
Управление устройствами через usb
Мы хотим сделать так, чтобы наши устройства управлялись с компьютера программой и можно было использовать возможности компьютера для управления машиной. Для этого нам надо организовать связь по USB между нашим устройством и программой на компьютере.
Прежде чем приступить к этому вы должны были в предыдущей статье ознакомится с Управлением машиной и получить знания о том, что такое микроконтроллер AVR. Если этого не было, сделайте это.
Далее нам надо для связи по USB сделать устройство, программу для микроконтроллера AVR и программу для компьютера.
Содержание / Contents
↑ Схема электрическая принципиальная
Подготавливаем программу МК
Также надо прошить fuse-биты настроек микроконтроллера, чтобы изменить его тактовую частоту на совместимую с USB стандартом. Встроенной подходящей частоты нет, поэтому применяется внешний источник тактовой частоты 12 МГц. Для прошивки настроек fuse-битов устройство с программатором надо доработать, подключить к микроконтроллеру внешний кварцевый генератор 12 МГц и 2 конденсатора 20 пФ по схеме как на устройстве USB, т.е. в случае с ATTiny2313A к линиям PA1 и PA0, и также соединить это всё с минусом питания, вообщем как на схеме USB устройства, смотрите на фото ниже как подключено. Это нужно для того, чтобы устройство продолжило работу после установки для него нового источника тактового сигнала, именно этот источник 12 МГц и подключаем. Не забудьте кроме программы также прошить fuse-биты.
Технические характеристики
| Разрядность АЦП (бит) | 10 |
| Напряжение питания (В) | 5 |
| Количество встроенных реле управления (шт) | 4 |
| Количество линий ввода/вывода | 18 |
| Тип питания | постоянный, USB |
| Вес без упаковки, г | 70 |
| Вес с упаковкой, г | 113 |
Программа на компьютер для USB связи
Для начала сделаем простую консольную программу, потом будем делать программу с окнами.
3) Скачиваем программу MinGW, которая нужна для сборки программы из исходника. Устанавливаем. Сайт разработчика MinGW. После установки зайдите в Панель управления, Система, Дополнительные параметры системы, Дополнительно (вкладка), Переменные среды (кнопка), Системные переменные (список), Переменная Path (найти в списке, выделить, нажать кнопку Изменить). Дописываем в поле Значение переменной в конце ;c:\MinGW\bin\ и нажимаем ОК, надеюсь вы установили MinGW в C:\MinGW, иначе надо путь другой прописать.
Инструкции
Изменяем программы под наши нужды
Берём под контроль все порты, прибавляем свои функции. И так, теперь в C:\OpenRobo размещены исходные коды программы для компьютера, а в C:\OpenRoboFW исходные коды программы для микроконтроллера. Их можно изменять, но после каждого изменения надо их занова пересобирать (и перепрошивать микроконтроллер), делать это теперь вы умеете - см. выше пример - пересобрать обе программы можно 4-мя командами в cmd:
Камрад, рассмотри датагорские рекомендации
🌼 Полезные и проверенные железяки, можно брать
Опробовано в лаборатории редакции или читателями.
Изменение программы для микроконтроллера
1) Открываем файл C:\OpenRoboFW\main.c, находим там область кода, обозначенную как настройка портов, надо установить все свободные порты на вывод командами DDR, меняем содержимое области на следующий код. Код для main.c:
2) Открываем файл C:\OpenRoboFW\main.c, находим область кода, обозначенную как программа реакции на USB пакет, сделаем, чтобы по команде зажигались светодиоды на всех свободных линиях. Меняем содержимое области на. Код для main.c
К тому же неплохо бы научится вставлять свои функции, которые будут выполняться по вашим командам, пока есть только on, off, status, нужно добавить еще команд, например добавим команду discoteka, по которой будет вызываться какая-нибудь наша функция в микроконтроллере, например - светодиоды горят через один на порте B. Добавим в микроконтроллере обработку дополнительных кодов, пусть это будет код 2, т.к. 1 и 0 уже используются для функций on и off, из программы для компьютера будем посылать потом микроконтроллеру код 2 функцией, вызываемой по команде discoteka. Опять меняем файл C:\OpenRoboFW\main.c, область реакции. Код для main.c
Изменение программы для компьютера
1) Открываем файл C:\OpenRobo\set-led.c
3) Редактируем файл set-led.c вставляем сверху от строчки
Обратите внимание на функцию usb_control_msg, в ней можно передать 2 изменяемых параметра (в первом у нас передаётся 2 или переменная isOn, которая равна 1 или 0), следующее число (там стоит 0) может передать еще 1 значение, например, 1 переменная может быть всё также быть изначальной командой на on или off, а второй переменной можно передать, например, номер порта, который следует включить. Получить доступ к этим параметрам в программе для микроконтроллера можно по именам p1 и p2, для этого примера p1=2, p2=0.
Особенности
- Многим понравится управление возможностями модуля с помощью мышки в окне программы Boxer24R, которая специально написана для этого модуля.
- Но вы не ограничены только приложенной программой Boxer24R. Вы можете с легкостью использовать и другие возможности управления с помощью набора текстовых команд из: - любой терминальной программы – одну из них KeTerm, можно скачать с нашего сайта;
- Теперь вы можете управлять нестандартной компьютерной периферией из ваших собственных программ и приложений. Скачайте пожалуйста полное техническое описание модуля и системы команд. Все команды описаны с примерами применения…И вперед! Осваивать возможности модуля
↑ Программа для ПК

В верхнем разделе меню я добавил небольшую справку о том, как должно быть сконфигурировано подключенное к ПК устройство.

В общем, программа получилась такой как я хотел, хотя осталась еще пара идей, которые хотелось бы реализовать позднее.
Для работы программы COM-порт необходимо настроить следующим образом:
Baund Rate - 9600
Data bits - 8
Stop Bits - 1
USB управление для своего устройства
Берем кабель USB и с одной стороны срезаем провода, видим 4 провода, которые нам нужны - красный, чёрный, жёлтый (бывает зеленым) и белый. Красный провод - это плюс питания +5V, чёрный провод - это минус питания. Этими проводами запитываем наше устройство. А другие 2 провода - жёлтый D+ и белый D- используются для обмена данными по USB.
↑ Анализ
Для решения задачи я решил применить микроконтроллер, который должен иметь на борту приемопередатчик UART и минимум три свободных порта для трёх каналов управления (количество их может быть увеличено и зависит от числа нагрузок). Вполне подходящим оказался микроконтроллер семейства AVR - ATMega8, как самый распространенный и недорогой.
Для создания связи устройства через USB-порт с ПК я использовал аппаратный преобразователь USB-UART с использованием микросхемы FT232RL.
Схема USB устройства на микроконтроллере AVR
Красным и чёрным проводом запитываем микроконтроллер - эти линии просто подключаются к VCC и GND. Линии с данными USB - это D+ и D- подключаются к линиям микроконтроллера, не к случайным, а к тем что заданы в программе для микроконтроллера, которую позднее будем делать, сразу скажу что это будут линии PD2 и PD4. Просто так нельзя подключать их, надо на пути поставить резистор на 68 Ом по требованию стандарта USB и еще снизить напряжение на данных линиях с 5V до 3.6V. Для резисторов посчитаем их мощность - ток USB задается в программе для микроконтроллера и мы его зададим на уровне 0.05 A, значит мощность резисторов 0.05 A * 5 V = 0.25 Вт. Такие и берем. Напряжение снижается параллельным подключением дидов Зенера 3V6 как показано на рисунке, эти диоды надо воткнуть правильной стороной, напомню что чёрная полоска на диоде с одной стороны должна быть направлена в сторону линий D+ и D-, а обратная сторона к минусу питания. И последнее, чтобы работало устройство USB, надо резистором в 1.5 кОм указать режим его работы, подключаем его к D-, это означает низкоскоростной режим, который нам нужен, поскольку мы не планируем передавать большие объемы данных, а только будем посылать простые сигналы, низкоскоростной режим нам нужен. Чтобы увидить что наше устройство работает, подключим светодиод к линии PB0, длинной плюсовой стороной к линии, а другой стороной к минусу питания.
Также воспользуемся вспомогательными инструментами для удобства - это зажим на 20 гнезд, чтобы легко извлекать микроконтроллер для перепрограммирования. И это 2 клеммника, чтобы прикрутить провода USB к макетной плате. Вообщем для сборки устройства нам потребуется сделать такой закуп:







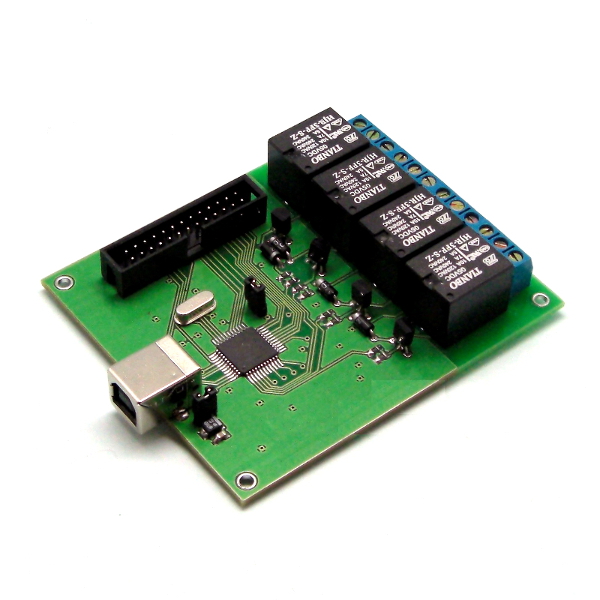
Собранное готовое к работе USB устройство выглядит так:
↑ А как же это все должно работать?
Подойдя к стадии написания программного обеспечения для МК я задался вопросом, а как же это все будет работать. Немного подумав, я решил, что алгоритм работы должен выглядеть следующим образом:

После включения микроконтроллера (его подключения к ПК), инициализируется его работа, устанавливается режим работы приемо-передатчика UART, после чего разрешаются прерывания и МК ждет приема данных от программы, запущенной на ПК.
Принцип работы
По командам компьютера устройство изменяет состояние своих выходных линий. Компьютер имеет возможность считывать состояние линий ввода/вывода и отображать их в окне прилагаемой программы. Кроме этого модуль может управляться набором собственных текстовых команд, которые вы можете использовать в своих собственных программах.
↑ Заключение
В заключении хочется сказать, что работа над проектом продолжается.
В планах:
• реализация FIFO,
• наращивание числа коммутаторов,
• доработка управляющего ПО
Спасибо за внимание!
↑ Прошивка для МК
Программа, отвечающая за работу МК написана с использованием WinAVR и отлаживалась виртуально на ПК при помощи пакета ISIS 7 Professional. Увидеть исходный код и получить готовую прошивку можно скачав архив внизу статьи.
Если кому-то будет интересен результат компиляции кода, то он представлен ниже:
Program: 1666 bytes (20.3% Full)
(.text + .data + .bootloader)
dаta: 581 bytes (56.7% Full)
(.data + .bss + .noinit)
Compiling C: ra1.c
avr-gcc -c -mmcu=atmega8 -I. -gstabs -DF_CPU=7372800UL -Os -funsigned-char -funsigned-bitfields -fpack-struct -fshort-enums -Wall -Wstrict-prototypes -Wa,-adhlns=./ra1.lst -std=gnu99 -MMD -MP -MF .dep/ra1.o.d ra1.c -o ra1.o
Linking: ra1.elf
avr-gcc -mmcu=atmega8 -I. -gstabs -DF_CPU=7372800UL -Os -funsigned-char -funsigned-bitfields -fpack-struct -fshort-enums -Wall -Wstrict-prototypes -Wa,-adhlns=ra1.o -std=gnu99 -MMD -MP -MF .dep/ra1.elf.d ra1.o --output ra1.elf -Wl,-Map=ra1.map,--cref -lm
Creating load file for Flash: ra1.hex
avr-objcopy -O ihex -R .eeprom -R .fuse -R .lock ra1.elf ra1.hex
Creating load file for EEPROM: ra1.eep
avr-objcopy -j .eeprom --set-section-flags=.eeprom="alloc,load" \
--change-section-lma .eeprom=0 --no-change-warnings -O ihex ra1.elf ra1.eep || exit 0
Creating Extended Listing: ra1.lss
avr-objdump -h -S -z ra1.elf > ra1.lss
Creating Symbol Table: ra1.sym
avr-nm -n ra1.elf > ra1.sym
Converting to AVR Extended COFF: ra1.cof
avr-objcopy --debugging --change-section-address .data-0x800000 --change-section-address .bss-0x800000 --change-section-address .noinit-0x800000 --change-section-address .eeprom-0x810000 -O coff-ext-avr ra1.elf ra1.cof
Discarding local symbol outside any compilation unit: .do_copy_data_start
Discarding local symbol outside any compilation unit: .do_copy_data_loop
Discarding local symbol outside any compilation unit: .do_clear_bss_start
Discarding local symbol outside any compilation unit: .do_clear_bss_loop
avr-objcopy: --change-section-vma .eeprom+0xff7f0000 never used
avr-objcopy: --change-section-lma .eeprom+0xff7f0000 never used
avr-objcopy: --change-section-vma .noinit+0xff800000 never used
avr-objcopy: --change-section-lma .noinit+0xff800000 never used
Size after:
AVR Memory Usage
----------------
Device: atmega8
Program: 1666 bytes (20.3% Full)
(.text + .data + .bootloader)
dаta: 581 bytes (56.7% Full)
(.data + .bss + .noinit)
> Process Exit Code: 0
> Time Taken: 00:04
Как сделать программу для Windows
1) Заходим на сайт, выбираем русский язык, нажимаем INSTALL NOW.
2) После установки запускаем, нажимаем Создать проект. Для начала создадим простую программу с 1 кнопкой - нажимаем эту кнопку, текст в ней меняется.
3) Выбираем шаблон Приложение Windows Forms, внизу вводим название программы, нажимаем OK.
4) Перетаскиваем справа элемент Button на центральное окно с формой и оставляем его внутри формы.
5) Кликаем на форму и на кнопку, при этом справа внизу есть окно Свойства, его содержимое меняется. В этом окне задаём необходимые свойства элементов - текст кнопки и окна. Редактируем свойство Text, пишем там любой текст, например, Моя кнопка. Текст на кнопке меняется, это видно на форме в центральном окне.
6) Теперь сделаем так, чтобы при нажатии на эту кнопку, ее свойство, которое определяет текст на ней менялось на другое. Так же можно менять любые другие свойства.
7) Делаем двойной клик на кнопке Моя кнопка, которая находится в форме в центральном окне, попадаем в файл кода Form.h (его можно выбрать в любое время слева в меню). В этом файле после двойного клика была создана функций button1_Click (остальной код автоматом был создан по шаблону при создании проекта), курсор находится внутри нее, нажмите Enter, чтобы создать пустую строку, куда и будем писать код.
8) Как можно видеть в этом же файле чуть повыше есть разделы - button1 и form1, там заданы начальные установки для элементов - кнопки и формы. Воспользуемся ими, скопируем внутрь нашей функции клика по кнопке (это место отмечено красной стрелкой) строчку, где устанавливается название кнопки, а именно this->button1->Text = L"Моя кнопка"; Только текст Моя кнопка изменим на Работает!
9) Нажимаем на кнопку с зеленым треугольником, через некоторое время наша программа запустится (если вы не совершили ошибок) и при нажатии на кнопку, текст внутри меняется с Моя кнопка на Работает!
10) Забрать готовую программу (файл .exe) можно в директории текущего пользователя
Весь процесс показан на картинках.
В статье сделана попытка предоставить пошаговую инструкцию — как соединить самодельное устройство USB HID на микроконтроллере AVR и компьютер с операционной системой Windows 7 x64, чтобы обмениваться данными и управлять портами микроконтроллера. Пример приложения управляет через USB ножкой порта микроконтроллера (к ней подключен индикационный светодиод). Есть возможность также прочитать состояние состояние светодиода — потушен он или горит. Топик предназначен для новичков, поэтому большая просьба к знатокам программирования — приберегите тухлые яйца и гнилые помидоры иронические комментарии для более удобного случая.
Используемое программное обеспечение
Используемое железо
Благодаря библиотеке V-USB для создания устройства USB HID подойдет любой микроконтроллер AVR. Если Вы дружите с паяльником, то даже можете собрать подключение к USB самостоятельно по одной из опубликованных схем. Такая схема (взята из пакета V-USB [1]) в качестве примера приведена на картинке.

Чтобы экономить время и усилия, лучше использовать готовую макетную плату. Особенно удобно, если в плату будет записан USB-загрузчик (bootloader), тогда не понадобится покупать программатор для перепрошивки платы. Я использовал макетную плату AVR-USB-MEGA16 с микроконтроллером ATmega32A, в ней загрузчик есть (USBasploader, эмулирующий поведение программатора USBasp). Вот так платка выглядит в натуральную величину:

Создание firmware микроконтроллера с помощью Atmel Studio 6 и библиотеки V-USB
Сделайте новый проект в Atmel Studio 6 (далее просто AS6). Когда AS6 предложит выбрать микроконтроллер, выберите Atmega32 без буквы A, не Atmega32A (хотя на плате стоит Atmega32A) — это важно, так как тулчейн WinAVR не видит разницы, он знает только Atmega32. Эти микроконтроллеры по внутреннему устройству идентичны, так что для нас разницы нет, а для AS6 есть.
Теперь нужно правильно настроить компилятор. В верхнем меню AS6 нажите Tools, далее Options.. и появится вот такое окно:
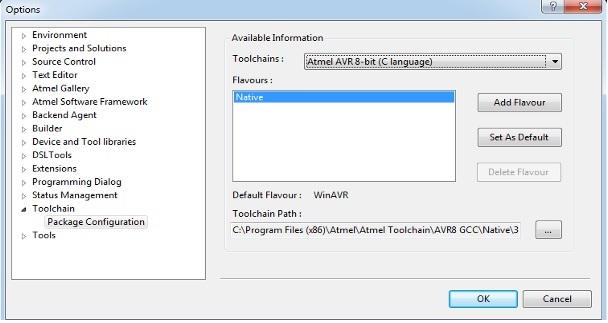
Слева в списке выберите Toolchain. Справа появится список Flavours. Этим словечком Atmel закодировала возможные варианты используемого инструментария (тулчейны).
Для добавления в список Flavours тулчейна WinAVR нажмите кнопку Add Flavour, появится следующее окно:
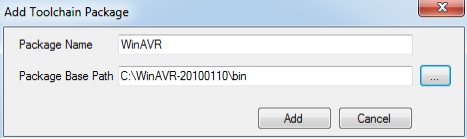
В верхней строчке этого окна введите имя компилятора WinAVR (произвольное), а в нижней строке введите полный путь, куда установлен сам компилятор тулчейна (с указанием папки \bin) и нажмите кнопку Add. В списке Flavours появится добавленный компилятор, как показано на скриншоте.

Выделите мышкой наш новый добавленный компилятор WinAVR и нажмите кнопку Set As Default (сделать его тулченом по умолчанию), и нажмите OK. После этой процедуры наша AS6 будет использовать компилятор WinAVR.
Пора настроить свойства нашего проекта, для этого курсором в Solution Explorer левым щелчком выберите имя проекта и нажмите Alt+F7 (меню Project -> Properties), появится окно с настройками:
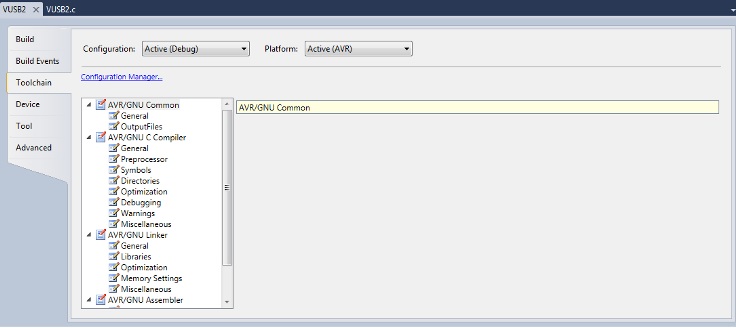
- В разделе AVR/GNU C Compiler -> Symbols добавляем в поле -D строчку F_CPU=12000000UL — это соответствует частоте микроконтроллера 12 МГц (такой кварц установлен на моей макетной плате AVR-USB-MEGA16).
- В разделе AVR/GNU Assemler -> General в поле Assembler flag надо добавить -DF_CPU=12000000UL.
- В разделе AVR/GNU C Compiler -> Optimization в поле Optimization Level должно стоять Optimize for size (-Os).
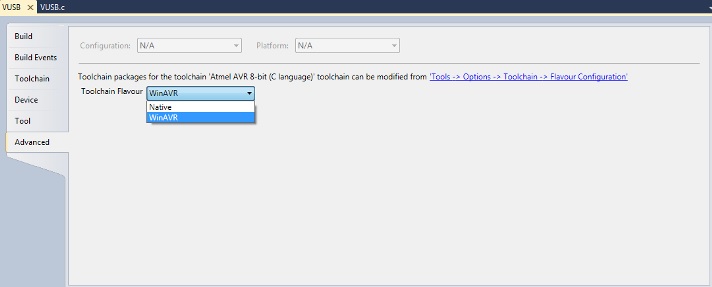
В выпадающем списке Toolchain Flavour выберите добавленный компилятор WinAVR, чтобы при компилировании проекта AS6 использовала его. На этом настрока AS6 закончена.
Далее необходимо в созданный проект добавить файлы исходного кода проекта [6] — см. папку firmware\VUSB, файлы VUSB.c, usbdrv.c, usbdrvasm.S и oddebug.c. Проект ASS6 создан на основе одного из примеров библиотеки V-USB: hid-custom-rq, который изначально компилировался с помощью утилиты make из командной строки. На основе библиотеки V-USB можно найти много других примеров кода — в основном это устройства USB HID (мыши, клавиатуры, устройства ввода и вывода), но есть также и устройства USB CDC (виртуальный COM-порт). Если Вам лень самому создавать проект, просто откройте в AS6 файл проекта VUSB.atsln, в нем уже сделаны все необходимые настройки и добавлены все нужные файлы.
Если у Вас используется другая макетная плата, то нужно правильно настроить файл usbconfig.h. Это конфигурационный файл библиотеки V-USB, в нем задаются многие настройки и параметры (VID, PID, ножки микроконтроллера, значения для дескрипторов и другие настройки). Подробное описание всех настроек дано в комментриях этого файла. Основное внимание следует уделить назначению выводов микроконтроллера, которые используются под сигналы USD D+ и D- (макроопределения USB_CFG_IOPORTNAME, USB_CFG_DMINUS_BIT, USB_CFG_DPLUS_BIT), к этим ножкам предъявляются особые требования. Конфигурационный файл usbconfig.h из архива [6] предназначен под разводку ножек макетной платы AVR-USB-MEGA16, и он гарантированно работает. Моргать программа будет светодиодом, который уже имеется на макетной плате и подключен к ножке 0 порта B.
Создание программы для компьютера (ПО хоста)
Наша программа должна посылать через подключение USB пакеты, которые будут управлять микроконтроллером.
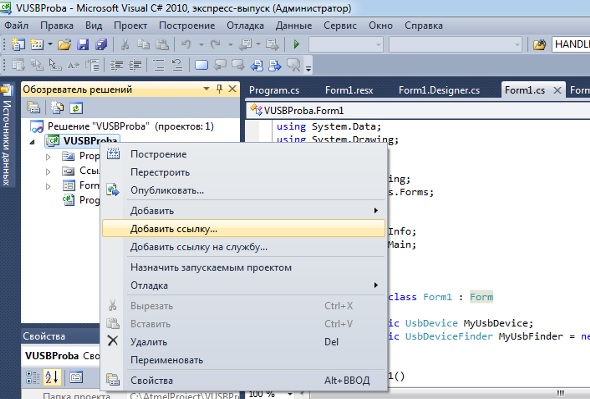
появится ещё одно окно
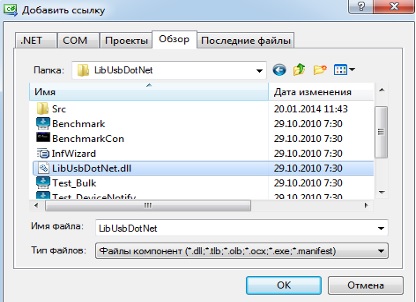
здесь нужно найти путь на диске, где находится библиотека LinUsbDotNet.dll (по умолчанию она устанавливается папку C:\Program Files\LibUsbDotNet, но лучше сделать копию файла DLL в рабочий каталог проекта. После подключения библиотеки её нужно объявить в проекте, для этого добавьте в главный модуль программы (файл Form1.cs) строки:
Перейдите к визуальному редактору формы, и приведите её приблизительно к такому виду (добавьте 3 кнопки Button и 3 текстовых метки Label):

Сделайте обработчик события загрузки формы. Он нужен для того, чтобы при старте программы происходила инициализации экземпляра класса LibUsbDotNet, через который осуществляется обмен с устройством USB. Перед началом обмена необходимо открыть доступ именно к нашему устройству, потому что к компьютеру может быть подключено несклько устройств USB HID, и необходимо уметь обращаться к каждому по отдельности. Для целей идентификации USB-устройств служат специальные идентификаторы, которые имеют абсолютно все устройства USB, это VID и PID.
VID это идентификатор производителя (Vendor ID), а PID — идентификатор устройства (Product ID). Наше USB-устройство имеет VID: 0x16C0, PID: 0x05DF, эти значение указаны в конфигурационном файле usbconfig.h (об этом файле мы уже упоминали) проекта микроконтроллера AS6. Чтобы ПО хоста обратилась к именно к нашему USB-устройству, нужно инициализировать объект MyUsbFinder такими же параметрами VID: 0x16c0, PID: 0x05df, как указаны в файле usbconfig.h. Для этого в область определения глобальных переменных класса Form1 добавьте следующий код:
После того как мы определились с каким USB-устройством будем работать, можно к нему подключаться, и это удобно сделать в момент старта программы (открытия окна формы). Для этого выберите основную форму программы, и в редакторе свойств создайте обработчик события загрузки Form1_Load. В теле обработчика введите следующий код:
Сделайте обработчик события клика на кнопке button1 («Вкл»), для этого сделайте в визуальном редакторе на кнопке двойной щелчок, и добавьте в тело обработчика события код:
Для обработчика кнопки «Выкл» добавьте код:
Код для обработки кнопки «Чтение»:
Обработчик события закрытия формы (завершение работы программы) гасит светодиод, если он горит:
Как пакеты USB декодируются в firmware микроконтроллера
Прием и обработка данных на стороне микроконтроллера осуществляется в функции usbFunctionSetup (находится в главном модуле VUSB.c проекта firmware AS6). Вот эта функция:
Наше устройство USB HID простейшее, и реагирует оно только на управляющие передачи (control transfer), которые проходят через конечную точку 0 (default control endpoint). По типу запроса (поле bRequest) декодируется направление передачи данных. Если CUSTOM_RQ_SET_STATUS, то это данные, предназначаемые для микроконтроллера. Данные декодируются и микроконтроллер выполняет заложенную там команду. В этом случае в самом первом по порядку принятом байте данных закодировано состояние светодиода — если там в младшем бите единичка, то светодиод включается, а если нолик, то гаснет. Если же в поле bRequest принято значение CUSTOM_RQ_GET_STATUS, то в ответ заполняется буфер текущим состоянием светодиода, и данные буфера отправляются обратно хосту. Все очень просто, и при желании поведение кода можно легко переделать под свои нужды.
Видео, как это работает:
Буду рад ответить в комментариях на вопросы и конструктивные замечания.
Ссылки
В дальнейшем по возможности планирую сделать тоже самое, но на микроконтроллере с аппаратным интерфейсом USB.


В наше время все больше находят применение устройства, позволяющие управлять нагрузками с помощью ПК. Обычно это некий коммутатор силовых нагрузок, подключаемый к компьютеру и специальное программное обеспечение.
Встречаются готовые образцы, которые позволяют управлять нагрузками удаленно через интернет, например, давая возможность включать свет, ТЭНы в бане, различные клапаны и т.д. Современные технологии позволяют делать устройства миниатюрными и быстродействующими.
Описанное в статье устройство создавалось в рамках учебного курса университета в виде курсового проекта, поэтому начну с самого начала.
Меняем настройки программатором


При этом установите такие биты конфигурации:
Для ATtiny2313A (наш случай):
CKSEL0..3=1111 SUT0..1=10 CKOUT=1 CKDIV=1 RSTDISBL=1 BODLEVEL2..0=101 WDTON=1 SPIEN=0 EESAVE=1 DWEN=1
Установите В справочнике эти fuse-биты и прошейте их в микроконтроллер полученной строкой через программу AVR dude, о том Как прошить тут. Также дам на всякий случай fuse-биты для других микроконтроллеров.
Для ATmega8A:
CKSEL0..3=1111 SUT0..1=10 BODEN=0 BODLEVEL=1 BOOTRST=1 BOOTSZ0..1=00 EESAVE=1 CKOPT=0 SPIEN=0 WDTON=1 RSTDISBL=1
Для ATmega16A:
CKSEL3..0=1111 SUT0..1=10 BODEN=0 BODLEVL=1 BOOTRST=1 BOOTSZ0..1=00 EESAVE=1 CKOPT=0 SPIEN=0 JTAGEN=1 OCDEN=1 LB1..2=00 BLB=0000
Теперь когда программа написана и записана в микроконтроллер, можно проверить правильность сборки устройства. Напишите программу на компьютер для USB связи, читайте далее как это сделать и при этом в процессе будет установлен фильтр для возможности опознания устройства. Подключите устройство к USB порту компьютера, установите фильтр как далее будет описано, если все правильно было собрано и установлено, то оно будет обнаружено и опознано как LEDCtlHID. Если этого не произошло, то ищите проблему и ошибки при сборке устройства или при установке программ, еще раз внимательно все сверьте и проверьте, что ничего не пропущено и что все контакты соединены или запаяны как надо. Бывает проблема тут, если пайка была совершена с неконтактами, с не правильными контактами или не всеми контактами, а также что элементы схемы были повреждены высокой температурой паяльника, и устройство поэтому не работает. Важно собирать устройство именно на макетной плате первый раз.
↑ Сборка

Проект был собран на монтажной плате, ПП не разрабатывалась. Прилагаю к статье файл модели в Proteus 7.6 SP4.
↑ Схема структурная

Тут все очень просто и почти не требует пояснения. Вся электрическая часть устройства состоит из следующих элементов:
a) Блок управления включения/выключения нагрузки
b) Микроконтроллер
c) Преобразователь USB – UART
d) ПК и программа управления устройством
↑ Файлы
Исходники и прошивка МК:
🎁AVR.zip 70.42 Kb ⇣ 72
Программа управления по USBдля Win:
🎁USB-Controll.zip 26.83 Kb ⇣ 69
Устройство компьютерного управления различными приборами, схема которого показана на рис. 1, функционально подобно описанному в [1], но подключается к USB-порту компьютера, который (в отличие от СОМ-порта) сегодня есть в каждом из них. Единственная микросхема устройства — распространенный микроконтроллер ATmega8. Он необходим для организации связи по шине USB. Хотя в нем и отсутствует специализированный аппаратный модуль, эта функция выполняется программно.
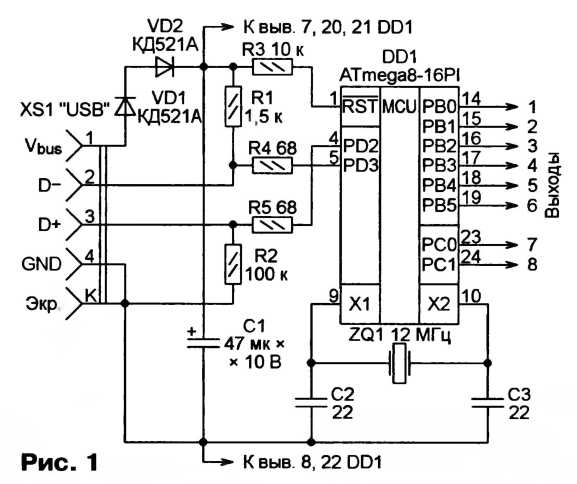
Резистор R1, подключенный между положительным выводом источника питания и линией D-шины USB, переводит ее в низкоскоростной режим LS со скоростью обмена 1,5 Мбит/с, что и позволяет расшифровывать посылки компьютера программным способом. Резисторы R4 и R5 устраняют переходные процессы, возникающие при обмене информацией, что увеличивает стабильность работы. Конденсатор С1 блокирует импульсные помехи в цепи питания, что также улучшает стабильность работы устройства Диоды VD1 и VD2 служат для понижения напряжения питания микроконтроллера приблизительно до 3,6 В — это требуется для согласования уровней с шиной USB.
Сигналы управления приборами формируются на выходах РВО—РВ5 и РСО, РС1 микроконтроллера. Высокий логический уровень — напряжение около 3,4 В. Напряжение низкого уровня близко к нулю. К выходам можно подключать приборы, потребляющие ток не более 10 мА (от каждого выхода). Если требуются большие значения тока или напряжения, то следует использовать узлы согласования, показанные в [1] на рис. 5 и 6.
Устройство собрано на макетной плате, печатная не разрабатывалась. Применены резисторы МЯТ, конденсаторы С2 и СЗ — керамические высокочастотные, С1 — К50-35 или аналогичный импортный. Диоды кремниевые с падением напряжения на переходе около 0,7 В.
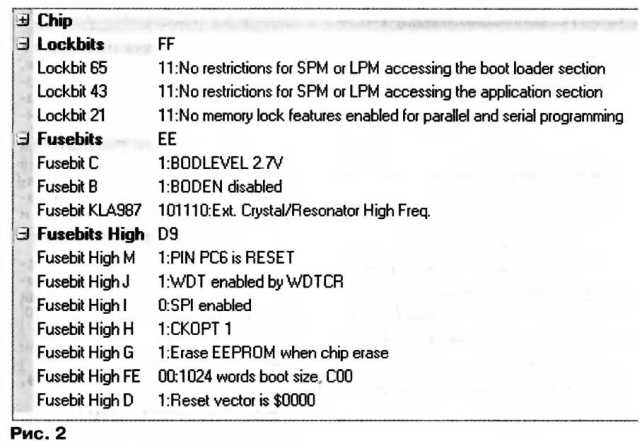
Программа для микроконтроллера разработана в среде Bascom-AVR версии 1.12.0.0. Для работы с шиной USB использована библиотека swusb.LBX, которая выполняет программное декодирование сигналов USB в режиме реального времени. Полученный в результате компиляции код программы из файла с расширением HEX следует загрузить во FLASH-память микроконтроллера. Для этого был использован программатор [2] совместно со встроенной в Bascom-AVR утилитой. Состояние разрядов конфигурации микроконтроллера должно соответствовать показанному на рис. 2.
При первом подключении устройства к компьютеру операционная система обнаружит новое USB НЮ совместимое устройство с именем "uniUSB" и установит необходимые драйверы. Через несколько секунд устройство настроено и готово к использованию. Для работы с ним была создана программа UniUSB. Она представлена в двух вариантах: для 32-разрядных (х86) и 64-разрядных (х64) операционных систем семейства Windows. Работа 32-разрядной версии проверена в операционных системах Windows 98, Windows ХР, Windows 7, а 64-разрядной — только в Windows ХР х64.
Программа UniUSB написана на языке PureBasic (версия 4.31) с использованием библиотеки пользовательских функций HID_Lib, поддерживающей работу с USB НЮ устройствами. Внешний вид окна программы показан на рис. 3.
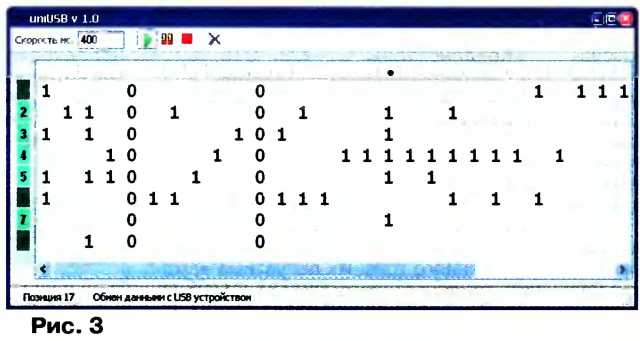
В одной папке с ее исполняемым файлом должен находиться файл, называющийся UniUSB_KOfl.txt или UniCOM_KOfl.txt. Последний вариант необходим для совместимости с программой UniCOM, предложенной в [1]. В этом файле хранится сценарий управления внешними приборами. При запуске программы данные из файла загружаются в таблицу, расположенную в главном окне, а при завершении работы сохраняются в файле. Щелчок левой кнопкой мыши по ячейкам таблицы позволяет изменять их состояние: 1 — высокий логический уровень, 0 или пусто — низкий логический уровень.
Для добавления или удаления столбца таблицы нужно по ней щелкнуть правой кнопкой мыши и в появившемся меню выбрать требуемое действие.
При подключении устройства к USB-порту программа обнаружит его и активирует кнопку , расположенную в верхней части окна на панели инструментов. Нажатием на эту кнопку запускают процесс перебора столбцов таблицы и установки указанных в них состояний выходов. Для большей наглядности слева от таблицы подсвечиваются номера выходов, на которых в данный момент установлен высокий логический уровень. Скорость перебора (время в миллисекундах между переходами от столбца к столбцу) задают в поле "Скорость, мс".
Учтите, операционная система Windows — многозадачная! Это означает, что процессорное время делится между множеством иногда скрытых от пользователя процессов, которые выполняются по очереди с учетом установленных в системе приоритетов. Поэтому не стоит ожидать большой точности выдерживания интервалов времени менее 100 мс.
ЛИТЕРАТУРА
1. Носов Т. Управление приборами через СОМ-порт компьютера. — Радио, 2007, № 11,0.61,62.
2. Рыжков А. US-программатор микроконтроллеров AVR и AT89S, совместимый с AVR910. — Радио, 2008, № 7, с. 28, 29

MP714 Jerome-2 представляет собой модуль контроля и управления нагрузкой через USB порт. Модуль предназначен для сопряжения ноутбука или персонального компьютера с различными исполнительными устройствами и датчиками через порт USB, и позволяет непосредственно включать и выключать четыре мощные нагрузки с помощью встроенных электромагнитных реле. Он также способен считывать и передавать в управляющую программу логическое состояние датчиков, подключенных к входным линиям, и по команде компьютера устанавливать на выходных линиях разъёма расширения логические «0» или «1». Благодаря четырем аналого-цифровым входам может измерять величину напряжения (АЦП).
Для запуска, модуль достаточно подключить к порту USB компьютера и выбрать COM порт выделенной ОС в настройках клиента.
Модуль выполнен на печатной плате размером 98х77 мм, где установлено 4 реле с током коммутации до 7А, 1.5 кВт. Для подключения силовых линий к реле на плате имеются клеммы под отвертку.
Стоимость и варианты доставки будут рассчитаны в корзине
MP714 Jerome-2 представляет собой модуль контроля и управления нагрузкой через USB порт. Модуль предназначен для сопряжения ноутбука или персонального компьютера с различными исполнительными устройствами и датчиками через порт USB, и позволяет непосредственно включать и выключать четыре мощные нагрузки с помощью встроенных электромагнитных реле. Он также способен считывать и передавать в управляющую программу логическое состояние датчиков, подключенных к входным линиям, и по команде компьютера устанавливать на выходных линиях разъёма расширения логические «0» или «1». Благодаря четырем аналого-цифровым входам может измерять величину напряжения (АЦП).
Для запуска, модуль достаточно подключить к порту USB компьютера и выбрать COM порт выделенной ОС в настройках клиента.
Модуль выполнен на печатной плате размером 98х77 мм, где установлено 4 реле с током коммутации до 7А, 1.5 кВт. Для подключения силовых линий к реле на плате имеются клеммы под отвертку.
Настраиваем системную переменную Path для MinGW
Программа на микроконтроллер AVR для USB связи
1) Скачиваем исходные коды OpenRoboFW и распакуйте архив на диск C:\, я собрал этот архив из файлов проекта V-USB, настроил их на Attiny2313A и тактовую частоту 12 МГц (эти настройки меняются в файле Makefile, если используется другой микроконтроллер), упростил код для внесения изменений. V-USB дает нам исходники программ с идентификаторами VID и PID, которые нужны для распознания USB устройства компьютером. На всякий случай вот ссылка на проект . После распаковки архива содержимое директории выглядит так:
 | Назначение важных файлов: main.c - главный файл программы на языке C, она осуществляет обработку информации, пришедшей по USB, и в ней программируется реакция микроконтроллера на USB пакеты с компьютера Makefile - параметры сборки, тип микроконтроллера (взяли - attiny2313a), частота, информация по фьюзам для других микроконтроллеров, при использовании другого микроконтроллера, в этом файле его нужно прописать в строке DEVICE (например - atmega16a) usbconfig.h - параметры USB, порт подкючения линии D-, ток |
Откройте main.c и обратите внимание на 2 области кода, которые там выделены - программа реакции на USB пакет и настройка портов. В этих областях надо вставлять свой код, остальное можно не трогать. Для примера там уже стоит код, его можно менять. В приходящем пакете USB с компьютера есть 2 параметра - p1 и p2, которые передаются из программы в виде параметров, в зависимости от их значений можно менять состояние линий микроконтроллера (портов) в программе реакции.
2) Скачиваем программу WinAVR и устанавливаем, она нужна для создания HEX-прошивки микроконтроллера AVR, сайт WinAVR
3) Запускаем командную строку Windows, которая находится тут c:\Windows\System32\cmd.exe появляется чёрное окно. В этом окне вводим 2 команды (набираем команду, нажимаем enter):
USB устройство своими руками
Подготовка программы ПК
Читайте также: