
Где откладывается вектор скорости нашего судна на планшете
Такая задача может решаться при занятии исходной позиции для совместного применения оружия группой кораблей с нескольких направлений, для быстрейшего выхода на угрожаемое направление относительно охраняемых сил при плавании в составе соединения и т. п.
Для выхода в кратчайший срок на заданное относительно объекта маневра направление необходимо маневрировать курсом, перпендикулярным заданному направлению. В этом случае длина отрезка абсолютного перемещения маневрирующего корабля будет наименьшей. Действительно, построив треугольник скоростей K0аb (рис. 4.11), где вектор Vм перпендикулярен заданному пеленгу П1 и направлен в сторону этого пеленга, находим вектор относительной скорости Vr, а в точке пересечения линии относительного курса, проведенного из начальной позиции маневрирующего корабля М0, с линией заданного пеленга получим относительную позицию М '1.
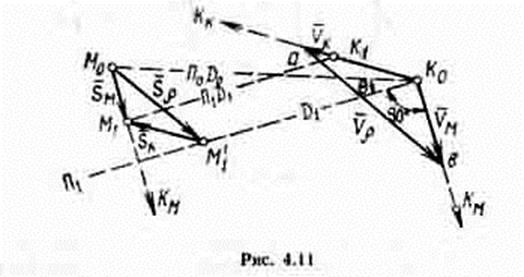
Из треугольника перемещений М0М1М '1 видно, что абсолютное перемещение корабля М0М1 является кратчайшим расстоянием до линии заданного пеленга, так как угол М0М1К1 - прямой. Кратчайшим поэтому является и время маневра, которое можно рассчитать как через элементы относительного движения, так и через элементы абсолютного движения.
Помимо курса и времени искомым элементом в данной задаче является также дистанция в момент выхода на заданное направление, так как, стремясь к быстрейшему изменению направления, можно выйти за пределы диапазона выгодных дистанций. Эту дистанцию D1 = К0М '1 необходимо измерить, построив треугольник позиций М0К0М '1. Может оказаться, что эта позиция будет невыгодна по дистанции. В этом случае целесообразен маневр выхода на заданное направление и избранную выгодную дистанцию, то есть должен быть применен общий случай перемены позиции.
4.8.5 Критический курсовой угол
При решении задач на изменение позиции относительно объекта маневра может оказаться, что Vм < Vк. Тогда критерием возможности занятия заданной позиции маневрирующим кораблем служит сектор возможных относительных курсов (СВОК). Его можно определить графически. Для этого из конца вектора скорости объекта маневра Vк необходимо провести касательные к окружности радиуса, равного скорости хода маневрирующего корабля (рис. 4.12). Сектор bас, ограниченный предельными относительными курсами маневрирующего корабля, и есть СВОК. В этом секторе располагаются все возможные относительные курсы маневрирующего корабля. СВОК, вершина которого совпадает с начальной позицией, называют сектором доступных позиций (СДП).
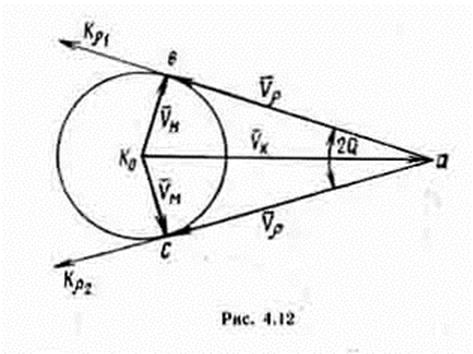
Наибольший курсовой угол объекта маневра, при котором маневрирующий корабль, имея скорость, меньшую скорости объекта маневра, еще может сблизиться с ним при постоянстве пеленга, называется критическим курсовым углом и обозначается Q.
Из DК0аb следует: sin Q = Vм / Vк, откуда Q = arcsin Vм / Vк. Поэтому для оценки возможностей сближения с объектом маневра (при Vм < Vк) кроме графических построений пользуются сравнением текущего курсового угла объекта маневра (цели) с критическим Q. Условие сближения на заданную дистанцию при постоянстве пеленга: qк £ Q. Если qк = Q, линия курса маневрирующего корабля должна быть перпендикулярна линии пеленга (qм = 90°).
4.8.6 Удержание позиции
Как правило, в этом случае позиция задается курсовым углом объекта маневра qк3 н дистанцией Dз. Задачу удержания позиции очень часто приходится решать при совместном плавании, когда охраняемый корабль (уравнитель) изменяет курс, а корабль охранения должен удерживать заданную позицию. Кроме того, задача удержания позиции решается при слежении за противником, при применении оружия и в некоторых других случаях.
Пусть кораблю охранения приказано маневрировать относительно охраняемого корабля, следующего курсом Кк0 со скоростью Vк, удерживая постоянными его курсовой угол qк3 и заданную дистанцию D3.
Перед началом выполнения маневра флагман сообщает на маневрирующий корабль время изменения своего курса и его новое значение Кк1. Корабль охранения должен осуществлять маневр для сохранения ранее заданной позиции, то есть к концу маневра ему необходимо быть на первоначально назначенных курсовом угле qк3 и дистанции от уравнителя D3.
С этой целью определяется курс маневрирующего корабля Kм при заранее назначенной скорости хода Vм для занятия заданной позиции относительно нового курса объекта маневра и время маневра.
На маневренном планшете задача решается как частный случай изменения позиции. Начальная позиция маневрирующего корабля М0 (рис. 4.13) наносится по пеленгу П0 = Кк0 ± qк3 и дистанции D3. Относительная позиция М '1 в момент окончания маневра наносится по пеленгу П1 = Кк1 ± qк3 и дистанции D3. Соединив точки K0, М0 и М '1, получим треугольник позиций К0М0М '1, сторона М0М '1 которого представляет собой вектор относительного перемещения Sr.
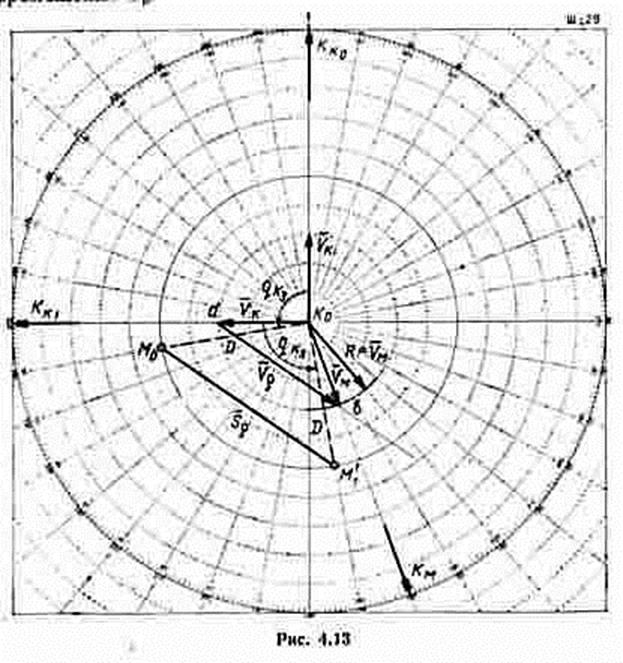
Построение треугольника скоростей производится при точке К0 на линии нового курса объекта маневра Кк1. Для этого по линии курса Кк1 откладывается вектор скорости Vк и из его конца (точка а) проводится линия параллельно вектору Sr и в том же направлении до пересечения с окружностью, равной (в принятом масштабе) скорости маневрирующего корабля Vм. Соединив центр планшета с полученной точкой, получим треугольник К0аb, сторонами которого являются векторы скоростей Vм, Vк, Vr. Направление вектора скорости Vм определяет курс маневрирующего корабля Км для удержания заданной позиции относительно объекта маневра. Время маневра t определяется из отношения Sr / Vr. Если изменение курса объектом маневра осуществляется в сторону от маневрирующего корабля, а Vм < Vк, такая задача решения не имеет.
Примечание. В принципе, точка У выбирается произвольно, однако, на практике удобнее ее устанавливать через интервал времени, кратный интервалу времени между наблюдениями, т.к. в этом случае достаточно измерителем снять расстояние между точками наблюдения и отложить этот раствор от последней точки на продолжение ЛОД. Поскольку время между наблюдениями обычно принимается 3 мин., то и точка упреждения устанавливается через интервал, кратный 3 мин.
Из множества возможных вариантов судоводитель должен выбрать оптимальный, руководствуясь рядом условий:
· соблюдение правил МППСС;
· наличие других судов;
· наличие навигационных опасностей;
· особенности своего судна;
· другие обстоятельства, могущие повлиять на безопасность маневра.
В общем случае маневр курсом предпочтительнее маневра скоростью. Дело в том, что на изменение скорости требуется больше времени, чем на изменение курса, и кроме того, потеря скорости превращает судно в пассивного наблюдателя за развитием ситуации. И если ситуация начнет развиваться в опасную сторону, то потерявшее скорость судно будет уже не в состоянии предотвратить столкновения поскольку на разгон судна уходит существенно больше времени, чем на торможение. Только для относительно небольших судов нет разницы как маневрировать при расхождении - курсом или скоростью.
И еще одно замечание. Обычно, при расчете маневра курсом просто поворачивают вектор своей скорости. Правила МППСС требуют при расхождении избегать небольших изменений курса, чтобы другое судно могло однозначно понимать ваш маневр. Исходя из этого обычно рекомендуется в подобных случаях изменять курс не менее чем на 30 о . Однако, выход судна на циркуляцию всегда приводит к падению скорости (так при повороте на контркурс падение скорости может достигать 50% от первоначальной скорости). Это не всегда может иметь существенное значение, но помнить об этом следует.
Пошаговые действия для расхождения
с одним судном:
Наносится вектор скорости нашего судна
Делаются замеры пеленга и дистанции встречного судна
В таблицу записываются соответствующие данные
4. на планшете ставится точка, соответствующая положению встречного судна
5. в полученную точку параллельно переносится и "втыкается" вектор скорости нашего судна
Через 3 мин. повторяются пункты 2-4
Еще через 3 мин. повторяются пункты 2-4
По трем точкам строится ЛОД
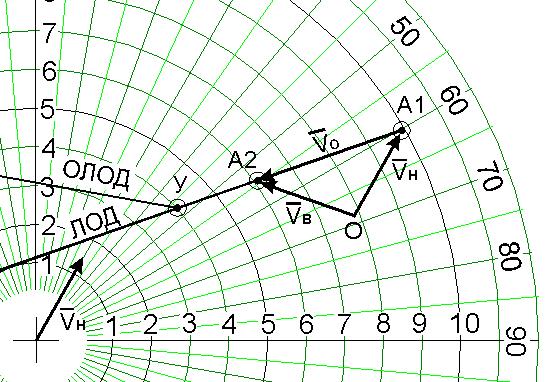
9. достраиваются векторы V о и Vв
Оценивается ситуация и принимается решение предпринять маневр
Устанавливается точка упреждения У
Прокладывается ОЛОД
13. ОЛОД параллельно сносится в последнюю точку "скоростного треугольника" (треугольника, образованного векторами Vн ,Vв и Vо )
14. вектор Vн поворачивается (и/или изменяется его длина) таким образом, чтобы его острие легло на снесенную ОЛОД
Опустив из точки К0 перпендикуляр на линию Кr, получим позицию M '3, соответствующую кратчайшему расстоянию между кораблями.
4. Определение момента, когда пеленг изменяется на заданную величину q.
Для решения этой задачи нужно отложить от начального пеленга заданный угол q и провести прямую до пересечения с линией Кr. В точке пересечения М '4 и будет находиться позиция, пеленг из которой на объект маневра равен (П0 + q).
5. Определение дистанции и времени, когда один из кораблей пересечет курс другого.
Проведя из точки К0 линии курсов Км и Кк до пересечения с линией Кr, найдем позицию М '5, в которой корабль М пересечет курс корабля К на расстоянии К0М '5 и позицию М '8, в которой корабль К пересечет курс корабля М по корме на расстоянии К0М '8.
6. Расчет позиции маневрирующего корабля, в которой он будет находиться на заданном курсовом угле qкз относительно объекта маневра.
Отложив от вектора скорости объекта маневра заданный курсовой угол qкз, проведем линию до пересечения с линией относительного курса Кr и получим позицию М '6, соответствующую поставленному условию.
7. Расчет позиции, в которой курсовой угол на объект маневра равен заданной величине qмз.
Через позицию К0 проведем прямую под углом Км + qм ± 180° к меридиану. В пересечении этой линии с относительным курсом Кr находим позицию М '7, соответствующую заданному условию. Время маневра для любой из перечисленных задач легко определить, разделив соответствующий отрезок перемещения Sr на относительную скорость, то есть t = Sr / Vr.
Чтобы определить взаимное положение кораблей через заданный промежуток времени, необходимо рассчитать относительное перемещение корабля за это время Sr = Vrt нанести относительную позицию и снять необходимые элементы позиции.
Предвычисление взаимного положения можно производить с помощью элементов маневрирования, пользуясь формулами (4.21).
4.7 Определение элементов движения цели и оценка точности их определения
4.7.1 Общие положения
Целью называют любой корабль или объект, обнаруженный в море визуально или с помощью технических средств.
Для правильной оценки обстановки и принятия решения на применение оружия, уклонение от противника или расхождение необходимо знать кроме координат обнаруженной цели ее курс и скорость.
Для определения элементов движения цели (ЭДЦ) необходимо знать минимум четыре параметра, являющиеся функцией координат и вектора скорости цели. Такими параметрами могут быть два пеленга и две дистанции, четыре пеленга и т. п., взятые при определенных условиях.
На кораблях курс и скорость цели можно автоматически определить с помощью специальных приборов или графическим способом вручную. Наиболее распространенным, дающим достаточно надежные результаты является графический способ определения ЭДЦ по пеленгам и дистанциям.
4.7.2 Определение ЭДЦ на навигационной карте
Способ заключается в нанесении на карту мест цели, по которым находят ее курс и скорость. На карте на момент измерения пеленга на цель и дистанции до нее записывается время и наносится счислимое место своего корабля К0 (рис. 4.6). Из счислимого места по пеленгу обнаружения П0 и дистанции D0 наносится место цели (точка М0).
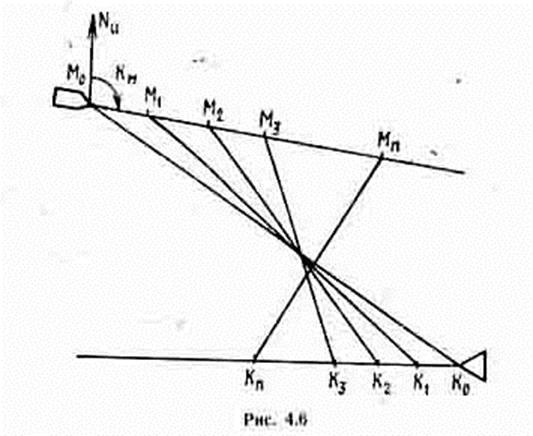
Очередные измерения пеленга и дистанции позволяют определить последующие места цели М1, М2, М3 и т.д. на момент времени T1, Т2, Т3 и т. д. Соединив точки М0, М1, М2 . Мn, получим прямую М0Мn, которая представляет собой перемещение Sм цели за время наблюдений t = Тn - Т0. Направление этой линии относительно северной части линии истинного меридиана есть курс цели. Скорость цели определяется по формуле Vм = Sм / t.
К достоинствам такого способа определения можно отнести наглядность перемещения кораблей относительно друг друга и относительно навигационной обстановки, возможность оценки изменения тактических условий в результате выполнения маневра относительно цели, к недостаткам-трудоемкость.
4.7.3 Определение ЭДЦ на маневренном планшете
Сущность способа заключается в нанесении на планшет относительных позиций по измеренным пеленгам на цель и дистанциям до нее и в последовательном решении треугольников позиций и скоростей.
На маневренном планшете задачу удобнее решать, принимая неподвижным в центре планшета свой корабль. В данном случае он является объектом маневра и обозначается К.
Для построения треугольника позиций по измеренным пеленгам П0, П1, . Пn и дистанциям D0, D1 , . Dn (рис. 4.7) наносятся относительные позиции маневрирующего корабля (цели) М0, М '1, …, М 'n и соединяются прямой линией. Вектор M0M 'n представляет собой вектор относительного перемещения цели Sr.
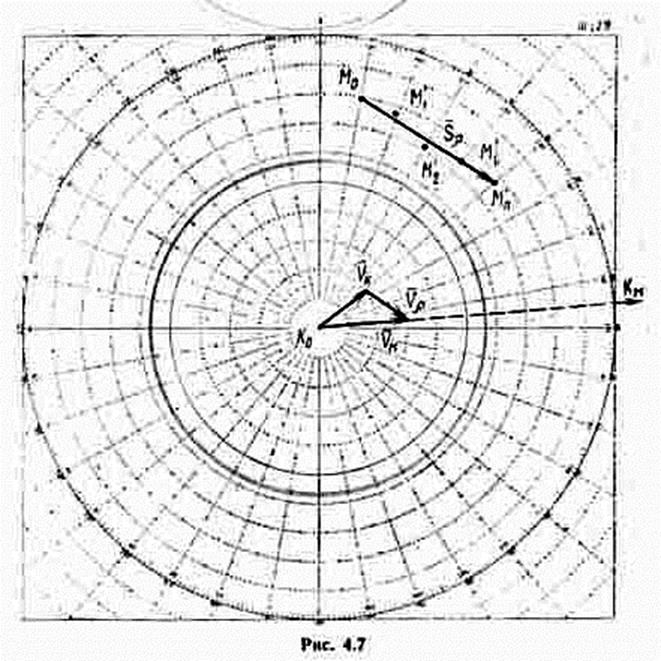
Для определения курса и скорости цели при точке К0 строится треугольник скоростей. По курсу объекта маневра (своего корабля) Кк откладывается вектор скорости Vк и из его конца параллельно вектору Sr и в том же направлении проводится вектор Vr, величина которого определяется по формуле
где t - промежуток времени между первым и последним замерами.
Направление вектора Vм, соединяющего центр планшета с концом вектора Vr, снимается с внешней шкалы маневренного планшета и является искомым курсом цели Км. Скорость цели определяется по длине вектора Vм (с учетом масштаба построений треугольника скоростей).
Точность курса и скорости цели, определяемых графически по двум или более замерам пеленгов и дистанций, зависит от точности измерения пеленгов и дистанций и точности графических построений.
Ошибки измерений зависят от технических характеристик средства, с помощью которого производятся измерения, а также от практических навыков оператора. Точность измерения пеленгов и дистанций каждым техническим средством рассчитывают для каждого оператора по результатам тренировок.
Ошибки графики зависят от масштаба карты (маневренного планшета) и точности графических построений.
При расчете ЭДЦ графическим способом на маневренном планшете эти ошибки, как показывают практические исследования, находятся в пределах: mП. граф = 0,1° ÷ 0,3°; mD граф = 0,2÷ 0,4 каб.
Одновременное изменение направления на объект маневра и дистанции до него является наиболее общей задачей тактического маневрирования. Большинство других задач на изменение позиции сводится к частным случаям этой общей задачи.
Чтобы рассчитать маневр, необходимо знать элементы движения объекта маневра Кк и Vк а также элементы позиции маневрирующего корабля П0, D0 на момент начала выполнения маневра. Предположим, что в заданный момент времени T0 маневрирующий корабль находится относительно объекта маневра по пеленгу П0 в дистанции D0 (рис. 4.8). Объект маневра следует курсом Кк и скоростью Vк.
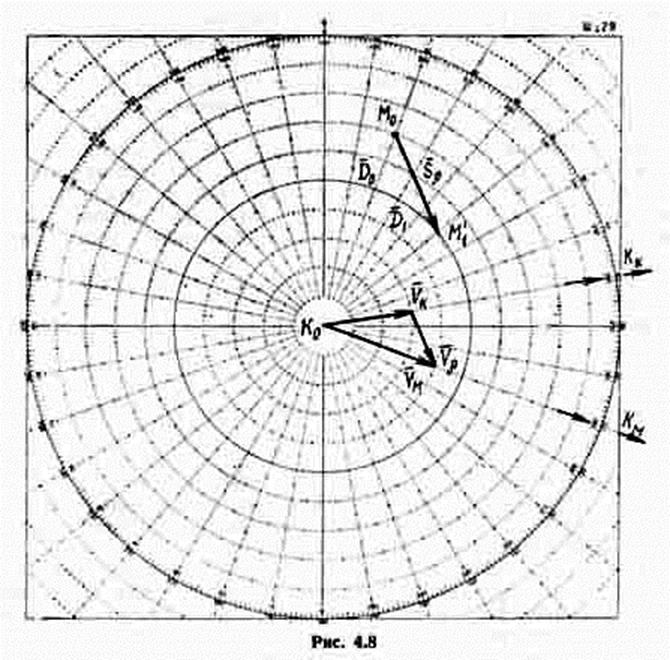
Для выполнения поставленной задачи маневрирующему кораблю необходимо изменить и направление, и дистанцию, то есть занять новую позицию М '1 по пеленгу П1 и на дистанции D1 . В общем случае данная задача имеет множество решений, но чаще всего производится расчет курса для изменения позиции при назначенной скорости хода. Эта скорость назначается исходя из возможностей энергетической установки, поставленной задачи, гидрологических условий.
Решение задачи начинается с построения треугольника позиций. Считая, что объект маневра К находится в центре планшета, по пеленгу П0 и на дистанции D0 от него наносят начальную позицию М0 маневрирующего корабля, по заданным П1 и D1 - относительную позицию M '1. Вектор М0М '1 является вектором относительного перемещения Sr. Для определения курса маневрирующего корабля строится треугольник скоростей. Из центра планшета K0 откладывается вектор Vк, а из его конца параллельно вектору Sr и в том же направлении проводится линия относительного курса Kr до пересечения с окружностью планшета, соответствующей заданной скорости маневрирующего корабля Vм. В точке пересечения сходятся концы векторов Vм (начало в центре планшета) и Vr (начало в конце вектора Vк). направление вектора Vм, снятое с внешней шкалы маневренного планшета, дает искомый курс маневрирующего корабля Км для изменения позиции. Если при построении треугольника скоростей линия относительного курса пересекает окружность, соответствующую Vм в двух точках, то это значит, что маневр заданной скоростью выполним двумя курсами. Из двух решений выбирается то, которое удовлетворяет требованиям поставленной задачи.
Чтобы найти время маневра, нужно, исходя из масштабов построений, определить величину относительного перемещения Sr, величину относительной скорости Vr и рассчитать время маневра t = Sr /Vr.
4.8.2 Изменение дистанции при постоянстве пеленга
Маневр изменения дистанции применяется в том случае, когда направление на объект маневра уже удовлетворяет поставленной задаче. Эта задача решается как частный случай рассмотренной выше задачи изменения позиции.
При построении треугольника позиций относительная позиция М '1 (рис. 4.9) будет находиться на линии начального пеленга на заданной дистанции D3 от объекта маневра, то есть линия относительного перемещения совпадает с линией начального пеленга. Поэтому треугольник позиций представляет собой прямую линию К0М0М '1.
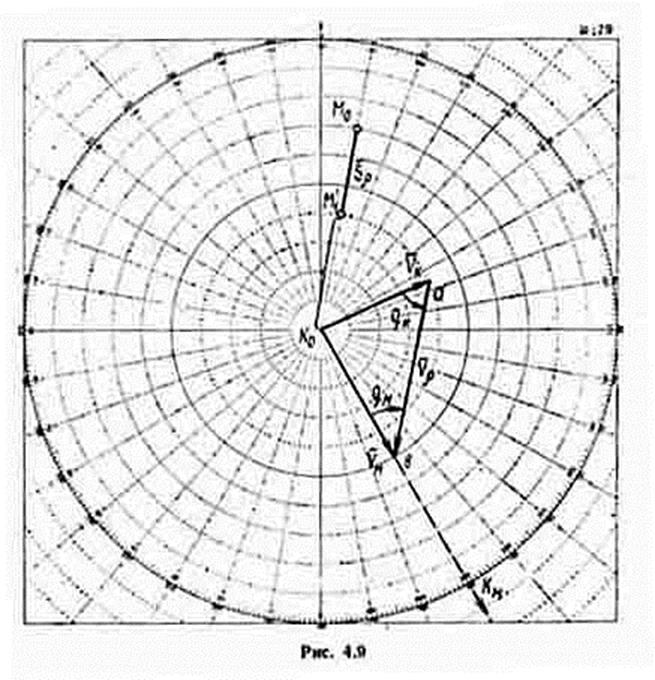
Решение скоростного треугольника для определения курса маневрирующего корабля при заданной скорости осуществляется так же, как и при решении задачи на изменение позиции (см. рис. 4.8). Время выполнения маневра определяется отношением t = (D0 - D3) / Vr.
Из треугольника скоростей следует, что
Если при постоянстве пеленга происходит сближение кораблей, то правая и левая части (4.24) будут иметь противоположные знаки (корабли маневрируют разноименными бортами). Тогда ОБП = БПм + БПк = 0, то есть, сближаясь при постоянстве пеленга, корабли М и К придут в точку пересечения линий их курсов одновременно. В связи с этим, обнаружив, что пеленг на приближающийся корабль не меняется, во избежание столкновения необходимо нарушить равенство боковых перемещений изменением курса или скорости своего корабля.
Рассмотренный маневр изменения дистанции без изменения пеленга позволяет сделать следующие выводы:
- маневр изменения дистанции при постоянстве пеленга можно выполнить относительно объекта, курс и скорость которого неизвестны, для этого необходимо добиться равенства боковых перемещений;
- из выражения (4.25) вытекает возможность определения одного из элементов движения цели, когда известен другой:
Наиболее часто этот маневр применяется при выходе в атаку, особенно на малых дистанциях, когда необходимо сократить дистанцию и уточнить элементы движения цели, сохранив ее курсовой угол.
4.8.3 Изменение дистанции до цели курсом, равным или обратным начальному пеленгу на нее
При обнаружении цели на больших дистанциях, когда величина изменения пеленга мала, а элементы движения цели определить не представляется возможным, целесообразно применение маневра курсом, равным пеленгу обнаружения, для сокращения дистанции, или курсом, обратным пеленгу, для ее увеличения. Обоснование этого способа изменения дистанции вытекает из формулы (4.23). Действительно, независимо от элементов движения цели маневрирование на своем курсовом угле 0 или 180° ведет к максимальной скорости изменения расстояния между кораблями, так как второй член равенства (4.23) при qr = 0° (180°) приобретает максимальное значение.
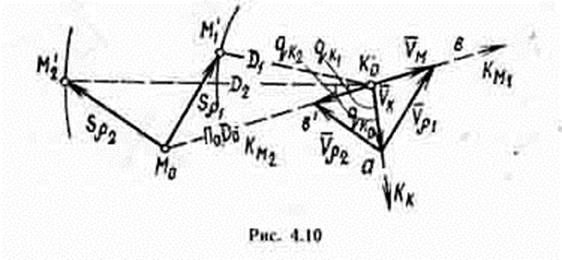
В процессе выполнения данного маневра всегда будет происходить увеличение курсового угла цели независимо от того, какая решается задача - сближение или расхождение с целью. Это наглядно представлено на рис. 4.10, где показан характер относительного перемещения корабля при сокращении и при увеличении дистанции. Если корабль для сокращения дистанции ляжет на курс Км1, равный начальному пеленгу на цель, то в соответствии с треугольником скоростей К0аb сближение на заданную дистанцию произойдет в позиции М '1 на курсовом угле цели qк1 > qк0. Если тому же кораблю необходимо оторваться от цели, то курсом Км2 (треугольник скоростей К0аb') он выйдет на заданную дистанцию D2 в позиции М '2 на курсовой угол цели qк2 > qк0.
10. Принимается решение по выбору маневра расхождения.

Рис. 13.14. Построение треугольника скоростей
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.

Рис. 13.15. Расчет маневра курсом
Маневр расхождения скоростью.
1. Необходимо на ЛОД нанести упреждающую точку У – положение цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
5. Снижение скорости необходимо начинать заранее – до наступления момента У, с тем, чтобы в этот момент судно уже имело новую скорость.

Рис. 13.16. Маневр расхождения скоростью
Комбинированный маневр.
Комбинированный маневр включает в себя маневр расхождения с судами скоростью и курсом вместе. Процедуры маневра с 1-3 выполняются как в «маневр расхождения скоростью или курсом».

Рис. 13.17. Маневр расхождения скоростью и курсом
На рис 13.17 показан сектор возможных сочетаний скоростей и курсов, которые удовлетворяли решению задачи. Выбираем скорость и курс для выполнения маневра расхождения и задаем их судну.
Определение расстояния кратчайшего сближения.
перпендикуляр, проведенный из центра планшета к ЛОД определяет Дкр. Величину tкр находим, откладывая по ЛОД отрезки, равные V0 до Дкр.
Определение точки поворота на прежний курс.

Точка поворота на прежний курс определяется при пересечении ОЛОДа и ЛОДа (ЛОД проводится касательная к заданному кругу дистанции расхождения). До данной точки измеряется время поворота на прежний курс с помощью циркуля раствором взятым равный новой .
Читайте также: