
Как выставить ток на драйвере a4988
Сегодня расскажу о драйвере A4988, данный драйвер подойдет тем, кто планирует создать свой собственный 3D-принтер или станок ЧПУ с управлением шаговым двигателям.
Технические параметры
► Напряжения питания: от 8 до 35 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16
► Напряжение логики: 3 В или 5.5 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1 А без радиатора, 2 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере A4988
Основная микросхема модуля это драйвер от Allegro — A4988, которая имеет небольшие размеры (всего 8 мм х 6 мм), хоть микросхема и маленькая, но она может работать с выходным напряжение до 35 В с током до 1 А на катушку без радиатора и до 2 А с радиатором (дополнительным охлаждением). Для управления шаговым двигателем, необходимо всего два управляющих контакта (по сравнению с L298N необходимо четыре), один используется для управления шагами, второй для управления вращения двигателем.
Драйвер позволяет использовать пять вариантов шага, полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг.
Распиновка драйвера A4988:
На драйвере A4988 расположено 16 контактов, назначение каждого можно посмотреть ниже:
► EN — включение и выключение модуля (0 — включен, 5 В — выключен).
► MS1, MS2 и MS3 — выбор режима микро шаг (смотрите таблицу ниже).
► RST — сброс драйвера.
► SLP — вывод включения спящего режима, если подтянуть его к низкому состоянию драйвер перейдет в спящий режим.
► STEP — управляющий вывод, при каждом положительном импульсе, двигатель делает шаг (в зависимости от настройки микро шага), чем быстрее импульсы, тем быстрее вращаться двигатель.
► DIR — управляющий вывод, если подать +5 В двигатель будет вращается по часовой стрелке, а если подать 0 В против часовой стрелки.
► VMOT & GND — питание шагового двигателя двигателя от 8 до 35 В (обязательное наличие конденсатора на 100 мкФ ).
► 2B, 2A, 1B, и 1A — подключение обмоток двигателя.
► VDD & GND — питание внутренней логики от 3 В до 5,5 В.
Если не планируете использовать вывод RST необходимо подключить его к выводу SLP, чтобы подтянуть его к питанию, тем самым включить драйвер.
Настройка микрошага
Драйвер A4988 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов, драйвер A4988 имеет три выхода, а именно MS1, MS2 и MS3. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.
Вывода MS1, MS2 и MS3 в микросхеме A4988 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения A4988
При интенсивной работе микросхемы A4988 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации A4988 может работать с током до 2 А на катушку, но на практике микросхема не греется если ток не превышает 1 А на катушку. Поэтому если ток выше 1 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.
Настройка тока A4988
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Существует два способа настройки:
1. Замерить ток, для этого возьмем амперметр и подключим его в разрыв любой из обмоток (двигатель должен работать в полношаговом режиме), так же, при настройки ток должен составлять 70% от номинального тока двигателя.
2. Расчет значение напряжения Vref, согласно документации на A4988, есть формула I_TripMax = Vref / (8 × Rs), из которой мы можем получить формулу.
Vref = I_TripMax x 8 x Rs
где,
I_TripMax — номинальный ток двигателя
Rs — сопротивление на резисторе.
В моем случаи на драйвере A4988 установлены резисторы Rs = 0,100 Ом (R100), а номинальный ток двигателя 17HS4401 равняется 1,7 А.
Vref = 1,7 х 8 х 0,100 = 1,36 В
Мы рассчитали максимальное значение для двигателя 17HS4401, но при таком напряжение двигатель будет греться в режиме ожидания, необходимо уменьшить это значение на 70%, то есть:
Vref х 0,7 = 0,952 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.
Подключение драйвера шагового двигателя A4988 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя A4988 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Теперь, можно приступить к сборке схемы. Первым делом, подключаем VDD и GND к 5 В и GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам 2B, 2A, 1A и 1B.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLEEP, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.
Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера A4988, загружайте данный скетч в Arduino.

Продолжаю сборку станка ЧПУ. Шаговые двигателя я уже подобрал. Для проверки электроники, собрал тестовое подключение на столе.
Сперва я подключил к CNC shield v3 шаговые двигателя:
- 17HS4401 - ток 1,7A
- EM-181 - ток 1,2A
- EM-142- значение максимального тока не нашел.
Двигателя выбраны сейчас нам нужно настроить рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
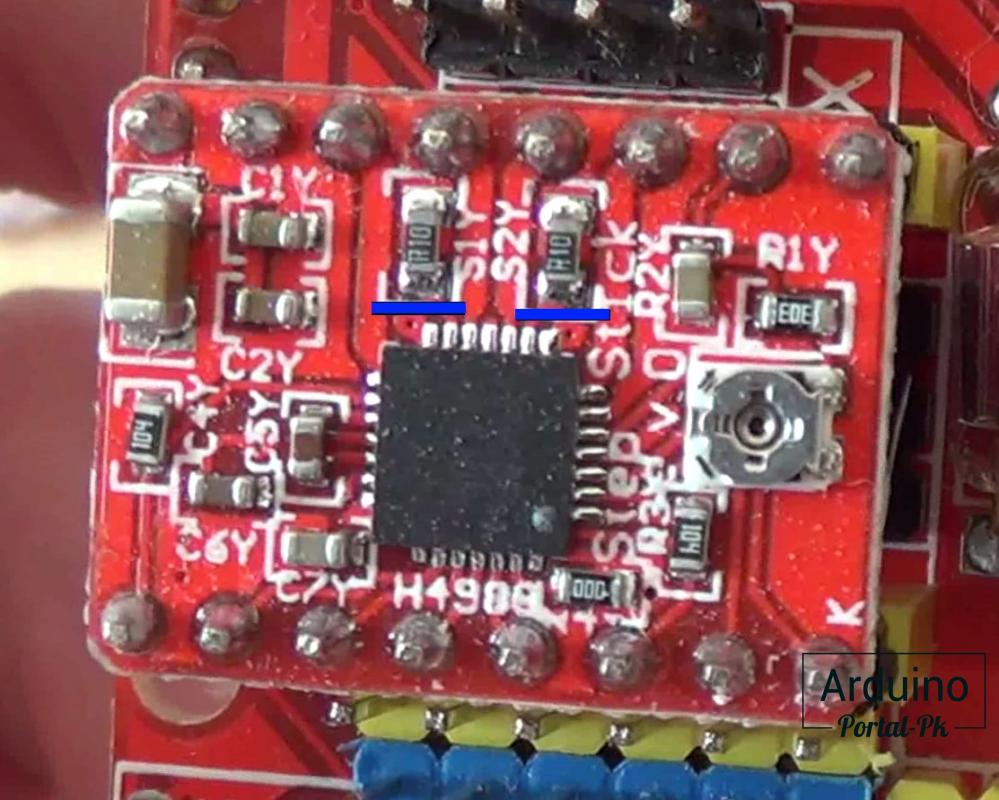
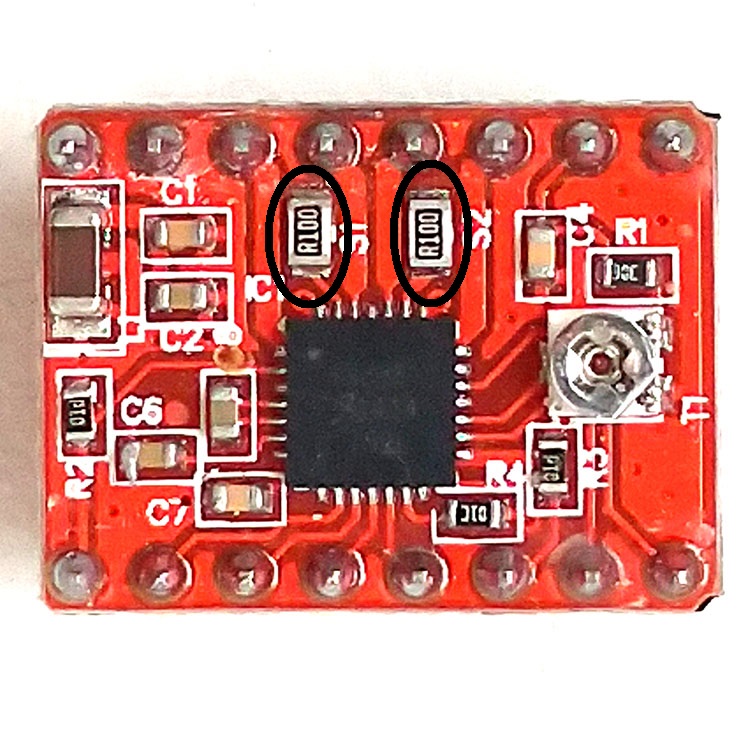
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Аналогично рассчитываю значения для EM-181
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Так как я не смог найти datasheets для ЕМ-142. Для расчетов предложил, что ток на обмотку данного двигателя составляет 0,6 А. Если двигатель будит издавать гул сильнее обычного значит ток превышает максимальное значение. Его нужно понижать. Так как я взял ток обмотки. При расчете Vref ист. Не нужно умножать на 0,7, как я говорил выше ток одной обмотки составляет 70% от номинального. Расчет будет вот таким:
Vrefист. = 0,6 * 8 * 0,100 = 0,48 В.
По моим ощущениям я угадал с током двигателя ЕМ-142. Останется рассчитать сколько шагов он делает для совершения одного оборота. Об этом расскажу в следующей статье.
В видео подключил кнопки «Пауза», «Продолжить», «Аварийная остановка» . Подключил на пины шпинделя светодиод. И протестировал работу. Так же установил один конечный выключатель. Все работает. Если у вас возникли вопросу что куда подключается к CNC shield v3, читайте статью: Плата расширения для Arduino UNO, CNC shield v3 и драйверов A4988
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
При замене драйверов необходимо выставлять правильное опорное напряжение, оно же Vref. Драйверы шаговых двигателей — это небольшие чипы, отвечающие за управление приводами на 3D-принтерах, лазерных граверах и других станках с ЧПУ. По сути, они контролируют подачу тока на двигатели.
A4988, TMC2208 и TMC2209 — распространенные драйверы, устанавливаемые на сменные модули или распаянные непосредственно на платах управления. Сменные модули разнятся от производителя к производителю, но, как правило, имеют схожую форму и совместимую распиновку. Отдельно отметим, что ряд управляющих плат поддерживает программное управление током, для них эта статья неприменима.
В этой статье мы разберемся шаг за шагом с расчетом важной настройки в шаговых двигателях — опорного напряжения или Vref. Инструкции затронут широко распространенные драйверы A4988, а также более продвинутые TMC2208 и TMC2209.
Что такое Vref
Vref означает «опорное напряжение» и измеряется в вольтах. На практике Vref определяет максимальный ток двигателя, точная настройка этого параметра важна для обеспечения правильного функционирования и длительной эксплуатации как драйверов, так и моторов.
У каждого шагового двигателя есть оптимальный диапазон тока. Слишком низкое значение может привести к пропуску шагов и возникновению дефектов в виде сдвига слоёв или пропусков подачи (для экструдера). С другой стороны, слишком высокое может привести к перегреву драйверов, это тоже приводит к пропуску шагов; также превышение допустимого тока может вывести из строя двигатель.
Что понадобится
Чтобы рассчитать правильное значение Vref для конкретного драйвера, первым делом необходимо выяснить значение номинального тока двигателей. Эта информация обычно предоставляется производителем, хотя для некоторых двигателей ее может быть сложно найти.
Сообщество RepRap поддерживает детализированную базу данных по наиболее распространенным двигателям NEMA 17. Здесь можно найти необходимую информацию по маркировке на корпусе мотора. В качестве примера мы будем использовать NEMA 17 42SHDC3025-24B, согласно базе данных рассчитанный на ток силой 0,9 A.
Для настройки значения Vref непосредственно на плате потребуются насколько инструментов:
• материнская плата 3D-принтера или ЧПУ-станка с источником питания;
• пластиковая или керамическая отвертка, обычно на 1,5 мм.
Драйверы A4988
A4988 — один из наиболее распространенных типов драйверов в настольном оборудовании, включая 3D-принтеры. Эти чипы разработаны компанией Allegro MicroSystems и пользуются популярностью ввиду дешевизны.
Как рассчитать Vref
Опорное напряжение рассчитывается по простой формуле:
Vref = I x 8 x Rsense
I — это номинальный ток мотора, а Rsense означает сопротивление токоизмерительного резистора. Rsense — постоянное значение, которое можно определить по маркировке на плате.

Сопротивление токоизмерительных резисторов варьируется от производителя к производителю, обычно в пределах 0,05-0.2 Ом. Найдите два резистора, как показано на иллюстрации выше. В нашем случае это резисторы R100 с сопротивлением 0,1 Ом.
Хотя мы будем использовать шаговый двигатель с номинальным током 0,9 A, выставлять максимальное значение не следует. Желательно понизить силу тока хотя бы на 10%, что в нашем случае означает примерно 0,8 А.
Vref = 0,81 х 8 х 0,1 = 0,64 В
Как настроить Vref с помощью потенциометра
Значение Vref мы рассчитали, осталось выставить его на драйвере. Платы драйверов A4988 оснащаются потенциометрами специально для этой цели.
Как это делается:
1. Установите драйвер на плату контроллера, не подключая питание. Если вы имеете дело с Ramps 1.4, не забудьте заодно подсоединить Arduino Mega.
2. Подайте питание на плату через VDD и GND, но не USB.
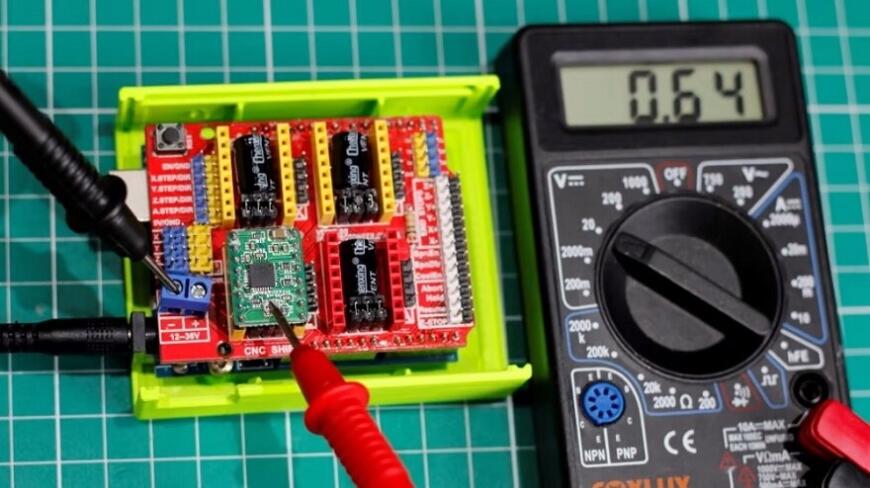
3. Выставите на мультиметре напряжение постоянного тока и правильную шкалу — в районе 2 В.
4. Коснитесь черным щупом GND, как показано на иллюстрации выше.
5. Красным щупом осторожно коснитесь потенциометра драйвера, чтобы измерить Vref.
Будьте аккуратны при работе с красным щупом: касание не в том месте потенциально может закоротить драйвер или контроллер.
Настройка тока драйверов осуществляется при отключенных моторах.
Теперь мы знаем текущее значение Vref и можем подогнать его под рассчитанное ранее с помощью отвертки. Это операцию может потребоваться провести несколько раз, внося изменения и проверяя результаты, пока не будет получено необходимое значение.
Если вы используете отвертку с пластиковым или керамическим кончиком, можно подкручивать потенциометр при подключенном питании без риска повреждения платы. Если же кончик металлический, лучше не рисковать и отключать питание во время настройки, а затем снова подключать питание для замера нового значения.
Направление вращения потенциометра зависит от производителя, поэтому в первой попытке ограничьтесь лишь небольшой корректировкой в ту или иную сторону и проверьте результат, чтобы понять в какую сторону крутить до необходимого значения.
Повторите операцию, пока не получите значение, максимально близкое к расчетному. Имейте в виду, что выставить абсолютно точное значение может быть трудной задачей, но чем ближе, тем лучше.
Дальше остается только проделать то же самое с остальными драйверами.
Драйверы TMC2208 и 2209
Драйверы с обозначениями TMC разработаны компанией Trinamic Motion Control. TMC2208 и TMC2209 — очень тихие варианты, поддерживающие дробление шагов до 1:256. Будучи современными драйверами они могут функционировать как самостоятельно, так и в режиме UART.
В режиме UART ток двигателя можно настроить через прошивку, а в самостоятельном режиме изменения необходимо вносить вручную. Процесс довольно схож с настройкой драйверов A4988.
Как рассчитать Vref
Процедура расчета Vref одинакова для TMC2208 и TMC2209. Формула выглядит вот так:
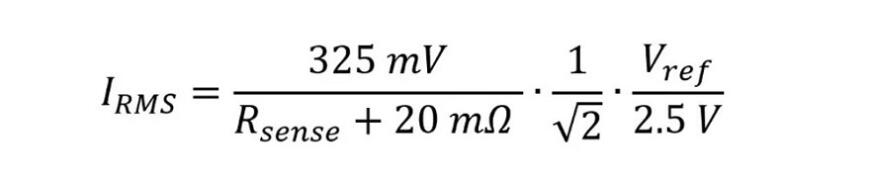
Irms — среднее квадратичное значение тока, а Rsense — сопротивление токоизмерительного резистора.
Значение Rsense можно выяснить по маркировке, точно так же как с A4988, только на этот раз ищите резисторы на нижней стороне платы. Чтобы рассчитать Irms просто поделите ток шагового двигателя на 1.4 (квадратный корень из двух).

Для иллюстрации процесса давайте рассчитаем Vref драйвера TMC2209 от BigTreeTech в связке с шаговым двигателем на 0,9 А. Имейте в виду, что максимальное значение тока для TMC2208 не должно превышать 1,2 A.
Rsense для этого драйвера — 0,11 Ом, так как используются резисторы R110. В нашей формуле используются миллиомы, так что берем 110 мОм. Ради безопасности силу тока вновь снижаем примерно на 10% от максимальной и получаем 0,8 А.
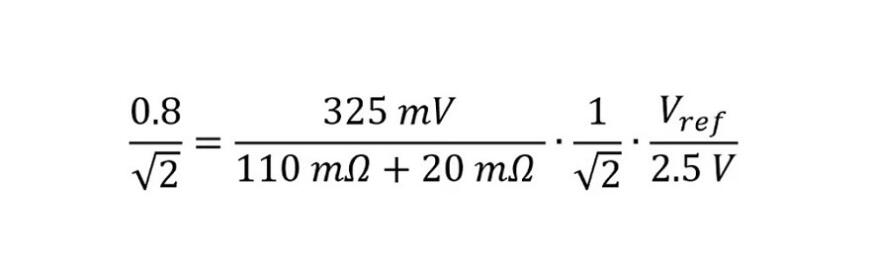
Дальше считаем по формуле и получаем значение Vref равное 0,8 В.
Как настроить Vref с помощью потенциометра
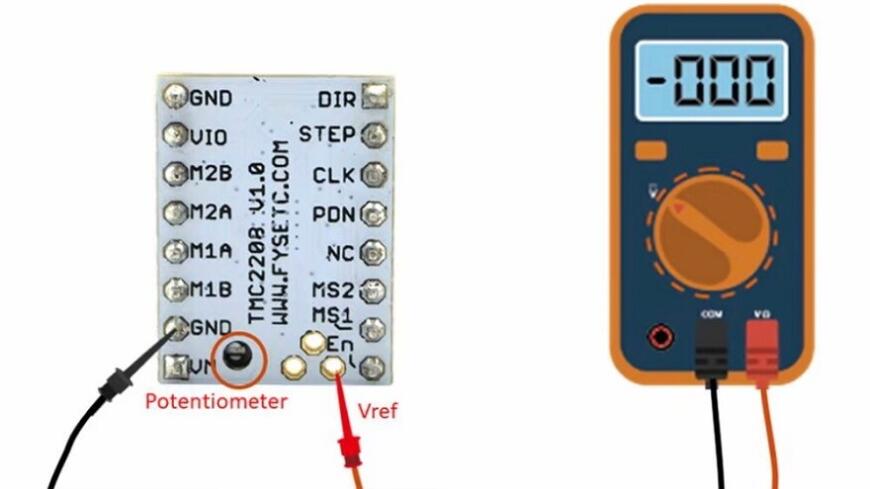
Ручная настройка Vref для TMC2208 и TMC2209 выполняется таким же образом, как для A4988, с той лишь разницей, что красным щупом необходимо замерять в другом месте. Где щупать — показано на иллюстрации выше, на всякий случай все же сначала проверьте документацию от производителя.
Все остальные шаги и рекомендации по настройке Vref на TMC2208 и TMC2209 точно такие же, как для A4988.
Перевод статьи Vref Calculator: How to Tune Your Stepper Driver. Оригинал размещен на сайте All3DP по этой ссылке.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
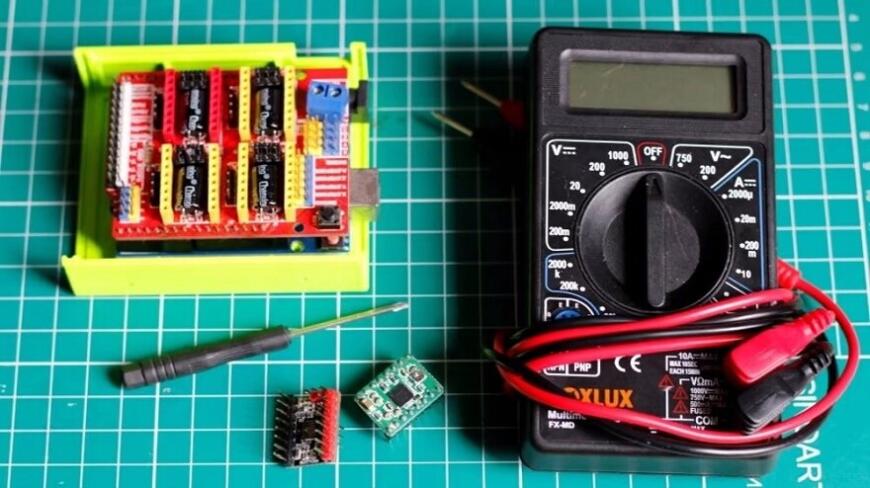
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825 ;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100.
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
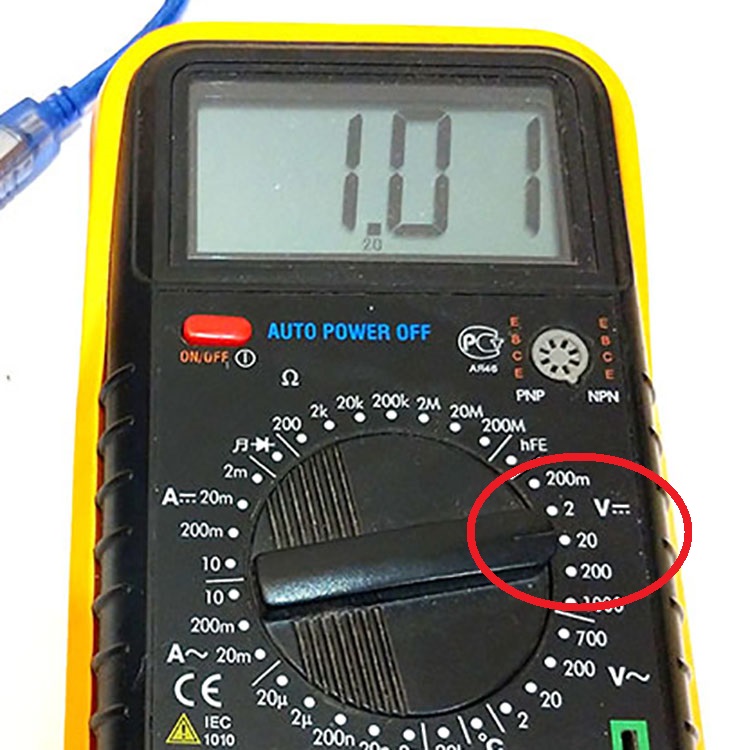
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
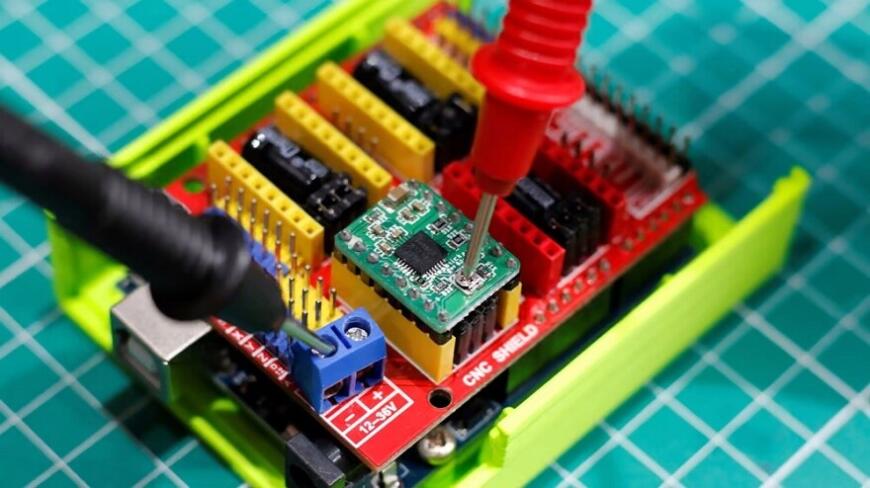
Настройка тока драйвера на контроллере.
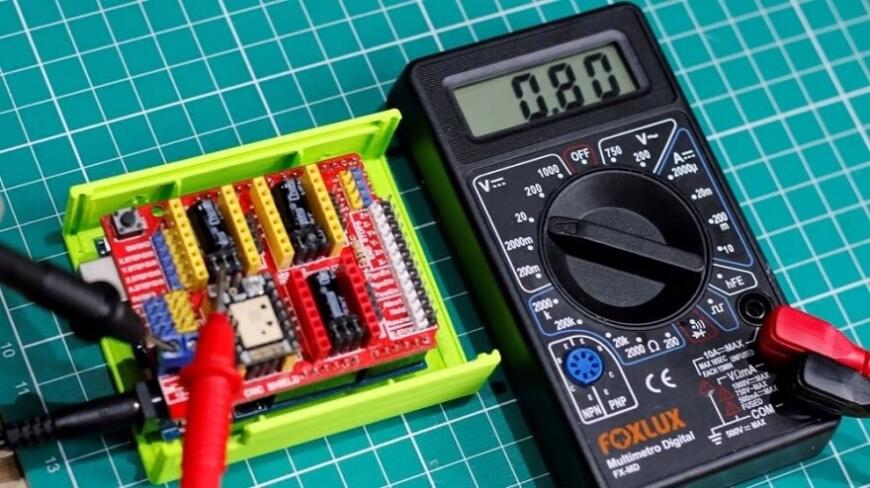
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения "20".
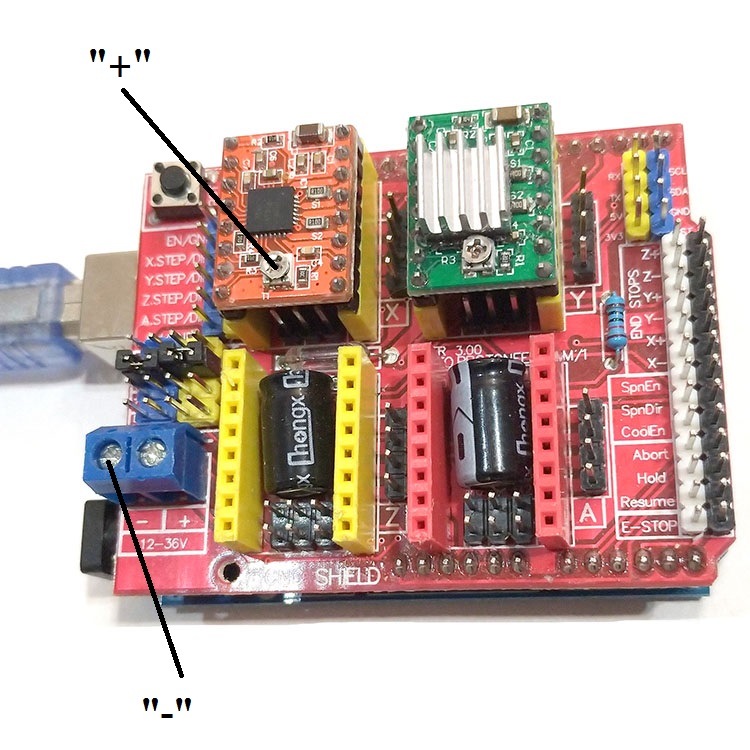
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является "+" в данной схеме.
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки - напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.

В предыдущей статье рассказывало о драйвере для биполярного шагового двигателя A4988, который часто используют в проектировании станков ЧПУ. В этой статье расскажу о другом драйвере DRV8825, который полностью взаимозаменяемый с драйвером A4988 и может работать с микрошагом до 1/32, напряжением до 45 В и током до 2.5 А.
Технические параметры
► Напряжения питания: от 8,2 до 45 В
► Установка шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32
► Напряжение логики: 3.3 В
► Защита от перегрева: Есть
► Максимальный ток на фазу: 1.5 А без радиатора, 2.5 А с радиатором.
► Габариты модуля: 20 мм х 15 мм х 10 мм
► Габариты радиатора: 9 мм х 5 мм х 9 мм
Общие сведения о драйвере DRV8825
Основная микросхема модуля это драйвер от TI (Texas Instruments Inc.) DRV8825, которая способна управлять одним биполярным шаговым двигателем. Как говорил ранее данный драйвер полностью взаимозаменяемый с драйвером A4988. Микросхема DRV8825 может работать с выходным напряжение до 45 В и током до 1.5 на катушку без радиатора и до 2.5 А с радиатором (дополнительным охлаждением). Так же, модуль имеет внутренний стабилизатор напряжение, который напитывает логическую часть модуля напряжение 3.3 В от источника шагового питания двигателя.
Драйвер позволяет использовать шесть вариантов шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32

Распиновка драйвера DRV8825:
На драйвере DRV8825 расположено 16 контактов, назначение каждого можно посмотреть ниже:

► EN — включение и выключение модуля (0 — включен, 5 В — выключен).
► M0, M1 и M2 — выбор режима микро шаг (смотрите таблицу ниже).
► RST — сброс драйвера.
► SLP — вывод включения спящего режима, если подтянуть его к низкому состоянию драйвер перейдет в спящий режим.
► STEP — управляющий вывод, при каждом положительном импульсе, двигатель делает шаг (в зависимости от настройки микро шага), чем быстрее импульсы, тем быстрее вращаться двигатель.
► DIR — управляющий вывод, если подать +5 В двигатель будет вращается по часовой стрелке, а если подать 0 В против часовой стрелки.
► VMOT & GND MOT — питание шагового двигателя двигателя от 8.2 до 45 В (обязательное наличие конденсатора на 100 мкФ). Так же, нет необходим
► B2, B1, A1, и A2 — подключение обмоток двигателя.
► FAULT — Выход включения защиты, если состояние «0», значит полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или был перегрев.
► GND LOGIC — заземление микроконтроллера.
Настройка микрошага
Драйвер DRV8825 может работать микрошаговом режиме, то есть может подавать питание на катушки с промежуточным уровням. Например, если взять двигатель NEMA17 с шагом 1.8 или 200 оборотов, в режиме 1/4, двигатель будет выдавать 800 шагов за оборот
Дня настройки микрошагов на драйвере DRV предусмотрены три выхода, а именно M0, M1 и M2. Установив соответствующие логические уровни для этих выводов, можно выбрать режим микрошага.

Вывода M0, M1 и M2 в микросхеме DRV8825 подтянуты резистором к земле, поэтому, если не подключать их, двигатель будет работать в режиме полного шага.
Система охлаждения DRV8825
При интенсивной работе микросхемы DRV8825 начинает сильно греется и если температура превысит придельные значение, может сгореть. По документации DRV8825 может работать с током до 2.5 А на катушку, но на практике микросхема не греется если ток не превышает 1.2 А на катушку. Поэтому если ток выше 1.2 А необходимо устанавливать радиатор охлаждения, который идет в комплекте.

Настройка тока DRV8825
Перед использованием мотора нужно сделать небольшую настройку, необходимо ограничить максимальную величину тока, протекающего через катушки шагового двигателя и ограничить его превышение номинального тока двигателя, регулировка осуществляется с помощью небольшого потенциометра.
Для настройки необходимо рассчитать значение напряжения Vref.
Vref = Current Limit / 2
где,
Current Limit — номинальный ток двигателя
В моем случаи, номинальный ток двигателя 17HS4401 равняется 1,7 А.
Vref = 1,7 / 2 = 0,85 В
Осталось только настроить, берем отвертку и вольтметр, плюсовой шуп вольтметра устанавливаем на потенциометр, а шуп заземления на вывод GND и выставляем нужное значение.

Подключение драйвера шагового двигателя DRV8825 к Arduino UNO
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер шагового двигателя DRV8825 x 1 шт.
► Шаговый двигатель 17HS4401 x 1 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Теперь, можно приступить к сборке схемы. Первым делом подключаем GND LOGIC к GND на Arduino. Контакты DIR и STEP подключим к цифровым контактам 2 и 3 на Arduino. Подключение шагового двигатель к контактам B2, B1, A2 и A1.
Предупреждение: Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению.
Затем необходимо подключить контакт RST к соседнему контакту SLP к 5В на Arduino, чтобы включить драйвер. Так-же контакты выбора микрошага необходимо оставить не подключенными, чтобы работал режим полный микрошаг. Теперь осталось подключить питание двигателя к контактам VMOT и GND MOT, главное не забудьте подключить электролитический конденсатор на 100 мкФ, в противном случаи при скачке напряжение, модуль может выйти из строя.

Программа:
Теперь можно приступки к программной части и начать управлять шаговым двигателем с помощью драйвера DRV8825, загружайте данный скетч в Arduino.
Читайте также: