
Что такое адрес процессора
Аннотация: В этой лекции рассказывается о функциях основных узлов процессора, о методах адресации операндов и о регистрах процессора.
Основная функция любого процессора, ради которой он и создается, — это выполнение команд. Система команд , выполняемых процессором, представляет собой нечто подобное таблице истинности логических элементов или таблице режимов работы более сложных логических микросхем. То есть она определяет логику работы процессора и его реакцию на те или иные комбинации внешних событий.
Написание программ для микропроцессорной системы — важнейший и часто наиболее трудоемкий этап разработки такой системы. А для создания эффективных программ необходимо иметь хотя бы самое общее представление о системе команд используемого процессора. Самые компактные и быстрые программы и подпрограммы создаются на языке Ассемблер , использование которого без знания системы команд абсолютно невозможно, ведь язык Ассемблер представляет собой символьную запись цифровых кодов машинного языка , кодов команд процессора. Конечно, для разработки программного обеспечения существуют всевозможные программные средства . Пользоваться ими обычно можно и без знания системы команд процессора. Чаще всего применяются языки программирования высокого уровня, такие как Паскаль и Си . Однако знание системы команд и языка Ассемблер позволяет в несколько раз повысить эффективность некоторых наиболее важных частей программного обеспечения любой микропроцессорной системы — от микроконтроллера до персонального компьютера.
Именно поэтому в данной главе мы рассмотрим основные типы команд , имеющиеся у большинства процессоров, и особенности их применения.
Каждая команда , выбираемая (читаемая) из памяти процессором, определяет алгоритм поведения процессора на ближайшие несколько тактов. Код команды говорит о том, какую операцию предстоит выполнить процессору и с какими операндами (то есть кодами данных), где взять исходную информацию для выполнения команды и куда поместить результат (если необходимо). Код команды может занимать от одного до нескольких байт , причем процессор узнает о том, сколько байт команды ему надо читать, из первого прочитанного им байта или слова. В процессоре код команды расшифровывается и преобразуется в набор микроопераций , выполняемых отдельными узлами процессора. Но разработчику микропроцессорных систем это знание не слишком важно, ему важен только результат выполнения той или иной команды.
3.1. Адресация операндов
3.1.1. Методы адресации
Количество методов адресации в различных процессорах может быть от 4 до 16. Рассмотрим несколько типичных методов адресации операндов , используемых сейчас в большинстве микропроцессоров.
Непосредственная адресация (рис. 3.1) предполагает, что операнд (входной) находится в памяти непосредственно за кодом команды. Операнд обычно представляет собой константу, которую надо куда-то переслать, к чему-то прибавить и т.д. Например, команда может состоять в том, чтобы прибавить число 6 к содержимому какого-то внутреннего регистра процессора. Это число 6 будет располагаться в памяти, внутри программы в адресе, следующем за кодом данной команды сложения.
Прямая (она же абсолютная) адресация (рис. 3.2) предполагает, что операнд (входной или выходной) находится в памяти по адресу, код которого находится внутри программы сразу же за кодом команды. Например, команда может состоять в том, чтобы очистить (сделать нулевым) содержимое ячейки памяти с адресом 1000000. Код этого адреса 1000000 будет располагаться в памяти, внутри программы в следующем адресе за кодом данной команды очистки.
Регистровая адресация (рис. 3.3) предполагает, что операнд (входной или выходной) находится во внутреннем регистре процессора. Например, команда может состоять в том, чтобы переслать число из нулевого регистра в первый. Номера обоих регистров (0 и 1) будут определяться кодом команды пересылки .
Косвенно-регистровая (она же косвенная) адресация предполагает, что во внутреннем регистре процессора находится не сам операнд , а его адрес в памяти (рис. 3.4). Например, команда может состоять в том, чтобы очистить ячейку памяти с адресом, находящимся в нулевом регистре. Номер этого регистра (0) будет определяться кодом команды очистки.
Реже встречаются еще два метода адресации .
Автоинкрементная адресация очень близка к косвенной адресации, но отличается от нее тем, что после выполнения команды содержимое используемого регистра увеличивается на единицу или на два. Этот метод адресации очень удобен, например, при последовательной обработке кодов из массива данных, находящегося в памяти. После обработки какого-то кода адрес в регистре будет указывать уже на следующий код из массива. При использовании косвенной адресации в данном случае пришлось бы увеличивать содержимое этого регистра отдельной командой.
Автодекрементная адресация работает похоже на автоинкрементную, но только содержимое выбранного регистра уменьшается на единицу или на два перед выполнением команды. Эта адресация также удобна при обработке массивов данных. Совместное использование автоинкрементной и автодекрементной адресаций позволяет организовать память стекового типа (см. раздел 2.4.2).
Из других распространенных методов адресации можно упомянуть об индексных методах, которые предполагают для вычисления адреса операнда прибавление к содержимому регистра заданной константы (индекса). Код этой константы располагается в памяти непосредственно за кодом команды.
Отметим, что выбор того или иного метода адресации в значительной степени определяет время выполнения команды. Самая быстрая адресация — это регистровая, так как она не требует дополнительных циклов обмена по магистрали. Если же адресация требует обращения к памяти, то время выполнения команды будет увеличиваться за счет длительности необходимых циклов обращения к памяти. Понятно, что чем больше внутренних регистров у процессора, тем чаще и свободнее можно применять регистровую адресацию, и тем быстрее будет работать система в целом.
3.1.2. Сегментирование памяти
Говоря об адресации, нельзя обойти вопрос о сегментировании памяти, применяемой в некоторых процессорах, например в процессорах IBM PC-совместимых персональных компьютеров.
В процессоре Intel 8086 сегментирование памяти организовано следующим образом.
Вся память системы представляется не в виде непрерывного пространства, а в виде нескольких кусков — сегментов заданного размера (по 64 Кбайта), положение которых в пространстве памяти можно изменять программным путем.
Для хранения кодов адресов памяти используются не отдельные регистры, а пары регистров:
- сегментный регистр определяет адрес начала сегмента (то есть положение сегмента в памяти);
- регистр указателя (регистр смещения) определяет положение рабочего адреса внутри сегмента.
При этом физический 20-разрядный адрес памяти, выставляемый на внешнюю шину адреса , образуется так, как показано на рис. 3.5, то есть путем сложения смещения и адреса сегмента со сдвигом на 4 бита. Положение этого адреса в памяти показано на рис. 3.6.
Сегмент может начинаться только на 16-байтной границе памяти (так как адрес начала сегмента, по сути, имеет четыре младших нулевых разряда, как видно из рис. 3.5), то есть с адреса, кратного 16. Эти допустимые границы сегментов называются границами параграфов.
Отметим, что введение сегментирования , прежде всего, связано с тем, что внутренние регистры процессора 16-разрядные, а физический адрес памяти 20-разрядный (16-разрядный адрес позволяет использовать память только в 64 Кбайт, что явно недостаточно). В появившемся в то же время процессоре MC68000 фирмы Motorola внутренние регистры 32-разрядные, поэтому там проблемы сегментирования памяти не возникает.
Применяются и более сложные методы сегментирования памяти. Например, в процессоре Intel 80286 в так называемом защищенном режиме адрес памяти вычисляется в соответствии с рис. 3.7.
В сегментном регистре в данном случае хранится не базовый (начальный) адрес сегментов, а коды селекторов, определяющие адреса в памяти, по которым хранятся дескрипторы (то есть описатели) сегментов. Область памяти с дескрипторами называется таблицей дескрипторов. Каждый дескриптор сегмента содержит базовый адрес сегмента, размер сегмента (от 1 до 64 Кбайт) и его атрибуты. Базовый адрес сегмента имеет разрядность 24 бит, что обеспечивает адресацию 16 Мбайт физической памяти.
Таким образом, на сумматор , вычисляющий физический адрес памяти, подается не содержимое сегментного регистра, как в предыдущем случае, а базовый адрес сегмента из таблицы дескрипторов.
Еще более сложный метод адресации памяти с сегментированием использован в процессоре Intel 80386 и в более поздних моделях процессоров фирмы Intel. Этот метод иллюстрируется рис. 3.8.
Адрес памяти (физический адрес) вычисляется в три этапа. Сначала вычисляется так называемый эффективный адрес (32-разрядный) путем суммирования трех компонентов: базы, индекса и смещения (Base, Index, Displacement ), причем возможно умножение индекса на масштаб (Scale). Эти компоненты имеют следующий смысл:
Затем специальный блок сегментации вычисляет 32-разрядный линейный адрес, который представляет собой сумму базового адреса сегмента из сегментного регистра с эффективным адресом. Наконец, физический 32-битный адрес памяти образуется путем преобразования линейного адреса блоком страничной переадресации, который осуществляет перевод линейного адреса в физический страницами по 4 Кбайта.
В любом случае сегментирование позволяет выделить в памяти один или несколько сегментов для данных и один или несколько сегментов для программ. Переход от одного сегмента к другому сводится всего лишь к изменению содержимого сегментного регистра. Иногда это бывает очень удобно. Но для программиста работать с сегментированной памятью обычно сложнее, чем с непрерывной, несегментированной памятью, так как приходится следить за границами сегментов, за их описанием, переключением и т.д.
3.1.3. Адресация байтов и слов
Многие процессоры, имеющие разрядность 16 или 32, способны адресовать не только целое слово в памяти (16-разрядное или 32-разрядное), но и отдельные байты. Каждому байту в каждом слове при этом отводится свой адрес.
Так, в случае 16-разрядных процессоров все слова в памяти (16-разрядные) имеют четные адреса. А байты, входящие в эти слова, могут иметь как четные адреса, так и нечетные.
Например, пусть 16-разрядная ячейка памяти имеет адрес 23420 , и в ней хранится код 2А5Е (рис. 3.9).
При обращении к целому слову (с содержимым 2А5Е ) процессор выставляет адрес 23420 . При обращении к младшему байту этой ячейки (с содержимым 5Е ) процессор выставляет тот же самый адрес 23420 , но использует команду, адресующую байт, а не слово. При обращении к старшему байту этой же ячейки (с содержимым 2А ) процессор выставляет адрес 23421 и использует команду, адресующую байт. Следующая по порядку 16-разрядная ячейка памяти с содержимым 487F будет иметь адрес 23422 , то есть опять же четный. Ее байты будут иметь адреса 23422 и 23423 .
Для различия байтовых и словных циклов обмена на магистрали в шине управления предусматривается специальный сигнал байтового обмена. Для работы с байтами в систему команд процессора вводятся специальные команды или предусматриваются методы байтовой адресации.
За последнюю неделю дважды объяснял людям как организована работа с памятью в х86, с целью чтобы не объяснять в третий раз написал эту статью.
И так, чтобы понять организацию памяти от вас потребуется знания некоторых базовых понятий, таких как регистры, стек и тд. Я по ходу попробую объяснить и это на пальцах, но очень кратко потому что это не тема для этой статьи. Итак начнем.
Как известно программист, когда пишет программы работает не с физическим адресом, а только с логическим. И то если он программирует на ассемблере. В том же Си ячейки памяти от программиста уже скрыты указателями, для его же удобства, но если грубо говорить указатель это другое представление логического адреса памяти, а в Java и указателей нет, совсем плохой язык. Однако грамотному программисту не помешают знания о том как организована память хотя бы на общем уровне. Меня вообще очень огорчают программисты, которые не знают как работает машина, обычно это программисты Java и прочие php-парни, с квалификацией ниже плинтуса.
Так ладно, хватит о печальном, переходим к делу.
Рассмотрим адресное пространство программного режима 32 битного процессора (для 64 бит все по аналогии)
Адресное пространство этого режима будет состоять из 2^32 ячеек памяти пронумерованных от 0 и до 2^32-1.
Программист работает с этой памятью, если ему нужно определить переменную, он просто говорит ячейка памяти с адресом таким-то будет содержать такой-то тип данных, при этом сам програмист может и не знать какой номер у этой ячейки он просто напишет что-то вроде:
int data = 10;
компьютер поймет это так: нужно взять какую-то ячейку с номером стопицот и поместить в нее цело число 10. При том про адрес ячейки 18894 вы и не узнаете, он от вас будет скрыт.
Все бы хорошо, но возникает вопрос, а как компьютер ищет эту ячейку памяти, ведь память у нас может быть разная:
3 уровень кэша
2 уровень кэша
1 уровень кэша
основная память
жесткий диск
Это все разные памяти, но компьютер легко находит в какой из них лежит наша переменная int data.
Этот вопрос решается операционной системой совместно с процессором.
Вся дальнейшая статья будет посвящена разбору этого метода.
Архитектура х86 поддерживает стек.
Стек это непрерывная область оперативной памяти организованная по принципу стопки тарелок, вы не можете брать тарелки из середины стопки, можете только брать верхнюю и класть тарелку вы тоже можете только на верх стопки.
В процессоре для работы со стеком организованны специальные машинные коды, ассемблерные мнемоники которых выглядят так:
push operand
помещает операнд в стек
pop operand
изымает из вершины стека значение и помещает его в свой операнд
Стек в памяти растет сверху вниз, это значит что при добавлении значения в него адрес вершины стека уменьшается, а когда вы извлекаете из него, то адрес вершины стека увеличивается.
Теперь кратко рассмотрим что такое регистры.
Это ячейки памяти в самом процессоре. Это самый быстрый и самый дорогой тип памяти, когда процессор совершает какие-то операции со значением или с памятью, он берет эти значения непосредственно из регистров.
В процессоре есть несколько наборов логик, каждая из которых имеет свои машинные коды и свои наборы регистров.
Basic program registers (Основные программные регистры) Эти регистры используются всеми программами с их помощью выполняется обработка целочисленных данных.
Floating Point Unit registers (FPU) Эти регистры работают с данными представленными в формате с плавающей точкой.
Еще есть MMX и XMM registers эти регистры используются тогда, когда вам надо выполнить одну инструкцию над большим количеством операндов.
Рассмотрим подробнее основные программные регистры. К ним относятся восемь 32 битных регистров общего назначения: EAX, EBX, ECX, EDX, EBP, ESI, EDI, ESP
Для того чтобы поместить в регистр данные, или для того чтобы изъять из регистра в ячейку памяти данные используется команда mov:
mov eax, 10
загружает число 10 в регистр eax.
mov data, ebx
копирует число, содержащееся в регистре ebx в ячейку памяти data.
Регистр ESP содержит адрес вершины стека.
Кроме регистров общего назначения, к основным программным регистрам относят шесть 16битных сегментных регистров: CS, DS, SS, ES, FS, GS, EFLAGS, EIP
EFLAGS показывает биты, так называемые флаги, которые отражают состояние процессора или характеризуют ход выполнения предыдущих команд.
В регистре EIP содержится адрес следующей команды, которая будет выполнятся процессором.
Я не буду расписывать регистры FPU, так как они нам не понадобятся. Итак наше небольшое отступление про регистры и стек закончилось переходим обратно к организации памяти.
Как вы помните целью статьи является рассказ про преобразование логической памяти в физическую, на самом деле есть еще промежуточный этап и полная цепочка выглядит так:
Логический адрес --> Линейный (виртуальный)--> Физический
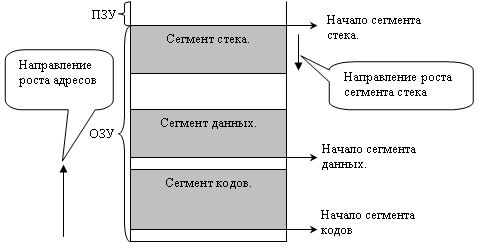
Все линейное адресное пространство разбито на сегменты. Адресное пространство каждого процесса имеет по крайней мере три сегмента:
Сегмент кода. (содержит команды из нашей программы, которые будут исполнятся.)
Сегмент данных. (Содержит данные, то бишь переменные)
Сегмент стека, про который я писал выше.
Линейный адрес вычисляется по формуле:
линейный адрес=Базовый адрес сегмента(на картинке это начало сегмента) + смещение
Сегмент кода
Базовый адрес сегмента кода берется из регистра CS. Значение смещения для сегмента кода берется из регистра EIP, в котором хранится адрес инструкции, после исполнения которой, значение EIP увеличивается на размер этой команды. Если команда занимает 4 байта, то значение EIP увеличивается на 4 байта и будет указывать уже на следующую инструкцию. Все это делается автоматически без участия программиста.
Сегментов кода может быть несколько в нашей памяти. В нашем случае он один.
Сегмент данных
Данные загружаются в регистры DS, ES, FS, GS
Это значит что сегментов данных может быть до 4х. На нашей картинке он один.
Смещение внутри сегмента данных задается как операнд команды. По дефолту используется сегмент на который указывает регистр DS. Для того чтобы войти в другой сегмент надо это непосредственно указать в команде префикса замены сегмента.
Сегмент стека
Используемый сегмент стека задается значением регистра SS.
Смещение внутри этого сегмента представлено регистром ESP, который указывает на вершину стека, как вы помните.
Сегменты в памяти могут друг друга перекрывать, мало того базовый адрес всех сегментов может совпадать например в нуле. Такой вырожденный случай называется линейным представлением памяти. В современных системах, память как правило так организована.
Теперь рассмотрим определение базовых адресов сегмента, я писал что они содержаться в регистрах SS, DS, CS, но это не совсем так, в них содержится некий 16 битный селектор, который указывает на некий дескриптор сегментов, в котором уже хранится необходимый адрес.
Так выглядит селектор, в тринадцати его битах содержится индекс дескриптора в таблице дескрипторов. Не хитро посчитать будет что 2^13 = 8192 это максимальное количество дескрипторов в таблице.
Вообще дескрипторных таблиц бывает два вида GDT и LDT Первая называется глобальная таблица дескрипторов, она в системе всегда только одна, ее начальный адрес, точнее адрес ее нулевого дескриптора хранится в 48 битном системном регистре GDTR. И с момента старта системы не меняется и в свопе не принимает участия.
А вот значения дескрипторов могут меняться. Если в селекторе бит TI равен нулю, тогда процессор просто идет в GDT ищет по индексу нужный дескриптор с помощью которого осуществляет доступ к этому сегменту.
Пока все просто было, но если TI равен 1 тогда это означает что использоваться будет LDT. Таблиц этих много, но использоваться в данный момент будет та селектор которой загружен в системный регистр LDTR, который в отличии от GDTR может меняться.
Индекс селектора указывает на дескриптор, который указывает уже не на базовый адрес сегмента, а на память в котором хранится локальная таблица дескрипторов, точнее ее нулевой элемент. Ну а дальше все так же как и с GDT. Таким образом во время работы локальные таблицы могут создаваться и уничтожаться по мере необходимости. LDT не могут содержать дескрипторы на другие LDT.
Итак мы знаем как процессор добирается до дескриптора, а что содержится в этом дескрипторе посмотрим на картинке:
Дескрипторы состоит из 8 байт.
Биты с 15-39 и 56-63 содержат линейный базовый адрес описываемым данным дескриптором сегмента. Напомню нашу формулу для нахождения линейного адреса:
линейный адрес = базовый адрес + смещение
[база; база+предел)
В зависимости от 55 G-бита(гранулярити), предел может измеряться в байтах при нулевом значении бита и тогда максимальный предел составит 1 мб, или в значении 1, предел измеряется страницами, каждая из которых равна 4кб. и максимальный размер такого сегмента будет 4Гб.
Для сегмента стека предел будет в интервале:
(база+предел; вершина]
Кстати интересно почему база и предел так рвано располагаются в дескрипторе. Дело в том что процессоры х86 развивались эволюционно и во времена 286х дескрипторы были по 8 бит всего, при этом старшие 2 байта были зарезервированы, ну а в последующих моделях процессоров с увеличением разрядности дескрипторы тоже выросли, но для сохранения обратной совместимости пришлось оставить структуру как есть.
Значение адреса «вершина» зависит от 54го D бита, если он равен 0, тогда вершина равна 0xFFF(64кб-1), если D бит равен 1, тогда вершина равна 0xFFFFFFFF (4Гб-1)
С 41-43 бит кодируется тип сегмента.
000 — сегмент данных, только считывание
001 — сегмент данных, считывание и запись
010 — сегмент стека, только считывание
011 — сегмент стека, считывание и запись
100 — сегмент кода, только выполнение
101- сегмент кода, считывание и выполнение
110 — подчиненный сегмент кода, только выполнение
111 — подчиненный сегмент кода, только выполнение и считывание
44 S бит если равен 1 тогда дескриптор описывает реальный сегмент оперативной памяти, иначе значение S бита равно 0.
Самым важным битом является 47-й P бит присутствия. Если бит равен 1 значит, что сегмент или локальная таблица дескрипторов загружена в оперативку, если этот бит равен 0, тогда это означает что данного сегмента в оперативке нет, он находится на жестком диске, случается прерывание, особый случай работы процессора запускается обработчик особого случая, который загружает нужный сегмент с жесткого диска в память, если P бит равен 0, тогда все поля дескриптора теряют смысл, и становятся свободными для сохранения в них служебной информации. После завершения работы обработчика, P бит устанавливается в значение 1, и производится повторное обращение к дескриптору, сегмент которого находится уже в памяти.
На этом заканчивается преобразование логического адреса в линейный, и я думаю на этом стоит прерваться. В следующий раз я расскажу вторую часть преобразования из линейного в физический.
А так же думаю стоит немного поговорить о передачи аргументов функции, и о размещении переменных в памяти, чтобы была какая-то связь с реальностью, потому размещение переменных в памяти это уже непосредственно, то с чем вам приходится сталкиваться в работе, а не просто какие-то теоретические измышления для системного программиста. Но без понимания, как устроена память невозможно понять как эти самые переменные хранятся в памяти.
В общем надеюсь было интересно и до новых встреч.
Мне периодически приходится объяснять разным людям некоторые аспекты архитектуры Intel® IA-32, в том числе замысловатость системы адресации данных в памяти, которая, похоже, реализовала почти все когда-то придуманные идеи. Я решил оформить развёрнутый ответ в этой статье. Надеюсь, что он будет полезен ещё кому-нибудь.
При исполнении машинных инструкций считываются и записываются данные, которые могут находиться в нескольких местах: в регистрах самого процессора, в виде констант, закодированных в инструкции, а также в оперативной памяти. Если данные находятся в памяти, то их положение определяется некоторым числом — адресом. По ряду причин, которые, я надеюсь, станут понятными в процессе чтения этой статьи, исходный адрес, закодированный в инструкции, проходит через несколько преобразований.

На рисунке — сегментация и страничное преобразование адреса, как они выглядели 27 лет назад. Иллюстрация из Intel 80386 Programmers's Reference Manual 1986 года. Забавно, что в описании рисунка есть аж две опечатки: «80306 Addressing Machanism». В наше время адрес подвергается более сложным преобразованиям, а иллюстрации больше не делают в псевдографике.
Начнём немного с конца — с цели всей цепочки преобразований.
Физический адрес
Конечный результат всех преобразований других типов адресов, перечисленных далее в этой статье — физический адрес. На нём кончается работа внутри центрального процессора по преобразованию адресов.
На самом деле, легко понять, что это ещё не конец. В платформе, которая должна обработать запрос данных от процессора, может быть несколько чипов DRAM, имеющих собственную структуру разбиения на блоки, а также различные периферийные устройства, отображённые на общее пространство физической памяти. Дальнейший путь транзакции с некоторым физическим адресом будет зависеть от конфигурации нескольких декодеров, находящихся на её пути внутри устройств платформы.
Эффективный адрес
Эффективный адрес — это начало пути. Он задаётся в аргументах индивидуальной машинной инструкции, и вычисляется из значений регистров, смещений и масштабирующих коэффициентов, заданных в ней явно или неявно.
Например, для инструкции (ассемблер в AT&T-нотации)
addl %eax, 0x11(%ebp, %edx, 8)
эффективный адрес операнда-назначения будет вычислен по формуле:
eff_addr = EBP + EDX * 8 + 0x11
Логический адрес
Без знания номера и параметров сегмента, в котором указан эффективный адрес, последний бесполезен. Сам сегмент выбирается ещё одним числом, именуемым селектором. Пара чисел, записываемая как selector:offset , получила имя логический адрес. Так как активные селекторы хранятся в группе специальных регистров, чаще всего вместо первого числа в паре записывается имя регистра, например, ds:0x11223344.
Здесь обычно у тех, кто столкнулся с этими понятиями впервые, голова начинает идти кругом. Несколько упростить (или усложнить) ситуацию помогает тот факт, что почти всегда выбор селектора (и связанного с ним сегмента) делается исходя из «смысла» доступа. По умолчанию, если в кодировке машинной инструкции не сказано иного, для получения адресов кода используются логические адреса с селектором CS, для данных — с DS, для стека — с SS.
Линейный адрес
Эффективный адрес — это смещение от начала сегмента — его базы. Если сложить базу и эффективный адрес, то получим число, называемое линейным адресом:
lin_addr = segment.base + eff_addr
Преобразование логический → линейный не всегда может быть успешным, так как при его исполнении проверяется несколько условий на свойства сегмента, записанных в полях его дескриптора. Например, проверяется выход за границы сегмента и права доступа.
Описанное выше верно при включенной сегментации. В 16-битном реальном режиме смысл селекторов другой, они хранят только базу, а преобразование не осуществляет сегментных проверок. Фактически, обозначения CS, DS, FS, GS, ES, SS имеют совершенно разный смысл в этих двух режимах, что добавляет путаницы.
Сегментация была модной на некотором этапе развития вычислительной техники. В настоящее она почти всюду была заменена другими механизмами, и используется только для специфических задач. Так, в режиме IA-32e (64-битном) только два сегмента могут иметь ненулевую базу. Для остальных четырёх в этом режиме всегда линейный адрес == эффективный.
Что такое виртуальный адрес?
В литературе и в документации других архитектур встречается ещё один термин — виртуальный адрес. Он не используется в документации Intel на IA-32, однако встречается, например, в описании Intel® Itanium, в котором сегментация не используется. Можно смело считать, что для IA-32 виртуальный == линейный.
В советской литературе по вычислительной технике этот вид адресов также именовался математическим.
Страничное преобразование
Следующее после сегментации преобразование адресов: линейный → физический — имеет множество вариаций в своём алгоритме, в зависимости от того, в каком режиме (32-битном, PAE или 64-битном) находится процессор.
Примечательно, сколько различных бит из разных системных регистров процессора влияют на процесс страничного преобразования в настоящее время. Я просмотрел свежую сентябрьскую редакцию Intel SDM [1], и вот полный список: CR0.WP, CR0.PG, CR4.PSE, CR4.PAE, CR4.PGE, CR4.PCIDE, CR4.SMEP, CR4.SMAP, IA32_EFER.LME, IA32_EFER.NXE, EFLAGS.AC.
Однако общая идея всегда одна и та же: линейный адрес разбивается на несколько частей, каждая из которых служит индексом в одной из системных таблиц, хранящихся в памяти. Записи в таблицах — это адреса начала таблицы следующего уровня или, для последнего уровня — искомая информация о физическом адресе страницы в памяти и её свойствах. Самые младшие биты не преобразуются, а используются для адресации внутри найденной страницы. Например, для режима PAE с размером страниц 4 кбайт преобразование выглядит так:

В разных режимах процессора различается число и ёмкость этих таблиц. Преобразование может завершиться неудачей, если очередная таблица не содержит валидных данных, или права доступа, хранящиеся в последней из них, запрещают доступ к странице; например, при записи в регионы, помеченные как «только для чтения», или попытке чтения памяти ядра из непривилегированного процесса.
Гостевой физический
До введения возможностей аппаратной виртуализации в процессорах Intel страничное преобразование было последним в цепочке. Когда же на одной системе работают несколько виртуальных машин, то физические адреса, получаемые в каждой из них, приходится транслировать ещё один раз. Это можно делать программным образом, или же аппаратно, если процессор поддерживает функциональность EPT (англ. Extended Page Table). Адрес, раньше называвшийся физическим, был переименован в гостевой физический для того, чтобы отличать его от настоящего физического. Они связаны с помощью EPT-преобразования. Алгоритм последнего схож с ранее описанным страничным преобразованием: набор связанных таблиц с общим корнем, последний уровень которых определяет, существует ли физическая страница для указанной гостевой физической.
Полная картина
Я попытался собрать все преобразования адреса в одну иллюстрацию. В ней преобразования обозначены стрелками, типы адресов обведены в рамки.

Как уже было сказано выше, каждое из преобразований может вернуть ошибку для адресов, не имеющих представления в следующем по цепочке виде. Устранение подобных проблем — это задача операционных систем и мониторов виртуальных машин, реализующих абстракцию виртуальной памяти.
Заключение
Эволюция, что в природе, что в технике — странная вещь. Она порождает неожиданные структуры, необъяснимые с точки зрения рационального проектирования. Её творения полны атавизмов, правила их поведения иногда почти полностью состоят из исключений. Для того, чтобы понять работу такой системы, часто требуется прокрутить её эволюцию с самого начала, и под нагромождениями всех слоёв найти истину в виде принципа: «ничего не выбрасывать». Я склонен считать архитектуру IA-32 замечательным примером эволюционного развития.
Вскоре после завершения написания этой статьи я натолкнулся на презентацию об архитектуре IBM System z, которая примечательна в том числе своей долгой и интересной историей поддержки виртуализации. В этом документе нашлось перечисление всех типов адресов памяти, используемых в System z:
В предыдущем уроке мы рассмотрели работу с битовыми операциями и двоичными числами, тем самым заложив основу для рассмотрения новой темы. В этом уроке мы с Вами рассмотрим очередной вопрос: что такое регистры и как с ними работать?

Память и регистры
Одним из самых важных навыков необходимых при работе с микроконтроллерами является умение взаимодействовать с регистрами. Давайте для себя разберемся, что же это такое?
В целом, регистр — это особый вид памяти внутри микроконтроллера, который используется для управления процессором и периферийными устройствами. Каждый регистр в архитектуре ARM представляет собой ячейку памяти и имеет длину в 32 бита, где каждый бит можно представить в виде крошечного выключателя с помощью которого осуществляется управление тем или иным параметром микроконтроллера.
Каждый из регистров имеет свой порядковый номер – адрес. Адрес регистра обозначается 32-битным числом представленным в шестнадцатеричной системе счисления. Путём записи по адресу регистра определённой комбинации единиц и нулей, которые обычно представлены в шестнадцатеричном виде, осуществляется настройка и управление тем или иным узлом в МК. Вспомним, что в программе для работы с битовыми операциями, мы могли представить в виде шестнадцатеричного числа произвольный набор единиц и нулей. В целом стоит отметить, что существует два вида регистров: регистры общего назначения и специальные регистры. Первые расположены внутри ядра МК, а вторые являются частью RAM-памяти.
Так же стоит отметить, что Reference Manual, который мы скачивали в первом уроке, это один большой справочник по регистрам, содержащимся в целевом микроконтроллере, а библиотека CMSIS позволяет нам оперировать символьными именами регистров вместо числовых адресов. Например, к регистру 0x40011018 мы можем обратиться просто, используя символьное имя GPIOC_BSSR. Конкретные примеры конфигурирования мы рассмотрим в ходе разбора нашей программы из первого занятия.
Итак, обычно структура регистра описывается в виде небольшой таблицы с указанием:
- Названия регистра и описания его назначения
- Адреса регистра или смещением относительно базового адреса
- Значения по умолчанию после сброса
- Типа доступа к ячейкам регистра (чтение, запись, чтение/запись)
- Значения и описания параметров записываемых битов
Разбор кода из первого занятия
Итак, давайте вспомним задачу, которую мы решили на первом уроке используя готовый код примера: нам было необходимо написать программу, которая бы обеспечила попеременное включение двух светодиодов на плате Discovery (возможно и не двух, если у вас другая версия платы Discovery) с временным интервалом.
Давайте еще разок взглянем на код программы, которую мы использовали для того, чтобы заставить наш МК дрыгать двумя ногами на которых расположены наши светодиоды:
Первым делом, при работе с STM32, даже для такой простой задачи как включение и выключение светодиода нам необходимо предварительно ответить на ряд вопросов:
- Куда подключены наши светодиоды? К какому выводу микроконтроллера?
- Как включить тактирование на нужный порт GPIO?
- Как настроить, нужные нам, пины порта GPIO для того чтобы можно было включить светодиод?
- Как включить и выключить светодиод?
Куда подключены наши светодиоды? К какому выводу микроконтроллера?
Для того, чтобы посмотреть где что находится на плате Discovery, а в частности, нужные нам светодиоды — нужно открыть Schematic-файл, либо тот который мы скачали с сайта ST, либо прямо из Keil:

Открыв Schematic мы увидим схему всего того, что есть на плате — схему ST-Link, обвязку всей периферии и многое другое. На текущий момент нас интересуют два светодиода, ищем их обозначение:

Как мы видим, наши светодиоды подключены к порту GPIOC на 8 и 9 пин.
Как включить тактирование на нужный порт GPIO?
В целом, любая работа с периферией в микроконтроллерах STM32 сводится к стандартной последовательности действий:
- Включение тактирования соответствующего периферийного модуля. Осуществляется это через регистр RCC путем подачи тактового сигнала напрямую с шины на которой находится данный модуль. По умолчанию тактирование всей периферии отключено для минимизации энергопотребления.
- Настройка через управляющие регистры, путем изменения параметров специфичных для конкретного периферийного устройства
- Непосредственный запуск и использование результатов работы модуля
Внимание! Вопрос касательно системы тактирования, её настройки и использования мы подробно рассмотрим в отдельной статье.
Найти к какой шине подключен наш порт GPIOC можно найти в Datasheet'е на наш МК в разделе Memory Mapping в Таблице 16. STM32F051xx peripheral register boundary addresses.

Как вы уже успели заметить, необходимая нам шина именуется как AHB2. Для того чтобы подробнее ознакомиться с регистром, в котором включается тактирование на нужный нам порт GPIO на шине AHB, надо перейти в соответствующий раздел в Reference Manual. По названию регистров мы можем определить тот, который нужен нам:

Переходим в этот пункт, и мы видим наш 32-битный регистр, его адрес смещения, значение по умолчанию, способ доступа к регистру и перечисление того, за что отвечает каждый бит в регистре.

Смотрим на таблицу и видим нечто напоминающее опции включения тактирования на портах GPIO. Переходим к описанию и находим нужную нам опцию:

Соответственно если мы установим 19 бит в значение «1» то это обеспечит включение тактирования на порт I/O C – то есть на наш GPIOC. К тому же — нам нужно включить отдельно один бит из группы, не затрагивая остальные т.к. мы не должны мешать и изменять без надобности другие настройки.
Основываясь на материалах прошлого урока, мы знаем что для того чтобы выставить определенный бит нужно используя логическую операцию «ИЛИ» сложить текущее значение регистра с маской которая содержит те биты которые необходимо включить. Например, сложим значение регистра RCC->AHBENR по умолчанию, т.е. 0x14 и число 0x80000 тем самым включим тактирование GPIOC путем установки 19 бита:

Каким образом мы можем это сделать из программы? Всё достаточно просто. В данном случае у нас два варианта:
- Запись в регистр напрямую численного значения регистра напрямую через его адрес.
- Настройка с использованием библиотеки CMSIS
То есть, мы могли бы обращаться к адресам регистров напрямую по адресу и написать так:
Второй вариант мне кажется наиболее привлекательным, т.к. библиотека CMSIS организована таким способом, что регистру можно обращаться, используя только его название. Препроцессор в ходе обработки текста программы перед компиляцией подставит все цифровые значения адреса регистра автоматически. Давайте разберем этот вопрос чуть подробнее.
Предлагаю открыть наш проект, который мы сделали в первом занятии, или скачайте предварительно подготовленый отсюда и удалите все содержимое программы оставив только подключенный заголовочный файл, функцию main() и инструкцию для включения тактирования (она нам понадобится для подробного разбора кода).
Наш код будет выглядеть следующим образом:
Давайте для ознакомления копнём вглубь библиотеки CMSIS.
Для того, чтобы быстро перейти к месту где объявлена та или иная константа или переменная в Keil реализована удобная функция. Кликаем правой кнопкой по необходимой нам константе, например, на RCC:

И мы переносимся в глубины библиотеки CMSIS, в которой увидим, что все регистры доступные для управления программным способом имеют вид TypeDef-структур, в том числе и наш RCC:

Провалившись подобным образом в RCC_TypeDef мы увидим структуру в которой описаны все поля нашего регистра:

Соответственно, мы можем спокойно обращаться к нужному нам регистру записью вида PERIPH_MODULE->REGISTER и присваивать ему определенное значение.
Помимо мнемонического обозначения регистров есть так же обозначения конкретных битов. Если мы провалимся к объявлению параметра RCC_AHBENR_GPIOCEN из нашей программы, то так же увидим объявление всех параметров:

Таким образом, используя библиотеку CMSIS у нас получается лаконичная читаемая запись нужного нам параметра в регистр, через установку которого мы запускаем тактирование на нужный нам порт:
В качестве задания: определите используя возможности Keil, каким образом получился адрес регистра RCC->AHBENR как 0x40021014.
Как настроить нужные нам пины GPIO для того чтобы можно было включить светодиод?
Итак, мы знаем что нужные нам светодиоды подключены к порту GPIOC к пинам PC8 и PC9. Нам нужно настроить их в такой режим, чтобы загорался светодиод. Хотелось бы сразу же сделать оговорку, что порты GPIO мы рассмотрим подробнее в другой статье и тут мы сконцентрируемся именно на работе с регистрами.
Первым делом нам нужно перевести режим работы пинов PC8 и PC9 в режим Output. Остальные параметры порта можно оставить по умолчанию. Переходим в Reference Manual в раздел 9. General-purpose I/Os (GPIO) и открываем пункт отвечающий за режим работы пинов порта GPIO и видим что за этот параметр отвечает регистр MODER:

Судя по описанию, для установки пинов PC8 и PC9 в режим Output мы должны записать 01 в соответствующие поля регистра GPIOC.
Это можно сделать через прямую установку с помощью числовых значений:
-
Формируем число для записи:

После данной инструкции наши пины PC8 и PC9 перейдут в режим Output.
Как включить светодиод?
Если мы обратим внимание на список доступных регистров для управления портом GPIO то можем увидеть регистр ODR:

Каждый из соответствующих битов отвечает за один из пинов порта. Его структуру вы можете увидеть ниже:

Для того, чтобы обеспечить попеременную смену состояний светодиодов надо с определенным временным интервалом включать/выключать 8 и 9 биты. То есть попеременно присваивать регистру значение 0x100 и 0x200.
Сделать это мы можем через прямое присвоение значений регистру:
Можем через использование определений из библиотеки:
Но так как микроконтроллер работает очень быстро — мы не будем замечать смены состояний светодиодов и визуально будет казаться что они оба горят постоянно. Для того чтобы они действительно моргали попеременно мы внесем искусственную задержку в виде цикла который займет МК бесполезными вычислениями на некоторое время. Получится следующий код:
На этом первоначальное знакомство с регистрами и методами работы с ними мы можем закончить.
Проверка результатов работы нашего кода
Небольшое приятное дополнение в конце статьи: в Keil имеется отличный Debug-инструмент с помощью которого мы можем пошагово выполнить нашу программу и просмотреть текущее состояние любого периферийного блока. Для этого после загрузки прошивки после компиляции мы можем нажать кнопку Start Debug Session:

Рабочая среда Keil переключится в режим отладки. Мы можем управлять ходом программы с помощью данных кнопок:

И есть еще одна удобная функция работы с периферией в режиме отладки, она позволяет просматривать текущее состояние регистров и менять их состояние простым кликом мышкой.
Для того чтобы ей воспользоваться — нужно перейти в соответствующий периферийный блок и справа откроется окно с указанием регистров и их значением.

Если вы кликните по одному из пунктов данного меню, вы увидите адрес регистра и его краткое описание. Так же можно просмотреть описание к каждому отдельному параметру регистра:

Попробуйте самостоятельно пошагово выполнить программу, включить/выключить светодиоды не используя программу, а используя данный режим работы с микроконтроллером. Простор для фантазии тут обширный. Так же попробуйте поиграться с длительностями задержек, сделайте одновременное моргание обоими светодиодами. В общем экспериментируйте! )
Аннотация: Цель лекции: рассмотреть состав, назначение и особенности использования различных групп регистров, входящих в состав универсального микропроцессора. Состав, структура и назначение регистров микропроцессора являются важной чертой его архитектуры и во многом определяют его функциональные возможности. Поэтому изучение этого вопроса весьма важно для понимания дальнейшего материала.
Регистровая структура универсального микропроцессора
В универсальном 32-разрядном микропроцессоре выделяют следующие группы регистров:
- основные функциональные регистры;
- регистры процессора с плавающей точкой;
- системные регистры;
- регистры отладки и тестирования.
Первые две группы регистров используются прикладными программами, последние две группы - системными программами , имеющими наивысший уровень привилегий .
Рассмотрим каждую из этих групп подробнее.
Основные функциональные регистры
В состав регистров этой группы входят:
- регистры общего назначения;
- регистр указателя команд;
- регистр флагов ;
- сегментные регистры .
Состав и структура регистров общего назначения представлены на рис. 2.1.
Блок состоит из восьми 32-разрядных регистров. К каждому из них можно обращаться как к одному двойному слову (32 разряда).

Все эти регистры используются для хранения промежуточных результатов вычислений и составных частей адреса при различных режимах адресации операндов, расположенных в памяти.
Кроме того, ряд регистров этого блока имеют свое, присущее только им назначение:
- EAX/AX/AL - регистр-аккумулятор, используется для сокращения длины команды при работе с непосредственными операндами;
- AX/AL - приемник (источник) данных в командах ввода (вывода) данных из (в) внешнего устройства;
- DX - определяет адрес ВУ в командах ввода (вывода) данных;
- ECX - используется в качестве счетчика циклов в командах циклов ;
- BP , SP - используются при работе со стеком;
- ESI , EDI ( DI , SI ) - определяют положение строк в памяти в командах обработки строк.
Регистр указателя команд и регистр флагов имеют длину 32 разряда.
Младшее слово каждого из этих регистров (разряды 0-15) функционально соответствует аналогичным разрядам в 16-разрядном микропроцессоре (рис. 2.2).

Регистр указателя команд EIP хранит смещение адреса команд относительно начала сегмента кода (сегмента команд).
Регистр флагов EFLAGS содержит признаки результата выполненной команды, а также разряды, управляющие работой микропроцессора: обработкой маскированных прерываний, последовательностью вызываемых задач, вводом-выводом и рядом других действий. Из этих флагов рассмотрим только наиболее значимые и интересные с точки зрения дальнейшего изучения работы микропроцессора.
К битам состояния регистра флагов относятся:
- ZF - признак нуля результата ( ZF = 1 , если все разряды результата равны 0);
- SF - знак результата ( SF = 1 , если старший разряд результата равен 1, то есть если результат отрицательный);
- OF - признак переполнения ( OF = 1 , если при выполнении арифметических операций над числами со знаком происходит переполнение разрядной сетки);
- CF - флаг переноса ( CF = 1 , если выполнение операции сложения приводит к переносу за пределы разрядной сетки), устанавливается также в некоторых других операциях;
- PF - признак четности (дополняет до нечетного числа единиц младший байт результата);
- AF - флаг полупереноса (используется при операциях над двоичнодесятичными числами);
- DF - устанавливается пользователем и определяет порядок обработки строк символов в соответствующих командах: декремент (при DF = 1 ) или инкремент (при DF = 0 ) содержимого индексных регистров ESI , EDI ( SI , DI ) после обработки одного символа.
В состав флагов управления входят:
- IF - флаг прерываний (при IF = 1 разрешается обработка маскированных аппаратных прерываний );
- TF - флаг ловушки , или трассировки (при ТF = 1 после выполнения каждой команды возникает прерывание, используемое отладчиками;);
- NТ - бит вложенной задачи (показывает, что данная задача была вызвана из другой программы, аналогично подпрограмме, и возврат из этой задачи должен проводиться по механизму переключения задач);
- IOPL - 2-разрядное поле уровня привилегий ввода/вывода (определяет уровень привилегий программ, которым разрешено выполнение операции ввода-вывода);
- VM - режим виртуального микропроцессора i8086 (при работе микропроцессора в защищенном режиме установка VM = 1 вызывает переключение в режим виртуального микропроцессора i8086; в этом случае микропроцессор функционирует как быстрый МП i8086, но реализует механизмы защиты памяти , страничной адресации и ряд других дополнительных возможностей; бит VM может быть установлен только в защищенном режиме).
Блок сегментных регистров состоит из шести 16-разрядных регистров, которые указывают на различные сегменты , расположенные в памяти компьютера:
- CS ( Code Segment ) - сегмент кода программы;
- DS ( Data Segment ) - сегмент данных;
- SS ( Stack Segment ) - сегмент стека;
- ES , FS , GS - дополнительные сегменты данных.
При работе микропроцессора в реальном режиме в сегментном регистре содержатся старшие 16 разрядов 20-разрядного базового адреса сегмента. Физический адрес начала сегмента получается умножением этой величины на 16:

Получающийся 20-разрядный адрес позволяет адресовать память емкостью 2 20 байт = 1 Мбайт. При этом сегменты имеют постоянную длину 2 16 байт . Разработчики первых персональных компьютеров полагали, что оперативная память , большая чем 1 Мбайт, никогда не потребуется пользователю, поэтому вся архитектура строилась исходя именно из этого положения.
При переходе к 32-разрядной архитектуре стало необходимым обеспечить возможность адресации памяти емкостью до 2 32 байт . Кроме того, введение защищенного режима работы микропроцессора потребовало хранения большого количества дополнительной информации о сегменте: его длине, которая стала переменной, уровне привилегий, его типе и т. д. Простое увеличение разрядности сегментных регистров до 32 бит не обеспечило бы возможности хранения всей этой информации. Поэтому все данные о сегменте стали размещаться в специальных структурах - дескрипторах (описателях) сегментов, которые хранятся в таблицах дескрипторов, расположенных в памяти, а сегментные регистры , сохранив свою первоначальную длину в 16 разрядов, содержат так называемый селектор ( указатель ), который используется для того, чтобы найти нужный дескриптор в этих таблицах.
Читайте также: