
Замена тактового генератора на материнской плате
Материнская (системная, основная) плата – motherboard – является основой платой системного блока и компьютера в целом, определяя вместе с процессором архитектуру и производительность компьютера. Не многие уделяют должное внимание выбору материнской платы (МВ, МП), хотя она является важнейшим связующим звеном между компонентами компьютера и управляет единой синхронизированной работой всех подсистем. Несмотря на большое разнообразие в дизайне и исполнении, все материнские платы имеют схожие черты. Так, на любой из них обязательно устанавливаются следующие компоненты: процессор и сопроцессор; память ROM, RAM и SRAM; схемы ввода/вывода; схемы интерфейсов и шин, кварцевый генератор, схемы управления напряжением. Кроме того, возможна установка большого количества интерфейсных контроллеров (микросхемы для согласования и обмена данными) различных стандартов, таких как IDE, Floppy, SCSI, контроллеры (адаптеры) портов. Главным набором микросхем (СБИС) в современных материнских платах является чипсет, который управляет работой всех остальных контроллеров и компонентов, согласуя их работу во времени. Именно тип чипсета определяет возможные подключаемые интерфейсы и компоненты, а также производительность. Т.о. существует большое количество типов и разновидностей контроллеров и устройств, подключаемых к ним и материнская плата, которая состоит из этих наборов БИС, и чтобы понять как они работают и взаимодействуют необходимо разобраться, из чего конкретно состоит материнская плата.
5. Современные системы. Нажми на кнопку – получишь результат.
Понятия "частота шины" и "множитель", рассмотренные выше, благополучно дожили
до наших дней, изменились только численные значения этих параметров. Современная
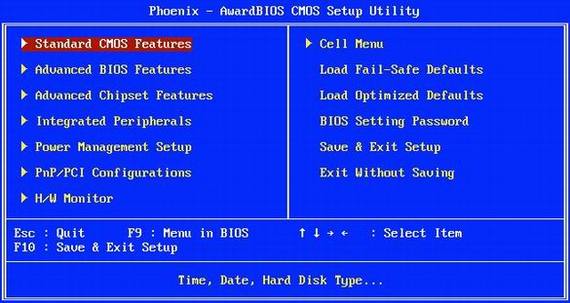
платформа позволяет управлять тактовой частотой процессора и множителем из BIOS
Setup. Читателю, знакомому с цифровой и микропроцессорной схемотехникой,
очевиден путь решения этой задачи: код управления частотой, подаваемый на
тактовый генератор и код управления множителем, подаваемый на процессор
формируется посредством программно-доступных регистров (портов вывода), выходы
которых подключены к соответствующим управляющим линиям. Записывая данные в эти
регистры, BIOS, либо другая программа, может устанавливать требуемые значения
частоты и множителя. Архитектура регистров, реализующих данную функцию, зависит
от модели платформы, поэтому программы, реализующие такое управление, могут быть
написаны под одну конкретную плату (как пишется BIOS), либо они должны
распознавать тип платы и содержать модули поддержки под каждую плату.
В большинстве реализаций современных платформ, тактовый генератор выполнен в
виде отдельной микросхемы, программный доступ к его регистрам обеспечивается по
2-проводной последовательной шине SMB (System Management Bus). Заметим, что та
же шина используется для считывания микросхем SPD (Serial Presence Detect)
хранящих параметры модулей оперативной памяти. Контроллер шины SMB находится в
составе "южного моста" чипсета. Детальное описание шины SMB содержится в [17].
Информацию по контроллеру шины SMB можно найти в документации на "южные мосты"
чипсетов, например [10], [19], [20]. Документация на большинство тактовых
генераторов также доступна, например [21]. Шина SMB построена на базе протокола
I2C, предложенного фирмой Philips.
Важным свойством современных платформ является автоматическое определение
тактовой частоты процессора. Для этого процессор сам формирует код управления
частотой системной шины. Этот код жестко прошит в процессоре в соответствии с
его типом (не путать с множителем). Код подается от процессора на тактовый
генератор и управляет режимом работы последнего. Процессоры семейства Intel
Socket 775 используют сигналы BSEL[0,1,2] для выбора частоты системной шины.
BSEL расшифровывается как Bus Select.
Каким же образом автоматический выбор частоты в соответствии с типом
процессора и управление частотой из BIOS Setup существуют совместно?
Итак, мы включили питание, тактовый генератор принял от процессора код
управления частотой по линиям BSEL[2,1,0] и автоматически запустился на частоте,
соответствующей установленному процессору. Процессор начал выполнение стартовой
процедуры BIOS POST на штатной частоте. Затем, BIOS на одном из этапов
выполнения процедуры POST, интерпретирует содержимое памяти CMOS, в которой
хранится информация о состоянии опций Setup. Если в Setup установлена частота,
отличающаяся от штатной, BIOS перепрограммирует тактовый генератор, и он
запустится на новой частоте. Физически, это сводится к выполнению транзакций на
шине SMB, записывающих данные в регистры тактового генератора.
Именно так приводятся в исполнение установки BIOS Setup. Прежде чем выполнить
перенастройку тактового генератора, чипсета и других устройств в соответствии с
установками опций, BIOS проверяет контрольную сумму информации CMOS, а также
бит, индицирующий факт потери батарейного питания. Если выясняется, что
информация в CMOS недостоверна, перепрограммирования частоты не происходит,
процессор продолжает работать на штатной частоте. На этом основано действие
перемычки Clear CMOS, которая позволяет сбросить настройки Setup и запуститься в
штатном режиме, если плата не стартует после чрезмерного разгона.
3. Платформы PC/AT 486. Первые процессоры с умножением частоты.
В процессорах класса 486 впервые появилось понятие "множитель". Например,
процессор 80486DX2-50 тактировался от частоты 25 MHz, на этой частоте работала
шина. Внутри процессора происходило умножение частоты тактового сигнала на 2, и
ядро работало на частоте 50 MHz. Разумеется, этот процессор работает медленнее,
чем 80486DX-50, у которого и шина и ядро тактируются от 50 MHz. Тогда почему же
разработчики приняли такое решение? Дело тут в том, что технологических
возможностей для роста частоты ядра значительно больше, чем для роста частоты
шины. Цепи системной шины реализованы в виде проводников на плате, соединяющих
процессор и "северный мост" чипсета. Цепи ядра реализованы внутри кристалла
процессора, здесь физическая длина проводников и количество буферных элементов,
через которые проходят сигналы, значительно меньше. Чтобы максимально
реализовать разгонные потенциалы, как ядра, так и шины, их требовалось запустить
на разных частотах, что и было сделано путем введения механизма умножения
частоты, который успешно применяется и в современных процессорах. Для
процессоров поколения 486 были достигнуты частоты 50 MHz (для шины) и 133MHz
(для ядра). Приведены штатные значения, без учета экспериментов по разгону.
Заметим, что переключатели задания частоты шины подключены к управляющим
входам тактового генератора, так как он вырабатывает частоту, а переключатели
задания множителя – к управляющим входам процессора, так как умножение
происходит внутри процессора.
Книги
22) В.Л. Григорьев. Микропроцессор i486. Архитектура и программирование.
Москва ТОО "ГРАНАЛ" 1993.
23) В.Г. Артюхов, А.А. Будняк. В.Ю. Лапий. С.М. Молявко, А.И. Петренко.
Проектирование микропроцессорной электронно-вычислительной аппаратуры.
Справочник. Киев "Тэхника" 1988.
24) К. Г. Самофалов, О.В. Викторов. Микропроцессоры. Библиотека инженера. Киев
"Тэхника" 1989.
25) 2B ProGroup: В.А. Вегнер, А.Ю. Крутяков, В.В. Серегин, В.А. Сидоров, А.В.
Спесивцев. Аппаратура персональных компьютеров и ее программирование. IBM
PC/XT/AT и PS/2. Москва "Радио и связь" 1995.
26) Ю.М. Казаринов, В.Н. Номоконов, Г.С. Подклетнов, Ф.В. Филиппов.
Микропроцессорный комплект К1810. Структура, программирование, применение.
Справочная книга. Москва "Высшая школа" 1990.
Поддержание адекватного температурного режима в современном компьютере – тема
отдельной статьи. Особенно, если этот компьютер разогнан. Вместе с тем, есть
один аспект, имеющий отношение, как к тактированию, так и к температурному
режиму. Процессоры Intel (начиная от Pentium 4) и AMD (начиная от Athlon 64)
поддерживают усовершенствованные механизмы управления температурным режимом,
позволяющие не только отключать процессор, когда продолжение работы чревато
физическим разрушением кристалла из-за перегрева, но и не допускать приближения
к данной критической точке. Для этого используется два температурных порога:
Первый – это температура, при которой начинается вмешательство системы
управления с целью понижения температуры процессора. Вмешательство выражается в
снижении тактовой частоты (если быть точным, то происходит периодический пропуск
определенного количества тактов, а не снижение частоты). Второй порог
достигается, если вмешательство системы управления не привело к результату,
процессор нагрелся до температуры, при которой существует опасность разрушения
кристалла, поэтому необходимо аварийное выключение. Значения температур для
первого и второго порогов зависят от модели процессора. Например, для
процессоров класса Intel Pentium 4 (Prescott) типовые значения порогов
соответственно 70 и 90 градусов Цельсия (рекомендуется уточнять эту информацию,
используя Data Sheet на конкретный процессор). Таким образом, при описанном выше
алгоритме управления, результатом перегрева процессора может стать не только
самопроизвольное выключение компьютера или периодические сбои, но и снижение
тактовой частоты и как следствие - производительности. Для контроля температуры
процессора и других параметров, можно использовать экран Hardware Monitoring в
BIOS Setup или утилиты мониторинга, запускаемые в сеансе ОС. Второе может
оказаться предпочтительнее, если существуют подозрение, что температура
процессора недопустимо возрастает только при запуске определенных ресурсоемких
приложений.
Из чего же она состоит?
Конечно же, всем известно, что основой любой материнской платы является чипсет, но об этом чуть попозже – для начала следует определиться с физической структурой и электрической начинкой МП.
Печатная плата
Итак, материнская плата представляет из себя печатную плату с разводкой – PCB [Printed Circuit Board] – на которой смонтированы все элементы. PCB обычно состоит из 4 слоев, состоящих из плоских камедевых пластин, между которыми находятся элементы цепи – пропаянные соединительные дорожки. Два слоя, которые находятся сверху и снизу являются сигнальными слоями. Два слоя, которые находятся посередине используются как заземление и разводка питания. Путем помещения пластин питания и заземления в центр, достигается коррекция и защита сигнала.
Для некоторых МВ требуется шесть слоев. Это касается МП для двухпроцессорных систем или же МП для процессоров с более чем 425 контактами. Pentium 4 (478 контактов) и Athlon XP (462 контакта) потребляют большое количество энергии, поэтому качественная разводка МП особенно важна. Шестислойная разводка делается для того, чтобы предотвратить перекрестные помехи между сигнальными слоями, и дополнительные слои решают эту проблему. Платы, состоящие из шести слоев, могут иметь три или четыре сигнальных слоя, одну пластину заземления и одну или две пластины питания (см. Рис. 2). Именно поэтому шестислойные МВ (особенно под Pentium 4) крайне дороги
МП могла бы использовать компоненты высоко качества, но все же она оставалась бы ненадежной, так как любая разметка дорожек создает некоторые проблемы с непрерывностью сигнала. Единственный способ узнать является ли непрерывность сигнала проблемой это измерить сигнал осциллографом. Для оверклокеров это может быть наиболее важным потому, что перед разгоном продукт необходимо проверить на возможность работы в форсированных режимах.
Форм-факторы
Материнская плата должна иметь тот же форм-фактор (типо-размер), что и блок питания в корпусе, в который она будет установлена, который, в свою очередь, может быть либо AT или ATX. Сразу хочу отметить, что независимо от типа корпуса, в полноразмерный Tower влезают как платы full - AT / ATX , так и их меньшие модификации. Компьютеры IBM PC AT имели форм-фактор AT (30х35 см), который был уменьшен в размерах и стал называться Baby-AT (ВАТ, 22х33 см). Последний использовался с 1983 по 1997 год для установки всех процессоров от 8086 до PentiumII , но в продаже такие корпуса можно увидеть и сейчас. Обычно в платах АТ использовался полноразмерный 5-контактный разъем DIN для клавиатуры (также назывался АТ), который был совместим с IBM XT . На сегодняшний самый распространенный форм-фактор – ATX (30,5х24 см). Существуют также разновидность последнего стандарта - Micro ATX ( mini - ATX , 28,4х21 см), но корпус для любого варианта используется тот же самый, хотя mATX можно поставить и «маленькие» корпуса Midi - и Mini Tower . Основное отличие между стандартами и их "младшими братьями", кроме отличия в размерах, - максимально допустимое количество слотов для памяти и для дополнительных карт и наличием/отсутствием ISA . АТХ вел ряд новшеств:
Все внешние разъемы располагаются в 2 этажа и напаяны у правого края РСВ. Для них в корпусе предусмотрено большое прямоугольное окно, свободное пространство которого закрывается алюминиевыми заглушками, которые не всегда подходят к корпусу
Процессор находится под блоком питания, который создает дополнительное охлаждение. Но практика показывает, что это охлаждение неэффективно.
Разъемы контролеров floppy и IDE располагаются близко к корзине для крепления винчестера и дисководов, а модули памяти легкодоступны
Многие интегрированные МП используют форм-фактор mATX из-за маленькой PCB и малым количеством слотов для дополнительных карт, что позволяет существенно сократить расходы. Существуют также стандарты LPX и NLX , но они используются только брендами для сборок фирменных моделей компьютеров.
Поддержка процессора
Безусловно, процессор физически и электрически должен быть совместим с МВ. Сейчас абсолютное большинство CPU перешло на использование разъемов Socket . Slot -1 использовались под Pentium II , Slot - A – под ядра Athlon Classic , K 75 и K 76. Сейчас Intel ведет политику постоянной смены типов разъемов: Socket 370 ® Socket 423 ® Socket 478. Причем очень важной особенностью разъема Socket 370 является то, что он имеет несколько электрически несовместимых разновидностей – их принято различать по типам корпусов, вставляемых в них процессоров: PPGA , FCPGA и FCPGA 2. Первый из них не поддерживает ядро Coppermine и Tualatin , второй – только Tualatin . Компания AMD придерживается политики большей заботы о покупателе и использует только один разъем Socket A для всех ядер, начиная с Thunderbird и Spitfire .
4. Платформы Intel Pentium, AMD K5, K6. Гибкость заставляет задуматься.
Умножение частоты и возможность выбора множителя появились еще во времена
процессоров 486. Следующее поколение процессоров - Intel Pentium и AMD K5/K6,
использующее процессорный разъем Socket 7, базируется на той же идеологии
тактирования, но набор частот и множителей был существенно расширен. Перед
оверклокерами встает задача выбора оптимального (с точки зрения
производительности) режима работы процессора. Хотя численные значения частот и
множителей сегодня совсем другие, приведенный ниже принцип рассуждений применим
и для современных систем.
Дано: Тактовый генератор на плате поддерживает частоты шины 50, 55, 60, 66.6
MHz. Процессор поддерживает множители 1.5x и 2 x. Предел устойчивой работы
нашего процессора 120 MHz.
Найти: Оптимальный (с точки зрения производительности) режим работы
процессора.
Очевидно, у нас два варианта: 66.6 x 1.5 = 100 MHz или 60 x 2 = 120 MHz. В
нашем случае, мы не можем использовать 66.6 x 2 = 133.3 MHz, так как заявленный
порог устойчивости процессора 120 MHz. В первом варианте шина работает быстрее,
но ниже частота ядра, во втором варианте – наоборот. Сразу признаемся, что на
прямой вопрос "что лучше" однозначного ответа не существует, и вот почему.
Представим себе компактный фрагмент машинного кода, долго работающий с
компактным блоком данных, код и данные помещаются во внутренний кэш процессора.
Очевидно, что вскоре после начала выполнения, код и данные будут автоматически
скопированы процессором из ОЗУ во внутренний кэш и для доступа к ним не
потребуется обращений по системной шине. От этого момента и до завершения
выполнения нашего фрагмента процессор будет работать с производительностью,
зависящей от частоты ядра и не зависящей от частоты шины.
Теперь представим другую ситуацию – процессор копирует в памяти блок данных,
размером десятки мегабайт. Очевидно, в этом случае, процессор существенную часть
времени будет занят операциями на шине (чтение из блока-источника, запись в
блок-получатель), поэтому производительность здесь существенно зависит от
частоты шины, если, конечно эффект от быстрой шины не нивелирован медленной
оперативной памятью.
Мы рассмотрели два диаметрально противоположных примера. Ситуации,
встречающееся в программном обеспечении на практике, находятся "посередине". Но
тем не менее, на скорость работы одних программ больше влияет частота шины,
других – частота ядра. Даже в пределах одного приложения могут встречаться
фрагменты, как первого, так и второго типа. Поэтому, углубляясь в теоретические
рассуждения, не следует забывать и о методе "научного тыка".
2. Платформы PC/AT 286, 386. Работаем с переключателями.
Во времена процессоров 80286, 80386 производители наладили выпуск
универсальных материнских плат, допускающих установку процессоров с различными
тактовыми частотами. Модельный ряд 80386DX содержал процессоры с частотами 16,
20, 25, 33, 40 MHz. Первые универсальные платы использовали панельку для
установки осциллятора (осциллятором здесь называется схема, содержащая кварцевый
резонатор и генератор, интегрированные в одном корпусе). Пользователь или
производитель платы должен был установить осциллятор, частота которого
соответствовала тактовой частоте процессора. Разумеется, системный таймер
тактировался от другого генератора.
Такой "детский конструктор" уже допускал разгон без паяльника (путем
установки осцилляторов с частотами, превышающими штатные), если конечно
осциллятор был установлен в панельке, а не запаян. Затем появились так
называемые частотные синтезаторы, способные из частоты одного задающего
генератора (обычно это классическая для платформы PC частота 14.31818 MHz)
сформировать все частоты, необходимые для работы платформы при поддержке
различных процессоров. Один из методов выполнения такого преобразования –
умножить опорную частоту на достаточно большой коэффициент, в результате
получится сигнал с частотой, из которой путем деления на целые коэффициенты
можно получить все требуемые частоты с приемлемой точностью. Данное
преобразование выполняется внутри микросхемы частотного синтезатора. Для
управления частотой выдаваемого тактового сигнала используются входы задания
частоты. Код, подаваемый на эти входы, задается переключателями (jumpers),
установленными на материнской плате. Теоретически, в таких системах уже
существовала возможность реализации программного управления тактовой частотой.
Для этого требовалось реализовать порт вывода (программно-доступный регистр),
выходы которого подключаются к входам задания частоты, вместо переключателей.
Записывая разные коды в этот порт, BIOS или другая программа может переключать
тактовую частоту. Но данное решение не стало популярным, во-первых, потому, что
такая гибкость в те времена еще не была востребована, а во-вторых, потому, что
большинство частотных синтезаторов тех времен не допускали переключение частоты
без выключения питания.
Книги
22) В.Л. Григорьев. Микропроцессор i486. Архитектура и программирование.
Москва ТОО "ГРАНАЛ" 1993.
23) В.Г. Артюхов, А.А. Будняк. В.Ю. Лапий. С.М. Молявко, А.И. Петренко.
Проектирование микропроцессорной электронно-вычислительной аппаратуры.
Справочник. Киев "Тэхника" 1988.
24) К. Г. Самофалов, О.В. Викторов. Микропроцессоры. Библиотека инженера. Киев
"Тэхника" 1989.
25) 2B ProGroup: В.А. Вегнер, А.Ю. Крутяков, В.В. Серегин, В.А. Сидоров, А.В.
Спесивцев. Аппаратура персональных компьютеров и ее программирование. IBM
PC/XT/AT и PS/2. Москва "Радио и связь" 1995.
26) Ю.М. Казаринов, В.Н. Номоконов, Г.С. Подклетнов, Ф.В. Филиппов.
Микропроцессорный комплект К1810. Структура, программирование, применение.
Справочная книга. Москва "Высшая школа" 1990.
Любой, кто разбирал компьютер, видел как много различных элементов на материнской плате, в этой статье я постараюсь кратко описать и показать основные компоненты, устанавливаемые на материнские платы современных компьютеров.

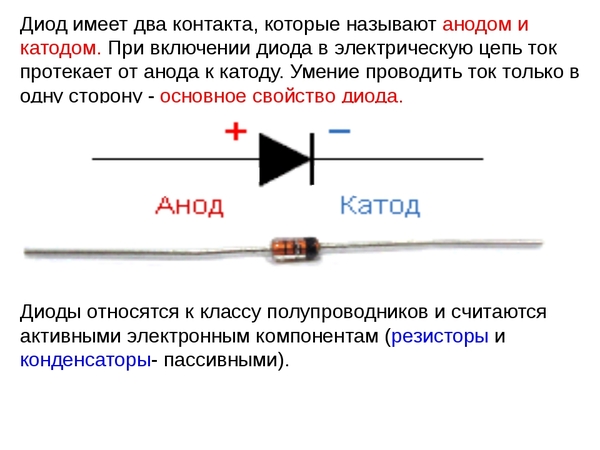
Или мосфет. Обычно используется для усиления, генерации и преобразования электрических сигналов. В общем случае транзистором называют любое устройство, которое имитирует главное свойство транзистора - изменения сигнала между двумя различными состояниями при изменении сигнала на управляющем электроде.

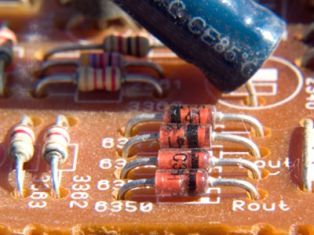
Резистор - это пассивный элемент радиоэлектронной аппаратуры, предназначенный для создания в электрической цепи требуемой величины электрического сопротивления, обеспечивающий перераспределение и регулирование электрической энергии между элементами схемы.

Электролитические конденсаторы схожи с аккумуляторами, но в отличии от которых выводят весь свой заряд в крошечные доли секунды. Используются, чтобы выровнять напряжение или блокировать постоянный ток в цепи.
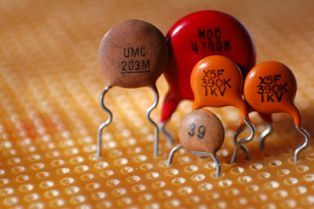
Керамические SMD, танталовые, ниобиевые и др. Лучше для электроники, которая не требует высокой интенсивности работы.

Светодиод (LED). В основном LED - крошечные лампочки.
Катушки и индуктивности

Индуктор (дроссель) - обмотка провода, катушка, используется для смягчения скачка тока при запуске. Зачастую стоят перед процессором.
Генератор тактовых частот.

Генератор тактовых частот (клокер) — устройство, формирующее тактовые частоты, используемые на материнской плате и в процессоре.

Кварц перемещает энергию назад и вперед между двумя формами в равные доли времени. Задаёт частоту работы всей электрической схемы.
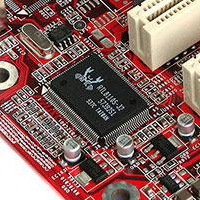
SuperIO (SIO, MultiIO, MIO, "мультик").

Третья по значимости и размеру микросхема на материнской плате – после мостов. Отвечает за порты ввода-вывода (COM, LPT, GamePort, инфракрасный порт, PS/2 для клавиатуры и мыши и др.). Является микроконтроллером (выполняет часть прошивки биос), выродился из контроллера клавиатуры, но в современных платах выполняет множество важных функций. Он например мониторит сигналы с Шим и когда убедится что всё ОК с питанием - даёт южному мосту команду "нажали на вкл, запускайся", ещё он управляет режимами S0-S5. На текущий момент это его основной функционал, а функции ввода - вывода - отмирающий придаток. Зачастую обладает дополнительным функционалом:
встроенный Hardware Monitoring
контроллер управления скоростью вентиляторов
интерфейс для подключения CompactFlash-карт.
ШИМ-контроллер (от Широтно-Импульсная Модуляция) - главная микросхема, управляющая напряжением на материнской плате.
Мосты (северный и южный).
Северный мост (MCH).

Одним из основным составляющим компонентом материнской платы будь то компьютера либо ноутбука является Северный мост (англ. Northbridge; в отдельных чипсетах Intel, также — контроллер-концентратор памяти с английского Memory Controller Hub)
MCH является системным контроллером чипсета на материнской плате платформы x86, к которому в рамках организации взаимодействия подключено следующие оборудование:
1. через Front Side Bus — микропроцессор, если в составе процессора нет контроллера памяти, тогда через шину контроллера памяти подключена— оперативная память.
2. через шину графического контроллера — видеоадаптер (в материнских платах нижнего ценового диапазона, видеоадаптер часто встроенный. В таком случае северный мост, произведенный Intel, называется GMCH (от англ. Chipset Graphics and Memory Controller Hub).
Название чипа как «Северный мост» можно объяснить представлением архитектуры чипсета в виде карты. В результате процессор будет располагаться на вершине карты, на севере
Исходя из назначения, северный мост определяет параметры (возможный тип, частоту, пропускную способность):
- системной шины и, косвенно, процессора (исходя из этого — до какой степени может быть разогнан компьютер);
- оперативной памяти (тип — например SDRAM, DDR, DDR2, её максимальный объем);
Во многих случаях именно параметры и быстродействие северного моста определяют выбор реализованных на материнской плате шин расширения (PCI, PCI Express) системы.
В свою очередь, северный мост соединён с остальной частью материнской платы через согласующий интерфейс и южный мост. Когда технологии производства не позволяют скомпенсировать возросшее, вследствие усложнения внутренней схемы, тепловыделение чипа, современные мощные микросхемы северного моста помимо пассивного охлаждения (радиатора) для своей бесперебойной работы требуют использования индивидуального вентилятора или системы жидкостного охлаждения, что в свою очередь увеличивает энергопотребление всей системы и требует более мощного блока питания.
Минуя северный мост согласно нашей схеме двигаясь на юг на материнской плате расположен южный мост.
Южный мост ( ICH)

Южный мост (от англ. Southbridge) (функциональный контроллер), также известен как контроллер-концентратор ввода-вывода (от англ. I/O Controller Hub, ICH).
Обычно это одна микросхема, которая связывает «медленные» (по сравнению со связкой «Центральный процессор-ОЗУ») взаимодействия (например, Low Pin Count, Super I/O или разъёмы шин для подключения периферийных устройств) на материнской плате с ЦПУ через Северный мост, который, в отличие от Южного, обычно подключён напрямую к центральному процессору.
Если взять функциональность, то южный мост включает в себя:
- контроллеры шин PCI, PCI Express, SMBus, I2C, LPC, Super I/O;
- PATA (IDE) и SATA контроллеры;
- часы реального времени (Real Time Clock);
- управление питанием (Power management, APM и ACPI);
- энергонезависимую память BIOS (CMOS);
- звуковой контроллер (обычно AC'97 или Intel HDA).
Опционально южный мост также может включать в себя контроллер Ethernet, RAID-контроллеры, контроллеры USB, контроллеры FireWire, аудио-кодек и др. Реже южный мост включает в себя поддержку клавиатуры, мыши и последовательных портов, но обычно эти устройства подключаются с помощью другого устройства — Super I/O (контроллера ввода-вывода).
Поддержка шины PCI включает в себя традиционную спецификацию PCI, но может также обеспечивать и поддержку шины PCI-X и PCI Express. Хотя поддержка шины ISA используется достаточно редко, она все таки является неотъемлемой частью современного южного моста. Шина SM используется для связи с другими устройствами на материнской плате (например, для управления вентиляторами). Контроллер DMA позволяет устройствам на шине ISA или LPC получать прямой доступ к оперативной памяти, обходясь без помощи центрального процессора.
Контроллер прерываний обеспечивает механизм информирования ПО, исполняющегося на ЦПУ, о событиях в периферийных устройствах. IDE интерфейс позволяет «увидеть» системе жёсткие диски. Шина LPC обеспечивает передачу данных и управление SIO (это такие устройства, как клавиатура, мышь, параллельный, последовательный порт, инфракрасный порт и флоппи-контроллер) и BIOS ROM (флэш).
APM или ACPI функции позволяют перевести компьютер в «спящий режим» или выключить его.
Системная память CMOS, поддерживаемая питанием от батареи, позволяет создать ограниченную по объёму область памяти для хранения системных настроек (настроек BIOS).
Меню настроек Bios.
Северный и южный мосты материнской платы вкупе составляют одно целое устройство управления всей системой так сказать глаза, уши, руки ЦП. Вкупе эти два чипа называются – чипсет.
Чипсет (англ. chipset) — набор микросхем, спроектированных для совместной работы с целью выполнения набора каких-либо функций. Так, в компьютерах чипсет, размещаемый на материнской плате выполняет роль связующего компонента, обеспечивающего совместное функционирование подсистем памяти, центрального процессора (ЦП), ввода-вывода и других. Чипсеты так можно встретить и в других устройствах, например, в радиоблоках сотовых телефонов.
Чаще всего чипсет современных материнских плат компьютеров состоит из двух основных микросхем северного и южного моста (иногда объединяемых в один чип, т. н. системный контроллер-концентратор (англ. System Controller Hub, SCH):
Иногда в состав чипсета включают микросхему Super I/O, которая подключается к южному мосту по шине Low Pin Count и отвечает за низкоскоростные порты: RS232, LPT, PS/2.
Существуют и чипсеты, заметно отличающиеся от традиционной схемы. Например, у процессоров для разъёма LGA 1156 функциональность северного моста (соединение с видеокартой и памятью) полностью встроена в сам процессор, и следовательно, чипсет для LGA 1156 состоит из одного южного моста, соединенного с процессором через шину DMI.
Создание полноценной вычислительной системы для персонального и домашнего компьютера на базе, состоящих из столь малого количества микросхем (чипсет и микропроцессор) является следствием развития техпроцессов микроэлектроники развивающихся по закону Мура.
В создании чипсетов, обеспечивающих поддержку новых процессоров, в первую очередь заинтересованны фирмы-производители процессоров. Исходя из этого, ведущими фирмами (Intel и AMD) выпускаются пробные наборы, специально для производителей материнских плат, так называемые англ. referance-чипсеты. После обкатки на таких чипсетах, выпускаются новые серии материнских плат, и по мере продвижения на рынок лицензии (а учитывая глобализацию мировых производителей, кросс-лицензии) выдаются разным фирмам-производителям и, иногда, субподрядчикам производителей материнских плат.
Список основных производителей чипсетов для архитектуры x86: Intel, NVidia, ATI/AMD: (после перекупки в 2006 году ATi вошла в состав Advanced Micro Devices), Via, SiS
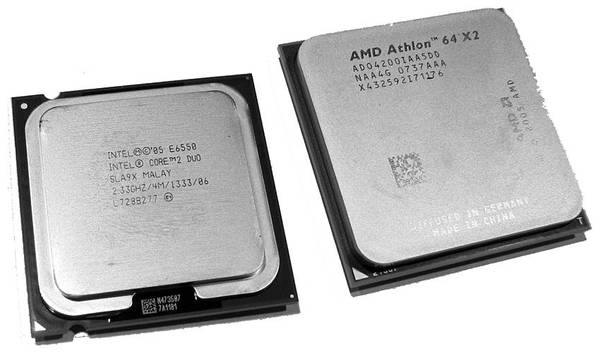
Микропроцессор (ЦП)- является полным механизмом вычисления.

BIOS (Basic Input-Output System) микросхемы основной системы ввода/вывода.
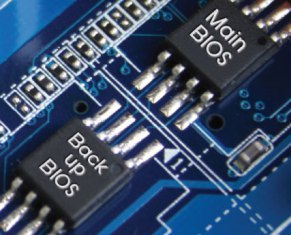
Технология Dual Bios на материнских платах производства Gigabyte. В случае сбоя основного bios его можно восстановить из резервной микросхемы.

Батарейка CMOS. Служит для хранения настроек BIOS и для поддержания системного времени в актуальном состоянии.

Аудиокодек (англ. Audio codec; аудио кодер/декодер) — компьютерная программа или аппаратное средство, предназначенное для кодирования или декодирования аудиоданных.
Сетевой контроллер (Onboard LAN).
Сетевой контроллер (Onboard LAN) представляет собой отдельную микросхему. Как и в случае с аудио кодеком при выходе из строя может сильно греться. Ремонтируется так же заменой или демонтажем.
Иногда, при неисправности внуренней сетевухи или звуковухи компьютер может не стартануть вводя в ступор южник. Можно починить материнскую плату просто отпаяв микросхему и как правило с вероятностью 80% компьютер заводится и тогда отключив в BIOS
сеть и/или звук и вставив внешнюю плату можно пользоваться компьютером без опаски.
1. Платформы PC/XT. Разгоняем с помощью паяльника.
Тактовый генератор в IBM PC/XT реализован на микросхеме Intel 8284, советский
аналог – КР1810ГФ84, описан в [26].
Задающий генератор использует кварцевый резонатор частотой 14.31818 MHz.
Тактовая частота процессора формируется путем деления на 3 частоты задающего
генератора: 14.31818 MHz / 3 = 4.773 MHz. Тактовый сигнал для системного таймера
формируется путем деления на 12 частоты задающего генератора: 14.31818 MHz / 12
= 1.193 MHz. Заменив кварцевый резонатор 14.318 MHz на 24.0 MHz, мы получим
тактовую частоту процессора в режиме "турбо" 24.0 MHz / 3 = 8.0 MHz.
Работоспособность системы на новой тактовой частоте будет зависеть от
величины технологического запаса быстродействия у процессора, подсистем памяти и
ввода-вывода. Отдельного внимания требует системный таймер. Напомним, что он
используется программным обеспечением для формирования интервалов времени,
продолжительность которых не зависит от быстродействия процессора, поэтому
повышение частоты тактирования таймера приведет к нежелательным последствиям:
будут спешить часы DOS Time, частоты звуковых сигналов, выводимых на PC Speaker,
будут завышены. Чтобы избежать таких последствий, система IBM PC/XT,
поддерживающая режим "турбо" должна содержать два тактовых генератора: для
процессора и для таймера. Вместе с тем, существовали некорректно написанные
программы, которые для формирования времязадающих функций использовали не
таймер, а процессор, рассчитывая на то, что тактовая частота всегда равна 4.773
MHz. Для обеспечения совместимости с такими программами, была введена кнопка
"Turbo", позволяющая переключаться между стандартной и повышенной частотой.
Заметим, что понятия "множитель" тогда не существовало, частоты тактирования
ядра процессора и шины всегда были равны. Следовательно, разгон процессора мог
быть выполнен только путем повышения частоты шины.
7. Описание работы программы.
Как и в ранее опубликованных статьях данного цикла, для работы с предлагаемым
примером, в целях монопольного и беспрепятственного взаимодействия программы с
аппаратным обеспечением автор применил "древнюю" технологию отладки под DOS.
Аргументация такого шага и рекомендации по организации рабочего места приведены
в ранее опубликованной статье "64-битный режим под DOS: исследовательская работа
№ 1".
Предлагаемый пример является "полуфабрикатом" для написания программы
перенастройки тактового генератора с целью изменения частоты системной шины
процессора. Программа измеряет и визуализирует тактовую частоту процессора,
перенастраивает генератор, затем повторно измеряет и визуализирует частоту, для
контроля результатов перенастройки генератора.
Как было сказано выше, архитектура программно-доступных регистров, используемых
для перепрограммирования генератора, зависит от модели материнской платы, в
частности от типа "южного моста" чипсета и тактового генератора. Поэтому, для
написания универсальной программы потребуется составление базы данных,
описывающей все поддерживаемые платы. В предлагаемом примере эта задача решена
для платы PC Partner / SuperGrace 35-8695 (Socket A, KT133) c "южным мостом" VIA
VT82C686A и тактовым генератором Cypress W230H. В данной плате, как и в
большинстве более современных плат, тактовый генератор выполнен в виде отдельной
микросхемы, программный доступ к его регистрам обеспечивается по 2-проводной
последовательной шине SMB (System Management Bus). Контроллер шины SMB находится
в составе "южного моста" чипсета. Заинтересованный читатель может реализовать
поддержку своей платы на базе приведенного примера.
Заметим, что программное управление тактовым генератором позволяет не только
управлять частотой процессора. Используя этот механизм, BIOS может выключить
тактирование на неиспользуемых слотах PCI, DIMM с целью уменьшения радиопомех,
генерируемых платой, изменять частоты тактирования других устройств и т.п.
В приведенном примере рассматривается генератор, регистры которого доступны
только для записи посредством SMB транзакции Write Block. Многие современные
платы используют генераторы, регистры которых доступны также для чтения
посредством SMB транзакции Read Block. В этом случае появляется дополнительное
удобство для программ, которым необходимо изменить только часть битов, они могут
выполнить чтение-модификацию-запись, вместо подготовки образа всего регистрового
блока для записи в генератор.
При программировании тактового генератора, важно понимать следующее. Многие
микросхемы генераторов (включая рассматриваемый) не имеют входа RESET для
аппаратного сброса. Их сброс происходит только по включению питания, сигналу
RESET они не подчиняются. Поэтому, если мы некорректно запрограммируем генератор
и компьютер "зависнет", выйти из этого состояния по кнопке RESET не получится.
Потребуется выключить и включить питание.
Разумеется, не следует забывать и о том, что существенное превышение тактовой
частоты может приводить к перегреву и постепенному выходу из строя разгоняемых
компонентов.
Прилагаемый каталог WORK содержит следующие файлы:
ASM_TD.BAT – обеспечивает ассемблирование, линковку и запуск программы под
отладчиком. При запуске TASM и TLINK используются опции, обеспечивающие
добавление отладочной информации в EXE файл.
ASM_EXE.BAT – обеспечивает ассемблирование и линковку. Генерируется EXE файл.
OVERCLK.ASM – основной модуль программы.
OUTPUT.INC – процедура вывода строки на экран с использованием сервиса DOS, а
также процедуры вывода десятичных чисел.
CPUID.INC – процедура проверки наличия поддержки процессором инструкции CPUID.
CLK_IRQ0.INC – процедура измерения тактовой частоты процессора, использующая
системный таймер, основана на определении приращения содержимого регистра TSC за
время между двумя прерываниями IRQ0.
SMB_WBLK.INC – процедура выполнения транзакции Write Block на шине SMB. Данный
вид транзакции используется для записи в регистры тактового генератора.
DELAY.INC – процедура задержки с использованием прерываний IRQ0 от системного
таймера. Применяется в данной программе для синхронизации и отработки паузы
перед измерением тактовой частоты процессора. Это уменьшает влияние факторов,
снижающих точность измерения.
DATASEGS.INC – сегменты данных: сегмент для хранения переменных, сегмент с
текстовыми строками, сегмент стека.
CLK_DATA.INC – блок данных для записи в регистры тактового генератора.
SMBUS.TXT – текстовый файл, краткая справка по регистрам контроллера SMBus и
назначению битов в регистрах.
Рассмотрим выполнение основного модуля. Нумерация пунктов данного описания
соответствует нумерации пунктов комментариев в исходном тексте - файле
WORK\overclk.asm.
1) Контрольная точка 00h – начало выполнения программы. Вывод в порт 80h кода
00h.
2) Установка SS:SP для адресации стека.
Отметим, что проверить наличие на плате заданного тактового генератора мы не
можем, так как генераторы не поддерживают универсального механизма
детектирования. То есть на плате с требуемым "южным мостом" но другим
генератором программа может приступить к программированию генератора и
отработать некорректно, так как генератор другой. Один из путей решения проблемы
– добавление процедуры идентификации модели платы по информации из BIOS.
7) Программируем конфигурационные регистры устройства Power Management Unit для
обеспечения доступа к регистрам контроллера SMB через диапазон в пространстве
ввода-вывода. Сохраняем базовый адрес этого диапазона для последующего
использования. Подробности в [19].
9) Измеряем тактовую частоту процессора, используя системный таймер. Измеряется
частота ядра процессора (умноженная процессором).
10) Выводим результат измерения на экран. Это частота до перенастройки
генератора.
11) Перепрограммируем генератор. Блок данных, детально описанный в файле
CLK_DATA.INC, посредством SMB транзакции Write Block, передается в тактовый
генератор. После данной операции должна установиться новая тактовая частота
процессора, в соответствии с содержимым файла CLK_DATA.INC. За выбор частоты
отвечает байт 0 регистрового блока. Бит 3 следует установить в "1" для активации
режима программного переключения частоты. Биты 6,5,4,2,1 следует установить в
соответствии с требуемым новым значением частоты, например для установки частоты
104 MHz байт 0 должен содержать 01111100b=7Ch. Подробности в [19], [20], [21].
Можно использовать описание контроллера SMB из документа [10], так как
контроллеры SMB микросхем Intel PIIX4 (82371AB) и VIA VT82C686A/B совместимы.
Таким образом, источником информации по содержанию отправляемого блока данных
является документация на микросхему тактового генератора. Источником информации
по протоколу отправки этого блока является спецификация шины SMB и информация по
контроллеру SMB из документа на "южный мост" чипсета.
13) Измеряем тактовую частоту процессора, используя системный таймер. Измеряется
частота ядра процессора (умноженная процессором).
14) Выводим результат измерения на экран. Это частота после перенастройки
генератора.
15) Восстанавливаем состояние конфигурационных регистров контроллера SMB,
модифицированных в ходе работы программы. Подробности в [19].
Источники информации
17) System Management Bus (SMBus) Specification. Version 2.0.
18) PCI BIOS Specification. Revision 2.1.
(Информация на данном сайте более полная, чем на "родных" сайтах
производителей указанных микросхем.)
19) VIA VT82C686A South Bridge Datasheet. Revision 1.54. Для поиска документа
набирать строку "VT82C686".
20) VIA VT82C686B South Bridge Datasheet. Revision 1.71. Для поиска документа
набирать строку "VT82C686".
21) Cypress W230 Spread Spectrum FTG (Frequency Timing Generator) for VIA K7
Chipset. Для поиска документа набирать строку "W230".
Источники информации
17) System Management Bus (SMBus) Specification. Version 2.0.
18) PCI BIOS Specification. Revision 2.1.
(Информация на данном сайте более полная, чем на "родных" сайтах
производителей указанных микросхем.)
19) VIA VT82C686A South Bridge Datasheet. Revision 1.54. Для поиска документа
набирать строку "VT82C686".
20) VIA VT82C686B South Bridge Datasheet. Revision 1.71. Для поиска документа
набирать строку "VT82C686".
21) Cypress W230 Spread Spectrum FTG (Frequency Timing Generator) for VIA K7
Chipset. Для поиска документа набирать строку "W230".
Чем это она питается?
На материнскую плату подается напряжение от блока питания (БП): в случае АТ форм-фактора это 5V, В случае ATX – 3.3 V , поэтому в МП форм-фактора АТ используется несколько микросхем VRM для преобразования 5В в более низкие напряжения, а в ATX такой модуль один. Различные компоненты, установленные на МВ питаются от разного напряжения. Наиболее распространенные компоненты потребляют +5В (такие как чип BIOSа, часы реального времени, контроллер клавиатуры, DRAM чипы, логика большей части контроллеров, коннекторы) и +3.3В (L2 кэш, чипсет, SDRAM чипы, AGP ). Двигатели накопителей и кулеры питаются от +12В. Но БП также вырабатывает отрицательные напряжения, и возникает законный вопрос, зачем? Ответ прост: в современных компьютерах он не используется. –5В раньше подводилось к ISA шине и использовалось для питания старых контроллеров НГМД. Напряжения +12 и –12В на системной плате также не используются, они подводились к шине ISA для питания различных адаптеров и контроллеров последовательных портов.
Блок питания не только вырабатывает необходимое напряжения, но и контролирует включение и выключение компьютера, а именно не позволяет компьютеру включиться при нештатном напряжении. Перед запуском системы выполняется проверка выходного напряжения – для этого используется сигнал Power _ Good +5 V , который вырабатывается БП через 0,1-0,5 с после запуска компьютера, если проверки прошли успешно. Этот сигнал подаётся на МВ, где микросхемой тактового генератора формируется сигнал начальной установки CPU . При отсутствии Power _ Good ’а микросхема генератора будет всё время подавать сигнал начальной установки, не позволяя включиться компьютеру, до установки нормального питания. В АТ корпусах он подается на контакт 1 колодки Р8, в ATX – на 8 контакт. В некоторых дешевых БП этого сигнала нет вообще, а цепь его просто подключена к +5В, использовать такие БП – подвергать «маму» смертельной опасности, впрочем как и CPU .
БП АТ и ATX имеют разные принципы подключения и взаимодействия с системной платой: АТ подключается через два 6-штырьковых разъема, PS 8 и PS9, а ATX – одним 20-контактным разъемом с ключом, исключающим возможность неправильного подсоединения к МВ. В АТ-корпусах питание 220В от БП подается на 4-жильный кабель, соединенный с кнопкой питания Power , когда эта кнопка нажата, то контакты замыкаются и переменное напряжение возвращается в БП, а оттуда на МП. В корпусах ATX система включается подачей сигнала PS _ ON ( Power _ On ), поступающем с 14 контакта 20- pin разъема при нажатии кнопки питания на корпусе, которая не имеет 2 положений, как ранее, которая замыкается на коннектор PW _ BTN на «матери». Это низкий активный сигнал, при высоком уровне этого сигнала БП выключается. Поскольку этот сигнал подается с МП, то он может быть сгенерирован ОС или переключателем Power , поэтому мы имеем возможность выключать компьютер с помощью Windows . Кроме того, еще одним новшеством в ATX стало использование сигнала «ждущего режима» +5 VSB ( Stand _ by , Soft power ), который всегда активен и подает на плату питание малой мощности, даже когда компьютер выключен, поэтому настоятельно рекомендую использовать БП с выключателем сзади, который стоит отключать, когда компьютер не используется. Эти два сигнала позволяют, используя APM , в ОС Windows ME , Win 2 K и WindowsXP кнопкой Power на клавиатуре выключать питание, а Sleep – переходить в «ждущий режим» (в Windows 98 обе кнопки вызывают «ждущий режим»).
При подключении устройств к МП необходимо знать принципы разводки и схемотехники. Главное правило любого подключения – соблюдение полярности. Первый контакт колодки на МП необходимо совместить с первым контактом на шнуре (шлейфе). Первый контакт на шнурах часто отмечается красным цветом.
Регуляторы напряжения
Очень важен вопрос правильного питания компонентов материнской платы. Огромное количество проблем возникает из-за некачественного питания элементов, что часто приводит к неработе, неустойчивой работе и даже выгоранию некоторых элементов (особенно в слотах). Источник питания подает 5В прямого напряжения на МП, следовательно, для некоторых компонентов системы требуется регуляция мощности (например, для регуляции напряжения на ядре CPU ). Для этого используется дополнительный модуль, который называется VRM (модуль стабилизатора напряжения), или плата регулятора напряжения, встроенная в интегральную схему и впаянная в PCB. Напряжения питания i / o цепей сейчас установлено для всех CPU 3,3 V . А вот с напряжением питания ядра Vcore ( Vcc ), который регулируется с помощью VRM , гораздо больше проблем: у CPU Intel традиционно Vcc ниже, и значит, тепловыделение и потребляемая мощность ниже, т.е. повышается устойчивость в работе. Но с выпуском Athlon Thoroughbred оно (как и у P 4 Northwood ) стало 1,5(1.6) V . Хочу заметить, что ядро Coppermine может работать при напряжениях 1.5-1.65 V , Tualatin – 1.475-1.55 V , Spitfire – 1.4-1.6 V , Thunderbird – 1.6-1.75 V , Palomino – 1.7-1.85 V . Остальные ядра не имеют разброса по напряжениям. Напряжение можно выставить больше указанного диапазона – это используется при разгоне для уменьшения тепловыделения. На всех процессорах, начиная с Pentium ММХ, требуется два регулятора напряжения - один для контроля напряжения на I/O (3.3В), а другой для питания на ядре процессора, но в МП форм-фактора ATX используется VRM только для ядра процессора.
Для того, чтобы использовать как можно больше различных типов процессоров, схема должна держать определенный диапазон напряжения. Для этого обычно на плату устанавливается набор резисторов соединенных с рядом контактов. Сейчас на большинстве МП стоит так называемый автодетект (автоопределение), это значит, что схема сама определяет и распределяет напряжение, ориентируясь по контактам VID [0:4] на процессоре, что исключает потребность в джамперах. Но на процессорах AMD лучше выставлять напряжение вручную, теперь это легко осуществляется через BIOS .
Конденсаторы
Конденсаторы обеспечивают ровный поток напряжения в схеме. Это очень важно потому, что потребление энергии процессором может меняться мгновенно от низкого к высокому и наоборот, особенно когда выполняется режим приостановки работы (HALT) или возвращение в нормальное состояние. Регуляторы напряжения не могут реагировать мгновенно на изменения, для этого и "сглаживается" напряжение.
Используются 2 типа конденсаторов: конденсаторы оксидно-электрические алюминиевые и танталовые. На мой взгляд танталовые конденсаторы предпочтительней, чем алюминиевые, т.к. оксидно-электрические конденсаторы имеют особенность высыхать, а следовательно терять свою емкость. Кроме того, они чувствительны к высокой температуре. Но обычно проблема такого рода не возникает, ведь апгрейд МВ происходит, как минимум раз в 4 года.
Важный фактор при выборе некоторых конденсаторов (не считая его емкость) это значение ESR (эквивалент последовательности сопротивления). Сопротивление понижает напряжение и, вследствие этого, вырабатывается тепло, следовательно, значение ESR должно быть как можно меньше. Из всего следует, что значение ESR конденсаторов является критическим фактором, и не важно из какого материала сделан конденсатор. Кроме того, важным фактором стало расположение конденсаторов в связи с огромными размерами кулеров под Pentium 4, которые часто мешают правильной установке последнего.
Генератор тактовых импульсов (Clock Generator Chip)
Каждый компонент в компьютере работает по синхронизующим импульсным тактам ( clock , CLK ), выдаваемым тактовым генератором - но не каждый компонент работает на одних и тех же частотах (тактах). В компьютерах класса 486 и выше применяется деление опорной частоты генератора для синхронизации шин и внутреннее умножение частоты в процессорах.
Каждый чипсет МП имеет особые характеристики, которые выражаются в синхронизации (стробировании), в диапазоне поддерживаемых частот. За опорную частоту берется частота системной шины ( host bus clk ), которая, благодаря особенностям работы генератора, управляет частотой локальных шин через встроенные коэффициенты деления, которые находятся от неё в прямой зависимости. Для каждой шины чипсет может поддерживать как один, так и несколько коэффициентов. Обычно, наличием нескольких делителей, а соответственно, и более широкими возможностями по установкам CPU и разгону, славятся чипсеты VIA и SIS . Так уж придумали, что коэффициент меняется через каждые 33 МГц по опорной частоте. Для локальной шины с базовой частотой 33МГц ( PCI ) должны поддерживаться коэффициенты соотношения с системной шиной ½ (при FSB =66-99МГц); 1/3 (для 100-133МГц) и ¼ (для 133-166 МГц), т.е. используются делители 2, 3 и 4. Для шины 66МГц ( AGP ) должен поддерживаться коэффициент 1, 2/3 и ½ соответственно, а делители соответственно – 1, 1.5 и 2. Тоже самое относится и к шинам USB , ISA , В промежутках, где коэффициент неизменен, с ростом частоты FSB растёт и частота локальных шин, что характерно для разгона по шин (табл. 1). Использование нестандартных частот системной шины может привести к некорректной работе или редко даже к выгоранию устройств, находящихся на локальных шинах. Для поддержки CPU с различной частотой используются множители частоты: Core clock (частота ядра) = FSB * множитель .
Сегодня даже рядовой пользователь может попытаться повысить
производительность своего компьютера, изменяя состояние опций BIOS Setup. А было
время, когда для выполнения подобной операции требовались паяльник, осциллограф
и серьезные познания в области цифровой схемотехники. Для современных
оверклокеров акцент сместился от схемотехники к термодинамике, так как
устойчивость работы электронных схем на частотах, превышающих штатные,
существенно зависит от эффективности их охлаждения.
Все эти результаты эволюции платформы PC, безусловно, хороши и логичны.
Недостаток только в том, что возможности для удовлетворения любопытства и
исследовательского интереса существенно уменьшились, так как в домашних условиях
"залезть" внутрь микросхем чипсета и тем более что-то там модифицировать, к
сожалению, невозможно.
Мы в очередной раз убеждаемся в том, что ищущий "изюминку" не обрадуется
килограмму изюма, а счастье есть состояние несовместимое с фундаментальными
свойствами пространства и времени. Так как пути устранения указанного
противоречия автору неизвестны, перейдем непосредственно к предметной области.
Чтобы разобраться в работе тактового генератора и схемотехнических аспектах
разгона, рассмотрим эволюцию подсистемы тактирования от "древней" IBM PC/XT до
сегодняшних платформ. В практической части статьи приведен пример, позволяющий
на уровне принципиальной электрической схемы и ассемблера посмотреть на
процессы, происходящие при переключении тактовой частоты в BIOS Setup.
Читайте также: