
Подключение flysky fs i6 к компьютеру
Flysky fs-i6. Подключение с симулятору. В связи с плохими навыками управления квадрокоптером, решил что нужно .
Как подключить передатчик FlySky i6 к симулятору? Такой вопрос очень часто появляется в комментриях. Об этом мы уже .
3 способа подключения пульта радиоуправления к ПК на примере аппаратуры FlySky FS-I6, Arduino и приемника FS-IA6B: .
Как подключить RC передатчик к компьютеру и сделать провод своими руками. Видео от подписчика. Музыка .
Как правильно привязать приемник к передатчику! Рекомендую этот магазин CYMYE RC Fans Store на AliExpress.
Видео о том, как подключить самодельный кабель симулятора Flysky FS-i6 к PC через микрофонный вход. Необходимый .
Приёмник FlySky X6B, как подключить «забиндить» к аппаратуре управления, отличие от приемника FlySky I6B, .
Подключение аппаратуры Flysky с помощью платы мультипротокола к разным моделям квадрокоптеров , в том числе и .
Долгожданный урок по прошивке передатчика FlySky FS-i6 до 10 каналов. Многие волнуются не выйдет ли аппаратура из .
. FLYSKY FS-I6X. Характеристики аппаратуры можете увидеть на сайте продавца. - FS-I6X goo.gl/p0Squ1 - FS-I6 .
Сделал полный обзор радиоаппаратуры. Есть вопросы пишите ниже под видео. Разборка, смотрим что внутри .
Бюджетная аппаратура Flysky FS-i6 из Китая. Обзор всех настроек пульта ✓ Купил тут: ali.pub/41r11n ✓ Другие .
Энциклопедия моделиста. Вопрос-ответ. Как подключить и проверить электронику с приемником FlySky FS-IA6B?
Процесс прошивки\ обновления прошивки аппаратуры для радиоуправляемых моделей Flysky fs i6 Файлы прошивки и .
Всем привет! В этом видео я расскажу, как настроить фейлсейв на аппаратуре и приемнике от Flysky. Подробнее в видео.
Как привязать приемник к пульту FlySky T6 и i6. В этом видео мы подробно, пошагово рассмотрим данный вопрос. Биндить .
Приобрел самую дешевую аппаратуру Flysky fs-i6. Но как оказалось у нее очень много не раскрытых возможностей :) В .
В видео произведены замеры дальности и сделаны об этом субъективные выводы. Аппаратура flysky fs-i6 прошитая на 14 .
Очередной урок в рубрике «Советы моделистам». Многие спрашивали, как сподсоединить FlySky i6 к другому передатчику .
Аппаратура FlySky i6 очень привлекательна для новичка, который не может позволить себе много потратить на свое хобби .
Очередной урок по работе с передатчиком FlySky FS-i6. Настраиваем модель самолета Cessna 150. В этом видео .
Полный обзор бюджетных передатчиков FlySky FS-T6 и FS-i6. Мы рассказали все тонкости настройки данных аппаратур.
Чукча не блогер, сильно не пинайте. Получилось затянуто, но суть надеюсь ясна. Руководство о том, как .
В этом видео я расскажу вам как перепрошить нашу народную аппаратуру Flysky FS-I6 на 14 каналов, задействовать на .
Что собой представляет как настроить, и подключить безкорпусной приемник дистанционного управления Flysky X6B .

В этой статье мы рассмотрим с вами вопрос — как подключить Taranis и FlySky к Windows 10 и симулятору.
Сначала рассмотрим подключение Taranis.
Проблемы и неисправности с Taranis в Windows
Связывание FS-iA6B и FS-iA6B с пультом
На приемниках с штыревыми разъемами, имеющими порт «bind», вам нужно будет использовать подключаемый штекер, поставляемый с ресивером, чтобы TX и RX могли разговаривать друг с другом. При вставленном штепсельной вилке приемник загрузится быстро мигающим светом. Это означает, что он находится в режиме привязки. Чтобы связать свой FS-i6 и FS-iA10B с ним, включите TX, удерживая кнопку привязки. Процесс привязки произойдет немедленно, и RX (приемник) будет медленно мигать, показывая, что привязка успешно выполнена. В этот момент вы должны удалить свою привязку.
Настройки в полетном контроллере
Почти все. Теперь у вас есть приемник от FlySky, которого вы научили передавать RSSI, но еще не научили принимать такую информацию полетного контроллера.
Подсоедините приемник к полетному контроллеру. Подсоедините полетный контроллер к компьютеру и зайдите в конфигуратор (например, в Betaflight). На вкладке «Конфигурация» снимите флажок с «Analog RSSI», если он там стоит.
Теперь перейдите на вкладку «Приемник» и установите значение в «RSSI Channel» в зависимости от прошивки, которую вы скачали с репозитория. У меня это IA6B_rssi_ch8.bin, поэтому нужно выбрать «CH8».
Теперь у вас есть RSSI, поздравляю! Если оно не выведется на экране, зайдите на вкладку конфигуратора — OSD и настройте вывод в нужном месте экрана.
Если у вас пульт не прошит на 14 каналов, ничего страшного, так как значение RSSI создается самим передатчиком.
Удаленное управление роботом, актуальный вопрос, которого в то или иной степени касался каждый Конструктор роботов. Когда мой коллега, приобрел систему дистанционного управления FlySky, я отнесся к этому как к шагу назад, рассуждая, что мы и самостоятельно сможем делать подобные системы. Но, как показало время, создание качественных систем дистанционного управления непростая и недешевая задача. После того, как мы сделали и оттестировали один пульт на основе NRF24L01 и сконструировали несколько систем обмена информацией между роботами на основе данных модулей, я сделал вывод, что есть случаи, когда приобрести готовую систему дистанционного управления будет и дешевле и лучше/не хуже в эксплуатации.
Рисунок 1
В свое время также рассматривался вопрос удаленного управления по каналу Bluetooth («Мобильные роботы на базе Arduino»), это удобный и мало затратный способ, но имеет ряд ограничений:
- малая дальность (до 10 метров) что вполне достаточно для помещений, но затрудняет или делает не возможным управление роботами квадрокоптерами или гоночными болидами и пр.;
- низкая защита от помех, при зашумленности «эфира», возможны разрывы и «подтормаживания» соединений, что не страшно при связи с гарнитурой, но может привести робота к аварии;
- удобство - управление с экрана смартфона или планшета не возможно без визуального контроля, т.е. нужно периодически смотреть на экран, ведь рычаги управления не имеют тактильной обратной связи, они просто нарисованы на экране.
И, в связи с наличием перечисленных мнений и ограничений, попытаюсь рассказать о способах подключения к контроллеру Arduino (на примере ESP32) аппаратуры удаленного управления Flysky, на примере FS-i6 (рис.2).
Рисунок 3
Питание приемника осуществляется через верхний ряд контактов B/VCC, ряды CH1-CH6 , это выходы, и если питание с приемника брать не нужно, то потребуется использовать только левый столбец контактов, на которых приемник генерирует ШИМ сигнал с шириной импульса соответствующей положению рычажков на передатчике. Замечу, что генерация ШИМ-сигналов приемником, это отсыл к моделям, которые не имеют собственного микроконтроллера, и двигатели которых управляются непосредственно с пульта. Т.е. пульт подключается напрямую к сервомашинкам самолета, которые регулируют положение руля, подкрылков и …, я не специалист в области летательных аппаратов.
Но наши модели являются роботами, они имеют собственные микроконтроллер, который и должен обслуживать сигналы дистанционного управления. Для этого их нужно расшифровать, а конкретно в случае ШИМ сигналов нужно измерить длительность импульса в такте. Измеряем длину импульса в каждом интересующем нас канале и используем по назначению.
Простейший участок кода, отвечающий за обработку входных ШИМ последовательностей, выглядит следующим образом:
«Все листинги приведены для использования с контроллером ESP32».
GPIO13 -> CH1
GPIO14 -> CH2
GPIO27 -> CH3
GPIO26 -> CH4
Приемник FS-iA6 и ESP32 от одного источника питания 5 вольт.
Рисунок 5
Применяя функцию pulseIn(), поочередно измеряем длину импульса, на каждом GPIO к которому подключен ШИМ канал от приемника.
pulseIn() может применяться с двумя или тремя параметрами: первый – номер GPIO, второй –тип ожидаемого сигнала , третий – максимальное время ожидания. pulseIn() измеряет длину в микросекундах импульса на GPIO.
У вышеприведенного кода есть один существенный минус –считывание всех сигналов производится последовательно и возможно в разных циклах, что приводит нас к расчету максимальной задержки, которая равна сумме времени ожидания каждого вызова pulseIn().
Давайте попробуем исследовать сигналы не по очереди, а параллельно!
ESP32 быстрый контроллер, его частота 240МГц, и сильно оптимизировать код под него не нужно, хоть это возможно.
Разработаем алгоритм параллельного опроса GPIO в цикле с дискрецией 5мкСек. Сканируем GPIO в цикле, отлавливаем сигналы и измеряем их длину. Основная программа приведена ниже, а функция сканирования расположена в файле intpilt.h , там также описание всех сопутствующих переменных и прочее.
bool Canal1, Canal2, Canal3, Canal4; bool ScanC1, ScanC2, ScanC3, ScanC4; bool flagCanal1, flagCanal2, flagCanal3, flagCanal4;
bool C1Err, C2Err, C3Err, C4Err, C5Err, CSErr; uint16_t Canal1Timeoff, Canal2Timeoff, Canal3Timeoff, Canal4Timeoff;
uint16_t Canal1Time, Canal2Time, Canal3Time, Canal4Time;
// Перед запуском: // 1. Поднимаем ScanC1=true // 2. Canal1Time = 0; // 3. Canal1Timeoff =0;
// 4. Canal1 = true; //На случай, если начали считывание с 1, нужн ждать пока она кончится
// 5. flagCanal1 = false; //Начало нормального импульса
void setup_CHANEL()
pinMode(pinCanal1, INPUT);
pinMode(pinCanal2, INPUT);
pinMode(pinCanal3, INPUT);
pinMode(pinCanal4, INPUT);
>
void ScanCHANEL()
uint32_t LERRUA;
ScanC1 = true; ScanC2 = true; ScanC3 = true; ScanC4 = true; Canal1Time = 0; Canal2Time = 0; Canal3Time = 0; Canal4Time = 0;
Canal1Timeoff = 0; Canal2Timeoff = 0; Canal3Timeoff = 0; Canal4Timeoff = 0; Canal1 = true; Canal2 = true; Canal3 = true; Canal4 = true;
flagCanal1 = false; flagCanal2 = false; flagCanal3 = false; flagCanal4 = false; C1Err = false; C2Err = false; C3Err = false; C4Err = false;
unsigned long tt, tectime, end_time;
tectime = micros();
end_time = tectime + MAXTIME + DELTA;
while ((tectime MAXTIMECANAL) C1Err = true;
ScanC1 = false;
>
>
else ScanC1 = false;
>
>
else //Если не поднят флаг расчет длины импульса
if (Canal1) //Если в канале 1, то мы в начале
Canal1 = digitalRead(pinCanal1);
>
else
Canal1 = digitalRead(pinCanal1);
if (Canal1)
Canal1Time = DELTA;
flagCanal1 = true;
>
else
Canal1Timeoff += DELTA; if (Canal1Timeoff > MAXTIME) ScanC1 = false; //Завершили
>
>
>
>
//============= C2
if (ScanC2) //Если поднято считывание с канала
if (flagCanal2) // Если поднят расчет длины импульса
Canal2 = digitalRead(pinCanal2);
if (Canal2) Canal2Time += DELTA;
if (Canal2Time > MAXTIMECANAL)
C2Err = true;
ScanC2 = false;
>
>
else
ScanC2 = false;
>
>
else //Если не поднят флаг расчет длины импульса
if (Canal2) //Если в канале 1, то мы в начале
Canal2 = digitalRead(pinCanal2);
>
else
Canal2 = digitalRead(pinCanal2);
if (Canal2)
Canal2Time = DELTA;
flagCanal2 = true;
>
else
Canal2Timeoff += DELTA; if (Canal2Timeoff > MAXTIME) ScanC2 = false; //Завершили
>
>
>
>
//===== C3
if (ScanC3) //Если поднято считывание с канала
if (flagCanal3) // Если поднят расчет длины импульса
Canal3 = digitalRead(pinCanal3);
if (Canal3) Canal3Time += DELTA;
if (Canal3Time > MAXTIMECANAL)
C3Err = true;
ScanC3 = false;
>
>
else
ScanC3 = false;
>
>
else //Если не поднят флаг расчет длины импульса
if (Canal3) //Если в канале 1, то мы в начале
Canal3 = digitalRead(pinCanal3);
>
else
Canal3 = digitalRead(pinCanal3);
if (Canal3)
Canal3Time = DELTA;
flagCanal3 = true;
>
else
Canal3Timeoff += DELTA; if (Canal3Timeoff > MAXTIME) ScanC3 = false; //Завершили
>
>
>
>
//===== C4
if (ScanC4) //Если поднято считывание с канала
if (flagCanal4) // Если поднят расчет длины импульса
Canal4 = digitalRead(pinCanal4);
if (Canal4) Canal4Time += DELTA;
if (Canal4Time > MAXTIMECANAL)
C4Err = true;
ScanC4 = false;
>
>
else
ScanC4 = false;
>
>
else //Если не поднят флаг расчет длины импульса
if (Canal4) //Если в канале 1, то мы в начале
Canal4 = digitalRead(pinCanal4);
>
else
Canal4 = digitalRead(pinCanal4);
if (Canal4)
Canal4Time = DELTA;
flagCanal4 = true;
>
else
Canal4Timeoff += DELTA; if (Canal4Timeoff > MAXTIME) ScanC4 = false; //Завершили
>
>
>
>
tt = micros();
while (tt
Теперь блок сканирования будет выполняться за время равное длине одного такта, 21 миллисекунд в нашем случае. Время уменьшено в 4 раза для 4х каналов, для 6 каналов, будет 6 раз соответственно.
Но, по-моему, все равно время велико!
Тратить 21 миллисекунду впустую тогда, когда наш контроллер мог бы производить полезные вычисления траектории робота или сканировать датчики, поэтому перейдем к рассмотрению приемника FS-iA6B.
А именно – добавляем адресные GPIO
Вот ка выглядит теперь основная программа:
Рисунок 9
Обрабатываем входной буфер порта ввода/вывода IBus.loop() , записываем данные о состоянии рычажков передатчика в переменные и всё. Соединение использует только один GPIO (вывод нами не используется), прием данных в буфер порта проходит на аппаратном уровне и может не задерживать выполнение программы.
Вот так, затратив только одну GPIO контроллера ESP32, мы подключили приемник, причем у меня он передает на контроллер 10 значений состояния рычажков управления, а может 14, где взять еще 4 рычажка?
Подготовка и настройка Taranis для подключения к Windows 10
Сначала нажмите MENU. Затем нажмите кнопку Минус (-) и прокрутите вниз до пустого слота.
После того, как дойдете до пустого места, нажмите и удерживайте Enter (ENT). Выберите «Create Model» и еще раз нажмите ENT. Далее, кнопками плюс и минус выберите картинку квадрокоптера и снова нажмите ENT.
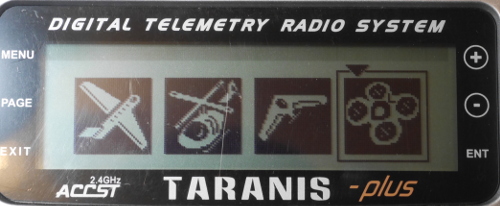
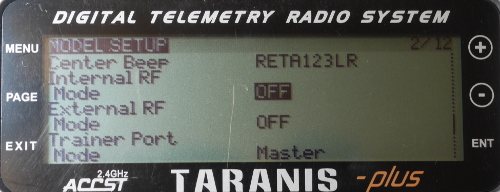
Теперь нажмите кнопку PAGE 4 раза, пока не дойдете до этого меню:
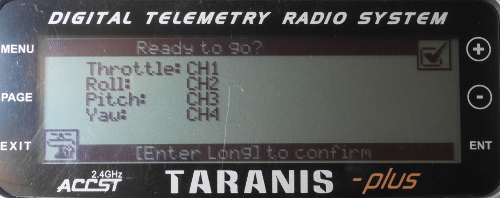
Далее нажмите и удерживайте ENT, пока не появится еще одно меню и будет возможность добавить новую модель:
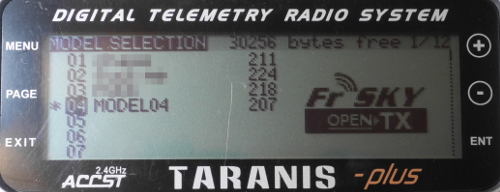
Выберите новую строчку модели и удерживайте PAGE, затем поменяйте название на то, которое вам нравится. Если во время выбора букв нажать и удерживать ENT, то буква станет заглавной. После ввода названия нажмите EXIT.
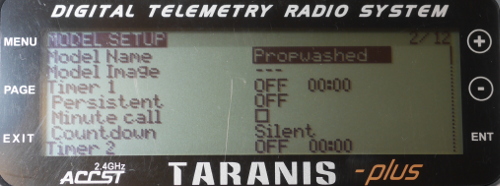
Далее прокрутите вверх, используя +, там вы увидите строчки Internal и External RF — они должны быть в значении OFF. Это нужно, чтобы не включать радио, пока пульт подключен к компьютеру. Если у вас оно ON, то выберите строчку, нажмите ENT, затем минус (-) и снова ENT.
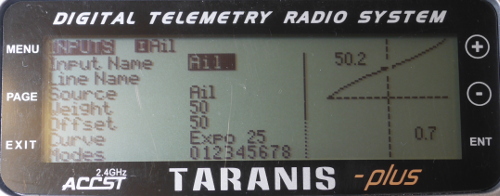
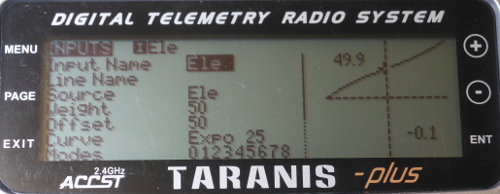
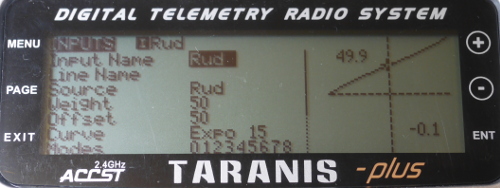
Далее нажмите кнопку PAGE. Вы перейдете на страницу Inputs (5 из 12). Там будет примерно такое:
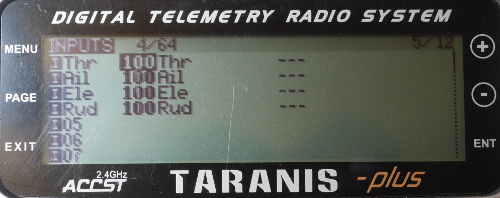
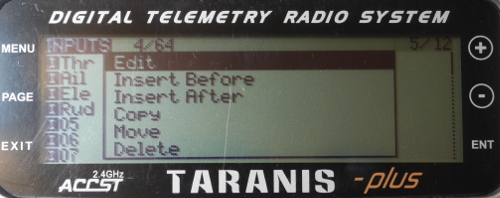
По умолчанию здесь все параметры имеют диапазон 100, но нам нужно сделать везде 50. Для этого выбираем Thr, жмем ENT, здесь увидите меню, жмем ENT еще раз (получается, что мы активируем Edit, т.е. редактирование).
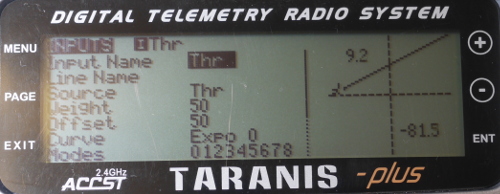
Далее, выставляем значение 50 у Weight и Offset. Справа будет график и при изменении цифр он тоже будет меняться. Аналогичные действия нужно сделать для 3 остальных настроек.
Чтобы вам было более понятно, можете посмотреть видео одного автора:
Проверка настроек Taranis в Windows
Ничего особенного делать для подключения не нужно. Просто подключите пульт к компьютеру и Win 10 сама установит драйвера.
Далее пройдите в меню (пуск) и выберите (либо введите в поиске) «Устройства и принтеры». Найдите игровое устройство, скорее всего, оно будет называться «FrSky Taranis Joystick» или «8 axis 8 button device» и выглядеть примерно так:
Нажмите правой кнопкой мыши по значку и выберите «Настройки игрового контроллера». Выберите Taranis и нажмите «Свойства». Откроется окно с индикаторами. Подвигайте все стики и переключатели на пульте — точные движения должны повторяться и в этом окне:

Проблемы с USB, ПК не видит пульт
Некоторые кабели могут не подходить, попробуйте другой. Проблема может быть только в неподходящем кабеле, во всех других случаях ПК всегда увидит пульт. Возможно, у вашего кабеля нет контактов для обмена данными, а только для питания (+ и -), это если вы используете кабель от зарядника. Чтобы проверить, годится ли кабель для передачи данных, подключите с помощью него плеер или телефон и попробуйте перекинуть какой-нибудь файл. Если получилось, значит, кабель подходит.
Настройка iBus в Betaflight
В настройке нет ничего сложного. Для начала, всегда снимайте пропеллеры, зачем подкючаем по USB дрон к компьютеру, запускаем Betaflight и нажимаем Connect.
- Переходим во вкладку «Ports», там включаем Serial RX, на том порту (порты слева UART1,2,3), к которому вы подключили. Как это понять? Посмотрите схему вашего полетного контроллера, там все порты будут с подписями.
Нажимаем Save and Reboot - Переходим во вкладку «Configuration». Выбираем «RX_SERIAL» в блоке «Receiver Mode», а также выбираем «IBUS» в блоке «Serial Receiver Provider».
Снова нажимаем Save and Reboot. - Далее переходим во вкладку «Receiver». В блоке «Channel map» выбираем «Futaba» или «AETR1234». Это стандартные протоколы и их менять обычно не нужно.
Жмем Save. - Теперь убедитесь, что все переключатели работают (а также переключатели снятия с охраны и переключатели режимов полета), они должны быть на отметке 1500, кроме газа, газ должен быть на 1000, когда стик находится в нижнем положении. Подробнее, как сделать так, чтобы все значения были на отметке 1500, можете почитать в этой стать: Betaflight configurator, настройка на русском.
Разбор приемника и припаивание программатора
Вам нужно снять кейс, если у вас приемник в корпусе (например, i6b).
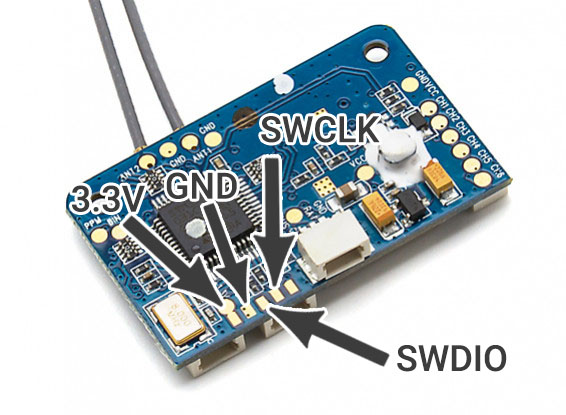
Затем, найдите контактные площадки:
На программаторе ST-Link V2 они обозначаются точно также. Вам нужно подключить колодки с проводами к программатору и следуя маркировке, припаять провода к приемнику.

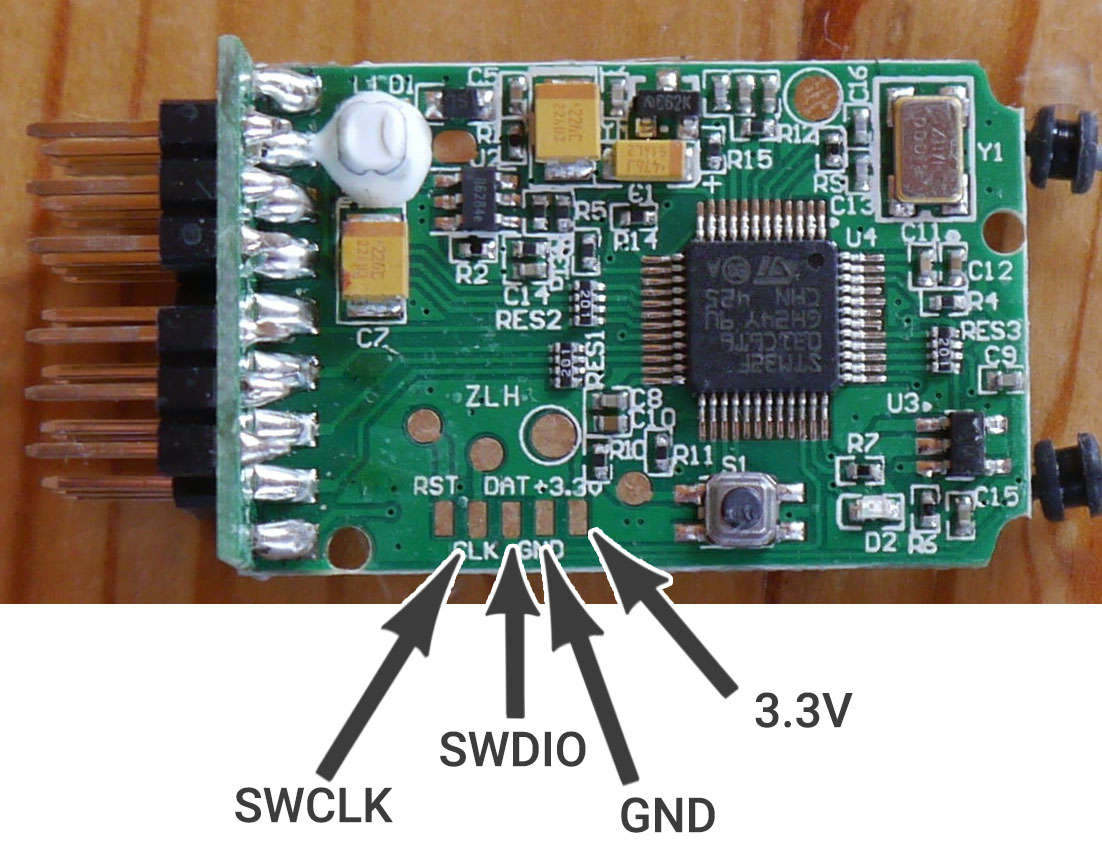
IA6B
И несколько распиновок других приемников:
X6B
IA6C FS-X14S
Не перепутайте при подключении пины 5V и 3.3! В противном случае, приемник сгорит.
Также, не подключайте ST-link к компьютеру до установки драйверов!
Проблемы в симуляторе, неправильный полет и другие проблемы
Здесь ничего особенного не сделать, так как проблема в самой игре. Попробуйте скачать другой симулятор или покопаться в настройках: возможно, нужно будет инвертировать стики или уменьшить мертвую зону стиков. В общем, смотрите настройки конкретного симулятора.
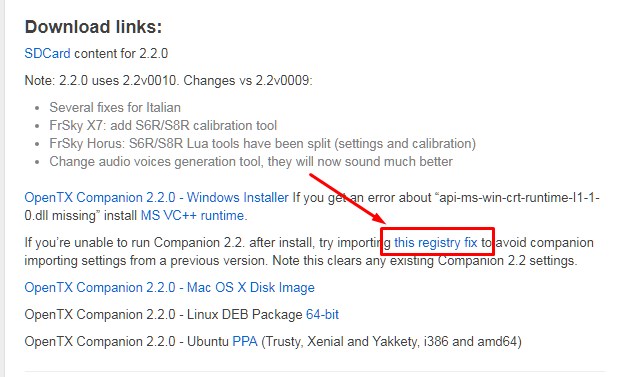
Установка программного обеспечения
Вам нужно скачать и установить:
Там нужно зарегистрироваться, это обязательный шаг.
Прошивки скачиваются из репозитория Github:
Там по 2 прошивки на каждый приемник — для 8 канального и 14 канального: если вы используете соединение через PPM, то качайте 8 канальную, если iBUS, то любую (8 или 14).
Откройте программу ST-Link (которую вы скачали по ссылке выше). У вас должно быть все так:
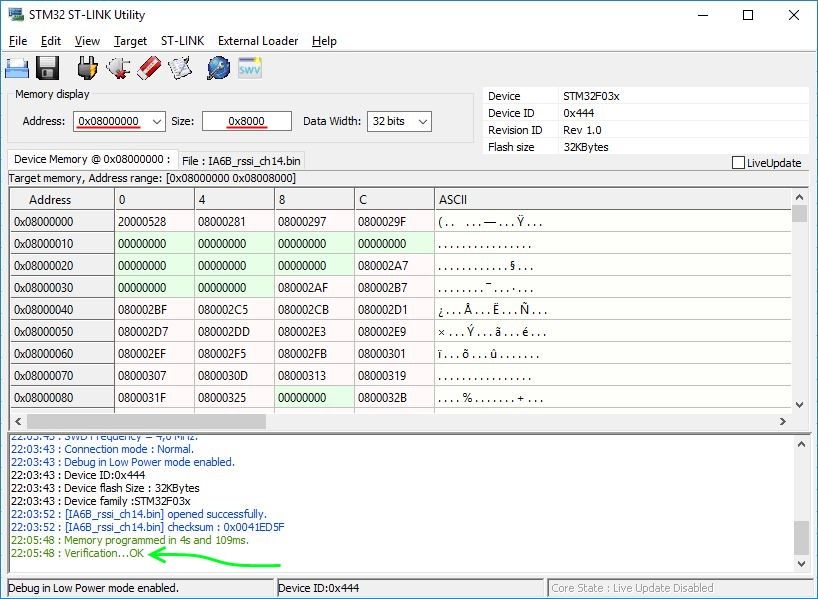
- Установите «Address field» и «Size» на 0x08000000 и 0x8000.
- Нажмите «Connect to target» (кнопка под меню).
- нажмите «Save» чтобы скачать и сохранить оригинальную прошивку.
- Нажмите «Open» и выберите прошивку, которую вы скачали с репозитория Гитхаба.
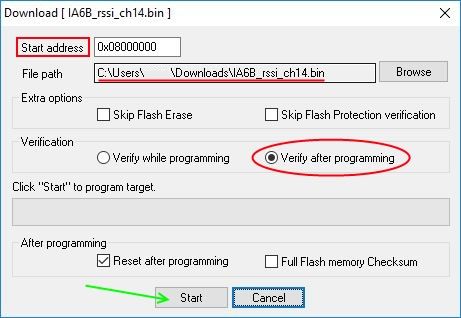
- Нажмите «Program verify», должно появиться окно:
- Проверьте, что «Address» и «File Path» правильные. они должны быть «0x08000000» и путь, куда вы скачали файл прошивки.
- Выберите «Verify after programming».
- Нажмите «Start».
- Если вы увидели после этого «Verification…OK» зеленым цветом, значит все прошло успешно.
После такой прошивки пропадет привязка приемника к передатчику (пульту), поэтому процедуру «binding» придется пройти еще раз, кроме приемников A8S и 8A, так как идентификатор передатчика (пульта) они записывают в EEPROM, а эта память не стирается при прошивке.
Модель симулятора настроена не верно
Если вы пропустили шаг с настройкой дополнительной модели для симулятора в Таранисе, то у вас могут возникнуть проблемы при подключении к ПК. Сделайте все шаги из пункта «Подготовка и настройка Taranis для подключения к Windows 10», а также проверьте, что значения установлены на 50, а не 51, например.
Настройка FailSafe
Важная функция — настройка того, что будет делать дрон, если произойдет потеря сигнала с аппаратуры управления.
Посмотрите на значение Receiver, какое там будет значение:
В нижнем положении стика Газ эта цифра не должна быть выше значения 1000. Если оно выше, читайте статью по ссылке выше или уменьшите это число через меню настроек в пульте.
Теперь нам нужно настроить пульт так, чтобы при выключении пульта или потери сигнала, приемник на дроне дал команду контроллеру на снижение оборотов двигателей. Заходим в меню пульта в «End Point», выбираем канал Ch3 и кнопкой ОК увеличиваем значение до 101%:
Нажимаем Cancel и удерживаем для сохранения настроек. Теперь идем в бетафлай и проверяем значение (раздел Receiver). Поднимаем до упора стик газа и опускаем до самого низа. Значение должно быть немного ниже 1000, например 996.
Теперь возвращаемся в меню «System Setup». Выбираем «RX Setup» и потом «Failsafe»:
Выбираем « Channel3″ с помощью кнопок Up и Down сделайте -101% как на картинке выше, нажимаем OK. Снова идем в бетафлай и проверяем, какие у нас там будут цифры. Если значение больше 1000, то в «End Point» увеличиваем значение до 102%.
Далее, в Betaflight Configurator нужно настроить сам режим FailSafe, для этого включаем режим эксперта, эта кнопка находится здесь:
Далее, переходим во вкладку «FailSafe», и в блоке «Valid Pulse Range Settings» ставим значение «996»:
Нажимаем Сохранить и перезагрузить.
Теперь нужно убедитсья, что файлсэйф работает, для этого переходим во вкладку Receiver, включаем аппаратуру и дрон и смотрим на значение газа, оно должно быть 1000. Теперь отключаем пульт, значение газа должно стать 996.
Вот и все, вы настроили FailSafe. Теперь, при потере связи, дрон будет падать, либо опускаться, а не лететь дальше, пока аккумуляторы не сядут.
Если вы повредили антенны этого приемника и вам нужно их поменять, тогда прочитайте эту статью: Как поменять антенны приемника fs-ia6b и fs-ia10b
Многие пилоты гоночных квадрокоптеров и других авиамоделей, начинают свой пусть с бюджетной аппаратуры FlySky, у которой во многих приемниках нет функции RSSI.
Если вам лень читать статью выше, то короткий ответ на вопрос, что такое RSSI — это показатель уровня сигнала между квадрокоптером и пилотом. На самом деле, это очень важная функция, чтобы всегда знать, в какой момент вы можете потерять управление и как далеко можно лететь.
В этой статье вы узнаете, как и чем прошить приемник FlySky, чтобы у него появилась функция RSSI.
Подключение FlySky к компьютеру и симулятору
FlySky можно подключить к ПК двумя способами — нормальным способом с помощью кабеля или кастомным-кулибинским с помощью аудиокабеля Jack 3,5 мм.
Кабель выглядит вот так:

Подключается к разъему в задней части пульта:

С кабелем все просто, подсоединили к пульту, подсоединили к ПК, далее заходим в симулятор и калибруем.
Но что делать, если кабеля нет, а полетать хочется? Для этого смотрим видео от блогера AlexGyver, чтобы перейти сразу к нашему вопросу, перемотайте на 16:31:

Подключение приемника
Прежде чем настраивать квадрокоптер, нужно привязать к нему приемник FlySky. Для этого подключите разъем приемника к полетному контроллеру и подключите аккумулятор к дрону. Не забудьте снять пропеллеры перед этими действиями! Если вы правильно подключили приемник к контроллеру, то на нем замигает светодиод. Теперь включите пульт. Пульт начнет пищать, сообщая о том, что сигнала нет, но через пару секунд перестанет, значит он поймал сигнал с приемника.
Также, если вы не знаете, как подключать провода от полетного контроллера к приемнику, посмотрите это видео:
Настройка каналов
Единственная настройка, которую нужно сделать, это привязать переключатели режимов на пульте к каналам 5 и 6. Я рекомендую сделать 1 канал на постановку и снятие с охраны дрона, а второй на переключение режимов полета (стабилизация или акро). Как это сделать, читаем ниже:
Компоненты и приемники
Я использую обычный передатчик (пульт) FS-I6:

Для прошивки подойдут только приемники:
- FS-IA6B;
- FS-IA6C;
- FS-IA8X;
- FS-X6B;
- FS-X8B;
- FS-8A;
- FS-A8S;
- FS-IA10B;
- FS-X14S.
Ссылки на приемники и их технические характеристики, можно посмотреть здесь: Приемники Flysky — полный список приемников бюджетной аппаратуры
Также, вам понадобится:
Установка и настройка FlySky FS-iA6B и FS-iA10B
Betaflight поддерживает PWM-приемники, но я настоятельно рекомендую купить приемник, который работает по протоколу iBUS.
iBUS — это цифровой протокол, такой же как SBUS, но у него меньше задержки и более высокая точность сигнала управления, а также его немного легче установить, за счет минимального количества проводов.
В настоящее время на рынке есть два приемника FlySky, которые поддерживают iBUS:
FS-iA6B и FS-iA10 — этот приемник (ресивер) для полетов на гоночных квадрокоптерах. Они компактные, их легко можно установить в мелкий дрон, у них крепкий корпус, но антенные не съемные.
Отличие FS-iA6B от FS-iA10 лишь в том, что в первом 6 каналов связи, а во втором — 10 каналов. Для гоночного квадрокоптера будет достаточно 6 каналов (4 управление, 1 канал на переключался режимов полета и 1 канал на пищалку для поиска дрона в траве). 10 канальные приемники используют чаще на съемочных самосборных квадрокоптерах, либо, если на гоночный вешают ненужные для гоночного датчики, типа GPS и т.д. и чтобы их включать, нужны дополнительные каналы.
A8B — этот приемник имеет правый форм-фактор, и зато съемная. Эти приемники без корпуса и требуют защиты.
Приемник FS-iA6 и FS-iA10, который поставляется со многими аппаратурами FlySky i6 и i10, в настоящее время не поддерживает iBUS. Это исправят в ближайшем будущем с релизом новой версии Betaflight 3.1. Это потребует сделать небольшую модификацию приемника, но это стоит сэкономленных денег. Приемник подключается к порту UART на полетном контроллере, и кстати, его можно установить в любой UART, так как он не требует последовательности, в отличии от SBUS. Однако, вы не должны подключать ваш приемник IBUS к выходу с надписью «SBUS». В этой статье я буду подключать приемник к порту UART3.


FS-iA6B и FS-iA10B имеет два порта iBUS, расположенных на верхних шести контактах приемник. Слот «SENS» предназначен для подключения телеметрии в FS-iA6B и FS-iA6B. Телеметрия iBUS еще не поддерживается в Betaflight, но она есть. Слот «SERVO» — это выход iBUS от приемника, к которому подключается сервопровод, выходящий из полетного контроллера.

Здесь он стоит боком, но можно поставить и нормально, смотря сколько у вас там места есть.
Переплет и настройка переключателей режимов Прежде чем настраивать свое радио, вам нужно привязать к нему приемник FlySky. Для этого вам нужно включить питание вашего квадроцикла с подключенным штекером, вставленным в приемник. Сначала удалите реквизиты и подумайте о том, чтобы использовать устройство дымоудаления, если это первый раз, когда вы включаете квадроцикл.
Читайте также: