AT-режим работает всегда (специально включать не нужно), но доступен только по проводам.
1. Включите USB-UART преобразователь. Включится только он.
2. Подайте 12 Вольт на ELM327. Включится адаптер и Bluetooth-модуль.
Настало время терзать терминал. На самом деле по UART доступны и Bluetooth-модуль, и ELM-чип. Оба, разумеется, преднастроены китайцами работать на одной и той же baud rate. Экспериментально выяснилось, что это 38400, у Вас может быть другая скорость. Подключаемся к Bluetooth-модулю (лично я использую serial terminal из пакета pyserial):
$ miniterm.py /dev/ttyUSB0 38400 --eol CRLF
--- Miniterm on /dev/ttyUSB0 38400,8, N, 1 ---
В ответ на команду 'AT' должно вернуться 'OK' (ввод не отображется, вводите вслепую или копируйте и вставляйте). Если кракозябры, то меняйте baud rate. Если знаки вопроса, то, возможно, перепутали tx и rx местами и подключились к ELM327. Скопируйте и вставьте команды 'AT+VERSION', 'AT+HELP' чтобы убедится, что всё хорошо. Прочитайте вывод 'AT+HELP' и возрадуйтесь, Вы молодец! Теперь можно сменить имя, PIN, MAC устройства:
AT+NAMEAveo
AT+PIN12345678
AT+LADDR00:00:B1:6B:00:B5
В хелпе и документации не указано, что 'AT+LADDR' позволяет изменять MAC устройства. Но нам повезло. Не меняйте класс устройства без необходимости; у меня от этого пропал `/dev/rfcomm0` и пришлось вернуть класс по-умолчанию ('AT+COD001f00'). Я не пробовал сбрасывать настройки и менять baud rate. Если Вам недостаточно вывода 'AT+HELP', то см. этот пост за подробным описанием AT-команд.
Подключение к ELM327 через терминал
Если получилось описанное выше, то здесь всё элементарно: меняем пины tx и rx местами.
miniterm.py /dev/ttyUSB0 38400 --eol CR
--- Miniterm on /dev/ttyUSB0 38400,8, N, 1 ---
Вводим 'ATZ' или 'ATRV'. Поздравляю, у Вас получился ELM327-USB!
ПОДВОДИМ ИТОГИ
Итак, теперь машина видна как Bluetooth-устройство «Aveo». Мы присвоили уникальный MAC и задали свой пароль. На практике это используется так:
1. После поворота ключа в любое положение (ACC, ON, START) включается магнитола и вместе с ней гарнитура JRBC01. Смартфон автоматически к ней подключается и может запустить плеер и Hobdrive
2. В положении ключа ON, START (IGN1) на ELM327 подается питание и Hobdrive может подключится к ECU. В режиме охраны с работающим двигателем можно удалённо следить за прогревом машины. Но, увы, радиус действия Bluetooth не более 10 метров т.к. адаптер находится под рулевой колонкой у ног и экранирован кузовом.
3. При переключении из ON в ACC адаптер отключается, но всё ещё работает магнитола и Hobrive проигрывает аудиозапись «Двигатель отключён»
Читайте также: