
Как подобрать драйвер для шагового двигателя
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристки двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.

Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций - тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» - внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом - ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.

Шаговый двигатель - устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика. Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке?
1. Тип двигателя - биполярный, униполярный, 3-фазный и т.п.
Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные - имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах. Биполярные - наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные - представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения - имеет смысл использовать 3-фазный двигатель.
2. График зависимости момента от скорости
Основная характеристика. С этим графиком можно свериться и проверить, может ли данный шаговый двигатель вообще удовлетворить условиям вашего техзадания.
3. Индуктивность
Вычислите квадратный корень из индуктивности обмотки и умножьте на 32, полученное число сравните с напряжением вашего источника питания для драйвера. Эти числа не должны сильно отличаться - если напряжение питания сильно(30 и более %) превышает полученное число, двигатель будет шуметь и греться; если же сильно не дотягивает - крутящий момент будет убывать со скоростью слишком быстро.
4. Геометрические параметры
Фланец, диаметр вала - важны как присоединительные размеры. Фланец вкупе с длиной двигателя также обрисовывает "мощность" шагового двигателя.
Теоретические сведения о режимах работы шагового двигателя
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопротивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога - ток будет ограничен индуктивностью обмоток.
В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики
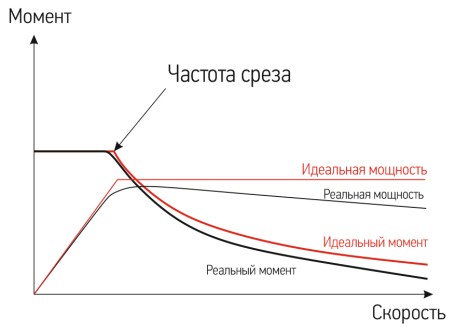
Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке "постоянной мощности". Скругление на переходной точке обусловлено переходным процессом в цепи - драйвер постепенно превращается из источника тока в источник напряжения.
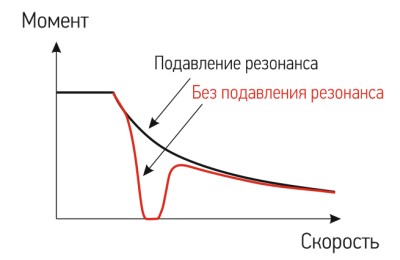
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника "подвешенный на пружине груз", где грузом является ротор, а пружиной - магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
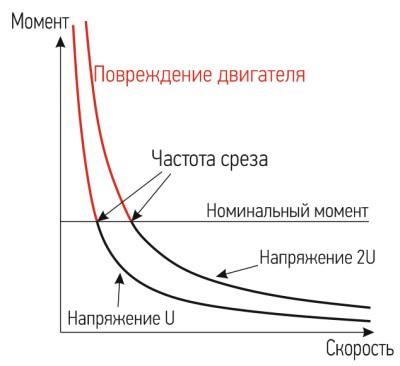
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.
Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
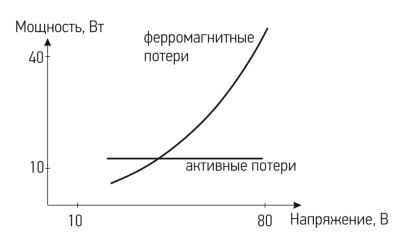
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, - нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
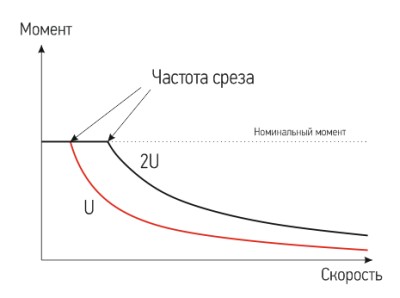
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика - кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной:
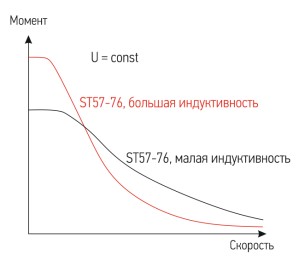
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания - тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях - "медленный" и "быстрый", с большой и малой индуктивностью. Причем "быстрые" модели пользуются большей популярностью - для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности - можно взять двигатель побольше. "Медленные" модели остаются для специфических применений - в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п.
Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю - он должен быть способен выдавать именно такой уровень тока.
Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку - таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 5 вещей - производителя, вида двигателя, размера, тока фазы и индуктивности. Первый параметр поддается оценке с трудом - мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик - размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов - определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
Для управления двигателями станков с ЧПУ необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателя . Существуют шаговые, серво- и серво-шаговые двигатели.
Рассмотрим подробнее характеристики драйверов шаговых двигателей
Драйвер шагового двигателя – сложное электронное устройство, позволяющее с помощью управляемого переключения тока в обмотках двигателя добиться точного позиционирования вала ШД.
Драйверы, как и любые другие устройства, выпускаются в большом ассортименте, и каждая модель имеет свои особенности. Существуют одноканальные и многоканальные драйверы, позволяющие управлять одним и несколькими шаговыми двигателями соответственно.
Основные отличия драйверов ШД заключаются в их характеристиках и схемотехнике, в наличии или отсутствии определенных опций.
Базовые различающиеся характеристики:
- Электротехнические параметры – питающее напряжение, максимальный ток выхода. Эти параметры должны подходить под шаговый двигатель, которым будет управлять драйвер. Кроме того, драйвер должен позволять менять эти характеристики, для более точной настройки системы. Чем шире диапазон - тем больше возможности драйвера.
- Поддерживаемые протоколы - STEP/DIR, CW/CCW и т.д. Стандартом является протокол STEP/DIR/ENABLE , поэтому лучше выбирать драйвер, поддерживающий именно его.
- Деление шага . Как правило, для плавной работы шагового двигателя и высокой разрешающей способности требуются деления от 1/8 до 1/32. Деления шага на бОльшие значения не приводят ни к повышению механической точности, ни к более плавному ходу, но при этом требуется подавать очень большую частоту STEP на драйвер.
- Функция подавления резонанса. Важнейшая функция современных драйверов, поскольку резонанс возникает на шаговых двигателях всегда. Её наличие повышает стоимость драйвера, но позволяет избежать большого количества проблем с пропуском шагов. Всегда выбирайте драйверы с подавлением резонанса, если есть такая возможность.
- Морфинг . Использование микрошага позволяет добиться более плавного хода передачи, но снижает максимальный момент, развиваемый шаговым двигателем, поскольку суммарный ток в обмотках никогда не достигает максимальных величин.Технология изменения фазовых токов(морфинг) позволяет «выжать» дополнительную мощность из шагового двигателя на высоких оборотах.
- Дампер . Дампер относится к защитным элементам и защищает драйвер от обратной ЭДС двигателя, генерируемой им при торможении. Настоятельно рекомендуем использовать драйверы с встроенным дампером.
- Режим AUTO-SLEEP. Наличие режима AUTO-SLEEP означает, что ток в обмотках шагового двигателя автоматически снижается при простое, что позволяет уменьшить его нагрев.
- Плавный пуск шагового двигателя. При включении драйвера с этой опцией ток в обмотках шагового двигателя нарастает постепенно, благодаря чему исключается характерный удар на валу.
- Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК.
- Разнообразные защитные механизмы: защиту от перегрузок по току, от перегрева, от переполюсовки питающего напряжения. Естественно, чем больше встроенных защит, тем дольше проживет драйвер.
Схемотехнически драйверы тоже могут сильно различаться. Существуют драйверы, выполненные в виде одной микросхемы, например, разновидности микросхем TB6560. Такие микросхемы обычно используют для создания бюджетных многоканальных драйверов без каких-либо дополнительных опций. Одним из драйверов с подавлением резонанса на микросхемах Toshiba является драйвер Purelogic PLC330b .
Самые современные продвинутые драйверы создаются на основе программируемой логической интегральной схемы и сигнальных процессоров, что позволяет реализовать максимум функций.
Компания Purelogic также применяет передовую схемотехнику для своих драйверов нового поколения.
Шаговый двигатель — двигатель со сложной схемой управления, которому требуется специальное электронное устройство — драйвер.

Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3, LinuxCNC или PureMotion.
Задача драйвера — изменять ток в обмотках как можно более эффективно. Поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т. п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1. Драйверы постоянного напряжения. Эти драйверы подают постоянный уровень напряжения поочередно на обмотки. Результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности. Эти драйверы крайне неэффективны и могут быть использованы только на очень малых скоростях.
2. Двухуровневые драйверы. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны. Помимо прочего, они снижают нагрев двигателей. Их все еще можно иногда встретить в высококлассном оборудовании. Однако такие драйверы поддерживают только режим шага и полушага.
3. Драйверы с ШИМ. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны. Практически все представленные сейчас на рынке драйверы как раз этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижении током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем. Иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Лучше, если частота драйвера будет более 20 кГц. И вообще, чем она больше, тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, в результате шаговые моторы начинают издавать неприятный писк.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные.
Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей. Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
ВЫБОР ДРАЙВЕРА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ
Cила тока
Первый параметр, на который стоит обратить внимание, — это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя.
Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15–40 % больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель. С другой стороны, не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Напряжение питания
Второй момент — это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Существует эмпирическая формула U = 32 * √(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера. U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы PLD86, PLD880.
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
Читайте также: