
Как подключить шаговый двигатель к драйверу tb6600
ГЛАВНАЯ / КАтегории / Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).

С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
Подключение управляющих выводов драйвера:
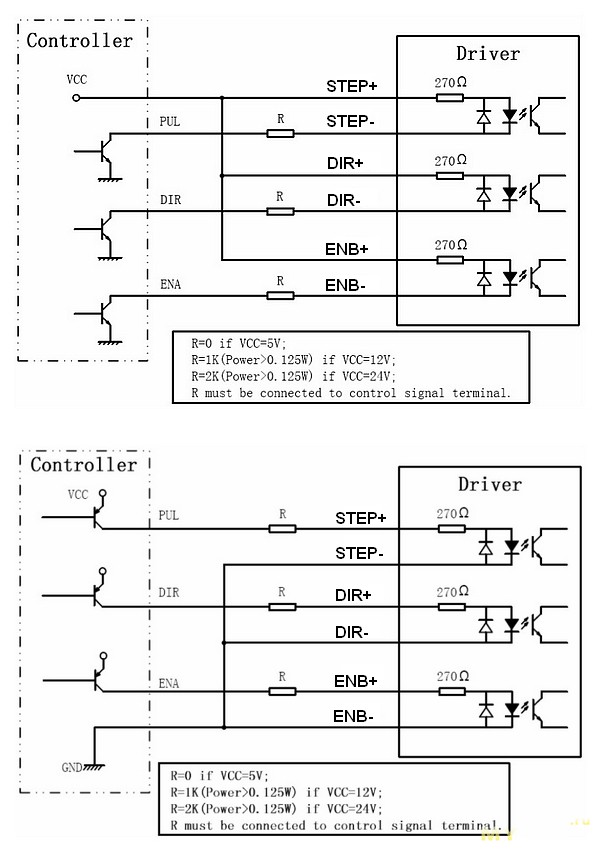
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.

Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.

Шаговый двигатель 42x42x34
Общие сведения:
Драйвер шагового двигателя TB6600 - предназначен для управления биполярным шаговым двигателем с номинальным напряжением от 9В до 42В и пиковым током до 4,0А. Драйвер оснащен защитой от перегрева, от повышенного напряжения и от перегрузки по току. Все входы управления имеют оптическую развязку.
Характеристики:
- Напряжение шагового двигателя: 9-42В;
- Рабочий ток шагового двигателя: до 3,5А;
- Пиковый ток шагового двигателя: до 4,0А;
- Микрошаг: 1 / 2 / 4 / 8 / 16 / 32;
- Напряжение на управляющих входах: 5-24В.
(напряжение выше 5В подаётся через ограничительный резистор, см. схему); - Сигналы управления: PUL/DIR (STEP/DIR);
- Частота импульсов PUL (STEP): до 200кГц;
- Рабочая температура: от 0 до +50 °C.
Подключение:
Назначение силовых выводов колодки «High Viltage»:
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Биполярные двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Назначение выводов управления колодки «Signal»:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino и назначение управляющих сигналов, описано в статье Wiki - Сигналы управления драйвера ШД.
Настройка:
Выбор микрошага:
Микрошаг настраивается DIP-переключателями S1, S2 и S3 согласно таблице на корпусе.
В таблице указано количество микрошагов на полный шаг, количество тактов на полный оборот вала и положение переключателей.
Выбор тока фазы:
Ток фазы настраивается DIP-переключателями S4, S5 и S6 согласно таблице на корпусе.
В таблице указан рабочий ток, пиковый ток и положение переключателей.
Индикация ошибок:
Зелёный светодиод:
- Не светится - отсутствует питание на выводах «VCC» и «GND» колодки «High Viltage».
Красный светодиод:
- Мигает 1 раз через паузу - ток в обмотках двигателя превысил допустимый предел;
- Мигает 2 раза через паузу - напряжение питания превысило допустимый предел;
Комплектация:
Ссылки:
Убедитесь, что у вас есть все необходимое для вашего проекта – ниже представлен выбор необходимых дополнительных услуг!
Статьи 8 30.11.2015 30.12.2017

Содержание
Введение:
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на замену популярному драйверу BL-TB6560-V2.0.
Этот драйвер-контроллер подойдет для построения не только любительских систем ЧПУ, но и профессиональных, основаных на двигателях высокой мощности. Если сравнивать с предыдущим поколением драйвера TB6560AHG, то выходная мощность у TB6600HG возросла до 200Вт (как видим практическое удвоение по значению мощности), рабочее напряжение поднято с 35В (TB6560AHG) до 50В, рабочий ток увеличен до 4.5А (5А пиковое значение).
Увеличена максимальная рабочая частота.
Добавлены схемы защиты.
К основной "вкусности" данного драйвера можно отнести интеллектуальное управление током и использование ШИМ моделяции, благодаря чему есть возможность подключать к драйверу шаговые двигатели любого напряжения питания и тока - на установленном уровне микросхема сама ограничит максимальный ток.
Внешний вид:




Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором

Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором

Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
Подключение драйвера BL-TB6600-v1.2 к плате BL-MACH-V1.1:

Более подробно о интерфейсной плате BL-MACH-V1.1 можно узнать по ссылке Плата коммутационная (контроллер) BL-MACH-V1.1
СТАТЬЯ В ПРОЦЕССЕ НАПИСАНИЯ
Обновлено: 30.12.2017
Статьи 29 14.05.2015 06.12.2016

Содержание
Введение:
BL-TB6560-V2.0 - драйвер управления двухфазным шаговым двигателем реализован на специализированном интегральной микросхеме Toshiba TB6560AHQ c питанием постоянным напряжением от 10В до 35В (рекомендуется 24В). Используется для управления двигателями типа Nema17, Nema23 с регулируемым максимальным током фазы до 3А и оптоизолированными входными сигналами. Широко используется в системах ЧПУ и 3D-принтерах.
Внешний вид:



Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| CLK+,CLK- | Положительный и отрицательный контакты для тактового сигнала |
| CW+,CW- | Положительный и отрицательный контакты для управления направлением вращения оси шагового двигателя |
| EN+,EN- | Положительный и отрицательный контакты для сигнала работы шагового двигателя |
| +24D,GND | Положительный и отрицательный контакты для подключения блока питания |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором
Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором
Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
Подключение драйвера к периферии:
Пример подключения драйвера к контролллеру BL-MACH-V1.1 (BB5001)

Настройка переключателей
Микрошаг (делитель шага) устанавливается с помощью переключателей S3, S4 как показано на рисунке:

Микрошаг - режим управления шаговым двигателем , под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
Значения делителя шага указаны в таблице ниже:
| Значение делителя | S3 | S4 |
|---|---|---|
| 1:1 | OFF | OFF |
| 1:2 | ON | OFF |
| 1:8 | ON | ON |
| 1:16 | OFF | ON |
Настройка выходного тока, который поступает на шаговый двигатель, в режиме удержания осуществляется с помощью переключателя S2:

Удержание ротора - режим работы шагового двигателя когда подача напряжения производится на все обмотки. Момент удержания является одной из характеристик мощности шаговых двигателей.
| Значение тока | S2 |
|---|---|
| 20% | ON |
| 50% | OFF |
Установка выходного тока в рабочем режиме двигателя (вращение) устанавливается с помощью переключателей SW1,SW2,SW3,S1:

| (А) | 0.3 | 0.5 | 0.8 | 1.0 | 1.1 | 1.2 | 1.4 | 1.5 | 1.6 | 1.9 | 2.0 | 2.2 | 2.6 | 3.0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SW1 | OFF | OFF | OFF | OFF | OFF | ON | OFF | ON | ON | ON | ON | ON | ON | ON |
| SW2 | OFF | OFF | ON | ON | ON | OFF | ON | OFF | OFF | ON | OFF | ON | ON | ON |
| SW3 | ON | ON | OFF | OFF | ON | OFF | ON | ON | OFF | OFF | ON | ON | OFF | ON |
| S1 | ON | OFF | ON | OFF | ON | ON | OFF | ON | OFF | ON | OFF | ON | OFF | OFF |
Из-за разности параметров двигателей и их режимов возникает необходимость коррекции формы дискретных импульсов для приближения их к синусоиде. И в драйвере есть такая возможность.
Decay - параметр, который описывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) - Decay = 0%, для треугольного - Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации.

| % | S5 | S6 |
|---|---|---|
| 0 | OFF | OFF |
| 25 | ON | OFF |
| 50 | OFF | ON |
| 100 | ON | ON |
Подключение силовых цепей:
При подключении шаговых двигателей к драйверу допускается как паралельное, так и последовательное включение. Единственное что необходимо учесть - для паралельного включения выходной ток драйвера необходимо устанавливать выше, а при включении последовательном достаточным будет ток как для одного двигателя.

Опять я, к вам со своими обзорами, по ЧПУ.
Ну мало ли, может кому и интересно будет, про ЧПУ строение.
Для начала кто не знает, или просто знает такие слова, как контролер, драйвер и опторазвязка. В чем их отличие?
Контролер, есть универсальный, на несколько осей, обычно под небольшие токи, на нем и опторазвязку обычно ставят, релюхи всякие и т.д. и т.п.
Универсальный стоит подороже и если что полетит, то трудней причину искать будет.
Есть более простой контролер, там отсутствуют драйвера. Так как двигатели могут разной мощности быть, ну и под них разные драйвера. Так же на осях различных могут шаговые движки разные стоять. На разный ток.
То есть драйвер. самый нам нужный, чтобы ШД управлять. Там обычно перемычками, переключателями мы и выставляем ток и микрошаг для ШД.
Сейчас драйвера идут почти сплошь, уже с оптронами, то есть с опторазвязкой.
Но кто не знает, по привычке покупает, контролер с опторазвязкой на нем, а к ним уже драйвера подключает.
Я тоже кстати сглупил, заказал такой. Он по хорошему не сильно то и нужен.
Раб. поле я свое знаю, поэтому детали сразу под него разрабатываю. Конечники не сильно и нужны. Включение шпинделя, мне тоже как то не нужно.
Кто его знает, глюканет там контролер и пока я фрезу на мощном фрезере меняю, он возьмет и включится. Пальцы как с куста, улетят.
В общем теории немного, вам дал. Еще немного схемотехники по подключению драйверов на порты.
Есть 2 такие основные схемы подключения.
Китайцы в основном как один первую советуют. Но она не всегда срабатывает.
Я уже писал обзор покупки TB6600, а на самом деле там оказалась TB67S109AFTG. Микруха намного мелкоскопичней чем первая.
И по даташиту вроде как более слабая по току.
Обзор мой здесь mysku.club/blog/aliexpress/41551.html
Там подробно вроде всё обсудили. Поэтому после него я опять заказал драйвера на TB6600, где уже наглядно на фото видно, что стоит именно эта микруха.
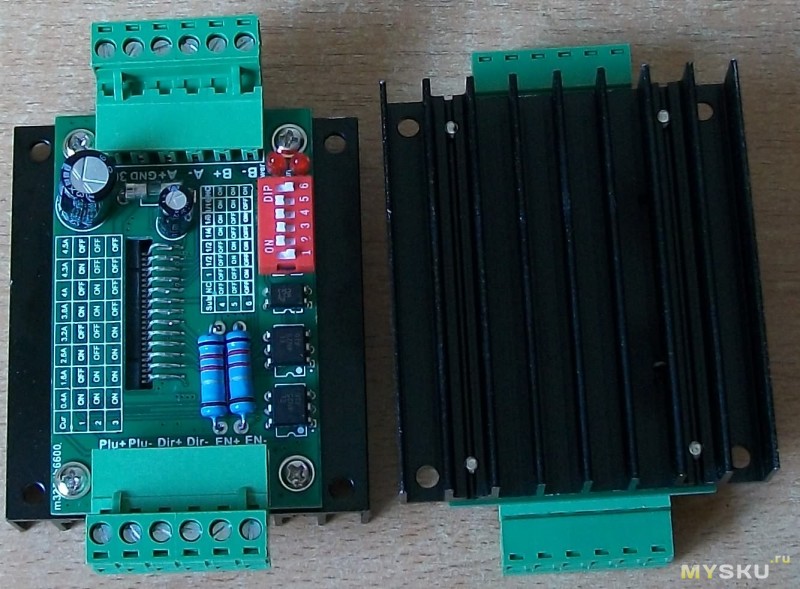
Также выбирал, чтобы ток перемеником не накручивать, а то ошибка и спалить можно. Так как есть и такого исполнения, они немного подешевле будут.
А есть закрытого типа, они подороже. Ну и радиатор там помощней.
В общем описываю, что я заказал и получил.
Продавец хороший, быстро отправил и через пару недель, получил на почте, хотя вроде по деньгам и недорого. Был нормальный трек, который всю дорогу бился.
Границу как по маслу проскочил, а также таможню Екатеринбург. Даже удивительно, обычно там «черная яма». Видно от трека зависит.

Пришло в сером пакете, хорошо замотанным скотчем, упаковкой с пупырушками и сами драйвера в картонных коробках, без всяких надписей. Картон хороший.
Сами драйвера, неплохо выполненные. Пайка приличная. Емкость немного кривовато стояло на одном. Не стал выправлять.
Термопасты под TB6600 тоже не пожалели, даже с лишком, ваткой лишнее убрал с боков.
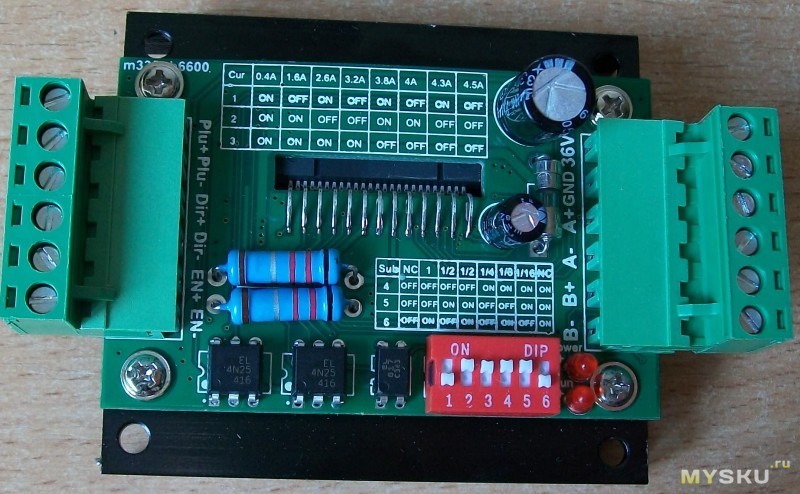
Для любителей рассматривать детали еще вид, крупно. Там и таблица переключателей, чтобы получать различные микрошаги и токи на драйвере.
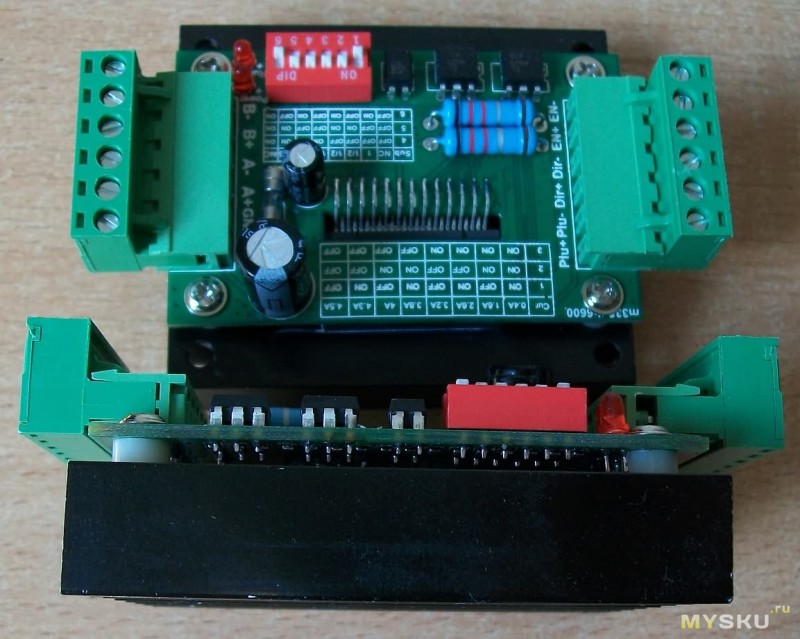
Ну и еще пару вам видов с боку.
Думаю по самой железке теперь у вас представление есть.
Теорию всё могут и по обзору предыдущему посмотреть и по Инет детали.
Но практика как оказалась, совсем другую картину дает.
Во первых по первым мной заказанным драйверам на TB67S109AFTG, схема подключения которые китайцы дают. То есть вверху №1 Не работает.
Мучился, что только не делал и с подключением и настройками в Масн.
Крутила зараза лишь в одну сторону. Пока не подключил по схеме №2.
Тогда всё стало на свои места и заработало как положено.
Единственно опасаюсь на драйвере ток больше 2.6А давать. Хотя схему охлаждения по своему переделал. Заводская совсем не вдохновила.
Так вот сегодня пробывал и первые драйвера и вторые, на одних и тех же режимах. То есть ток 2.6А и микрошаг 1/16
И здесь все теории и даташиты к чертям просто полетели.
Первый заказанный драйвер, просто шуршит осями. А вот второй на оригинальной TB6600 скрип, дерганье какое то. Чувствуется, что движок как бы рывками крутит.
Вот вам и Термобутерброд. Он то оказался намного лучше.
Конечно ещё нужно поэксперементировать. Но уже видно. Так как перекидывал оси, один шепчет, другой скрипит.
Вот такие пироги. Всем Долгих лет жизни и удачи.
Спрашиваем не стесняемся. Любители минусовать, имейте все же хоть немного совести, прежде чем по кнопке тыкать.
Предупреждение тем кто будет покупать вообще драйвера.
Не знаю почему, но обычно драйвера когда получаете, выставлены на максимальные токи. Поэтому, если не глянете, и быстро подключите движок, то можете Джина получить в виде дымка.
Также переключатели, смотря какого исполнения, совсем не у всех ON вверху находиться, у некоторых наоборот вниз нужно переключить.
Будьте Внимательны. Джин не дремлит.

Читайте также: