
Схема подключения контроллера электросамоката digma
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
Некоторые самоделки Вы можете посмотреть в этом видео.
Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6, CS32F103RCT6 (символы после не имеют значения). Работа прошивки с другими чипами не поддерживается.
Обучение контроллера
Для того, чтобы контроллер понимал, в какую сторону вращать мотор, определить угол датчиков холла, необходимо произвести обучение. Обучение нужно провести только при первом включении системы, в дальнейшем вся нужная информация будет храниться в энергонезависимой памяти контроллера. В процессе обучения также контроллер понимает на какое напряжение установлена батарея – 36 или 48 В. Эту информацию он использует, чтобы отключить питание системы, когда она окажется разряжена. Функция защиты от переразряда присутствует и в BMS литиевой батареи, так что защита получается двойная и что-то из них сделает это первым.
- Нужно вывесить колесо, чтобы оно могло свободно вращаться
- Соединить два провода обучения
- Подключить батарею
- Включить “зажигание” (красный тонкий провод на + батареи)
- Если колесо вращается в верном направлении – выключаем “зажигание” и разъединяем провода обучения. Обучение закончено
- Если колесо вращается не в ту сторону, размыкаем провода обучения и соединяем снова, направление вращения изменится, выключаем “зажигание” и разъединяем провода обучения. Обучение закончено
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. В процессе установки необходимо соглашаться на все разрешения для программы.
После запуска необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений (это может занять немало времени и она подгузит еще несколько нужных дополнений сама) программа готова к работе.
В некоторых случаях потребуется дополнительно установить Python. На свой компьютер я его не устанавливал, так как всё работает и без него. У некоторых пользователей без него работать не получается.
Также при неполадках с программой иногда помогает её запуск через “Исправление неполадок совместимости” (жмем на иконку программы правой кнопкой мыши, из меню выбираем эту функцию) экспериментируем с различными вариантами.
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры. Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех следует повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше сделать это как можно ближе к плате.
Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.
Самокат с мотор-колесом
Мотор-колесо является современным решением, когда двигатель установлен непосредственно в одном из колёс. Преимущества перед цепным устройством самоката очевидны:
- Отсутствие проблем с цепью — уязвимым звеном конструкции
- Простота в обслуживании
Обычно электросамокат типа "мотор-колесо" имеет меньший вес и актуальный внешний вид, его проще хранить и транспортировать. Недостаток такой конструкции в том, что мотор не может быть мощнее 500 Вт. Такой силы двигателя достаточно для передвижения по ровным дорогам городской среды, а вот для загородных поездок он не предназначен.
Существует 2 типа мотор-колёс:
- Безредукторные имеют надёжно зафиксированные обмотки на оси, магнитное поле которых заставляет двигаться ступицу с постоянными магнитами. Надёжная и неприхотливая в эксплуатации конструкция такого типа даёт самый большой из возможных КПД и мощность. Её недостаток: громоздкость и немалый вес самоката.
- С планетарным редуктором — более лёгкая и компактная альтернатива. Самокат с таким приводом не сталкивается с сопротивлением вращению из-за самоиндукции на скоростях выше 15 км/ч. Правда, надёжность недорогих моделей с таким устройством порой оставляет желать лучшего, если при сборке использовались пластиковые шестерни.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом. Необходимо выбрать именно конечную папку с этим названием, иначе прошивка может не компилироваться (не собираться).
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже. Чип будет брать питание от родной гироскутерной батареи, поэтому вывод +3,3 V подключать не нужно. Убедитесь что батарея достаточно заряжена и питание не пропадет в момент прошивки.
При прошивке должны быть подключены:
- батарея гироскутера
- кнопка включения гироскутера
- программатор
Возможные способы управления кроме ручки газа
Внимание. Схемы предполагают,что на левый красный провод подведено +3,3 В, установлены подтягивающие резисторы и помехоподавляющие конденсаторы на входы сигнала тормоза и газа. По умолчанию (в заводском исполнении) на красный провод подведено +15 В . Не забывайте об этом при самостоятельной переделке! Напряжение более 3,3В выведет из строя сигнальный вход.
Что интересного внутри контроллера
Если вскрыть контроллер можно увидеть не совсем опрятную плату, по крайней мере у меня произошло так. Плату проверить всё же желательно, я обнаружил неотмытые капельки припоя, которых по хорошему там быть не должно. Также стоит обратить внимание на наличие термопасты на радиаторе с мосфетами. Электролитические конденсаторы по питанию установлены на 63 В. Мосфеты P65NF06 с предельно допустимым напряжением сток-исток (Uds): 60 В. То есть контроллер можно запитывать от батарей с немного более высоким напряжением, чем привычных, 48 В (54,6 мах). Это литий-ионная батарея 14S или литий-железо-фосфатная 16S. Напряжения этих полностью заряженных батарей 58,8 В и 58,4 В соответственно. Максимальная скорость в этом случае будет чуть больше.
Похожее
Промокоды и акции АлиЭкспресс
Охота на гаджеты. Срок действия:11.12.2021 11:00 - 16.12.2021 10:59 *****
скидка 1000 рублей при заказе от 4900 рублей Промокод:SUPERDEAL1000
*****
скидка 2000 рублей при заказе от 9900 рублей Промокод:SUPERDEAL2000
*****
скидка 3300 рублей при заказе от 19000 рублей Промокод:SUPERDEAL3300
*****
скидка 5000 рублей при заказе от 29000 рублей Промокод:SUPERDEAL5000
*****
скидка 6500 рублей при заказе от 39000 рублей Промокод:SUPERDEAL6500
*****
Срок действия:07.12.2021 00:00-31.12.2021 23:59
*****
250 рублей при заказе от 500 рублей для новых пользователей Промокод:BlackALI250newdec
Политика конфиденциальности и использования файлов сookie: Этот сайт использует файлы cookie. Продолжая пользоваться этим сайтом, вы соглашаетесь с их использованием.
Дополнительную информацию, в том числе об управлении файлами cookie, можно найти здесь: Политика использования файлов cookie
Электросамокат отличается от обычного самоката наличием дополнительных компонентов. Главные из них – встроенный в колесо бесколлекторный электродвигатель, аккумуляторная батарея и контроллер. Аккумуляторная батарея обеспечивает автономное питание мотора, а коллектор отвечает за его корректное управление и контроль работы. Среди представленных в продаже электронных компонентов есть масса готовых решений, позволяющих снабдить электроприводом как самокат, так и другие виды персонального транспорта.
Предшественники современных контроллеров напоминали массивный реостат. Теперь они компактны, не имеют движущихся элементов и регулируют передачу электроэнергии к двигателю в зависимости от длительности поступающих импульсов. Контроль и управление электросамокатом производится при помощи пульта, закрепленного на руле. Обычно на пульте есть рычаги или кнопки для включения питания и фар, выбора режимов и скорости езды.
На дисплее может отображаться текущая скорость, уровень заряда батареи, пробег и другая информация. При отсутствии дисплея минимальную информацию о работе устройства могут предоставлять светодиодные индикаторы. Многие современные электросамокаты интегрируются со смартфонами, которые берут на себя функции дисплея и пульта управления.
Заказать готовую прошитую плату с нужными настройками
Если Вам нужна уже готовая прошитая плата, но по какой либо причине не хотите заниматься прошивкой самостоятельно, Вы можете заказать её здесь.
Характеристики контроллера
- векторное/синусное управление мотор колесами
- поддерживается работа мотор колес только с датчиками Холла 120 градусов (это все гироскутерные колёса)
- один контроллер управляет двумя мотор колесами (возможна прошивка на один мотор)
- ручное управление с обычных ручек или педалей для электротранспорта на датчиках Холла или потенциометрах
- радиоуправление с аппаратуры работающей на PWM протоколе
- ток на каждый мотор (настраивается с шагом 1 А) до 25 А. При токе более 20 А обязательно используйте дополнительный радиатор для лучшего охлаждения!
- режимы управления: момент/скорость (подробнее о режимах ниже)
- реверс
- ограничение максимальных оборотов мотор колес (настраивается) для безопасности в детских проектах
- повышение максимальных оборотов мотор колес без поднятия напряжения батареи (настраивается)
- напряжение питания 24 – 60 В
- направление вращения каждого мотор колеса также может быть настроено под Ваш проект
Назначение проводов
- Три толстых провода на двигатель / желтый, синий, зеленый (три фазы мотора)
- Два толстых провода / красный “+”, черный “-” на батарею и тонкий красный – на “зажигание”, при его подключении на красный толстый провод включается контроллер
- Пять проводов на датчики холла / красный “+5В”, черный “-“, желтый, синий, зеленый – сигналы с датчиков
- Провод на датчик тормоза (при замыкании на “-” отключается двигатель)
- Выход сигнала скорости (дублирует сигнал одной из фаз, напряжение +5В)
- Три провода на ручку газа / красный “+5В”, черный “-“, зеленый “сигнал 0,8 … +4,2 В”
- Два провода на переключатель максимальной скорости (душилка) мощность при этом не меняется. Три уровня:
- 100% – ни один из проводов не подключен к “-“,
- 75% – синий провод подключен к “-“,
- 120% – черный провод подключен к “-“
- Два белых провода – “обучение”
Контроллер работает с ручками и курками газа на датчике Холла. Здесь собраны некоторые из них.
Конструкция электросамоката
Выбирая электросамокат, устройство двигателя и аккумулятора нужно понимать лишь в общих чертах. Ведь в случае поломки стоит поручить ремонт профессионалам.
В обычной комплектации электросамокат состоит из таких составных частей:
- Крепкая металлическая рама
- Электродвигатель
- Аккумуляторная батарея
- Дека с платформой для ног
- Руль с ручками и элементами управления: переключение скоростей, ручка тормоза, зажигание
- Два колеса с амортизацией на одном либо обоих для более комфортной езды
- Тормоза — обычно на заднем колесе
Устройство тормоза может быть барабанным, дисковым или клещевым. Самокаты тормозят благодаря приводу на руле с помощью рукоятки.
В отдельных моделях современных самокатов есть и другие опциональные части: бортовой компьютер с дисплеем, сиденье, багажник, измерительные устройства (спидометр, одометр), фары, поворотники, зеркала заднего вида.
На рынке электросамокатов представлены модели с двумя видами привода: цепная передача и мотор-колесо.
Схема работы электросамоката
Если вы хотите детально понять, как устроен электросамокат, схема поможет наглядно увидеть подключения и разобраться в нюансах.
Двигатель электрического самоката приводится в действие энергией от аккумуляторной батареи, параметры работы задаются контроллером. В зависимости от внутреннего устройства этого управляющего блока выстраивается режим работы. Электроника "ориентируется" на позицию рукоятки акселератора, данные с датчиков - например, гироскопа.
От мотора момент вращения передаётся на колёса. Современные модели самокатов имеют функцию обратной связи, или рекуперации.
Дополнительные функции контроллера
Кроме того на плате есть точки дополнительных функций, которые не выведены в общем пучке проводов. Функция срабатывает при подключении точки к общему проводу (GND). (Любой черный провод на плате это общий или GND).
Точки подписаны следующим образом:
Эта схема также встречается в контроллерах мощностью до 350 Вт, выполненных в других корпусах.
R16 (шунт) на схеме это и есть тот шунт, от сопротивления которого зависит максимальный ток, подаваемый в мотор. Для увеличения тока сопротивление нужно уменьшить, например лужением. Для уменьшения, соответственно, сделать тоньше.
Смотрите также как своими руками прошить плату (контроллер) от гироскутера под управление с ручки или педалей газа. На основе такой платы можно построить электросамокат, электровелосипед, трайк, детский электромобиль с приводом на два колеса.
Плата гироскутера с установленной прошивкой под ручку газа – отличный бюджетный контроллер для двух мотор колес. Заменяет два обычных контроллера с максимальным током до 25А.
Контроллер отлично подходит для таких проектов как:
- электросамокат
- детский электромобиль
- детский электроснегокат
- детский электротрайк
- электровелосипед
- радиоуправляемая платформа
- тележка с электроприводом
Прошьем и подготовим к подключению управления Ваш контроллер, либо отправим готовый наш с нужными Вам настройками
Устройство контроллера и АКБ
Контроллер как управляющее устройство подключается ко всей электронике в самокате: АКБ, датчикам Холла электродвигателя, замку зажигания, ручкам газа и тормоза, стоп-сигналу и фарам. Работа контроллера питания электросамоката, схема подключения и способы проверки подробно описаны в этой статье.
Аккумулятор обычно располагается снизу под декой. В среднем ёмкости АКБ на одном заряде хватает на 40-60 минут езды, за это время можно преодолеть около 30 км. Именно батарея добавляет основной вес электросамокату: средняя масса такого электротранспорта составляет 20 кг.
Чтобы выбрать современный, качественный электросамокат с гарантией, смотрите наш каталог. У нас большой выбор транспорта с электрическим двигателем для взрослых и подростков.
Пожалуй самый простой бюджетный контроллер для электровелосипеда мощностью 350 Вт с моторколесом (BLDC двигателем). Средняя цена около 700 руб. с доставкой из Китая. Несмотря на дешевизну он вполне надёжный и функциональный.
Принцип работы контроллера
Первостепенная задача этого элемента – подавать на электромотор энергию, получаемую от аккумуляторной батареи. Проходящий по обмоткам ток создает магнитное поле, которое взаимодействует с находящимися в мотор-колесе магнитами ротора. В результате колесо приводится в движение, причем частотой вращения управляет контроллер. Принцип работы контроллера электросамоката таков: он принимает сигнал от ручки газа и с учетом продолжительности поступающих импульсов регулирует скорость вращения мотора.
Кроме основной задачи, этот контролирующий и управляющий элемент:
- регулирует скорость вращения электромотора;
- управляет крутящим моментом;
- обеспечивает плавное и мягкое торможение при помощи изменения продолжительности импульсов;
- защищает электродвигатель;
- не допускает глубокой разрядки батареи – выясняет напряжение АКБ и при его критическом снижении отключает мотор от питания;
- при помощи встроенного термодатчика отслеживает температуру и не допускает токовых перегрузок.
Программатор ST-Link
Программатор ST-Link V2 доставка из Китая / доставка из РФ. Все необходимые провода для подключения будут в комплекте.
Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то нажимать её при выкрученном потенциометре в минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- нажать кнопку выключения
- перезагрузить контроллер и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля. Это так называемая “отсечка” от превышения максимальных оборотов. При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Если калибровка прошла успешно и контроллер не издает звуковых сигналов ошибки, но при этом колёса не крутятся либо крутятся медленно/с посторонними звуками, возможно необходимо подобрать правильную комбинацию фазных проводов/сигнальных проводов с датчиков Холла.
Это не все возможные настройки, а только основные которым обязательно нужно уделить внимание.
Не стесняйтесь поддержать автора этой статьи, если она оказалась полезной для Вас!
Примеры готовых прошивок
Оставлю пару примеров готовых прошивок. Они дадут возможность протестировать ваш транспорт со стандартными гироскутерными батареями.
- направление вращения моторов для самоката. Инвертирован правый мотор (оба мотора вращаются по часовой стрелке, если смотреть со стороны оси)
- максимальный ток на мотор 15 А (общий максимальный ток 30 Ампер, для такой мощности необходимо минимум 2 гироскутерных батареи включенных параллельно)
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
- направление вращения моторов для трайка
- максимальный ток на мотор (детский вариант) 7 А (общий максимальный ток 14 Ампер, достаточно одной гироскутерной батареи)
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
Калибровка ручек управления
Для обучения контроллера работе с Вашими ручками газа и тормоза необходимо сделать калибровку. Она проводится один раз и далее информация хранится в энергонезависимой памяти. При смене ручек управления на другие обучение нужно провести заново. Описание калибровки.
Прежде чем заказать контроллер для двух мотор колес у нас, ознакомьтесь с инструкцией по самостоятельной прошивке, возможно для Вас это будет более удобным вариантом.
Контроллер поставляется без корпуса. Вы должны быть аккуратны и исключить риск случайных коротких замыканий на печатной плате металлическим мусором, проводов между собой. При отключении платы от аккумуляторной батареи сохраняется заряд на электролитических конденсаторах в цепях питания. Чтобы его снять нажмите кнопку включения питания при отключенной аккумуляторной батарее.
При полностью заряженном аккумуляторе не применяйте сразу резкий электронный тормоз! В начале торможения происходит дозаряд аккумулятора рекуперацией. БМС плата защиты, установленная в аккумуляторе может отключить его в целях защиты от избыточного заряда. На контроллер при этом может поступить высокое напряжение с мотор колес, это может стать причиной выхода его из строя!
При близком полном разряде батареи нужно быть также особенно аккуратным, так как она может отключиться в неподходящий момент и электронный тормоз не будет работать!
Ограничение тока и оборотов
В зависимости от требуемой пиковой мощности в моторах и токоотдачи аккумулятора можно отрегулировать максимальный вливаемый в моторы ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает пиковый непродолжительный ток до 25 А (потребуется улучшить охлаждение). Более высокий ток на ваш страх и риск.
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – ставим на 2 Ампера больше как рекомендует автор исходника
define N_MOT_MAX 1000 – ограничение максимальных оборотов, об/мин. Это не значит что с 36 В батареей гироскутерные колеса раскрутятся до такой скорости, обороты зависят от мощности моторов, приложенной нагрузки, тока, напряжения батареи в совокупности.
Если Вы хотите понизить максимальные обороты, например для безопасности при эксплуатации транспортного средства детьми, уменьшите N_MOT_MAX экспериментально подобрав это значение для своих моторов. При этом ослабление поля из следующего пункта настроек обязательно должно быть отключено.
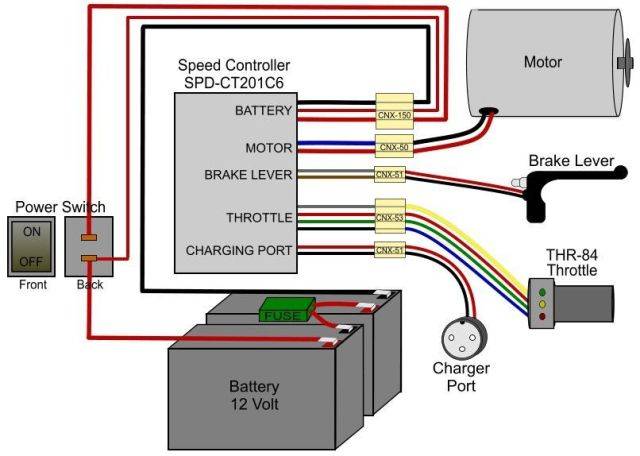
Схема подключения и распиновка контроллера электросамоката
К контроллеру подсоединяется электромотор и остальные электрокомпоненты самоката. Для их подключения используются многожильные соединительные провода в термостойкой изоляции из силикона. Совместимость контроллера с электродвигателем и АКБ электросамоката определяется по максимальному току, напряжению батареи и другим рабочим параметрам.
Рассмотрим схему подключения контроллера электросамоката и функции контактов на примере устройства, разработанного для управления трехфазными электромоторами с рабочими параметрами 36 В и 350 Вт. В таблице приведен перечень электрических разъемов контроллера, их назначение и цвета изоляционного покрытия используемых в них проводов.
Подключение к ручкам тормоза и стоп-сигналу. К общему жгуту проводов подключено 2 разъема.
Черный, желтый, красный.
Подсоединение к АКБ.
Ограничение предельной скорости.
2 белых провода.
Подсоединение к датчикам Холла электромотора.
Черный, синий, зеленый, желтый, красный.
Подсоединение к системе помощи педалям PAS.
Черный, зеленый, красный.
Соединение с замком зажигания или пультом управления.
Черный, синий, зеленый, красный.
Подключение к ручке газа.
Зеленый, черный, красный.
Электропитание мотора – используется 3 проводка.
Зеленый, синий, желтый.
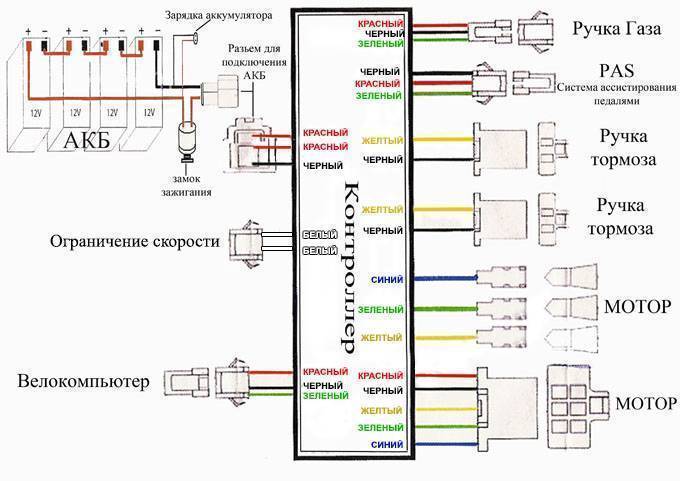
Алгоритм подключения и настройки контроллера электросамоката таков:
- Гнездо №9 подключаем к силовым проводам с идентичным изоляционным покрытием на электромоторе, а разъем №4 – к соответствующему ему гнезду от управляющих проводков.
- В случае применения пульта управления – подсоединяем его к штепселю №6. Если пульта управления нет, подсоединяем замок зажигания к красному и синему проводу гнезда №6.
- Ручку газа подсоединяем к штепселю №7, рукоятки тормоза и стоп-сигнал (при его наличии) – к №1.
- Чтобы ограничить предельную скорость, замыкаем 2 белых проводка в разъеме №3. Чтобы иметь возможность управлять возможностью ограничения предельной скорости, подключаем к нему двухпозиционный выключатель К-2Р.
- Для активации круиз-контроля подключаем кнопку на ручке газа к разъему №8. В дальнейшем для активации этой функции достаточно будет нажать и удержать кнопку на пару секунд, а для отключения – нажать на рукоятку тормоза.
- При наличии системы PAS – подсоединяем ее контакты к гнезду №5.
- Подключаем к АКБ разъем №2. Не допускаем замыкания черного и красного проводов питания!
При покупке готового комплекта компонентов для электрификации самоката отпадает вопрос, как проверить контроллер электросамоката и коммутацию его разъемов. Такая проверка выполняется в процессе предпродажной подготовки, и проводки на ответных гнездах подключаемого оборудования соответствуют цветам, обозначенным в схеме.
Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.
Далее в левом меню выбираем Inc – config.h, открывается код, в котором и проводим необходимые настройки.
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- зажимаем и удерживаем кнопку включения гироскутера в течение всего процесса
- для подключения к чипу жмем Target – Connect (альтернатива – иконка серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.
Придется её стереть. Внимание. После стирания её невозможно будет восстановить.
Снимаем защиту от перезаписи
После завершения этой манипуляции получаем чистый чип
Теперь выбираем файл своей прошивки
Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / buildVARIANT_HOVERCAR / firmware.BIN.
Я создал несколько вариантов прошивок с разными настройками и поэтому выбираю из своей папки.
После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Что понадобится для прошивки
Драйвера для программатора ST-Link V2
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)
Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии создаст файл прошивки в папке с исходником по адресу hoverboard-firmware-hack-FOC-master / pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если идет обновление компонентов Visual Studio.
Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас именно такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
Эта настройка нужна для того чтобы научить контроллер правильно измерять напряжение батареи. При вводе неправильного значения в BAT_CALIB_REAL_VOLTAGE возможно преждевременное отключение контроллера, отключение сразу после запуска.
При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.
При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:
Направление вращения моторов
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600.
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля, чем больше тем выше возможная скорость (максимум 10)
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для ограничения оборотов, ставим 1600 если наблюдается глюк при сбросе газа как описано выше
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля, рекомендуется оставить 750
Основные характеристики контроллера
- Питание от батарей с номинальным напряжением 36В, 48В
- Возможна работа моторколеса как с датчиками Холла, так и без них
- Автоматическое определение фазового угла датчиков Холла 60/120 градусов
- Номинальная мощность 350 Вт
- Максимальный ток 16-18A
- 6 FET транзисторов
- Размеры 10.3x7x3.5 см
Вопрос ремонтопригодности
Чтобы понять, подлежит ли вышедший из строя контроллера электросамоката ремонту своими руками или в мастерской, нужно снять его и осмотреть. По внешнему виду деталей несложно понять, какая из них требует замены.
Если поломка существенная, проще и дешевле заменить контроллер идентичной или универсальной моделью с подходящими рабочими параметрами. Обычно они рассчитаны на напряжение 24, 36, 48 В и мощность 200–1000 Вт. При желании можно купить набор электронных компонентов и собрать аппаратную часть контроллера самостоятельно. Но проще и безопаснее приобрести готовое изделие.
Чтобы ухаживать за своим транспортным средством, вовремя выявлять неполадки и даже просто подобрать слова и объяснить мастеру, что вас беспокоит, будет не лишним узнать принцип работы электрического самоката в общих чертах.
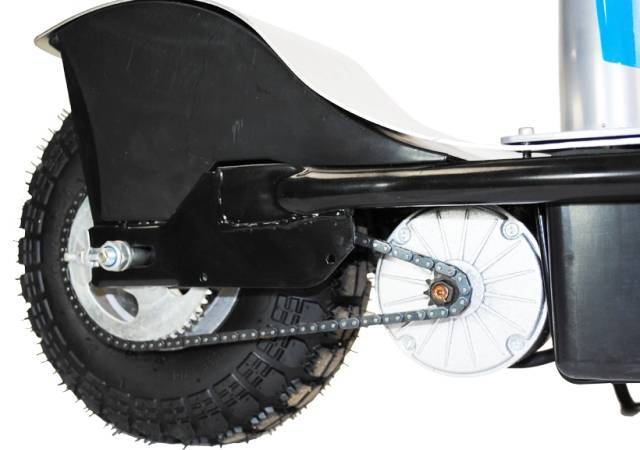
Цепной электросамокат
Электросамокат с цепью является классической конструкцией, где крутящий момент передаётся от электродвигателя на колесо через цепную передачу аналогично устройству работы велосипедов, скутеров, мотоциклов. У цепных самокатов есть два взаимосвязанных преимущества:
- Мощность двигателя
- Способность ездить по бездорожью
Мощный двигатель не требователен к качеству дорожного покрытия, способен преодолеть препятствия как внедорожник. Чтобы защитить мотор и редуктор, их помещают в герметичный короб рядом с осью.
Мы не рекомендуем рассматривать модели с ременным приводом: хотя это частный вид цепного самоката, такая конструкция ненадёжна и по многим характеристикам проигрывает другим способам устройства.
Как работает рекуперация в электросамокате
Рекуперация — свойство частично восстанавливать энергию, которая выделяется при торможении. Вместо того, чтобы кинетическая энергия преобразовывалась в тепло, её превращают в электрический ток и подзаряжают аккумулятор прямо во время движения. Это получается когда вы съезжаете с пригорка или едете на буксире у велосипеда, роликовых коньков, другого электросамоката.
Конечно, полностью заряжать аккумулятор рекуперацией — идея далёкая от реальности, иначе вы бы получили вечный двигатель. Но это удобный способ дотянуть до пункта полноценной зарядки и не тащить разряженный самокат в руках.
Типы управления и методы контроля
Для самокатов, машинок и других проектов с водителем хорошо подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, высокая энергоэффективность, свободный накат при сбросе газа.
Также в разделе ховеркар (ищите ниже)
Отключение/включение моторов
138 // Enable/Disable Motor
Читайте также: