Usb uart подключение к ардуино
Универсальный асинхронный приёмопередатчик (Univsersal Asynchronos Reciever-Transmitter) - это физическое устройство приёма и передачи данных по двум проводам. Оно позволяет двум устройствам обмениваться данными на различных скоростях. В спецификацию UART не входят аналоговые уровни на которых ведётся общение между устройствами, UART это протокол передачи единиц и нулей, электрическую спецификацию на себя берут другие стандарты, такие как TTL (transistor-transistor logic — транзисторно-транзисторная логика), RS-232, RS-422, RS-485 и другие (RS [англ.recommended standard] — рекомендованный стандарт). На данный момент в микроконтроллерах используется в основном TTL (или точнее CMOS) UART для соединения не более двух устройств. В наших примерах мы часто называем его последовательным портом.
Скорость передачи данных
Скорость изменения логических уровней (импульсов) на линии принято измерять в бодах. Единица измерения названа так в честь французского изобретателя Жана Мориса Эмиля Бодо.
Скорость при использовании UART может быть любой, единственное требование — скорости передающего и принимающего должны быть одинаковы. Стандартная скорость UART принята за 9600 бод. Arduino без проблем и лишних настроек может принимать и передавать данные на скоростях до 115200 бод.
Соединение двух Arduino через беспроводной UART
Данный пример передаёт "как есть" всё что он получает от модуля в серийный порт Arduino. Пример можно использовать для проверки связи между модулями и для обмена данными между двумя Arduino через беспроводной UART. Для соединения двух Arduino необходимо загрузить данный скетч в обе.
Передача массива и включение светодиода на расстоянии
В примере используются два модуля и две платы Arduino. Модули должны быть установленны на один канал и режим работы (см. первый пример).
Пример передачи массива. Включаем светодиод значением первого байта. Arduino с передатчиком посылает заголовок и массив; Arduino с приёмником ждёт заголовок и принимает массив. Тип массива может быть только byte, char, int8_t или uint8_t,
Скетч принимает массив из скетча выше и включает встроенный светодиод по значению первого байта
Лок-биты (Pro)
Лок-биты (lock-bits) позволяют управлять доступом к памяти микроконтроллера, что обычно используется для защиты устройства от копирования. Лок-биты собраны опять же в конфигурационный лок-байт, который содержит: BOOTLOCK01, BOOTLOCK02, BOOTLOCK11, BOOTLOCK12, LOCKBIT1, LOCKBIT2 (для ATmega328). Калькулятор лок-битов можно использовать этот. BOOTLOCK биты позволяют запретить самому МК запись (самопрограммирование) во flash память (область программы и область загрузчика)
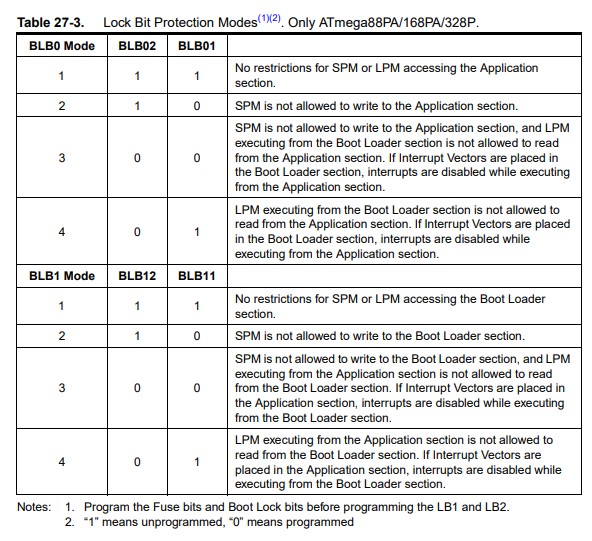
А вот локбиты LOCKBIT позволяют запретить запись и чтение flash и EEPROM памяти извне, при помощи программатора, т.е. полностью защитить прошивку от скачивания и копирования:

Таким образом включив LOCKBIT1 (лок-байт будет 0x3E) мы запретим внешнюю запись во Flash и EEPROM память, т.е. при помощи ISP программатора, а включив LOCKBIT1 и LOCKBIT2 (лок-байт: 0x3C) полностью заблокируем заодно и чтение данных из памяти микроконтроллера. Повторюсь, всё описанное выше относится к ATmega328p, для других моделей МК читайте в соответствующих даташитах.
Интерфейсные модули
Некоторые модули имеют один или несколько логических выходов и передают данные по цифровому интерфейсу связи. Сигнальные пины таких датчиков могут быть подписаны как SCK, SDA, SCL, MISO, MOSI, SS и прочими аббревиатурами, отличными от OUT, как в “простых” модулях. Подключаются такие модули к пинам интерфейсов (подробнее в этом уроке) на плате Arduino и опрашиваются при помощи сторонних библиотек. Для работы с такими модулями нужно найти в интернете статью с описанием и примерами. Подробное описание к самым популярным модулям можно найти в базе примеров к набору GyverKIT, а также у меня в каталоге ссылок на Ардуино-компоненты. Примеры таких модулей:
Давайте вкратце рассмотрим самые распространённые интерфейсы и особенности подключения модулей с ними. Напомню распиновку плат Arduino Nano и Wemos Mini:
Основные ошибки в логе Arduino IDE
- Проверить и сменить USB порт
- Попытаться переустановить драйвер
- Проверить пайку USB разъема на плате программатора
- Проверить наличие и целостность элементов вблизи usb разъема программатора, кварцевый резонатор
- Возможно программатор криво прошит – при возможности попытаться перепрошить
- Возможно микроконтроллер на плате программатора – брак или же мертв, попытаться заменить и прошить
avrdude: error: program enable: target doesn't answer. Причина – usbasp не видит подключаемый микроконтроллер
- Проверить правильность и целостность соединения с МК
- Попытаться снизить частоту прошивки, джампером или же указав более низкую скорость в среде программирования
- Проверить пайку разъема 10 pin и переходника 10 pin – 6 pin
- Возможно прошиваемый микроконтроллер попался с браком, или же мертв.
Загрузка скетча
В Arduino IDE можно зашить скетч через программатор, для этого надо нажать Скетч > Загрузить через программатор. Это очень удобно в том случае, когда МК используется без загрузчика, или просто голый МК.
Перевод модуля в режим ручного ввода AT команд
Пример входа в режим ввода AT команд в мониторе порта Arduino. После каждой команды необходим символ новой линии или возврата каретки. Скорость передачи должна быть выставлена на 9600 бод.
Видео

Микроконтроллер – очень универсальная штука, его можно научить взаимодействовать практически с любым другим электронным устройством: аналоговые датчики, цифровые датчики, всякие разные микросхемы, дисплеи, драйверы, контроллеры… Чтобы схема работала, входящие в неё компоненты нужно правильно соединить между собой. В этом уроке мы рассмотрим подключение электронных модулей.
Avrdudeprog
- Чтение/запись/очистка flash памяти
- Чтение/запись/очистка eeprom памяти
- Полная очистка чипа
- Калькулятор фьюзов и локбитов (чтение/запись)
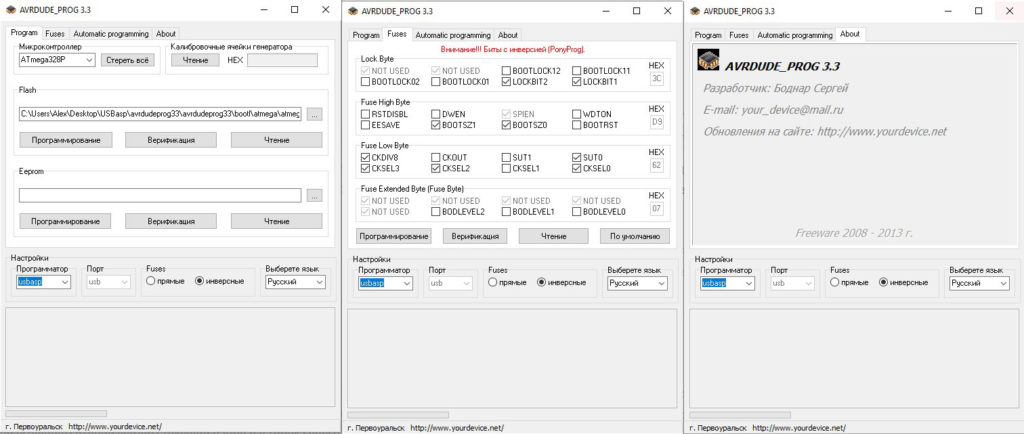
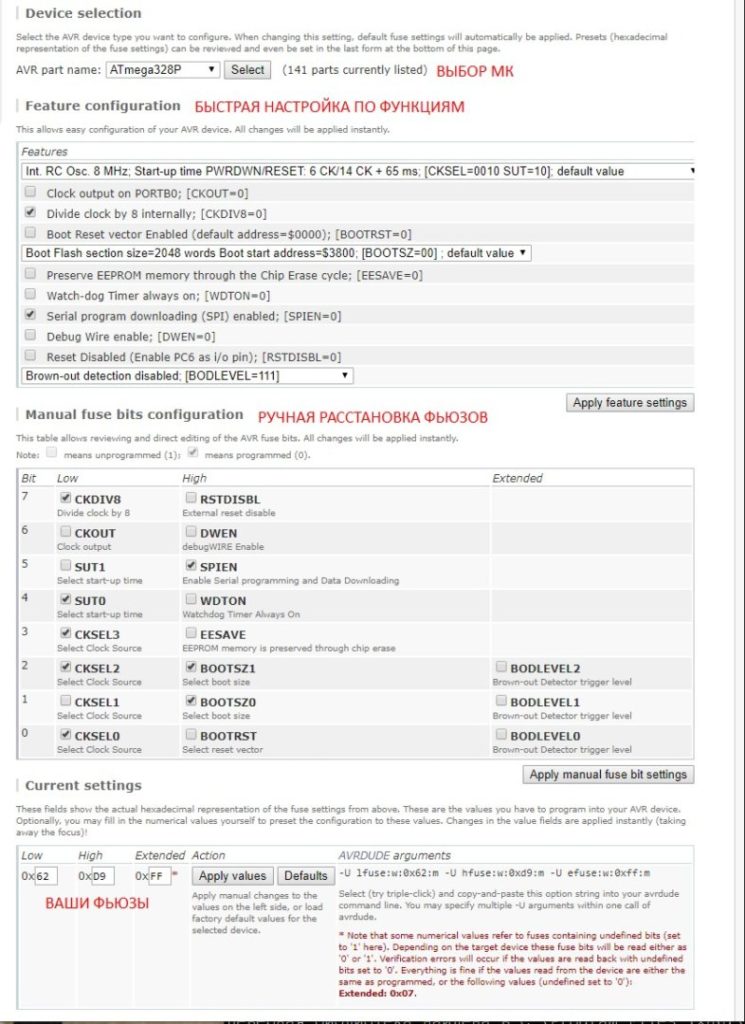
Более подробный обзор на avrdudeprog можно посмотреть здесь . Давайте посмотрим на калькулятор фьюзов. Выбираем свой микроконтроллер и программатор (можно добавить другие модели микроконтроллеров и программаторов, читай тут). Переходим во вкладку Fuses, нажимаем прочитать. При успешном чтении увидим текущий набор настроек своего чипа. Можно их поменять и загрузить. Важно! Галку инверсные биты не трогаем! Лок-биты и отключение RST заблокирует микроконтроллер, не трогайте их, если такой цели нет! Можно загружать прошивку или загрузчик из .hex файла, указав путь к ней на первой вкладке в окне Flash. Очень удобная утилита для низкоуровневой работы с МК.
Параметры
При обозначении параметров UART принято использовать короткую запись ЦИФРА-БУКВА-ЦИФРА
- ЦИФРА — количество бит в кадре
- от 5 до 9 бит. Обычно 8.
- N - None (Отсутствует) без бита чётности
- E - Even (Чётный). Проверка данных на чётность. Перед стоп-битом в кадр добавляется бит: 0 если в кадре было нечётное количество единиц, 1 — если чётное.
- O - Odd (Нечётный). Проверка данных на нечётность. Перед стоп-битом в кадр добавляется бит: 1 если в кадре было нечётное количество единиц, 0 — если чётное.
- 1, 1.5, 2. Продолжительность стоп-бита (1, 1.5 или 2 битовых интервала)
Загрузчик (bootloader)
Загрузчик живёт в самом конце Flash памяти МК и позволяет записывать прошивку, отправляемую через UART. Загрузчик стартует при подаче питания на МК, ждёт некоторое время (вдруг кто-то начнёт слать код прошивки по UART), затем передаёт управление основной программе. И так происходит каждый каждый раз при старте МК.
- Загрузчик позволяет прошивать МК через UART;
- Загрузчик замедляет запуск МК, т.к. при каждом запуске ждёт некоторое время для потенциальной загрузки прошивки;
- Загрузчик занимает место во Flash памяти. Стандартный старый для Arduino NANO занимает около 2 кБ, что весьма существенно!
- Именно загрузчик мигает светодиодом на 13 пине при включении, как индикация работы.
Фьюзы
Конфигуратор платы в Arduino IDE устроен следующим образом: каждой плате в Инструменты > Плата соответствует свой набор настроек, включая фьюзы, которые прошиваются вместе с загрузчиком . Некоторые из них:
- Загрузчик (путь к файлу)
- Скорость загрузки (через загрузчик)
- Объем доступной flash и sram памяти
- Весь набор фьюзов и лок-биты
Файл конфигурации называется boards.txt и найти его можно в папке с ядром Arduino: C:\Program Files (x86)\Arduino\hardware\arduino\avr\boards.txt. Документацию на boards.txt можно почитать здесь. При желании можно вывести нужные фьюзы через калькулятор (читайте выше), изменить их в boards.txt (главное не запутаться, для какой выбранной конфигурации платы делается изменение) и прошить в МК, нажав Инструменты > Записать загрузчик.
- Фьюзы подписаны как low/high/extended fuses, можно вставлять полученное в калькуляторе значение.
- Локбиты работают следующим образом: unlock_bits это локбиты, которые прошьются до записи загрузчика (при нажатии на кнопку Записать загрузчик). А вот после прошивки загрузчика будут автоматически прошиты lock_bits, которые и определят доступ к памяти контроллера во время его работы. Чтобы защитить прошивку от чтения – ставим lock_bits 0x3C.
![]()
Такая работа с фьюзами максимально неудобна, но есть и другие варианты:
- Ядро GyverCore для atmega328, в нем мы сделали кучу готовых настроек фьюзов прямо в настройках платы, читайте в уроке про GyverCore. Несколько загрузчиков, включая вариант без загрузчика, выбор источника тактирования и другие настройки в один клик мышкой.
- Программа AVRdudeprog, про нее поговорим ниже
AT команды модуля:
Для перехода в режим AT команд необходимо притянуть вывод S модуля к земле (логическому нулю). Для входа в режим AT команд модулю необходимо 40 миллисекунд. Для выхода из режима AT команд модулю необходимо 80 миллисекунд.
тестовая команда, при удачном выполнении модуль возвращает "OK"
Команда установки скорости обмена данными с микроконтроллером, где "xxxx" это скорость. Может быть 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200. Пример:
AT+B4800, при удачном выполнении модуль вернёт "OK+B4800"
Команда смены канала, "xxx" - номер канала (001-100). Значение по умолчанию 001. Пример: "AT+C042" сменит канал на 42 и рабочая частота станет 449,8 МГц. Приёмник модуля очень чувствительный и при использовании на скорости больше 9600 бит в секунду или если модули находятся на небольшом расстоянии друг от друга каналы лучше использовать через один, так как возможны перекрёстные помехи на соседних каналах.
Команда смены режима работы модуля. По умолчанию FU3. Для передачи данных модули должны находится в одном режиме.
Команда установки уровня мощности передатчика, "x" - от 1 до 8 по следующей таблице:
X 1 2 3 4 5 6 7 8 Мощность (дБм) -1 2 5 8 11 14 17 20 Чем выше мощность, тем больше расстояние излучения модуля. При уменьшении мощности на 6 дБ рабочее расстояние уменьшается в 2 раза. Значение по умолчанию - 8.
Запрос одного параметра модуля, где "y": B - запросить скорость передачи данных, C - запросить канал, F - запросить режим работы и P - запросить мощность передатчика. Например: при запросе"AT+RB" модуль ответит "OK+B9600".
Запросить все параметры модуля.
Установка параметров передачи данных. Биты данных, бит чётности, стоп-бит. Например, чтобы установить 8 бит данных, бит чётности и 1 стоп-бит посылаем модулю "AT+U8E1", модуль ответит "OK".
Запросить версию прошивки. При запросе "AT+V" модуль ответит "www.hc01.com HC-12 v2.6"
Перевод в режим сна. Потребляемый ток в данном режиме 22 микроампера. Передача данных в данном режиме невозможна
Сброс параметров модуля на значения по умолчанию
Установка модуля в режим ожидания обновления прошивки
ISP программатор
Пример тестирования модуля и сброса настроек на заводские.
Данный скетч сбрасывает настройки модуля на заводские и включает встроенный светодиод Arduino если получен положительный ответ от модуля.
Подключение модуля через USB-UART преобразователь
Пример дистанционной отправки команд Arduino, при этом один модуль подключён к ПК через USB-UART преобразователь, второй подключён к Arduino на которую загружен этот скетч. При отправке ключевого слова "toggle" из монитора последовательного порта встроенный светодиод платы будет менять своё состояние.
UART на Arduino:
На Arduino и Arduino-совместимых платах аппаратный UART обозначается символами RX и TX рядом с соответствующими выводами. На Arduino UNO/Piranha UNO это 0 и 1 цифровые выводы:
Способ - 3 : Используя Trema Set Shield
В примерах ниже мы будем использовать программный UART на 8 и 9 цифровых выводах, поэтому для удобства подключения можно установить модуль в 3-ю ячейку Trema Set Shield. Так же на этих выводах находиться аппаратный порт Piranha ULTRA, что ещё больше упрощает работу с модулем.
![]()
Arduino UNO/Piranha UNO
![]()
В скетче инициализируется функцией begin() в коде функции setup():
Пример:
Решение проблем
Для прошивки микроконтроллера, тактирующегося низкой частотой (менее 1 МГц внутренний клок):
- Arduino ISP: нужно изменить частоту загрузки прошивки в скетче Arduino ISP и снова прошить его в ардуино-программатор (см. строку в скетче 45 и ниже);
Подробнее о UART:
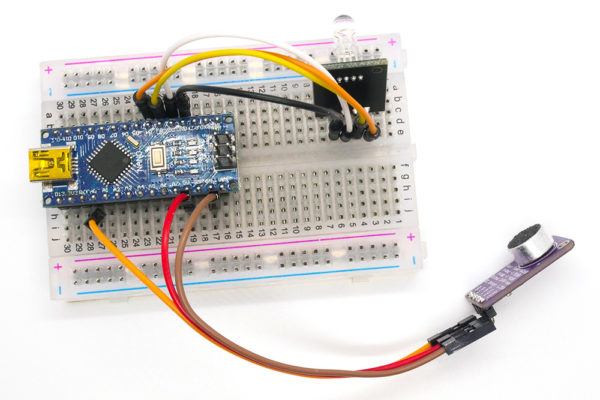
Макетная плата
Макетная плата, она же макетка или брэдборд (breadboard) – самый удобный способ создания электронных макетов. Отверстия расположены со стандартным шагом 2.54мм, внутри каждого – пружинная клемма. Это позволяет вставлять в плату любые Arduino-модули, а также микросхемы в DIP корпусах.
Для соединения отверстий в пределах макетки используются провода штырёк-штырёк, рекомендую вариант с цилиндрическими штекерами (я пользуюсь одним комплектом на протяжении уже 5-ти лет). Также существуют провода с квадратными штекерами, они есть в вариантах гнездо-гнездо, гнездо-штырёк и штырёк-штырёк. Эти провода менее качественные, но вариант гнездо-штырёк позволяет подключить модуль к макетке, не втыкая модуль в макетку:
![blank]()
Что происходит на этом фото и как работает брэдборд? Очень просто! Контакты в нём соединены следующим образом:
![blank]()
Способ - 1 : Используя провода, Piranha UNO и программный UART
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO.
![]()
Аналоговые
У аналоговых модулей помимо питания есть аналоговый выход, может быть маркирован как OUT, S, A или AO. Такие модули выдают аналоговый сигнал, пропорциональный показанию датчика. Подключаются к питанию и любому аналоговому пину (ADC) и опрашиваются стандартными средствами Arduino.
Примеры на картинке ниже: датчик звука, уровня жидкости, индуктивный датчик влажности почвы, обычный датчик влажности почвы, потенциометр (просто крутилка).
Спецификация:
- Рабочая частота: 433 МГц
- Коэффициент стоячей волны:
- Импеданс: 50Ω
- Длина с коаксиальным шнуром: 10 . 15 см
- Разъём: IPEX
Все модули линейки "Trema" выполнены в одном формате
Кадрирование данных
При приёме-передаче данных каждое устройство ориентируется на своё внутреннее тактирование. Обычно это тактирование от 8 до 16 раз быстрее скорости передачи данных и обычно отсчитывается от стартового бита. Именно поэтому необходимо чтобы оба устройства были настроены на одну и ту же скорость передачи.
Так же при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит. Старт-бит сигнализирует о начале передачи данных и стоп-бит, соответственно об окончании.
Рассмотрим кадр данных:
При разговорах о серийный протоколах принято использовать такие слова как кадр и пакет. Кадр - интервал от старт-бита до стоп-бита. Пакет - количество кадров полезных данных. При этом не стоит путать кадр и байт: байт - это только сами данные, не включающие в себя синхронизирующие и проверочные биты.
Старт-бит:
При отсутствии передачи линия удерживается в состоянии логической единицы (в случае TTL Arduino это 5 вольт или Vcc). Как только передающее устройство притягивает линию к 0 (GND или 0 вольт в случае Arduino), это сигнализирует принимающему устройству о том что сейчас будет передача данных.
Данные:
При появлении старт-бита на линии принимающее устройство начинает отсчитывать время в соответствии с установленной скоростью и считывать состояния линии через определённые промежутки времени в соответствии с установленным количеством бит данных, после этого.
Стоп-бит:
По завершении передачи данных принимающее устройство ожидает стоп-бит, который должен быть на уровне логической единицы. Если по завершении кадра удерживается логический ноль, значит данные неверны. Если логический ноль удерживается время, превышающее длину кадра в 1,5 раза, такое состояние именуется break (разрыв линии, исторически пошло от устройств, использующих токовую петлю для передачи данных). Некоторые передатчики вызывают это состояния специально перед посылкой пакета данных. Некоторые приёмники считают такое состояние за неправильно выставленную скорость и сбрасывают свои настройки на установки "по умолчанию".
Электронный модуль
Модуль – это специальная удобная плата на базе какой-то микросхемы или электронного компонента. Модуль может быть датчиком, драйвером, интерфейсом, памятью, дисплеем и так далее. Зачем использовать модуль, почему не взять конкретный компонент? Если вы хотите делать электронное устройство на печатной плате – конечно же лучше собирать его из голых компонентов, а не из модулей, потому что в большинстве случаев это выйдет дешевле, а также изготовление такой платы можно заказать вместе со сборкой на производстве (например на JLCPCB). Но мы с вами собираемся сначала научиться программировать, поэтому модули имеют неоспоримые преимущества:
- Основная концепция Ардуино – электронный конструктор, быстрое и простое создание прототипов электронных устройств без помощи паяльника.
- Микросхема очень маленькая, подключать её к чему-то – не очень приятная затея. У модуля выведена рейка для подключения проводов и работы на макетной плате.
- Чтобы подключить голую микросхему – понадобится изучить документацию. У модуля все нужные для подключения пины выведены и подписаны.
- Для корректной работы большинства микросхем требуются дополнительные компоненты (драйверы, контроллеры, резисторы, стабилизаторы, конденсаторы, индуктивности, кварцевые генераторы), посчитанные, выбранные и установленные согласно документации. На плате модуля всё это уже есть.
- У некоторых модулей на плате предусмотрена настройка: крутилки, джамперы, переключатели, перемычки для спайки паяльником.
Работа в Arduino IDE
KY-модули
Существует также целое семейство модулей с названием KY-цифра, это самые дешёвые модули на чёрных платах. Среди них есть и цифровые, и аналоговые, и интерфейсные датчики, а также индикация (светодиоды, пищалки) и реле. Проблема в том, что пины почти у всех плат подписаны одинаково:
- – (минус) – минус, GND
- Средний пин без подписи – плюс, VCC
- S – сигнал
![blank]()
Сигналом здесь может быть как исходящий из датчика цифровой или аналоговый сигнал, так и цифровой сигнал управления, который нужно подать на модуль с микроконтроллера. Обязательно читайте описание к модулю такого типа, если не знаете, что делает компонент на его плате!
![blank]()
Как убрать загрузчик?
Питание:
![]()
Программатор
Помимо записи прошивки во flash память, программатор позволяет:
- Считывать содержимое Flash памяти (скачать прошивку на компьютер)
- Полностью очищать чип от всех данных и настроек
- Записывать и читать загрузчик
- Считывать/записывать EEPROM память
- Читать и настраивать фьюзы (fuses, fuse-bits) и лок биты.
Программатор – ваш единственный друг при работе с “голым” микроконтроллером, то есть для его низкоуровневой настройки и загрузки прошивки.
Методы связи
UART позволяет одновременно передавать и принимать данные, однако не всегда это возможно или нужно. Например, если Вам нужно только получать не критические данные (которые можно проверить следующим пакетом, например расстояние, посылаемое лидаром каждые несколько сотен миллисекунд) от цифрового датчика или любого другого устройства и не нужно ничего передавать, такой метод называется симплексным. Всего различают три метода связи:
USB-TTL (UART)
Этот способ реализован прямо на платах Arduino при помощи USB-TTL (USB-UART) преобразователя, именно поэтому мы можем подключить плату к компьютеру и загрузить код. USB-TTL позволяет только загрузку данных во flash, остальные возможности (как у ISP программатора) ему недоступны. В то же время он ограничен только возможностями загрузчика, но в этом уроке мы рассматриваем только стандартные. Также USB-TTL мост позволяет микроконтроллеру общаться с компьютером по последовательному соединению (тот самый Serial и монитор com порта). Есть платы без бортового USB-TTL, например Arduino Pro Mini. Для работы с ними нужно купить внешний USB-TTL преобразователь. Также загрузка прошивки через UART возможна и в “голый” микроконтроллер при условии наличия там загрузчика, который запишет принятый код во flash. Про запись загрузчика мы поговорим ниже. UART “загружатор” подключается к пинам RX и TX Ардуино (или микроконтроллера), RX->TX и TX->RX, также обязательно подключается земля GND. Если у прошиваемой платы нет своего питания, то подключается и питание. Загрузчик отрабатывает при запуске МК, поэтому непосредственно перед загрузкой прошивки МК должен быть сброшен (перезагружен), и для этого на платах USB-UART есть вывод DTR (Data Terminal Ready), который подключается к пину RST Reset и собственно выполняет сброс перед перед загрузкой прошивки. На платах Pro Mini есть отдельный пин DTR.
USB-TTL Arduino DTR DTR RX TX TX RX GND GND VCC/5V/3.3V VCC Китайцы выпускают USB-TTL модули в широком ассортименте, но в целом они все одинаковые по своей сути. Ссылка на результат поиска на aliexpress, и ссылка на все USB-TTL в моём любимом магазине WAVGAT. Что использую я? В основном платку на CP2102. Перед заказом модуля обязательно убедитесь в том, что у него есть выход DTR, иначе этот модуль можно будет использовать только для “общения” с контроллером через COM порт. Для работы с таким преобразователем нужно установить драйвер для чипа, на базе которого собран модуль, это может быть CP2102, CH340/341, FT232, PL2303 и другие. Прошивка загружается как обычно: выбираем порт, на котором сидит преобразователь, версию загрузчика и жмём загрузить, всё! Важный момент: на некоторых китайских версиях плат Arduino Pro Mini не распаян пин DTR, т.е. он не идёт на RST и автоматический сброс перед загрузкой прошивки не выполняется. В этом случае сброс нужно производить вручную, кнопкой RST, непосредственно перед загрузкой прошивки… Загрузка прошивки посредством загрузчика (bootloader) возможна с любого UART устройства, даже через Bluetooth. Но об этом мы поговорим в отдельном уроке.
Пример переключения каналов модуля.
Пример смены канала передатчика. Передаётся байт на 1-м канале, затем канал переключается и передаётся байт на 3-м канале.
Одинаковый скетч для двух приёмников. Приёмники должны быть установленны на 1-й и 3-й каналы.
Если в последовательный порт приходит байт 0xAA, встроенный светодиод включается. Если приходит любой другой байт, светодиод выключается. Канал модуля должен быть 001 или 003. Выставить канал можно при помощи скетча выше "Перевод модуля в режим ручного ввода AT команд". Для этого из монитора порта необходимо ввести AT+C001 и enter для одного модуля и AT+C003 и enter для другого. Так же это можно сделать автоматически, при помощи скетча "Пример тестирования модуля и сброса настроек на заводские" заменив при этом команду AT+DEFAULT на AT+C003 для одного из модулей.
![]()
В этом уроке мы рассмотрим загрузку прошивки в ардуино через внешние “программаторы”. Давайте вспомним, о чем уже говорили в одном из первых уроков: загрузка прошивки в Arduino возможна двумя способами:
- “Напрямую” во flash память микроконтроллера при помощи ISP (In System Programming) внутрисистемного программатора.
- При помощи загрузчика (bootloader), который живёт в конце Flash памяти МК, принимает программный код по протоколу TTL (UART) и записывает его во Flash память.
Способ - 5 : Напрямую к ПК через USB-UART
Используя USB-UART преобразователь Piranha можно подключить напрямую к ПК. При этом можно получать данные и отправлять команды на Arduino по радиоканалу, как если бы Arduino была подключена по проводу. Пример скетча для данного подключения.
![]()
Способ - 4 : Используя проводной шлейф и Shield
Используя 2-х и 3-х проводные шлейфы, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
![]()
“Простые” модули
Программный UART на Arduino
Помимо аппаратного UART в Arduino можно использовать программный. Программный порт хорошо подходит для простых проектов, не критичных к времени работы кода или для отладки проектов, позволяя не отключать модули использующие UART во время загрузки сетчей. При его использовании нужно лишь помнить что никакой другой код не может выполняться пока программа занимается считыванием данных из него и передача может осуществляться только в полудуплексном или симплексном режимах. Так же на программный RX можно назначать только те выводы, которые поддерживают прерывание по смене уровней. На UNO, например, это все цифровые выводы, кроме 13-го. Прежде чем собирать свой проект, проконсультируйтесь с инструкцией к конкретной плате.
Пример использования программного порта:
Далее к программному порту нужно обращаться через объект mySerial . Например: mySerial.write(data); .
Видео:
Альтернативный метод:
В качестве альтернативного метода можно воспользоваться двумя шинами UART Arduino: аппаратной и программной. Аппаратная шина используется для подключения Arduino к USB порту компьютера, а программная шина UART используется для подключения модулей к плате Arduino.
Вы просто загружаете скетч, подключаете Arduino к USB порту компьютера, а устройство к выводам указанным в скетче (в примере: вывод D2 это RX - подключается к выводу TX устройства, вывод D3 это TX - подключается к выводу RX устройства).
Этот метод не требует подключения вывода RESET к GND на плате Arduino и не требует установки программы терминал на компьютер.
Управление подключёнными устройствами осуществляется через монитор последовательного порта Arduino IDE (для передачи AT-команд не забудьте установить пункт - добавлять символы NL & CR в нижнем правом углу монитора последовательного порта).
Trema-модуль HC-12 - это беспроводной полудуплексный модуль UART позволяющий передавать и принимать данные в диапазоне частот от 433,4 МГц до 473МГц на скорости от 1200 до 115200 бод.
Piranha ULTRA
На Piranha ULTRA присутствуют два аппаратных UART. Один на тех же выводах, что и UNO, второй на 8 (RX) и 9 (TX) выводах:
![]()
В Arduino IDE второй аппаратный UART называется Serial1 (Сериал один), и инициализируется так же как и первый:
Простой пример для копирования буфера первого UART'а во второй и наоборот:
Пример соединения двух UNO:
![]()
Подключение:
У каждого устройства, поддерживающего UART обычно обозначены два вывода: RX и TX. TX — означает transmit (передаю), RX — receive (принимаю). Отсюда становится понятно что RX одного устройства нужно подключать к TX другого. Если Вы подключите RX одного устройства к RX другого, то оба устройства будут слушать друг друга, вы соединили их входы. Если соединить TX и TX - это уже более опасно, это выходы низкого сопротивления устройств и если на одном будет логическая единица, а на втором ноль — по проводу пойдёт ток короткого замыкания (это зависит от конкретной программной или аппаратной реализации). Хотя в современных чипах от этого есть защита, на всякий случай, не стоит на неё ориентироваться. Так же необходимо объединить референсные уровни двух устройств (GND-GND), если не подразумевается гальваническая развязка.
![]()
Смешанные
Некоторые модули имеют цифровой и аналоговый выходы одновременно, пины у них обычно подписаны как DO – цифровой выход и AO – аналоговый. Крутилка на плате настраивает порог срабатывания у цифрового выхода, а аналоговый просто выдаёт “сырой” сигнал с датчика. Опрашиваются как цифровые и аналоговые датчики соответственно.
Общая схема для всех перечисленных выше типов модулей:
![blank]()
Примеры на картинке ниже: датчик вибрации, звука, магнитного поля, влажности почвы и освещённости.
Подробнее о модуле:
Модуль работает в диапазоне частот от 433,4 МГц до 473МГц, имеет возможность выбора каналов от 1 до 100, возможность выбора восьми вариантов мощности передатчика от -1 дБм до 20 дБм при этом расстояние передачи может достигать 1000 метров на открытой местности при скорости передачи данных в эфире 5000 бит/с.
Модуль является полудуплексным, это означает что он может принимать или отправлять данные.
Подключение:
Trema-модуль HC-12 подключается к Arduino по шине UART (можно использовать как аппаратную так и программную шину).
- Вывод модуля TX подключается к аппаратному (фиксированному) или программному (назначенному) выводу RXArduino. Это линия шины UART для передачи данных от модуля к Arduino.
- Вывод модуля RX подключается к аппаратному (фиксированному) или программному (назначенному) выводу TXArduino. Это линия шины UART для передачи данных в модуль от Arduino.
- Вывод модуля S подключается к любому выводу Arduino номер которого указывается в скетче. Это линия перевода модуля в режим AT-команд. Модуль будет воспринимать AT-команды, только во время подачи на этот вывод низкого уровня.
Модуль удобно подключать 4 способами, в зависимости от ситуации:
Использование Arduino как USB-UART преобразователь:
На платах Arduino c USB портом (у некоторых плат нет USB порта) уже есть USB-UART преобразователь на базе чипа CH340 или FTDI, или ATmega, или др. Шина USB этих чипов подключена к порту USB, а шина UART к аппаратным выводам TX и RX контроллера платы Arduino.
Всё что нужно сделать для работы платы Arduino в качестве USB-UART преобразователя, это отключить её контроллер от шины UART или заставить его не реагировать на сигналы проходящие по этой шине. Сделать это можно соединив вывод RESET с выводом GND платы Arduino.
Теперь плату Arduino можно подключить к USB порту компьютера, а внешние устройства к выводам TX и RX платы Arduino (обычно это выводы 0 и 1). Обратите внимание на то, что выводы устройств подключаются к плате, не TX к RX, RX к TX, а TX к TX, RX к RX (так как вывод TX чипа преобразователя на плате Arduino подключён к выводу RX самой платы, а вывод RX чипа подключён к выводу TX платы).
Для управления подключённым устройством нужно установить на компьютер программу терминал. Одним из таких терминалов является свободно распространяемая программа Termite с поддержкой Русского языка.
Arduino as ISP
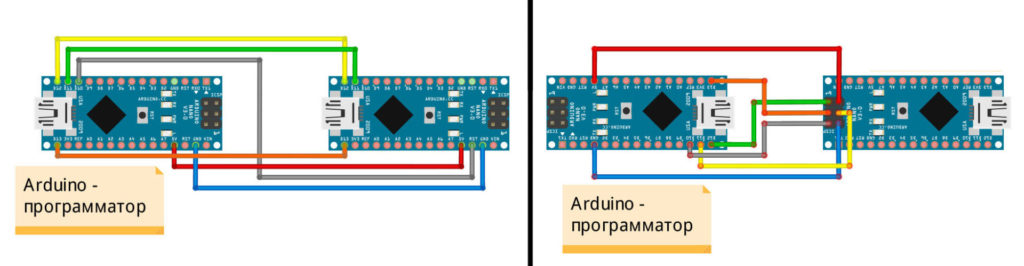
Почти любая другая плата Arduino может стать ISP программатором, для этого нужно просто загрузить в неё скетч ArduinoISP:
- Открыть скетч Файл > Примеры > 11. ArduinoISP > ArduinoISP
- Всё! Ваша Arduino теперь стала ISP программатором
- Подключаем к ней другую Arduino или голый чип по схеме ниже
- Выбираем Arduino as ISP в Инструменты > Программатор
- И можем писать загрузчики, фьюзы или загружать прошивку напрямую во Flash
![]()
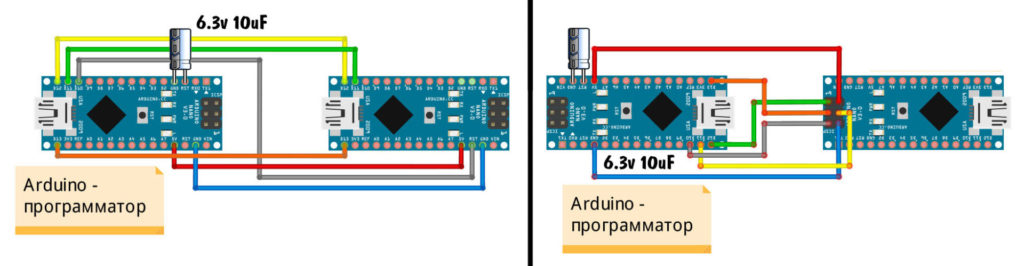
ISP программатор подключается к четырем пинам микроконтроллера, не считая питания: один из пинов передает сброс, остальные – для передачи данных. Чтобы плата-программатор не сбрасывалась при загрузке, на неё нужно:
- Либо поставить поставить конденсатор ёмкостью ~10 мкФ между RST и GND (рекомендуется)
- Либо просто закоротить пины RST и 5V проводом
![]()
По использованию других плат Arduino в качестве программатора читай на официальном сайте.
Arduino MEGA
У Arduino MEGA, помимо UART'a на цифровых выводах 0 и 1 как и у UNO, присутствуют ещё три аппаратных UART. На плате это выводы 19 (RX1), 18 (TX1), 17 (RX2), 16 (TX2) и 15 (RX3), 14 (TX3) соответственно. UART совместимый по расположению с UNO обозначен RX0, TX0:
![]()
На заметку: На многих Arduino и Arduino-совместимых платах UART0 используется для загрузки скетчей, так что если Ваш скетч не загружается, проверьте эти выводы. Во время загрузки скетча к ним ничего не должно быть подключено.
Прошивка загрузчика
Из Arduino IDE при помощи ISP программатора мы можем записать другой загрузчик (по факту загрузчик + фьюзы) и загрузить скетч, а также настроить/прошить фьюзы и лок-биты, но не очень удобным способом. Когда мы выбираем плату в Инструменты > Плата и загрузчик в Инструменты > Плата (загрузчик, bootloader), Arduino IDE автоматически делает “активным” нужный загрузчик. Нажимая Инструменты > Записать загрузчик мы прошиваем загрузчик, соответствующий выбранной плате и её настройкам. Также одновременно с загрузчиком прошиваются фьюзы и лок-биты, соответствующие выбранной плате в Arduino IDE. Как и где их поменять, смотрите чуть ниже. Рассмотрим на примере записи загрузчика для atmega328, стоящей на китайской плате Arduino NANO. На данный момент китайцы прошивают в МК старую версию загрузчика, которая называется old bootloader в меню платы. Оригинальные платы идут с более современным загрузчиком, поэтому при работе с китайскими платами нам приходится выбирать old bootloader для загрузки прошивки через бортовой usb порт. Подключим usbasp по схеме выше, выберем его как программатор в Инструменты > Программатор, выберем плату Arduino NANO, загрузчик для atmega328 (первый в списке). Нажмём записать загрузчик. Всё! Теперь плату можно шить через бортовой usb порт, выбирая первый загрузчик. Он кстати легче, быстрее “прошивает” и сама прошивка быстрее “запускается”.
Режимы работы модуля
Модуль имеет четыре режима работы: FU1, FU2, FU3, FU4 и режим приём AT команд. Для перехода в режим приёма AT команд вывод S модуля необходимо прижать к земле (режим логического "0"). Режимы FU отвечают за приём и передачу данных последовательного порта.
Режим FU1 - режим относительно низкого энергопотребления, с током покоя 3,6 мА. В этом режиме можно выбирать скорость передачи данных по проводу arduino-модуль, но скорость в эфире постоянна и равна 250`000 бит/сек.
Режим FU2 - режим очень низкого энергопотребления, с током покоя 80 мкА. В этом режиме скорости передачи данных могут быть 1200, 2400 и 4800 бит/сек. Скорость в эфире фиксирована и равна 250`000 бит/сек. В этом режиме интервал между пакетами данных должен быть больше 1 секунды, иначе данные будут потеряны.
Режим FU3 - режим по умолчанию, потребляемый ток покоя 16 мА, скорость передачи данных в эфире автоматически переключается в зависимости от скорости проводного последовательного порта по следующей таблице:
Скорость передачи по проводу, бит/сек 1`200/2`400 4`800/9`600 19`200/38`400 57`600/115`200 Скорость передачи в эфире, бит/сек 5`000 15`000 58`000 236`000 Чем ниже скорость передачи по проводу — тем больше расстояние передачи модуля.
Режим FU4 - режим максимальной дальности, ток покоя 16 мА, поддерживает только одну скорость передачи равную 1200 бит/сек при этом скорость передачи в эфире уменьшается до 500 бит/сек, для наибольшей дальности связи. В этом режиме можно передавать не больше 60 байтов за раз, при этом интервал между пакетами должен превышать 2 секунды во избежание потерь данных.
Таблица режимов
Режимы: FU1 FU2 FU3 FU4 Комментарий Ток покоя 3,6 мА 80 мкА 16 мА 16 мА Среднее значение Задержка передачи 15-25 мс 500 мс 4-80 мс 1000 мс Передача одного байта Дальность передачи, W = 20 дБм до 100 м до 100 м до 600м на 9600 бит/сек; до 1000 метров на 2400 бит/сек до 1800 метров на 1200 бит/сек Прямая видимость и идеальные условия, зависит от антенны. Для того чтобы модули могли связаться друг с другом у них должен быть выставлен одинаковый режим работы и скорость.
Чувствительность приёмника
Чувствительность приёмника модуля зависит от скорости передачи данных по следующей таблице:
Скорость передачи в эфире 5`000 бит/сек 15`000 бит/сек 58`000 бит/сек 236`000 бит/сек Чувствительность приёмника -117 дБм -112 дБм -107 дБм -100 дБм UART на Raspberry Pi:
На Raspberry Pi UART находится на выводах колодки 8 - TX (GPIO14) и 10 - RX (GPIO15)
![]()
Перед работой с последовательным портом необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> Serial Port
Пример работы с последовательным портом на Python:
Данный пример выводит строку "iArduino.ru" в последовательный порт Raspberry и ждёт данных из последовательного порта.
Способ - 2 : Используя провода, Piranha ULTRA и аппаратный UART
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha ULTRA.
С данным подключением будет использоваться второй аппаратный UART на Piranha ULTRA. Стоит заметить, что программный порт на UNO безошибочно работает на скорости до 57600 бод, в то время как аппаратный без проблем может работать на скорости 115200, вдвое большей.
![]()
Фьюзы (Pro)
Фьюзы (фьюз-биты) являются низкоуровневыми настройками микроконтроллера, которые хранятся в специальном месте в памяти и могут быть изменены только при помощи ISP программатора. Это такие настройки как выбор источника тактирования, размер области памяти под загрузчик, настройка отсечки по напряжению и прочее. Фьюз-биты собраны по 8 штук в байты (т.н. байты конфигурации), как типичный регистр микроконтроллера AVR. Таких байтов может быть несколько, они называются low fuses, high fuses, extended fuses. Для конфигурации байтов рекомендуется использовать калькулятор фьюзов (например, вот такой), в котором просто ставятся галочки на нужных битах, и на выходе получается готовый байт в hex виде. Рассмотрим на примере ATmega328p:
![]()
Важный момент: в AVR биты у нас инверсные, то есть 1 это выкл, 0 это вкл. Расставляя галочки в калькуляторе, мы формируем байт, галочка стоит – бит включен, но в результирующем байте включенные биты являются нулями. Об этом стоит задумываться при ручном составлении фьюз-байта, при использовании калькулятора можете об этом даже не вспоминать. Что позволяют настроить биты?
- CKSEL0–CKSEL3 – выбор источника и частоты тактирования (уточняй в даташите на свой МК, какая конфигурация за что отвечает)
- SUT0–SUT1 – задержка старта МК после перезагрузки
- CKOUT – дублирование тактирования на один из пинов (см. в даташите на какой)
- CKDIV8 – делит тактовую частоту на 8
- BOOTRST – если включен, МК запускается с загрузчика
- BOOTSZ0–BOOTSZ1 – задаёт размер сектора загрузчика
- EESAVE – защита EEPROM от стирания во время выполнения полной очистки чипа
- WDTON – если включить, то Watchdog будет принудительно включен без возможности отключения
- SPIEN – опасный бит , при его отключении пропадает возможность прошивки через ISP, и возможность выключить этот бит в том числе*
- DWEN – вкл/выкл отладочный интерфейс DebugWire. На других моделях бывает и JTAG, и его бит – JTAGEN
- RSTDISBL – опасный бит , при его включении можно использовать ногу RST как обычный цифровой пин, но пропадает возможность прошивки через ISP и выключить этот бит как следствие*
- BODLEVEL0–BODLEVEL3 – настройка контроля напряжения (МК сбросится при падении ниже установленного напряжения)
* – прошивка возможна при помощи высоковольтного программатора
Решение проблем
Решение большинства проблем с загрузкой через программатор (независимо от того, что написано в логе ошибки):
- Вытащить и обратно вставить usbasp в usb порт
- Вставить в другой usb порт
- Переустановить драйвер на usbasp
- Проверить качество соединения USBasp с МК
- Перепаять переходник и отмыть флюс
Для прошивки микроконтроллера, тактирующегося низкой частотой (менее 1 МГц внутренний клок):
- USBasp: на плате есть перемычка JP3, которая включает режим низкой скорости загрузки. В новых версиях прошивки для USBasp скорость выбирается автоматически, но китайцы продают старую версию. Как прошить новую – ищите в интернете.
Примеры:
Отладка проектов при помощи UART
Пример:
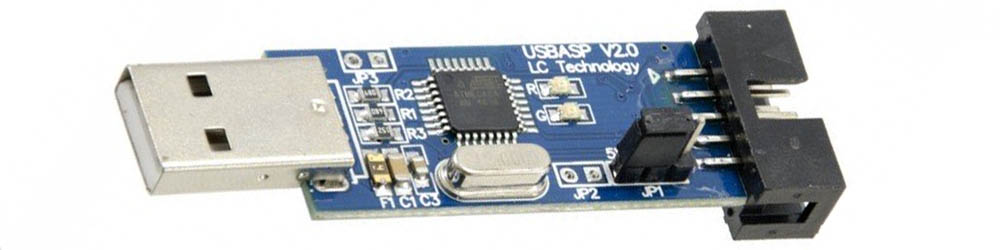
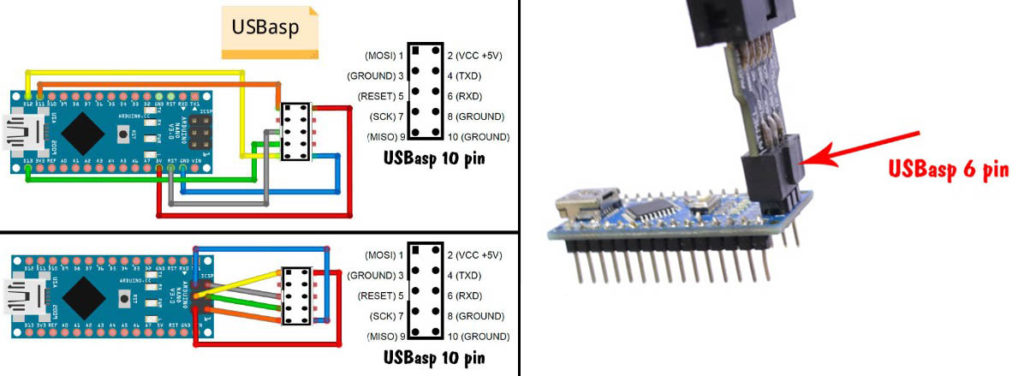
USBasp
Дешёвые ISP программаторы также есть в ассортименте у китайцев, рекомендую брать USBasp как самый распространенный. Поискать на алиэкспресс, мне нравится версия в корпусе. USBasp имеет не очень удобный выход 10-пин на шлейфе, поэтому рекомендуется купить также переходник 10-пин на 6-пин, который позволяет сразу подключаться к ISP header’у, который есть на большинстве плат Arduino. Внимание! Очень часто встречается брак в виде непропая контактов, поэтому во избежание проблем рекомендуется пропаять переходник и отмыть флюс (зубная щётка + бензин калоша).
![]()
Цифровые
Простые цифровые модули имеют два пина питания и пин с логическим выходом, он может быть подписан как OUT, S, D или DO. Плата таких модулей имеет синий цвет и содержит типовую схему – крутилка (синий корпус) и операционный усилитель (чёрная микросхема рядом с крутилкой). Такой модуль выдаёт только два состояния: датчик “сработал” и “не сработал”, на цифровом выходе появляется соответственно VCC (напряжение питания) или 0 Вольт, т.е. высокий и низкий цифровой сигнал. Крутилка на плате позволяет настроить порог срабатывания. Такие датчики подключаются к питанию и любому цифровому пину (GPIO). Опрашиваются стандартными средствами Arduino.
Примеры на картинке ниже: датчик звука, температуры, освещённости, приближения, магнитного поля.
Читайте также: