
Чем робот отличается от компьютера
§ 25. Робототехника. Системы автоматического управления
Во все времена люди пытались представить себе будущее. Писатели-фантасты рассказывали об удивительных городах, машинах, летательных аппаратах и роботах. Подумайте, что такое робот. Что он может делать? Как использование роботов может изменить жизнь людей? Что представляет себе человек, когда звучит слово «робот»?
В современном мире использование роботов стало обыденным явлением. По квартирам ползают роботы-пылесосы. На автомобилях и самолётах автопилоты-роботы ведут управление по круиз-контролю. Готовят пищу роботы-хлебопечки и роботы-мультиварки.
Что такое робот? Какие роботы бывают? Как ими управлять и как создать робота самому? В какой момент наши добрые помощники – пылесос, автомобиль, кофеварка – так поумнели, что превратились из просто агрегатов в наших интеллектуальных друзей? Чем отличается робот от неробота?
Рассмотрим в качестве примера обычную радиоуправляемую машинку (рис. 1). Она не является роботом, так как сможет поехать вперёд-назад и в сторону только после того, как на пульте нажмут рычажок в нужную сторону. Хотя команды движения и приходят на машинку по радиоканалу, но машинка не анализирует ситуацию и не принимает никаких решений.

Рис. 1. Радиоуправляемая машинка
Если рассмотреть управляемый с подобного пульта и тоже по радио каналу квадрокоптер, то его можно считать полноценным роботом (рис. 2). Это связано с тем, что на борту квадрокоптера стоит специальное устройство – чип-микропроцессор , в нём по заранее разработанной и за груженной в запоминающее устройство программе идёт анализ полученных команд, учитывается направление и скорость ветра, появление препятствия, рассчитываются изменения скорости вращения моторов.

Рис. 2. Радиоуправляемый квадрокоптер
Подумаем, когда становится роботом пылесос. Обычный включённый пылесос (рис. 3, а) будет долго шуметь, стоя на одном месте, если его никто никуда не передвинет. Но робот-пылесос в виде таблетки (рис. 3, б) сам передвигается от одной стены комнаты до другой, причём таким образом, что проходит над каждым участком пола не более чем 2 – 3 раза. Как это он делает? Откуда робот-пылесос берёт координаты и как запоминает свой путь?


Рис.3. Пылесос: а - обыкновенный; б - робот-пылесос
Оказывается, что, как и в случае с квадрокоптером, в роботе-пылесосе есть специальные датчики. Они установлены на колёсах, и они называются энкодерами. Эти датчики собирают информацию о движении пылесоса относительно препятствий в комнате. Полученная таким образом информация обрабатывается специальным устройством – центральным процессором пылесоса, в который заложена программа анализа передвижения пылесоса. Робот ползёт и как будто мысленно «закрашивает» часть комнаты, где он уже побывал, а далее, уперевшись в стенку и развернувшись, он прокладывает маршрут по ещё «не закрашенному» пути. И так продолжается до тех пор, пока он не «закрасит» своим следом все свободное пространство либо пока не кончится заряд батареи на его борту.
Итак, робот (чеш. robot, от robota – «подневольный труд») – это такое устройство, которое способно действовать по заложенной в него программе. Слово « робот » было придумано чешским писателем Карелом Чапеком и его братом Йозефом и впервые использовано в пьесе Чапека « Р. У. Р .» («Россумские универсальные роботы», 1920).
Вот как сам Карел Чапек это описывает: – «…в один прекрасный день … автору пришёл в голову сюжет … пьесы. И пока железо было горячо, он прибежал с новой идеей к своему брату Йозефу, художнику, который в это время стоял у мольберта… Автор изложил сюжет так коротко, как только мог…
– „Но я не знаю, – сказал автор, – как мне этих искусственных рабочих назвать. Я бы назвал их лаборжи [по-видимому, от английского слова labour – работники, трудящиеся, рабочая сила ], но мне кажется, что это слишком книжно“.
– „Так назови их роботами “, – пробормотал художник, … продолжая грунтовать холст …».
В ранних русских переводах использовалось слово « работарь ».
Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. Внешний вид роботов также может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи.
Настоящий робот – это машина, которую можно обучить, т. е. подобно компьютеру запрограммировать (задать ему набор действий, которые он должен выполнять) делать разнообразные виды движений, реагировать на изменения в окружающем мире и выполнять множество видов работ и заданий.
Все роботы можно разделить на две большие группы:
• стационарные роботы на фундаменте, которые обычно используются в промышленности, на линиях сборки и сварки кузовных деталей автомобилей;
• мобильные роботы, которые могут перемещаться и выполнять работу везде, куда смогут добраться.
Мобильные роботы различаются по способу передвижения: есть передвигающиеся на колёсах или гусеницах, шагающие, плавающие и летающие.
Роботы могут выполнять различные функции.
Промышленные роботы – это, как правило, мощные роботы-манипуляторы, установленные на неподвижном фундаменте, они способны выполнять действия в радиусе, равном длине их «руки». На конвейере их ставят несколько в ряд, и каждый выполняет определённые операции (рис. 4).

Рис. 4. Сборочная линия с промышленными роботами
Медицинские роботы используются для выполнения хирургических операций, при этом применяются системы дистанционного слежения (рис. 5).
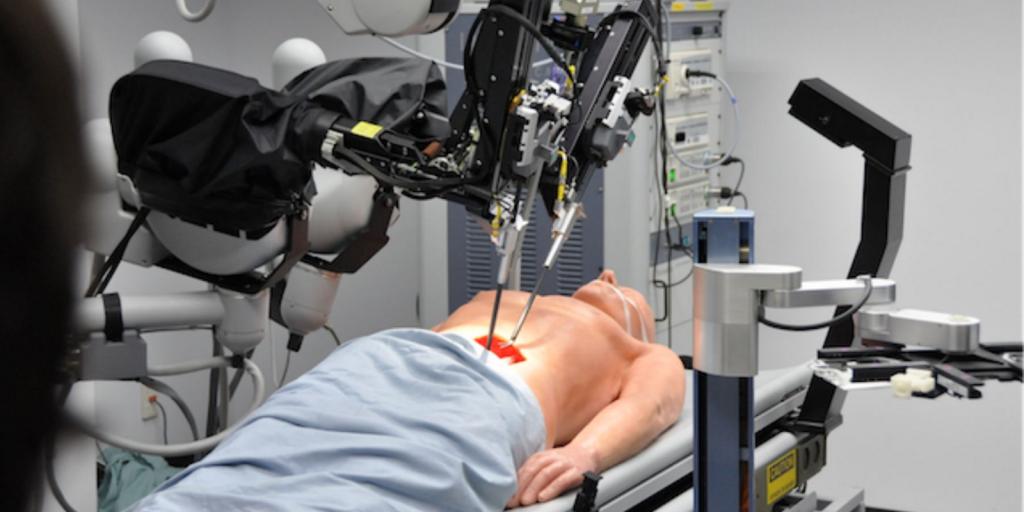
Рис. 5. Использование медицинских роботов в хирургии
К медицинским роботам относятся экзоскелеты, которые помогают людям передвигаться (рис. 6).

Рис. 6. Люди, использующие экзоскелеты
Роботы могут быть использованы в качестве протезов рук. Управлять электронными мышцами возможно уже сейчас, снимая датчиками сигналы с мышц человеческого тела. Наука, занимающаяся подобными проблемами, называется бионика.
Сельскохозяйственные роботы используются в растениеводстве и животноводстве (рис. 7). Они помогают кормить животных, удобрять и поливать растения, возделывать почву.

Рис. 7. Роботы, используемые в растениеводстве
Подводные роботы используются в морском деле для проведения аварийно-спасательных работ и различных исследований на дне моря (рис. 8).

Рис. 8. Подводный робот
Работа таких роботов осложняется тем, что ими невозможно управлять дистанционно, по радиоканалу. Радиоволны очень плохо распространяются в водной среде, поэтому таких автономных роботов надо заранее тщательно программировать, чтобы они смогли выполнить поставленную задачу и вернуться на базу самостоятельно.
Первым космическим роботом можно считать луноход, отправленный на Луну ещё во времена СССР — в далёком 1970 году (рис. 9)
Рис. 9. Советский луноход
В 2011 году американцами к Марсу был направлен робот «Кьюриосити» (рис. 10), название которого переводится на русский язык как «любознательность». Для него была разработана специальная платформа на реактивных двигателях, которая, подлетев к поверхности Марса, «зависла» над ней, и марсоход очень бережно на лебёдке сам спустился с неё на поверхность.
Рис. 10. Американский марсоход «Кьюриосити»
Робот был отправлен и к комете Чурюмова — Герасименко. Он проводил исследования поверхности в точке высадки, брал пробы грунта и анализировал их прямо на месте, передавая на Землю в цифровом виде данные о составе почвы и поверхности, на которой он работал.
Сервисные роботы помогают нам в повседневной жизни. К ним, например, относится робот-пылесос. В местах большого скопления людей используют роботы телеприсутствия (рис. 11), которые помогают сориентироваться, подсказывают, куда сейчас стоит сходить, и отвечают на вопросы посетителей.
Рис. 11. Робот телеприсутствия
В школе такие роботы телеприсутствия помогут ребятам, которые не пришли в школу, почувствовать себя в коллективе, побродить на переменке по коридорам, пообщаться с друзьями, получить задания на дом или пойти с одноклассниками в музей (рис. 12).

Рис. 12. Робот в музее
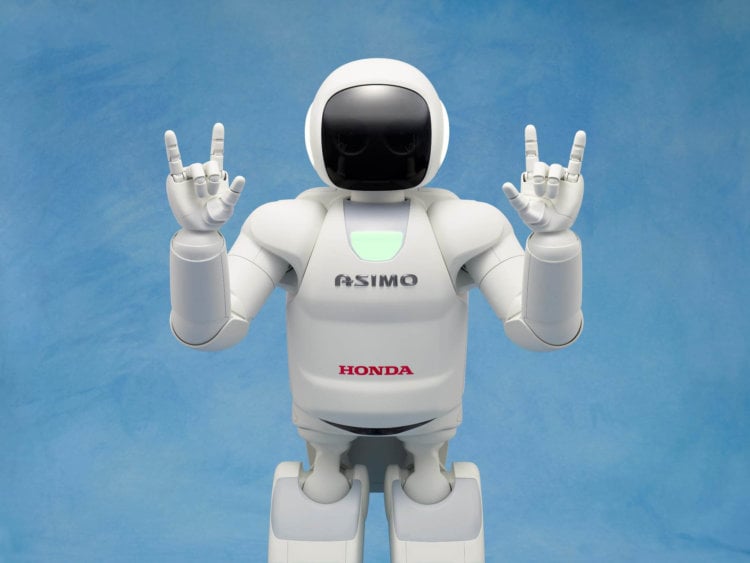
Самым известным шагающим сервисным роботом является японский робот Асимо (рис. 13). Такие роботы уже используются в некоторых кафе как разносчики заказанной еды.
Рис. 13. Японский робот Асимо
К сервисным роботам можно отнести систему круиз-контроля в автомобилях. Причём если раньше такие системы только поддерживали определённую скорость при движении по трассе, то сейчас появились значительно более умные системы круиз-контроля, которые определяют ещё и расстояние до идущего впереди автомобиля и позволяют двигаться со скоростью, задаваемой лидером в колонне.
В роботе, как и в любом компьютере, есть центральный процессор (чип), постоянная память и оперативная память. Центральный процессор – это «мозг» компьютера, устройство для обработки информации. Постоянная память, или постоянное запоминающее устройство (ПЗУ) , используется для хранения неизменяемых данных в компьютере. Она способна хранить данные даже тогда, когда нет энергопитания компьютера. Оперативная память, или оперативное запоминающее устройство (ОЗУ ), – это та часть компьютерной памяти, в которой во время работы компьютера хранится выполняемая программа и все данные, обрабатываемые процессором. ОЗУ – это энергозависимая часть компьютерной памяти.
Программу в робот загружают. Способы загрузки бывают разные, например с помощью специального устройства – программатора – или по радиоканалу. Загрузка программы в постоянную память устройства ещё называется прошивкой устройства.
Когда робот выключен, загруженная в него программа хранится в ПЗУ. Как только на робот подаётся питание, процессор отправляет программу из постоянной в оперативную память и запускает выполнение программы.
Таким образом, роботом называют такое устройство, которое можно запрограммировать на выполнение каких-то действий.
Роботом можно считать современный гугл-автомобиль , на который уже установлен бортовой вычислительный комплекс и активный круиз-контроль. Такой автомобиль может не только сохранять постоянную скорость на трассе, но и оставлять неизменным расстояние до впереди идущего автомобиля и реагировать в автоматическом режиме на внезапно появляющееся препятствие.
Теперь мы можем определить, чем же отличаются роботы от простых механических устройств или радиоуправляемых игрушек. Итак, в роботах должно быть устройство, которое позволит ему «думать» и каким-то образом «общаться» с человеком. Такое устройство, которое используется для управления в электронике и вычислительной технике, получило название «контроллер». Контроллер – это микросхема, внутри которой находится настоящий компьютер (рис. 14). В контроллере есть всё, что необходимо для самостоятельной работы: процессор, оперативная и постоянная память, порты ввода и вывода, таймеры, многое другое.

Рис. 14. Контроллер
Во все планшеты, телефоны и другие гаджеты встроены контроллеры. Контроллеры отличаются друг от друга размерами, мощностью (которая определяет, какое количество операций может выполняться), рабочей частотой (скоростью выполнения операций).
Главная часть любого контроллера – микропроцессор.
Рис. 15. Микропроцессоры
Это арифметико-логическое устройство, которое производит арифметические и логические операции с двоичными числами (об этом мы будем говорить, когда станем рассматривать команды, которые понимают роботы).
Электроника в робототехнике
Приведите примеры электронных устройств, которыми вы пользуетесь в школе и дома. Как вы думаете, нужна ли для их работы электрическая энергия? Обоснуйте свой ответ.
Рассмотрим самую главную часть любого робота – контроллер.
В качестве индикаторного устройства в современных устройствах часто применяются светодиоды. Светодиод – это электронный прибор, который начинает светиться при прохождении через него электрического тока. Светодиод излучает свет, когда ток протекает от анода, который обозначен знаком «+» (это длинный вывод светодиода), к катоду, который обозначен знаком «–» (короткий вывод). Светодиод обязательно нужно подключать к источнику питания с соблюдением полярности, т. е. «+» светодиода – к «+» источника тока, а «–» светодиода – к «–» источника тока. Раньше светодиоды выпускали только красного и зелёного цветов, затем придумали, как изготавливать светодиоды жёлтого цвета. Но только когда японец Судзи Накамура изобрёл синий светодиод, стало возможно добиться свечения любым цветом.
Основной частью контроллера является микропроцессор . Приставка микро, как вы знаете, означает «маленький».
Рис. 16. Принципиальная схема простейшего процессора
Сейчас процессор такой маленький, что даже в керамическом корпусе имеет размер, сравнимый с размером рисового зёрнышка, несмотря на то, что он состоит из огромного количества электронных компонентов. Принципиальная схема простейшего процессора имеет приблизительно такой вид, как показано на рисунке 16, а он умещается на кончике пальца (рис. 17).
Рис. 17. Микропроцессор и рисовое зернышко
Но процессоры не всегда были маленьких размеров.
Раньше вычислительные машины, выполняющие такие же операции, как микропроцессор, были огромного размера и занимали целый зал (рис. 18).

Рис. 18. Вычислительная машина второй половины XX в.
Основные понятия и термины:
роботы: стационарные, мобильные, промышленные, медицинские, подводные, сельскохозяйственные, космические, сервисные, шагающие, круиз-контроль; микропроцессор, постоянная память, оперативная память, контроллер.
? Вопросы и задания
1. Объясните, чем робот отличается от неробота. Верно ли, что радиоуправляемые игрушки – это настоящие роботы?
2. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
3. Какую систему классификации вы можете предложить для роботов?
4. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия (шагающих, стационарных, мобильных)?
5. Какими должны быть подводные роботы: программно управляемыми (автономными) или дистанционно управляемыми? Почему?
6. Что можно считать первым космическим роботом? Какие ещё космические роботы вам известны?
Придумайте и нарисуйте собственного робота. Дайте роботу имя, придумайте, что он будет делать, какие команды он сможет выполнять.
Компьютер - это стационарная электронно-вычислительная машина (традиционный компьютер). С помощью компьютера и прилагающихся устройств можно выполнять математические операции, а также ввод данных разного типа. Это требует присутствие оператора. Основные внутренние элементы компьютера: процессор, материнская плата; жёсткие диски (там можно разместить много информации); дисководы для компакт-дисков; дисковод для дискеты; вентилятор; постоянное запоминающее устройство; оперативная память; видеокарта; звуковая карта. Для работы с компьютером обязательно требуются: монитор, клавиатура, компьютерная мышка.
Робот - это передвижное устройство с программным управлением. Робот содержит: процессор, плату управления (контроллер); датчики; сигнализацию (звуковая и световая); механизмы передвижения с приводами; хранилище информации с алгоритмами действий; пульт управления; аккумулятор. Человек управляет роботом с помощью пульта управления. При этом робот самостоятельно выполняет алгоритм действий. Как видно из описания, у компьютера и робота разные операции, разная структура и разный способ управления. Плата управления в роботе имеет иной состав, чем материнская плата компьютера. Роботы, связанные с интернетом, управляются от компьютеров. Пример компьютера с аккумулятором - ноутбук.
Компьютер это составная часть робота. Правда понятие "робот" не имеет конкретного определения. Роботами зовут все что угодно, от заводной игрушки, кроме механического аккумулятора и мультипликатора ничего внутри не содержащего, до программы не имеющей ни одной механической части В последнее время, роботами модно звать дистанционно управляемые машины, достаточно сложные, но в автономном режиме, без управления человеком, не работающие.



Компьютер несомненно из семейства роботов. А отличие в том что роботы выполняют более весомую работу.
Надеюсь я вам помог!
Скорее нет, чем да. Слово "робот" придумал чешский писатель Карел Чапек и в переводе оно означает "труд" т.е. созвучно русскому слову работа. По сути робот - это автомат, выполняющий определенную механическую работу, и заменяющий человеческий труд. Компьютер в переводе с английского означает "вычислитель", то есть устройство способное производить математические операции. Так что роботом компьютер назвать нельзя, области применения разные.
Скорее даже не компьютер, а электронно-вычислительное устройство, процессор, который является, условного говоря, "мозгом" робота.
>Слово "робот". в переводе оно означает "труд"
И кто вам такую фигню сказал? С какого языка перевод? По-чешски "труд" "праце".
Во все времена люди пытались представить себе будущее. Писатели-фантасты рассказывали об удивительных городах, машинах, летательных аппаратах и роботах. Подумайте, что такое робот. Что он может делать? Как использование роботов может изменить жизнь людей?
В современном мире использование роботов стало обыденным явлением. По квартирам ползают роботы-пылесосы. На автомобилях и самолётах автопилоты-роботы ведут управление по круиз-контролю. Готовят пищу роботы-хлебопечки и роботы-мультиварки.
Что такое робот? Какие роботы бывают? Как ими управлять и как создать робота самому? В какой момент наши добрые помощники — пылесос, автомобиль, кофеварка — так поумнели, что превратились из просто агрегатов в наших интеллектуальных друзей? Чем отличается робот от неробота?
Рассмотрим в качестве примера обычную радиоуправляемую машинку (рис. 10.17).
Она не является роботом, так как сможет поехать вперёд-назад и в сторону только после того, как на пульте нажмут рычажок в нужную сторону. Хотя команды движения и приходят на машинку по радиоканалу, но машинка не анализирует ситуацию и не принимает никаких решений.
Если рассмотреть управляемый с подобного пульта и тоже по радиоканалу квадрокоптер, то его можно считать полноценным роботом (рис. 10.18).
Это связано с тем, что на борту квадрокоптера стоит специальное устройство — чип-микропроцессор, в нём по заранее разработанной и загруженной в запоминающее устройство программе идёт анализ полученных команд, учитывается направление и скорость ветра, появление препятствия, рассчитываются изменения скорости вращения моторов.
Подумаем, когда становится роботом пылесос. Обычный включённый пылесос (рис. 10.19) будет долго шуметь, стоя на одном месте, если его никто никуда не передвинет. Но робот-пылесос в виде таблетки (рис. 10.20) сам передвигается от одной стены комнаты до другой, причём таким образом, что проходит над каждым участком пола не более чем 2—3 раза. Как это он делает? Откуда робот-пылесос берёт координаты и как запоминает свой путь?
Оказывается, что, как и в случае с квадрокоптером, в роботе-пылесосе есть специальные датчики. Они установлены на колёсах, и они называются энкодерами. Эти датчики собирают информацию о движении пылесоса относительно препятствий в комнате. Полученная таким образом информация обрабатывается специальным устройством — центральным процессором пылесоса, в который заложена программа анализа передвижения пылесоса. Робот ползёт и как будто мысленно «закрашивает» часть комнаты, где он уже побывал, а далее, уперевшись в стенку и развернувшись, он прокладывает маршрут по ещё «не закрашенному» пути. И так продолжается до тех пор, пока он не «закрасит» своим следом все свободное пространство либо пока не кончится заряд батареи на его борту.
Итак, робот — это такое устройство, которое способно действовать по заложенной в него программе.
В роботе, как и в любом компьютере, есть центральный процессор (чип), постоянная память и оперативная память. Центральный процессор — это «мозг» компьютера, устройство для обработки информации. Постоянная память, или постоянное запоминающее устройство (ПЗУ), используется для хранения неизменяемых данных в компьютере. Она способна хранить данные даже тогда, когда нет энергопитания компьютера. Оперативная память, или оперативное запоминающее устройство (ОЗУ), — это та часть компьютерной памяти, в которой во время работы компьютера хранится выполняемая программа и все данные, обрабатываемые процессором. ОЗУ — это энергозависимая часть компьютерной памяти.
Программу в робот загружают. Способы загрузки бывают разные, например с помощью специального устройства — программатора — или по радиоканалу. Загрузка программы в постоянную память устройства ещё называется прошивкой устройства.
Когда робот выключен, загруженная в него программа хранится в ПЗУ. Как только на робот подаётся питание, процессор отправляет программу из постоянной в оперативную память и запускает выполнение программы.
Таким образом, роботом называют такое устройство, которое можно запрограммировать на выполнение каких- то действий.
Является ли роботом старый автомобиль, например «Волга» ГАЗ-21 (рис. 10.21)? Конечно, каждый ответит, что нет.
Роботом можно считать современный гугл-автомобиль (рис. 10.22), на который уже установлен бортовой вычислительный комплекс и активный круиз-контроль. Такой автомобиль может не только сохранять постоянную скорость на трассе, но и оставлять неизменным расстояние до впереди идущего автомобиля и реагировать в автоматическом режиме на внезапно появляющееся препятствие.
Теперь мы можем определить, чем же отличаются роботы от простых механических устройств или радиоуправляемых игрушек. Итак, в роботах должно быть устройство, которое позволит ему «думать» и каким-то образом «общаться» с человеком. Такое устройство, которое используется для управления в электронике и вычислительной технике, получило название «контроллер». Контроллер — это микросхема, внутри которой находится настоящий компьютер (рис. 10.23). В контроллере есть всё, что необходимо для самостоятельной работы: процессор, оперативная и постоянная память, порты ввода и вывода, таймеры, многое другое.
Во все планшеты, телефоны и другие гаджеты встроены контроллеры. Контроллеры отличаются друг от друга размерами, мощностью (которая определяет, какое количество операций может выполняться), рабочей частотой (скоростью выполнения операций).
Главная часть любого контроллера — микропроцессор. Это арифметико-логическое устройство, которое производит арифметические и логические операции с двоичными числами (об этом мы будем говорить, когда станем рассматривать команды, которые понимают роботы).
Микропроцессоры отличаются друг от друга внешним видом (корпусом и количеством ножек) и функциональными возможностями. Один и тот же процессор может быть в корпусе, который нужно припаивать к плате, а может — в корпусе, который просто вставят в специальный разъём на плате (рис. 10.24). Процессор может выполнять различные задачи: например, управлять освещением у вас в комнате: по хлопку в ладоши включать свет, а по свистку выключать.
В следующем параграфе вы продолжите знакомиться с принципами работы роботов.
Основные понятия и термины:
робот, микропроцессор, постоянная память, оперативная память, контроллер.
8. BigDog (Boston Dynamics)

На то, как передвигается этот робот, лучше посмотреть самостоятельно. Разработанный в 2005 году Boston Dynamics (недавно купленной Google) в качестве грузового мула для армии, BigDog представляет собой четырехногого робота, способного передвигаться по пересеченной местности вместе с солдатами. Его баланс и способность прыгать удивляют, а также придают ему жутковатый вид. Его ноги выглядят живыми, поскольку пытаются устоять, даже когда торс робота толкают.
BigDog в длину почти полтора метра, в высоту — около метра, весит 110 килограмм, но может перевозить до 150 килограммов со скоростью около 6 км/ч даже в горку. С помощью около 50 датчиков робот анализирует положение и скорость, отправляя информацию в центральный компьютер и определяя следующий маневр.
Недавно Boston Dynamics оснастило BigDog рукой, которая может поднимать и бросать объекты.
Вопросы и задания:
1. Объясните, чем робот отличается от неробота. Верно ли, что радиоуправляемые игрушки — это настоящие роботы?
2. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
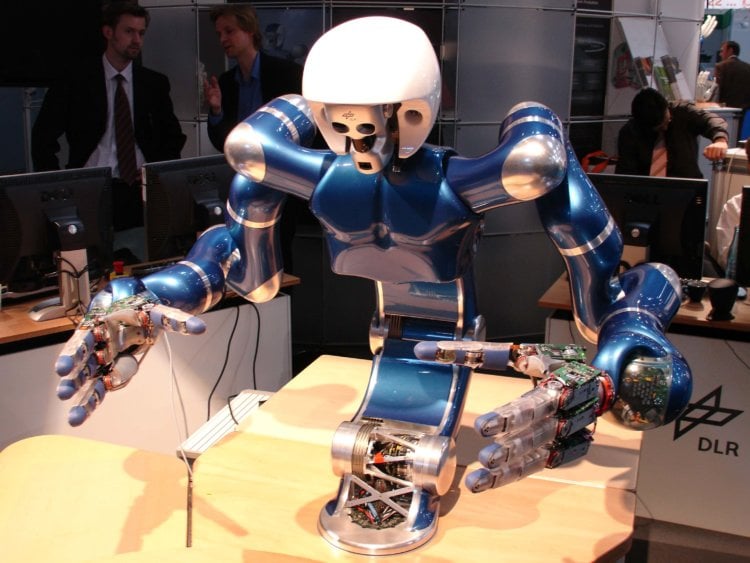
7. Roboy (Университет Цюриха)

Для начала отметим, что этого робота отличает от других его суставы, движимые сухожилиями, которые позволяют ему двигаться почти как человеку. Он мягкий на ощупь и очень реактивный, компенсирующий толчки и восстанавливающий свое положение с помощью имитации мышц. Его лицо может выражать эмоции, а еще он краснеет. Также это первый из двух роботов в этом списке, который выглядит как ребенок.
Представленный в Цюрихе в прошлом году, Roboy будет около метра высотой. Он небольшой, но создан так, чтобы в один прекрасный день стать хорошим помощником для пожилых людей, а также отличным компаньоном. Проект открыт, нужен только 3D-принтер и 200 000 евро, чтобы его распечатать.
К слову, понадобилось около девяти месяцев, чтобы его разработать, что символично.

1. iCub (Итальянский технологический институт)

Это iCub, самый впечатляющий робот-гуманоид из списка. iCub настолько похож на человека, что к нему можно обращаться по имени-отчеству. Разработанный несколькими университетами и созданный Итальянским технологическим институтом, iCub по размерам сопоставим с двухлетним ребенком и даже учится точно так же.
iCub способен идентифицировать людей и объекты, находить различия между ними и взаимодействовать соответственно. Он также способен находить выход из сложных трехмерных лабиринтов самостоятельно. Он может трогать, хватать и поднимать предметы по требованию и даже стрелять из лука, пытаясь попасть в яблочко все лучше и лучше.
Вполне вероятно, что именно iCub станет идеальным спутником и помощником человека в не слишком отдаленном будущем.
3. RoboBee (Гарвардский университет)

С искусственными мышцами, которые движут крылья 120 раз в секунду, RoboBee имеет размах крыльев около 3 см и легко взлетает. Вы можете спросить, зачем же нужен такой робот, но очень удивитесь, узнав о цели Гарвардского университета.
План состоит в том, чтобы создать автономный рой таких роботов для поисково-спасательных миссий, детального изучения погоды и искусственного опыления. С помощью сенсоров, которые будут работать в точности как антенны пчел, и специального программного обеспечения, роботы смогут сканировать движения друг друга и действовать соответственно. Размер роботов — это ключевая деталь, которая позволит им добираться до сложнодоступных зон в случае природных катастроф с легкостью и проворством.
В настоящее время инженеры работают над решением некоторых проблем самой сборки. Первая — это источник питания на борту, а вторая — уменьшение микрочипа, чтобы не мешал роботам летать. Как только проблемы будут преодолены, RoboBee будут готовы вылетать.
Остается еще один вопрос: сможем ли мы сами ускользнуть от взора этих мелких пчел?

Задание 1
Придумайте и нарисуйте собственного робота. Дайте роботу имя, придумайте, что он будет делать, какие команды он сможет выполнять.
Мобильные роботы
Манипуляторы весьма просто собрать и написать для них программу, поскольку они работают в ограниченном пространстве. Но все становится немного сложнее, если вы отправляете робота в мир.
Первое препятствие заключается в том, чтобы дать роботу рабочую систему передвижения. Если робот будет двигаться только по гладкой земле, колеса или гусеницы будут лучшим вариантом. Колеса или гусеницы также могут работать на грубой земле, если будут достаточно большими. Но чаще всего робототехники задумываются о ногах, поскольку их легче адаптировать. Строительство роботов с ногами также помогает ученым понимать естественное движение — полезное упражнение для биологов.
Прямохождение (ходьба на двух ногах) — довольно нестабильно, поэтому ему сложно научить роботов. Чтобы создать стабильного робота-ходока, конструкторы часто наблюдают за миром животных, особенно насекомых. Шестиногие насекомые обладают невероятно хорошим балансом и адаптируются к широкому набору местностей.
Вопреки распространенному мнению, роботы бывают не только в фильмах 50-х и коробках с игрушками. Минимум десять роботов уже можно назвать невероятными — и они находятся в производстве. От гуманоидов, способных выполнять широкий круг действий, недоступных людям, до протезов и гигантских роботов, которых мы могли встречать только в компьютерных играх и фильмах. Слово «робот» было придумано чешским драматургом Карелом Чапеком для пьесы «Россумские Универсальные Роботы», и с тех мы, можно сказать, повсюду говорим о его пьесе. Трансформеры, робокопы, прочие гиганты — все это тренд кинематографический, и от реальности его отделяет всего-то ничего.
Давайте о ней и поговорим.

Верьте или нет, реальность роботов создавалась на протяжении сотен лет. Планы, нарисованные Леонардо да Винчи в конце 15 века были обнаружены в 50-х годах ушедшего столетия. Маэстро подробно составил конструкцию механического рыцаря, который мог двигать руками, головой и челюстью. Нет никаких свидетельств того, что этот рыцарь когда-либо был построен, но чертежи точно знаменуют собой начало разработки роботов. Первый человекоподобный робот, управляемый дистанционно (и как ни странно, голосом), появился в 20-х годах, а первый электронный автономный робот со сложной системой — в 40-х. И уже в 50-х, 60-х и 70-х началась эволюция промышленных роботов для использования на заводах, поднимающих и сортирующих материалы.
Как вы можете себе представить, моральные последствия введения роботов в общество полны противоречий, хотя роботы стали жизненно важными инструментами для человечества — люди теряют рабочие места; этот печальный факт только усугубляется с развитием технологий. Есть также теория — которую Вернор Виндж назвал «сингулярностью» — благодаря которой людям стоит побеспокоиться о моменте, когда роботы станут умнее людей. Предполагалось, что первый роботизированный мозг появится к 2019 году, но как же вы удивитесь, когда пройдетесь по нашему списку десяти роботов, которых можно поместить в величайшие достижения человечества робототехники на сегодняшний день.
10. Asimo (Honda)

Начнем с робота, которого многие, вероятно, уже видели. Почти сорок лет его делала Honda. Разработка началась в 80-х годах с серии Honda E-Series, в 90-х появилась Honda P-Series. P-Series был первым гуманоидным роботом, который мог гулять без проводов.
Эти проекты были неотъемлемой частью эволюции Honda, которая привела к презентации Asimo в 2000 году. С некоторыми обновлениями, современная модель 2014 года ростом примерно в полтора метра весит около 50 кг. Она полностью способна маневрировать самостоятельно, избегать препятствий и даже может принести вам кофе по вашей просьбе.
Цель Honda — интегрировать в Asimo инструменты помощи людям. Со своим искусственным интеллектом, робот способен воспринимать просьбы человека и реагировать соответствующим образом. Датчики в его руках способны оценивать количество силы, необходимой для удерживания предмета: к примеру, Asimo может отвинтить плотно сидящую крышку от банки кофе или поднять бумажный стаканчик, не раздавив его.

Задание 2
Рассмотрите свой телефон, определите его марку. Найдите в Интернете, на базе какого микропроцессора он разработан.
Определите микропроцессоры, на базе которых разработаны телефоны ваших родителей, телефоны ближайших друзей. Заполните таблицу «Микропроцессоры телефонов».
Мы часто пишем о роботах. Их делают во всем мире. Иногда они совершенно не похожи на людей, иногда наоборот. Тем не менее многие из нас не имеют ни малейшего представления о том, как их делают, из чего, с какими проблемами сталкиваются инженеры и как их преодолеть. В этой статье мы подробно разберем, как устроены роботы и как они работают.
На самом базовом уровне люди состоят из пяти основных компонентов:
- структура тела;
- система мышц, которая движет телом;
- система органов чувств, которая получает информацию о теле и окружающей среде;
- источник энергии, питающий мышцы и органы чувств;
- мозговая система, которая обрабатывает информацию от органов чувств и дающая указания мышцам.
Конечно, у нас есть ряд нематериальных атрибутов вроде интеллекта и морали, но на чисто физическом уровне список выше включает это.
Роботы делаются из аналогичных компонентов. Обычный робот обладает подвижной физической структурой, электродвигателем определенного рода, системой сенсоров (датчиков, органов чувств), блоком питания и компьютерным «мозгом», который контролирует все эти элементы. По существу, роботы — это техногенные версии животной жизни. Это машины, которые копируют поведение людей и животных.
Джозеф Энгельбергер, пионер промышленной робототехники, однажды заметил: «Я не могу дать определение роботу, но я точно узнаю его, когда увижу». Если вы задумаетесь обо всех возможных машинах, которые люди называют роботами, вы поймете, что невозможно придумать всеобъемлющее определение. У каждого есть свое представление о том, что представляют собой роботы.

- R2D2 и C-3PO: умные говорящие роботы с ярко выраженной индивидуальностью из фильмов серии «Звездные войны»
- AIBO от Sony: собака-робот, которая обучается в процессе взаимодействия с людьми
- ASIMO от Honda: робот, который может ходить на двух ногах
- Промышленные роботы: автоматизированные машины, работающие на сборочных конвейерах
- Дейта: почти человекоподобный андроид из «Звездного пути»
- Роботы-саперы
- Марсоходы NASA
- HAL: бортовой компьютер из «Космической Одиссеи 2001 года» Стэнли Кубрика
- MindStorm: популярный роботизированный комплект от LEGO
Все вышеперечисленное можно назвать роботами. Роботом, как правило, называется то, что люди считают роботом. Большинство робототехников (людей, которые делают роботов) использует более точное определение. Они указывают, что роботы обладают перепрограммируемым мозгом (компьютером), который движет тело.
Согласно этому определению, роботы отличаются от других подвижных машин вроде автомобилей, поскольку у них есть компьютерный элемент. У большинства новых автомобилей есть бортовой компьютер, но в него можно внести не так много нового. Вы управляете большинством элементов в автомобиле непосредственно при помощи механических устройств разного рода. Роботы отличаются от обычных компьютеров по своей физической природе — у обычных компьютеров нет физического тела, они могут существовать и без него.
Роботизированный манипулятор

Термин «робот» пришел к нам от чешского слова «robota», что означает буквально «принудительный труд». В принципе, это слово отлично описывает большинство роботов. Чаще всего роботы делают тяжелую работу, монотонно трудятся на производстве. Также они решают задачи, которые сложны, опасны или скучны для людей.
Наиболее распространенный вид робота — это роботизированный манипулятор. Типичный манипулятор состоит из семи металлических сегментов, соединенных шестью суставами. Компьютер управляет роботом, вращая отдельные шаговые двигатели, подключенные к каждому суставу (некоторые крупные манипуляторы используют гидравлику или пневматику). В отличие от обычных двигателей, шаговые двигатели двигаются точными шажками. Это позволяет роботу перемещать руку очень точно, в точности повторяя одно и то же движение снова и снова. Робот использует датчики движения, чтобы убедиться, что совершает движения правильно.
Промышленный робот с шестью суставами напоминает человеческую руку — у него есть подобия плечу, локтю и запястью. Как правило, плечо установлено на неподвижной базовой структуре, а не на подвижном теле. У такого типа робота есть шесть степеней свободы, то есть он может поворачиваться в шести разных направлениях. Для сравнения, человеческая рука имеет семь степеней свободы.
Задача вашей руки — перемещаться с места на место. Аналогичным образом, задача манипулятора — перемещать концевой эффектор с места на место. Вы можете оснастить манипулятор разными концевыми эффекторами, предназначенными для конкретных задач. Один из распространенных эффекторов — упрощенная версия руки, которая может хватать и переносить разные объекты. Манипуляторы часто обладают встроенными датчиками давления, которые предписывают компьютеру, с какой силой захватывать конкретный объект. Это позволяет роботу не ломать все, что он хватает. Другие конечные эффекторы включают паяльные лампы, дрели и распылители порошка или краски.
Промышленные роботы предназначены для того, чтобы делать одни и те же вещи, в контролируемой среде, снова и снова. Например, робот может закручивать колпачки на тюбиках с зубной пастой. Чтобы научить робота делать это, программист описывает порядок движения, используя ручной контроллер. Робот записывает последовательность движений в память и делает это снова и снова, когда новый продукт поступает на конвейер.
Большинство промышленных роботов работает на конвейерах, собирая автомобили. Роботы делают это более эффективно, чем люди, поскольку более точны. Они всегда сверлят в одном и том же месте, затягивают болты с одной и той же силой, независимо от того, сколько часов проработали. Сборочные роботы также важны для компьютерной отрасли. Весьма сложно точно собрать крошечный микрочип силами человека.
5. Atlas (Boston Dynamics)

Вернемся к Boston Dynamics. Высота Atlas — 2 метра, вес — 150 кг. Он был разработан с единственной целью: заменить людей в поисково-спасательных операциях и для отправки в опасные зоны, в которых люди не смогут выжить. Благодаря сложным конечностям, робот может использовать электроинструменты, вращать вентили и так далее. Это создание — серьезный шаг к созданию человекоподобных роботов, которые подменят людей в особо опасных условиях, а потом и в более безопасных.
Atlas представляет собой сочетание человеческого управления и автономии, автономно контролирует баланс, но пока не понимает всех деталей человеческой миссии, как их может понять оператор. В случае поиска и спасения в труднодоступной местности, например, в разрушенных зданиях, это отличная команда.
Можно сказать прямо: баланс Atlas прекрасен, но не удивляет, поскольку мы уже знакомы с BigDog. В этом году Atlas будет испытан на DARPA Robotics Challenge в ходе решения отдельных задач, например, вождения и использования электроинструментов.

2. «Кьюриосити» (NASA)

Запущенный в ноябре 2011 года и приземлившийся на Марс в августе 2012 года, «Кьюриосити» представляет собой самый продвинутый марсоход от NASA на сегодняшний день. 3 метра в длину и 2,5 в высоту, весом почти под тонну, марсоход выделяется на жестком рельефе Красной планеты. Его основная миссия заключается в анализе геологии, поиске воды или признаков жизни, а также изучении климата. «Кьюриосити» уже подтвердил наличие воды в почве Марса, что вызвало большое волнение и сплетни среди астрономов.
«Кьюриосити» оснащен системой визуализации, способной делать снимки в высоком разрешении на поверхности Марса, и тем самым помогает земной команде в удаленном изучении Марса. Камеры, установленные на марсоходе, помогли сделать знаменитый «селфи» марсохода. Также он может немного бурить породу и собрать образцы в поисках элементов, которые являются ключом к жизни на Земле. Ни один из его предшественников не был способен на это.
Кроме того, это первый робот в списке, оснащенный лазером. «Кьюриосити» может сжигать лазером небольшие камешки, анализируя испарения.

9. VGo — роботизированное устройство телеприсутствия

VGo попало в этот список не только из-за футуристического вида или особых достижений в области технологий, но и за особую изобретательность. Когда VGo размещается в классной комнате, лекционном зале или где-нибудь еще, пользователь может получить к нему полный контроль с помощью ноутбука через Wi-Fi.
Технологии этого робота позволяют не только говорить, видеть и слышать, но и передвигаться. Это куда любопытнее, чем простой звонок в Skype, когда человек должен сидеть лицом к ноутбуку. Удаленный пользователь просто поворачивает робота в любом направлении, что позволяет полное взаимодействие. Вы можете быть в двух местах одновременно. Этот слиток технологий имеет жизненно важное значение для многих групп людей.
Ребенок-инвалид может посещать школу, не выходя из дома. Можно увидеть и поговорить с членом своей семьи за многие километры, буквально находясь с ним рядом. Также это помогает обеспечить переводчика в режиме реального времени.
Тот факт, что VGo относительно дешев (6000 долларов), делает его доступным для школ и больниц за рубежом.

Вопросы и задания:
1. Объясните, чем робот отличается от неробота. Верно ли, что радиоуправляемые игрушки — это настоящие роботы?
2. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
6. Kuratas (Suidobashi Heavy Industry)

Kuratas — первый в мире гигантский робот. Его высота — 4 метра, весит он около 4,5 тонн. Вы можете залезть в него. Интерфейс водителя работает с использованием Kinect, но если вы предпочитаете управлять своими роботами с безопасного расстояния, можно использовать сенсорный экран телефона в качестве пульта дистанционного управления.
Этого робота решил разработать художник Когоро Курата, вдохновившись аниме. Ему помогал Ватару Йошизаки, робототехник.
Kuratas движется с помощью четырех колес, может разгоняться до 10 км/ч и носить оружие. Когоро Курата называет Kuratas «произведением искусства», что неудивительно, если учесть скромную цену в 1,3 миллиона долларов.
В любом случае, это не самое выдающееся произведение инженерного искусства.

Основы роботов

У подавляющего большинства роботов действительно есть общие черты. Прежде всего, почти у всех роботов есть подвижное тело. Некоторые обладают только моторизованными колесами, у других есть десятки подвижных сегментов, как правило, из металла или пластика. Как кости в вашем теле, отдельные сегменты соединяются вместе с помощью суставов.
Колеса робота и поворотные суставные сегменты активизируются при помощи приводов разного рода. Некоторые роботы используют электродвигатели и соленоиды в качестве актуаторов (приводов); некоторые используют гидравлическую систему; некоторые — пневматическую систему (на основе сжатых газов). Роботы могут использовать все эти типы приводов.
Робот нуждается в источнике питания, чтобы управлять этими приводами. Большинство роботов либо оснащены батареей, либо работают от розетки. Гидравлическим роботам нужен насос для создания давления в гидравлической системе, а пневматическим роботам нужен воздушный компрессор или баллоны со сжатым воздухом.
Все приводы подключаются к электрической цепи. Цепь напрямую питает электродвигатели и соленоиды, что активизирует гидравлическую систему при помощи электрических клапанов. Клапаны направляют сжатую жидкость через машину. Для перемещения гидравлической ноги, например, оператор робота должен открыть клапан, ведущий от жидкостного насоса к поршневому цилиндру, закрепленному на ноге. Жидкость под давлением будет двигать поршень, толкая ногу вперед. Чтобы двигать конечностями в обоих направлениях, роботы используют поршни, которые могут толкаться в обе стороны.
Компьютер робота управляет всем, что подключено к цепи. Чтобы передвигать робота, компьютер активирует все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать, чтобы изменить поведение — достаточно просто ввести новую программу в компьютер.
Не у всех роботов есть система сенсоров, и лишь некоторые обладают способностью видеть, слышать, чувствовать запах или вкус. Самая распространенная способность робота — способность ходить и наблюдать за своим перемещением. Стандартная конструкция использует колеса с щелью в суставах робота. Светодиод на одной стороне колеса пускает луч света через щель, чтобы подсветить датчик света на другой стороне колеса. Когда робот движет определенным суставом, колесо с щелью крутится. Щель разбивает луч света по мере вращения колеса. Световой датчик считывает поведение светового луча и передает данные на компьютер. Компьютер точно может сказать, как вращается сустав в определенной модели. По тому же принципу работает компьютерная мышь.
Это основы робототехники. Робототехники могут комбинировать эти элементы в бесконечное число способов создания роботов неограниченной сложности.
4. Bebionics3 (RSLSteeper)

Bebionic3 — это самый современный протез руки сегодняшнего дня, способный поднимать до 45 килограммов, но все еще достаточно чувствительный, чтобы можно было писать ручкой или держать бумажный стаканчик. С помощью датчиков, которые контактируют с кожей пользователя, легко управляются пальцы, причем скорость и силу можно настроить в любой конкретный момент. Протез можно купить вместе с перчаткой, которая придаст руке человеческий вид.
Вспомните знаменитую сцену из второго «Терминатора», когда Арни срезает кожу с руки, обнажая роботизированный скелет под ней? Кто бы мог подумать, что мы были на пороге аналогичной технологии всего 20 лет назад?
Протез обойдется в 25-35 тысяч долларов. Это недешево, но бесценно для ампутантов, которые хотят вновь обрести независимость.

Читайте также: