
Как работает драйвер шагового двигателя
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:

Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
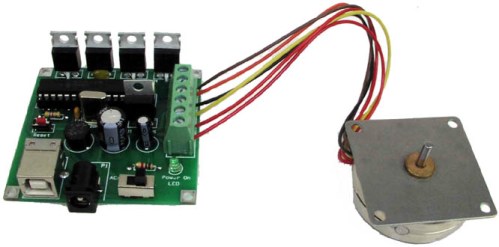
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.

Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:

И вот так расположен наш подопытный:

Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:

Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.

Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.

Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:

Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Для управления двигателями станков с ЧПУ необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателя . Существуют шаговые, серво- и серво-шаговые двигатели.
Рассмотрим подробнее характеристики драйверов шаговых двигателей
Драйвер шагового двигателя – сложное электронное устройство, позволяющее с помощью управляемого переключения тока в обмотках двигателя добиться точного позиционирования вала ШД.
Драйверы, как и любые другие устройства, выпускаются в большом ассортименте, и каждая модель имеет свои особенности. Существуют одноканальные и многоканальные драйверы, позволяющие управлять одним и несколькими шаговыми двигателями соответственно.
Основные отличия драйверов ШД заключаются в их характеристиках и схемотехнике, в наличии или отсутствии определенных опций.
Базовые различающиеся характеристики:
- Электротехнические параметры – питающее напряжение, максимальный ток выхода. Эти параметры должны подходить под шаговый двигатель, которым будет управлять драйвер. Кроме того, драйвер должен позволять менять эти характеристики, для более точной настройки системы. Чем шире диапазон - тем больше возможности драйвера.
- Поддерживаемые протоколы - STEP/DIR, CW/CCW и т.д. Стандартом является протокол STEP/DIR/ENABLE , поэтому лучше выбирать драйвер, поддерживающий именно его.
- Деление шага . Как правило, для плавной работы шагового двигателя и высокой разрешающей способности требуются деления от 1/8 до 1/32. Деления шага на бОльшие значения не приводят ни к повышению механической точности, ни к более плавному ходу, но при этом требуется подавать очень большую частоту STEP на драйвер.
- Функция подавления резонанса. Важнейшая функция современных драйверов, поскольку резонанс возникает на шаговых двигателях всегда. Её наличие повышает стоимость драйвера, но позволяет избежать большого количества проблем с пропуском шагов. Всегда выбирайте драйверы с подавлением резонанса, если есть такая возможность.
- Морфинг . Использование микрошага позволяет добиться более плавного хода передачи, но снижает максимальный момент, развиваемый шаговым двигателем, поскольку суммарный ток в обмотках никогда не достигает максимальных величин.Технология изменения фазовых токов(морфинг) позволяет «выжать» дополнительную мощность из шагового двигателя на высоких оборотах.
- Дампер . Дампер относится к защитным элементам и защищает драйвер от обратной ЭДС двигателя, генерируемой им при торможении. Настоятельно рекомендуем использовать драйверы с встроенным дампером.
- Режим AUTO-SLEEP. Наличие режима AUTO-SLEEP означает, что ток в обмотках шагового двигателя автоматически снижается при простое, что позволяет уменьшить его нагрев.
- Плавный пуск шагового двигателя. При включении драйвера с этой опцией ток в обмотках шагового двигателя нарастает постепенно, благодаря чему исключается характерный удар на валу.
- Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК.
- Разнообразные защитные механизмы: защиту от перегрузок по току, от перегрева, от переполюсовки питающего напряжения. Естественно, чем больше встроенных защит, тем дольше проживет драйвер.
Схемотехнически драйверы тоже могут сильно различаться. Существуют драйверы, выполненные в виде одной микросхемы, например, разновидности микросхем TB6560. Такие микросхемы обычно используют для создания бюджетных многоканальных драйверов без каких-либо дополнительных опций. Одним из драйверов с подавлением резонанса на микросхемах Toshiba является драйвер Purelogic PLC330b .
Самые современные продвинутые драйверы создаются на основе программируемой логической интегральной схемы и сигнальных процессоров, что позволяет реализовать максимум функций.
Компания Purelogic также применяет передовую схемотехнику для своих драйверов нового поколения.
Драйвер шагового двигателя - устройство, виды и возможности
Шаговые двигатели применяются сегодня во многих промышленных сферах. Двигатели данного типа отличаются тем, что позволяют добиться высокой точности позиционирования рабочего органа, по сравнению с другими типами двигателей. Очевидно, что для работы шагового двигателя требуется точное автоматическое управление. Именно этой для этой цели и служат контроллеры шаговых двигателей , обеспечивающие бесперебойную и точную работу электроприводов различного назначения.

Грубо принцип работы шагового двигателя можно описать так. Каждый полный оборот ротора шагового двигателя состоит из нескольких шагов. Подавляющее большинство шаговых двигателей рассчитаны на шаг в 1,8 градуса, и на полный оборот приходится 200 шагов. Привод меняет положение на шаг при подаче на определенную обмотку статора напряжения питания. Направление вращения зависит от направления тока в обмотке.
Следующий шаг — выключается первая обмотка, питание подается на вторую и так далее, в итоге после отработки каждой обмотки ротор совершит полный оборот. Но это грубое описание, на деле алгоритмы несколько сложнее, и об этом будет рассказано далее.
Алгоритмы управления шаговым двигателем
Управление шаговым двигателем может быть реализовано по одному из четырех основных алгоритмов: попеременное включение фаз, управление с перекрытием фаз, полушаговое управление или микрошаговое управление.
В первом случае в каждый момент времени питание получает только одна из фаз, и точки равновесия ротора двигателя на каждом шагу совпадают с ключевыми точками равновесия — полюса отчетливо выражены.
Управление с перекрытием фаз позволяет ротору получить шаги к позициям между полюсными выступами статора, что увеличивает вращающий момент на 40% по сравнению с управлением без перекрытия фаз. Угол шага сохраняется, однако положение фиксации смещено — оно находится между полюсными выступами статора. Эти первые два алгоритма применяются в электротехническом оборудовании, где очень высокая точность не требуется.
Полушаговое управление — комбинация первых двух алгоритмов: через шаг питание получают то одна фаза (обмотка), то две. Размер шага уменьшается вдвое, точность позиционирования получается более высокой, снижается вероятность наступления механического резонанса в двигателе.
Наконец, микрошаговый режим. Здесь ток в фазах меняется по величине так, чтобы положение фиксации ротора на шаг приходилось бы на точку между полюсами, причем, в зависимости от соотношения величин токов в одновременно включенных фазах, таких шагов можно получить несколько. Регулируя соотношение токов, настраивая количество рабочих соотношений, получают микрошаги — наиболее точное позиционирование ротора.
Драйвер шагового двигателя
Чтобы выбранный алгоритм реализовать практически, применяют драйвер шагового двигателя . Драйвер содержит в себе силовую часть и контроллер.
Силовая часть драйвера — это полупроводниковый усилитель мощности, задача которого преобразовать подаваемые на фазы импульсы тока в перемещения ротора: один импульс — один точный шаг или микрошаг.
Направление и величина тока — направление и величина шага. То есть задача силовой части — подать ток определенной величины и направления в соответствующую обмотку статора, удержать этот ток в течение некоторого времени, а также осуществлять быстрое включение и выключение токов, чтобы скоростные и мощностные характеристики привода соответствовали бы поставленной задаче.
Чем более совершенна силовая часть драйвера, тем больший момент можно получить на валу. Вообще, тренд прогресса в совершенствовании шаговых двигателей и их драйверов — получить от двигателей малых габаритов значительный рабочий момент, высокую точность, и сохранить при этом высокий КПД.
Контроллер шагового двигателя
Контроллер шагового двигателя — интеллектуальная часть системы, которая обычно изготовлена на базе микроконтроллера с возможностью перепрограммирования. Именно контроллер отвечает за то, в какой момент, на какую обмотку, на какое время, и какой величины ток будет подан. Контроллер управляет работой силовой части драйвера.
Продвинутые контроллеры подключаются к ПК, и могут регулироваться в режиме реального времени при помощи ПК. Возможность многократного перепрограммирования микроконтроллера избавляет пользователя от необходимости каждый раз при корректировке задачи приобретать новый контроллер — достаточно перенастроить уже имеющийся, в этом гибкость, контроллер можно легко переориентировать программно на выполнение новых функций.
На рынке сегодня представлены широкие модельные ряды контроллеров шаговых двигателей от различных производителей, отличающиеся возможностями расширения функций. Программируемые контроллеры предполагают запись программы, а некоторые включают в себя программируемые логические блоки, при помощи которых возможна гибкая настройка алгоритма управления шаговым двигателем под тот или иной технологический процесс.
Управление шаговым двигателем при помощи контроллера позволяет достичь высокой точности вплоть до 20000 микрошагов на оборот. Причем управление может осуществляться как напрямую с компьютера, так и за счет прошитой в устройство программы или по программе с карты памяти. Если параметры в ходе выполнения задачи меняются, то компьютер может опрашивать датчики, отслеживать меняющиеся параметры и оперативно изменять режим работы шагового двигателя.
Есть в продаже блоки управления шаговым двигателем, к которым подключаются: источник тока, кнопки управления, источник тактового сигнала, потенциометр для настройки шага и т. д. Такие блоки позволяют быстро интегрировать шаговый двигатель в оборудование для выполнения повторяющихся цикличных задач с ручным или автоматическим управлением. Возможность синхронизации с внешними устройствами и поддержка автоматического включения, выключения и управления — несомненное достоинство блока управления шаговым двигателем.
Блок может управляться с компьютера напрямую, если, например, требуется воспроизвести программу для станка с ЧПУ, или в ручном режиме без дополнительного внешнего управления, то есть автономно, когда направление вращения вала шагового двигателя устанавливается датчиком реверса, а скорость регулируется потенциометром. Блок управления подбирается по параметрам к шаговому двигателю, который предполагается использовать.
В зависимости от характера поставленной цели выбирают способ управления шаговым двигателем. Если необходимо настроить простое управление маломощным электроприводом, когда в каждый момент времени один импульс подается на одну катушку статора: на полный оборот нужно, скажем, 48 шагов, и ротор будет перемещаться на 7,5 градусов при каждом шаге. Режим одиночных импульсов в этом случае подойдет.
Для достижения более высокого вращающего момента применяют двойной импульс — в две соседние катушки подается одновременно по импульсу. И если для полного оборота нужно 48 шагов, то опять же нужно 48 таких двойных импульсов, каждый приведет к шагу в 7,5 градусов но с на 40% большим моментом нежели в режиме одиночных импульсов. Скомбинировав оба способа можно получить 96 импульсов разделив шаги — получится 3,75 градуса на шаг — это комбинированный режим управления (полушаговый).
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Управление шаговым двигателем
Электродвигатели преобразуют электрическую энергию в энергию механическую, а что касается шаговых двигателей, то они преобразуют энергию электрических импульсов во вращательные движения ротора. Движение, порождаемое действием каждого импульса, начинается и повторяется с высокой точностью, благодаря чему шаровые двигатели являются эффективными приводами для устройств, требующих точного позиционирования.
Шаговые двигатели на постоянных магнитах включают в себя: ротор с постоянными магнитами, обмотки и магнитопровод статора. Возбуждаемые обмотки создают магнитные северный и южный полюса, как показано на рисунке. Движущееся магнитное поле статора вынуждает ротор все время выравниваться вслед за ним. Это вращающееся магнитное поле можно настраивать, управляя последовательным возбуждением катушек статора, приводящих ротор во вращение.
На рисунке показана схема типичного способа возбуждения двухфазного мотора. В фазе А две катушки статора возбуждены, и это заставляет ротор магнитно притянуться и зафиксироваться, поскольку противоположные магнитные полюса взаимно притягиваются. Когда обмотки фазы А выключается, включается обмотки фазы В, ротор поворачивается по часовой стрелке (англ. CW - по часовой стрелке, CCW – против часовой стрелки) на 90°.

Далее фаза В отключается, и фаза А включается, но полюса располагаются теперь противоположно тому, как было в самом начале. Это приводит к следующему повороту на 90°. Далее фаза А выключается, включается фаза В в обратной полярности.. Повторение этих действий приводит ротор во вращение по часовой стрелке шагами по 90°.

Шаговое управление, показанное на рисунке, называется управлением с одной активной фазой. Более приемлемый способ шагового управления — управление с двумя активными фазами, когда обе фазы мотора всегда включены, однако полярность в одной из них меняется, как показано на рисунке.
Такое управление приводит к движению ротора шагового двигателя, при котором он выравнивается при каждом шаге в центре образующихся северного и южного полюсов, между выступами магнитопровода. Поскольку обе фазы всегда включены, то данный метод управления дает на 41,4% больший вращающий момент, чем управление с одной активной фазой, но требует вдвое больше электрической мощности.

Шаговый двигатель может быть и «полушаговым», тогда добавляется стадия выключения в процессе перехода между фазами. Это делит угол шага напополам. Например, вместо 90° шаговый мотор может делать повороты по 45° на каждом «полушаге», как показано на рисунке.
Но полушаговый режим вносит потери во вращающий момент на 15-30%, по сравнению с шаговым управлением с двумя активными фазами, поскольку одна из обмоток не активна во время половины шага, и это в итоге потеря электромагнитной силы, действующей на ротор, то есть чистая потеря вращающего момента.
Двухфазное шаговое управление подразумевает наличие двухполюсной обмотки на статоре. Каждая фаза имеет свою обмотку, и при реверсе тока через обмотки меняются и электромагнитные полярности. Выходной каскад типичного двухфазного драйвера изображен на рисунке. Схема управления приведена в таблице. Видно, как просто меняя направление тока через обмотки, можно менять и магнитную полярность в фазах.
Другой типичный вид обмотки — однополюсная обмотка. Здесь обмотки разделены каждая на две части, и когда одна часть обмотки возбуждается — создается северный полюс, когда другая часть возбуждается — возникает южный полюс. Такое решение называется однополюсной обмоткой, так как электрическая полярность ответственная за ток никогда не меняется. Шаги управления показаны на рисунке.
Такой дизайн позволяет использовать более простой электронный блок. Однако, здесь почти 30% вращающего момента теряется, в сравнении с двухполюсной обмоткой, потому что в катушках в два раза меньше провода, чем в двухполюсной обмотке.
Другие углы шага
Для получения меньших углов шага необходимо наличие большего количества полюсов как на роторе, так и нас статоре. Ротор для 7.5° имеет 12 пар полюсов, а магнитопровод статора обладает 12 выступами. Два выступа на катушку, и две обмотки.
Таким образом получается 48 полюсов для каждого шага по 7.5°. На рисунке можно рассмотреть 4 полюсных выступа в разрезе. Конечно, можно комбинировать шаги для достижения больших перемещений, например шесть шагов по 7.5° приведут к повороту ротора на 45°.
Точность шаговых двигателей составляет 6-7% на шаг (без накопления). Шаговый двигатель с шагом в 7.5° будет всегда в пределах 0,5° от теоретически предсказанного положения, независимо от того, сколько шагов уже сделано. Ошибка не будут накапливаться, потому что механически каждые 360° повторяются пошагово. Без нагрузки физическое положение полюсов статора и ротора относительно друг друга все время будет одним и тем же.
Шаговые двигатели обладают собственной резонансной частотой, поскольку являются системами подобными грузу на пружине. Когда частота шагов совпадает с собственной резонансной частотой двигателя, можно слышать изменение шума, создаваемого двигателем, кроме того усиливается вибрация.
Точка резонанса зависит от применения двигателя, от его нагрузки, но обычно резонансная частота лежит в диапазоне от 70 до 120 шагов в секунду. В худшем случае двигатель утратит точность управления, если войдет в резонанс.
Простой способ избежать проблем, связанных с резонансом в системе, — изменить частоту шагов в сторону от точки резонанса. В режиме полушага или микрошага масштаб проблемы резонанса уменьшается, поскольку с увеличением скорости точка резонанса остается все дальше позади.
Вращающий момент шагового двигателя является функцией от: скорости шага, тока обмотки статора, типа двигателя. Мощность конкретного шагового двигателя также связана с этими тремя факторами. Вращающий момент шагового двигателя представляет собой сумму момента трения и момента инерции.
Момент трения в граммах на сантиметр — это сила, необходимая для перемещения груза весом в определенное количество грамм при плече рычага длиной в 1 см. Важно отметить, что с увеличением скорости шага двигателя возрастает противо-ЭДС в моторе, то есть генерируемое двигателем напряжение. Это приводит к ограничению тока в обмотках статора и к снижению вращающего момента.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!

В этой публикации я хочу поделиться своим опытом управления. Точнее – управления шагами. А уж если быть совсем точным, речь пойдёт об управлении замечательным устройством – шаговым электродвигателем.
Что же такое этот самый шаговый электродвигатель? В принципе, в плане функциональности этот мотор можно представить как обычный электромотор, каждый оборот вала которого разбит на множество одинаковых, точно фиксированных шагов. Перемещением на определённое количество шагов мы можем позиционировать вал шагового мотора с высокой точностью и хорошей повторяемостью. Каждый шаг можно разбить на множество ступенек (так называемый микростеппинг), что увеличивает плавность хода мотора, способствует подавлению резонансов, а также увеличивает угловое разрешение. Различия между полношаговым режимом (слева), 1/2 микростеппингом (в центре) и 1/16 микростеппингом (справа) видны невооружённым глазом:
К сожалению, все вышеупомянутые преимущества достигаются ценой значительной сложности системы управления шаговым мотором (для простоты будем называть эту систему драйвером).
Теперь рассмотрим схему работы типичного шагового мотора:
Из этой картинки видно, что шаговый мотор в электрическом плане представляет собой два или более электромагнита, которые необходимо переключать в определённой последовательности для приведения ротора в движение.
Лирическое отступление: На настоящий момент существуют два основных типа шаговых моторов: униполярный и биполярный. Поскольку униполярные моторы имеют меньший крутящий момент и худшие скоростные характеристики, в данной публикации они рассматриваться не будут.
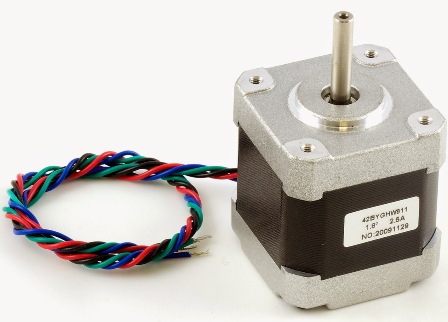
Итак, вернёмся к управлению биполярным мотором. Как это ни парадоксально звучит, но зачастую проще обсуждать общие принципы на конкретных примерах. В качестве примера мы возьмём шаговый мотор ST4118L1804-A производителя Nanotec. Почему именно этот мотор и производитель? Причина проста: по основным характеристикам это типичный представитель моторов типоразмера NEMA 17, широко применяющихся в радиолюбительской практике, и имеет к тому же довольно подробную техдокументацию (которая начисто отсутствует у китайских noname-моторов).
Основные характеристики данного мотора:
Рабочее напряжение 3,15 В
Рабочий ток 1,8 А
Активное сопротивление обмотки 1,75 Ом
Индуктивность обмотки 3,3 мГн
Момент удержания 0,5 Нм
Угловой размер шага 1,8° (200 шагов на один оборот ротора)

В данном случае самое главное — это правильная интерпретация данных. Применив закон Ома, выясняем, что производитель указал рабочий ток и напряжение для постоянного тока, протекающего через обмотки двигателя, без учёта индуктивности.
Проверка: I = U/R, или 1,8 А = 3,15 В/1,75 Ом. Всё сходится.
Какой же будет мощность рассеяния при питании обмоток постоянным током?
Всё просто: P=I x U, или 1,8 А х 3,15 В = 5,67 Вт. В полушаговом режиме возможна ситуация, когда ток течёт через обе обмотки мотора, соответственно рассеиваемую мощность нужно удвоить: 5,67 Вт х 2 = 11,34 Вт. Это достаточно много, и может привести к перегреву мотора. Эта же величина является минимальной мощностью блока питания для этого мотора. Обыкновенный 3D принтер имеет пять подобных моторов, соответственно для питания драйверов необходим источник питания с минимальной мощностью 11,34 Вт х 5 = 56,7 Вт. К этой цифре необходимо добавить электрическую мощность, превращённую мотором в кинетическую или потенциальную энергию при работе принтера. Точный расчёт этой мощности — дело достаточно сложное, на практике проще всего добавить 75% к рассчитанной тепловой мощности и на том завершить расчёты. Почему именно 75%? Дело в том, что обычный шаговый мотор способен совершить полезную работу на величину примерно 2/3 от максимальной тепловой мощности. В данном случае для создания какого-либо узла или устройства сначала подбирается подходящий мотор (например, по крутящему моменту), а после этого рассчитывается мощность блока питания.
Итоговая мощность блока питания для пяти шаговых моторов: 56,7 Вт х 1,75 = 99,225 Вт.
Конечно, на практике ни в одном любительском устройстве не используются моторы под максимальной нагрузкой, и реальная мощность потребления будет, скорее всего, намного ниже расчётной. Я же, как человек ленивый и скаредный, крайне не люблю делать одно и то же два раза, поэтому беру блок питания всегда с некоторым запасом (то есть, согласно вышеприведённым расчётам).
Теперь пришла пора приступить к определению минимально необходимого напряжения блока питания. К сожалению, этому параметру уделяется незаслуженно маленькое внимание в тематических публикациях. Почему этот параметр так важен? Дело в том, что при вращении ротора шагового мотора через катушки течёт переменный ток, ограниченный не только активным, но также и индуктивным сопротивлением обмоток.
Рассмотрим предоставленный производителем график зависимости крутящего момента нашего мотора от частоты вращения:
На графике присутствуют две линии, показывающие зависимость крутящего момента от частоты вращения для напряжения питания 24 В (красная линия) и 48 В (зелёная линия). Нетрудно заметить, что спад крутящего момента начинается примерно с 300 об/мин для 24 В и примерно с 600-700 об/мин для напряжения 48 В. При этом необходимо упомянуть, что производитель использует недоступные любителям дорогостоящие промышленные драйверы. Почему же так важно напряжение питания драйвера, если оно даже в случае питания от 12 В заведомо выше паспортной величины напряжения питания шагового мотора (3,15 В)? Дело в том, что шаговый мотор управляется током, а не напряжением, и именно источниками тока являются все современные драйверы. В идеальном случае драйвер обеспечивает заданный ток в обмотках двигателя вне зависимости от частоты вращения ротора, нагрузки, изменения температуры и других параметров. Это организовано за счёт работы ШИМ-регулятора, управляемого зачастую довольно сложными алгоритмами. Из технической документации нашего мотора видно, что для полного оборота ротору необходимо совершить 200 шагов, при 300 об/мин это составит 60 000 шагов в минуту, или 1000 шагов в секунду. Это, проще говоря, соответствует переменному току частотой 1 кГц. На этой частоте индуктивное сопротивление обмотки составит (R(L)=2π×F×L): 2π х 1 кГц х 3,3 мГн = 20,73 Ом. Какое же напряжение необходимо для обеспеченияя тока в 1,8 А при этом сопротивлении? Закон Ома не дремлет (U=IR): 1,8 А х 20,73 Ом = 37,31 В. Неудивительно, что выше частоты вращения 300 об/мин наблюдается спад крутящего момента: драйверу банально не хватает напряжения питания. Почему же при таком вопиющем недостатке питания (37 — 24 =13 В) спад не наступает при более низкой частоте вращения? Дело в том, что в современных драйверах используется мостовая схема выходных каскадов, что позволяет «удваивать» напряжение, прикладываемое к обмоткам мотора. То есть, теоретически драйвер способен приложить «виртуальные» 48 В к обмоткам при напряжении питания 24 В, что создаёт теоретический запас по напряжению 48 — 37 = 11 В. На практике же этот запас будет нивелирован потерями в драйвере, сопутствующих цепях и активным сопротивлением обмоток мотора (активное сопротивление обмоток присутствует постоянно, и даже несколько возрастает при нагреве мотора). При увеличении частоты вращения ротора свыше 300 об/мин пропорционально растёт частота импульсов и, соответственно, увеличивается индуктивное сопротивление обмотки. При питании от 24 В драйверу перестаёт хватать напряжения питания для поддержания тока в обмотках, и крутящий момент неуклонно снижается. То же самое происходит при питании драйвера от 48 В, но уже гораздо значительно позже, при частоте вращения 600-700 об/мин.
Итак, с мощностью и величиной напряжения блока питания всё ясно, теперь необходимо переходить к практической реализации универсального драйвера, способного как к филигранной работе при помощи крохотных NEMA 11, так и к сотрясению основ мира в паре с могучими NEMA 23. Какими же основными качествами должен иметь драйвер моей мечты?
1. Высокое напряжение питания. Поскольку в техдокументации к моторам крайне редко указано максимальное напряжение питания, лучше будет ограничиться напряжением 48 В.
2. Важнейший параметр: высокий выходной ток. NEMA 23 имеют рабочие токи вплоть до 3,5 А, драйвер должен обеспечивать этот ток с запасом 30%. Путём нехитрых расчётов получаем максимальный рабочий ток около 4,5 А.
3. Простая и оперативная подстройка силы выходного тока.
4. Наличие микростеппинга, как минимум 1/8 шага
5. Наличие защиты от КЗ, перегрева, и т.д.
6. Небольшой размер, возможность крепления произвольного радиатора.
7. Исполнeние в виде интегральной схемы. XXI век на дворе!
8. Простая схема включения с минимальным количеством дискретных компонентов.
9. Низкая цена.
После множества бессонных ночей пятиминутного копания в Google выяснилось, что единственной доступной микросхемой драйвера с подходящими параметрами является TB6600HG. Покупка готового китайского драйвера на eBay показала, что не всё ладно в датском королевстве, далеко не всё. В частности, китайский драйвер отказался напрямую работать с выходами Arduino Due, и «завёлся» только через буферный преобразователь уровней. При работе с трёхамперной нагрузкой драйвер грелся и терял шаги десятками. Вскрытие пациента показало, что в нём не только была установлена микросхема предыдущего поколения (TB6560), а даже и термопаста не смогла найти себе места в списке компонентов. К тому же размерами и весом китайский драйвер наводил меня на мысли о моей молодости… о прошлом веке, если быть совсем точным. Ну нафиг, сказал во мне интеллигент в третьем поколении, мы сделаем свой драйвер, с преферансом и поэтессами. Если бы разработчики KiCAD видели, как я обращаюсь с их детищем, я разорился бы на одних только адвокатах:
С целью минимизации размеров была спроектирована четырёхслойная печатная плата. Этот факт, к сожалению, исключает её изготовление в домашних условиях. Посему на берлинской фирме LeitOn были заказаны 36 таких плат, каждая из которых обошлась в итоге около пяти евро. Часть этих плат были впоследствии выкуплены у меня собратьями по увлечению, и в итоге изготовление плат вышло не слишком накладным предприятием. Микросхемы TBB6600HG были заказаны на Aliexpress по 4 евро за штуку, остальные компоненты были заказаны на eBay, в пересчёте на один драйвер цена дискретных компонентов составила 2 евро. В качестве радиаторов были взяты пятисантиметровые отрезки П-образного алюминиевого профиля, пластиковые каркасы были отпечатаны на 3D принтере. Итого цена одного драйвера составила около 12 евро. Это справедливая цена за драйвер со следующими характеристиками:
Напряжение питания от 8 до 42 Вольт
Максимальный долговременный рабочий ток 4,5 Ампер, устанавливается потенциометром
Микростеппинг вплоть до 1/16 шага
Защита: КЗ, перегрев, низкое напряжение питания
Компактные размеры и низкий вес
Работа с уровнями входных сигналов от 3,3 до 5,5 вольт
Простая установка микростеппинга с помошью микропереключателей — к чёрту перемычки!
Готовые печатные платы:
Собранные и недособранные драйверы.
Видео работы драйвера в моём старом 3D принтере. Здесь трёхамперный NEMA 17 бодро гоняет подогреваемую рабочую площадку принтера размером 45 х 25 см через шестнадцатимиллиметровый шпиндель длиной 60 см:
Финальное фото: самодельные драйвера на своём рабочем месте в моём новом 3D принтере.
Публикуется под лицензией WTFPL
Читайте также: