
Драйвер h2 2206 выходить ошибка err 020 leadshine servo
Здравствуйте. Пользуется ли кто нибудь таким двигателем?
Хочу поставить на ось "зет". Сейчас стоит обычный шаговый на 35 кг. Может работать недель без пропусков, потом два три подряд. Как я заметил пропуски появляются на моделях где много почти вертикальных перепадов. Уменьшал ускорение до 200, не помогает. Все заземлено, ось подпружинена, стоит ШВП. Надоело уже. Может такой двигатель меня спасет?
А почему на двигатель грешите?
Есть основания?
Чаще всего в пропуске шагов виновата силовая электроника.
Какой драйвер у вас стоит?
Как выполнена силовая разводка?
Сделано ли заземление?
Блок питания исправен? Не проседает при большом токе?
С чего получаете управляющие импульсы? С порта? Напрямую?
Есть гальваноразделители?
Чаще всего в пропуске шагов виновата силовая электроника.
Какой драйвер у вас стоит?
Как выполнена силовая разводка?
Сделано ли заземление?
Блок питания исправен? Не проседает при большом токе?
С чего получаете управляющие импульсы? С порта? Напрямую?
Есть гальваноразделители?
Драйвер
Разводка витыми парами в заземленной оплетке.
БП трансформатор 1кВт, 50В.
Управление МАЧ, ЛТП порт, плата опторозвязки.
Другие оси работают нормально.
Я подумал будет проще взять такой двигатель, чем бесконечно искать проблемы. Хотя с другой стороны, если проблема не в двигателе, то я рискую получить тот же результат.
Двигатель что сейчас стоит брал на тао бао. Точно не помню характеристик, но кажется индуктивность обмоток была довольно большая, да и двигатель не самый дорогой. Тогда не очень плавал в этом вопросе. Да и сейчас тоже.
Здравствуйте. Пользуется ли кто нибудь таким двигателем?
Смотрел на этом сайте вот этот, но у них нет доставки в Украину.
Драйвер
Разводка витыми парами в заземленной оплетке.
БП трансформатор 1кВт, 50В.
Управление МАЧ, ЛТП порт, плата опторозвязки.
Вроде не к чему прикопаться. Все грамотно сделано.
Давайте рассудим так.
Сколько у вас градусов на шаг? 200? Деление шага? Шаг ШВП?
Это я к тому, чтобы посчитать смещение от пропуска "пары" шагов.
Заметили бы его, если бы это была действительно пара?
Посчитайте, пожалуйста.
Если вы визуально замечали смещение, значит, это была не пара шагов, а много больше.
Далее. Пропуски шагов приводят к тому, что в результате ось Зет опускается? Поднимается?
Попробуйте написать тестовую программку для шатания оси Зет вверх-вниз минут на 10-15.
Потом сравните положение оси до и после. Уходит или нет.
Дополните программу одновременным движением по другим осям.
Ситуация изменится?
Замените драйвер на соседний. Они у вас одинаковы, так что там только фишки перекинуть,
и, возможно, свитчики попереключать.
Исключится из причин драйвер, по крайней мере.
Если вы визуально замечали смещение, значит, это была не пара шагов, а много больше.
Смещение может быть и на 5-10мм. Это уже больше похоже на срыв а не пропуск шагов.
Далее. Пропуски шагов приводят к тому, что в результате ось Зет опускается? Поднимается?
Бывает по разному. У меня ось уравновешена двумя пружинами. Но масса шпинделя все же остается.
Станок делал, так на всякий случай, особо сильно в него не вкладывался (у меня столярная мастерская). Теперь появилась возможность его загрузить работой (3д резка). Режу на скорости 3-3,5м/мин, на меньшей скорости срывов не было. Все упирается в зет. Не часто но бывают. Не охота замедлять станок. Или может для начала попробовать сменить шаговик.
Ну если просто есть желание сменить шаговик - смените.
Вам решать. Но мне кажется. если на скорости ниже срывов нет - движок непричастен.
Просто пропуски - их на слух отлично слышно.
Давайте попробуем пойти дальше.
Управляющая программа какая? Мач?
Ядро 25 кГц?
Давайте посчитаем частоту выходных импульсов.
Если она близка к чстоте ядра - может и УП быть виноватой.
Сможете посчитать частоту выходных импульсов?
Да, когда пропуск слышно "рычание "
Микрошаг 1/8, 440 имп./мм, максимальная скорость 30 мм /сек
30*440 13200 гц.
Лишних денег у меня особо нет, но хочеться подойти к станку и увидеть что там все ОК
Да. и тут не подкопаешься.
Еще вариант.
А не подклинивает ли у вас ШВП по Зет?
Тогда при большой скорости будут пропуски.
Где-то тут на форуме была ветка по подклинке оси.
И там тоже при разных скоростных режимах это проявлялось.
"Шаговые двигатели с энкодером Leadshine."
Вы уверены что Мачь позволит подключить энкодер? Насколько помнится нет. А на К-Флоп денежек много нужно. Лучше разберитесь со своим шаговиком. Промерьте сопротивление, определите какое нужно напряжение для него, есть формула. Если драйвер позволяет поднять - поднимите питание. Наконец поиграйтесь с делением шага в настройках. Отключите двигатель проверьте плавность хода проблемной оси.
Вы уверены что Мачь позволит подключить энкодер? Насколько помнится нет. А на К-Флоп денежек много нужно.
На сколько я понял этим занимается драйвер Leadshine HBS57.
Драйвер серво-шагового двигателя (шагового двигателя с энкодером) 50В/8.2А/200кГц. Оптоизолированные входы управления STEP, DIR, ENABLE. Выбор режима работы STEP/DIR или CW/CCW. Настройка драйвера с ПК через RS232, автонастройка под ШД. Защита от КЗ обмоток ШД, от обратной ЭДС ШД, режим удержания ротора ШД. Совместим с ШД 573S20-EC-1000.
Роман С возразить нечего. Незнаю таких железок. По описанию должен не пропускать шаги. Вроде 30% обещают усилие на больших оборотах прибавить.
Попробуете - расскажите. Будет что понастраивать в долгие зимние вечера.
Вроде 30% обещают усилие на больших оборотах прибавить
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
Что-то сайт ледшайна не открывается.
Графики, наверное, указаны при 100 % токе, а драйверы HBS изменяют ток в зависимости от нагрузки. Учитывая, что крутящий момент прямом пропорционален рабочему току - скорее всего так и есть - больший крутящий момент при тех же габаритах.
Другой вопрос в том - что будет при высоких скоростях, когда из за недостаточного напряжения питания драйвер просто не может поднять ток до требуемого значения, и тут уже не получится поднять ток не снижая скорости.
Тут уже энкодер поможет только тем, что двигатель сделает все возможное, чтобы как можно быстрее догнать на требуемую позицию. Т.е. вместо пропуска шагов при высокой нагрузке и скорости возможно некоторое кратковременное отставание без сбоев и потери координат.
Как я заметил пропуски появляются на моделях где много почти вертикальных перепадов. Уменьшал ускорение до 200, не помогает.
Очень похоже на недостаточную длину буфера предпросмотра в Mach3 (LookAhead).
По умолчанию там стоит 20 строк. Для рельефов этого явно мало - нужно как минимум 100, а можно и 200 установить.
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
Я не собираюсь выжимать из него максимум, просто нужно чтоб не пропускал шаги.
Не совсем понимаю что он говорит, но мне кажется что это примерно то что я ищу.
Отредактировано Роман С (01-02-2014 11:42:15)
"Шаговые двигатели с энкодером Leadshine."
Купил себе такие, поставил и был глубоко разочарован. Тот факт, что энкодер не допускает пропуска шагов,- это плюс, ну и скорость прибавилась.
На этом все. А главная проблема остается. Примером, клинит одна ось, вырубается драйвер, а другие продолжают дальше работать и портить заготовку. Абсурд.
Неужели не предусмотрен связь между всеми драйверами, чтобы при аварии все остановились, или, еще лучше, чтобы была обратная связь с пультом управления
(у меня DDCSV1.1). Или я что то не понимаю!?
Прошу специалистов, помогите разобраться, как остановить полностью выполнение программы при аварийном отключении одного из драйверов. ПЛЗ
Тарас К
А в чём проблема выход FAULT завести на E-STOP. (или выход ALARM в зависимости от модели драйвера).
Судя по схеме производителя там на выходе оптопара и соответственно все драйвера можно параллельно подключить на E-STOP.
Отредактировано Kachik (27-02-2018 00:42:47)
А главная проблема остается. Примером, клинит одна ось, вырубается драйвер, а другие продолжают дальше работать и портить заготовку. Абсурд.
Каждый элемент системы свое отрабатывает!
Драйвер работает согласно описанию.
И DDCSV1.1 не имеет обратной связи по положению.
Это глубоко бюджетный контроллер.
У меня такой стоит и прекрасно работает.
Разложим вашу проблему на составляющие.
1. У этого контроллера есть "выносные кнопки". В мануале это все расписано.
Никто не запретил некий внешний сигнал через гальваноразделительное реле применить к сигналу "пауза". В состоянии "пауза" у вас еще автоматом и фрезу поднимет над материалом.
Что будет служить этим внешним аварийным сигналом?
Да что угодно! Да хоть температура охлаждающей жидкости в шпинделе!
Или, например, как в вашем случае, выход с драйверов сигнала "Авария".
Если есть разъем в таким сигналом - хорошо.
Если такового нет - можно взять его хоть со светодиода прямо.
2. Решение проблемы с заклиниванием оси и выходом драйвера в аварию или чем-либо подобным еще.
Наличие подобной ситуации на станке - это нонсенс!
Тут надо просто упереться и эту тему решить.
Найти причину и устранить.
Делать работу на потенциально неисправном станке - это плохой подход.


As a middle product between servo and stepping, leadshine hybrid servo is widely used on machines like cnc wood router , multi head cnc router , atc cnc router , 4 axis cnc router and cnc wood turning machine . Hybrid servo is also outfitted with encoder like the AC servo. And when it find any fault, the error code will show on the driver. Here we are going to talk something regarding leadshine ( leadshine h2-758, leadshine hbs758s, leadshine h2-2206 ) error code ER020. Sincerely hope this article can help you.
What can cause code ER020 appear? And how to solve it?
1. Phase Failure due to motor cable get loose
Troubleshooting: please get the cables well connected again
2. Encoder Failure due to encoder cable get loose
Troubleshooting: please get the cables well connected again
3. Position Error caused by follow reasons:
3.1 Limit sensor failure
Troubleshooting: please replace a new sensor with cable, or adjust the distance between sensor and steel chip.
3.2 Signal interfere
Troubleshooting: please clear the interfere
3.3 Ground protection failure
Troubleshooting: please do grounding correctly
3.4 Motor cable with open circuit
Troubleshooting: please repair the open circuit
3.5 The timing belts get loose
Troubleshooting: please fasten the belt properly
3.6 Wrong subdivision
Troubleshooting: please set it correctly
3.7 Wrong pulse direction
Troubleshooting: please set it correctly
4. Tracing error out of tolerance caused by below:
4.1 Wrong wiring on encoder
Troubleshooting: please wire encoder correctly
4.2 Wrong order of motor phase wiring
Troubleshooting: please correct the order of phase wiring
4.3 Encoder broken
Troubleshooting: please replace a new motor
4.4 Driver broken
Troubleshooting: please replace a new driver
Our technical support team is ready to serve you, please feel free to contact us if you need any assistance.
Есть 2 станка: 900х900, на обоих мач3. Было искажение геометрии при резки окружностей и сглаживание рельефа при 3Д обработке. Попробовали один станок перевести на DSP пульт, все задышало-заработало, но проблема осталась ровно таже с точностью до. Фото тестовых запилов прилагаю. Следовательно проблема может быть:
Люфтов нет, при замере погрешности при смене направления движения оси, погрешность максимум 5 соток. Драйвера стоят leadshine ACS806, сервы leadshine BLM57130-1000. УП из под арткама , постпроцессор RZNC-0501(на других проблема таже). Станок по ху серво через редуктов+зубчатая рейка.
Куда копать? Настройки драйверов? косяки серв?
Прикрепленные изображения
Сделай круг на маленькой скорости, 200мм/мин к примеру.
? Направления осей на изделии.
Ставлю на сервы.
Сделай круг на маленькой скорости, 200мм/мин к примеру.
Скорость не влияет никак, ставили и минимальную и максимальную, повторяемость стабильная
? Направления осей на изделии.
первые 2 фото х горизонталь, у вертикаль
Ставлю на сервы.
А что может быть не так с сервами? тупо то что они сервы? т.е. замена на новые такие же ситуацию не спасет?
А что может быть не так с сервами? тупо то что они сервы? т.е. замена на новые такие же ситуацию не спасет?
С сервами может быть все не просто.
Сервы не любят минимальные люфты, ибо надо загрублять чувствительность энкодера. Но когда загрубляем энкодер - получаем искажение геометрии. Если не загрубляем энкодер - получаем вечные ошибки.
Если стоят маломощные сервы - то на скорости тяжелая балка пролетает мимо нужного значения - а энкодер пытается вернуть обратно. Опять получаем говно. Редуктор для серв надо не менее 1:10, иначе тоже самое получается. Ремни вытянулись - тоже херня.
И там еще туева хуча параметров, кривые разгона и т.п.
Сервы любят подготовленный разум :-)
в сервоприводах как-бы ПИД-ы надобно настраивать, ибо с заводскими настройками "жесткости " в них явно недостаточно.
Сделанное правильно — красиво. Если сделанное тебе не нравится — то и работать оно будет хреново. Перевари, пересверли, выпили заново — ну, или хотя бы покрась.

Как известно, драйверы шаговых двигателей компании Leadshine серий AM, EM и DM обладают рядом уникальных функций.
Однако, чтобы воспользоваться преимуществами этих функций в полной мере, драйверы необходимо настроить. Выполняется настройка с помощью специального фирменного ПО - ProTuner. Для настройки потребуется компьютер под управлением Windows, оснащенный COM-портом, а также кабель Leadshine RS232-RJ12.
Подключаем драйвер к COM-порту компьютера с помощью кабеля, устанавливаем ProTuner на компьютер, подаем питание на драйвер.
После запуска ProTuner будет предложено выбрать COM-порт для установки связи с драйвером. Номер порта можно посмотреть в диспетчере устройств:
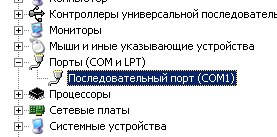
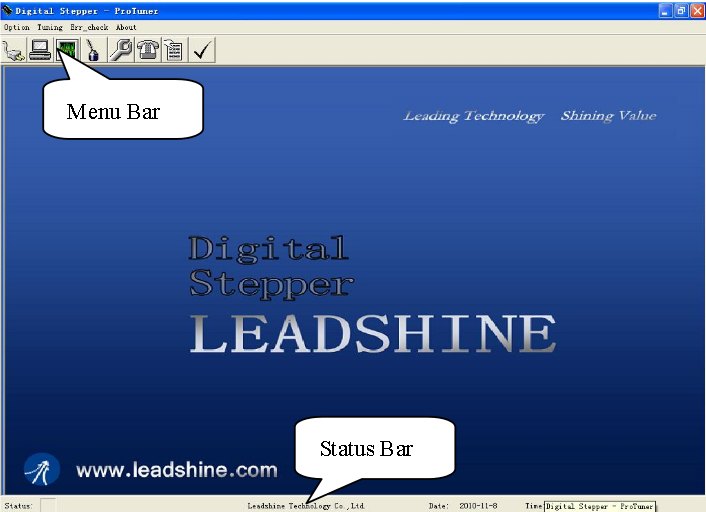
После успешного запуска будет показано основное меню ProTuner:
Настройка контура регулирования обмоток шагового двигателя
Настройка драйвера начинается с пункта меню Tuning, где настраиваются параметры ПИ-регулятора уровня тока в обмотках двигателя. На графике отражается изменение тока во времени, оранжевая линия показывает эталонный уровень тока, зеленый - реальный ток. В идеале график должен быть правильной прямоугольной формы. Значение I-test задает требуемый уровень тока - он должен быть равен рабочему току обмоток двигателей.
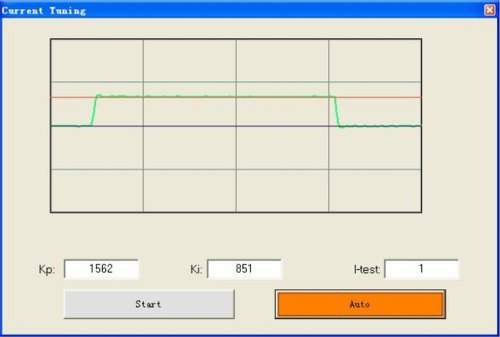
Настройка ПИ-регулятора заключается в подборе двух параметров - пропорционального Kp и интегрального Ki.
Пропорциональный коэффициент Kp соответствует названию - результат его влияния в том, что чем больше разница между нужным уровнем тока и реальным током обмотки, тем быстрее происходит изменение тока драйвером. Большие значения пропорционального коэффициента приводят к возникновению колебаний в регулируемом процессе.
Интегральный коэффициент обладает сглаживающим эффектом, и устраняет т.н. статическую ошибку. Слишком малые значения Ki приводят к тому, что статическая ошибка не компенсируется до конца, слишком большие значения приводят к тому, что уровень тока "плавает" вокруг необходимого значения.
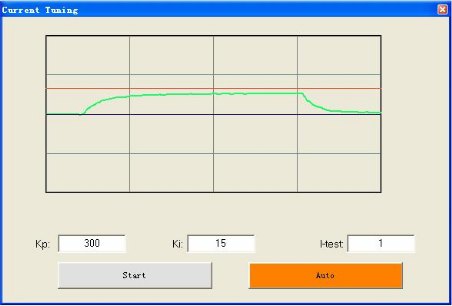
Ниже пример неудачно настроенного контура. Слишком маленький пропорциональный коэффициент Kp привел к тому, что ток слишком медленно меняется, причем скорость изменения падает по мере приближения к заданному уровню, а интегральный коэффициент Ki=15 оказался недостаточен для компенсации статической ошибки - в результате ток так и не достигает нужного уровня за шаг.
Можно также воспользоваться функцией автоматического подбора параметров, нажав кнопку Auto. При этом драйвер самостоятельно протестирует обмотки и выберет подходящие коэффициенты. Именно это происходит при вкл/выкл переключателя SW4(см. документацию на AM882).
Примечание. Производитель рекомендует настраивать параметры на ненагруженном двигателе.
Настройка основных параметров драйвера
После настройки контура тока можно перейти к настройке продвинутых функций драйверов Leadshine. Они настраиваются в окне System Config:
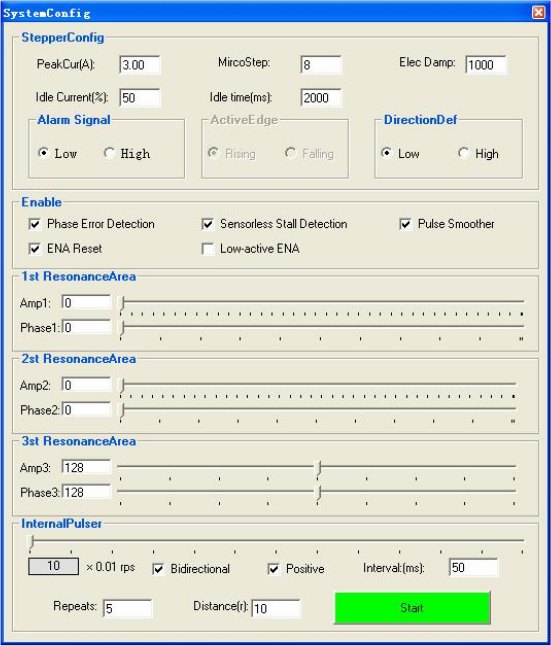
PeakCur(A) - пиковый ток в обмотке шагового двигателя. Обратите внимание, что производителями ШД указывается среднеквадратичное значение тока!
Microstep - если DIP-переключатели установлены нужным образом(см. документацию на драйвер), можно задать точное деление шага с помощью этого параметра.
Elec Damp - "коэффициент электронного демпфирования". Данное число используется как некий коэффициент в антирезонансных алгоритмах. Алгоритмы подавления резонанса Leadshine держатся в секрете, поэтому точное назначение параметра неизвестно, однако известно, что данный коэффициент полезен при устранении вибраций, а также есть рекомендация производителя - сперва настроить коэффициенты 3 резонансных областей со значением коэффициента по умолчанию, прежде чем переходить к подбору Elec Damp - возможно, подбор не потребуется.
Idle Current - величина тока удержания(при простое мотора) в % от рабочего тока.
Idle time - время простоя мотора, после истечения которого ток снижается до уровня, заданного предыдущим параметром.
Phase Error Detection - задает, будет ли драйвер диагностировать ошибки, связанные с функционированием обмоток мотора и выдавать сигнал аварии. Лучше всегда оставлять включенным.
Sensorless stall detection - функция определения момента остановки вала двигателя. При включенной функции драйвер постарается определить, когда произошел внезапный останов вала(вал заклинило или он остановился по другой причине, например из-за пропуска шагов) и выдаст сигнал аварии на выход ALM. Отключать данную функцию стоит только если есть подозрения на ложные срабатывания, а также если не планируется использовать выход аварии драйвера для остановки всего станка.
ENA Reset - при установленной галочке драйвер можно вывести из состояния "авария" без выключения питания, с помощью снятия-подачи сигнала ENABLE.
Low-active ENA - данная функция инвертирует уровень сигнала ENABLE. Аналогично, уровни сигналов ALM и DIR выбираются соответствующими переключателями.
Pulse smoother - алгоритм сглаживания периода поступающих импульсов STEP. Назначение данной функции в том, чтобы немного сгладить негативные эффекты, связанные с нестабильностью входящих импульсов. Так, например, программа Mach3 генерирует сигнал на пинах LPT-порта с крайне большой дисперсией периода импульсов - такая неравномерность очень негативно сказывается на максимально достижимой скорости станка. Однако, данную функцию лучше отключить - работающий фильтр импульсов отключает мультистеппинг. Это особенность всех драйверов Leadshine, не является ошибкой, а осознанным решением производителя. Польза от мультистеппинга видится гораздо большей, чем от фильтра импульсов по той причине, что неравномерность STEP, генерируемых Mach3 настолько велика, что её не сгладить никаким фильтром, а вибрации ШД на низких частотах - очень серьезная проблема, которая почти полностью устраняется мультистеппингом:
Настройка параметров резонансных областей
В драйверах Leadshine AM,EM и DM выделены 3 диапазона скорости вращения ШД, в которых наиболее вероятно возникновение вибраций. Для их устранения предоставляется возможность настройки 2 параметров для каждой области - коррекция соотношения амплитуды тока обмоток и сдвиг фаз. Порядок настройки не регламентируется производителем, даются лишь несколько рекомендаций:
1) Производить настройку на ненагруженном моторе(без подсоединения приводного винта/ремня)
2) Все подстройки ползунками производить на предварительно четко выделенной резонансной частоте вращения.
Ниже описана методика, предлагаемая Михаилом Юровым.
С помощью встроенного генератора импульсов двигатель раскручивается до появления вибрации (первая резонансная область соответствует скорости примерно 0.5-1.2 об/сек, вторая - 1.2-2.5 об/сек, третья 2.5-5 об/сек.)
Ползунок амплитуды перемещается таким образом, чтобы добиться максимальной вибрации, после чего легко подобрать частоту наибольшего резонанса. Зафиксировав частоту, используя ползунки коррекции амплитуды и сдвига фаз добиться максимально плавного движения(хотя бы на слух). После настройки на данной частоте - скорость вращения увеличивается до проявления вибрации в следующей области.
В современных ноутах нет порта RS-232, поэтому приобретение фирменного кабеля для меня лично было лишено всякого смысла. Да и лень было ждать, пока разбомбят Воронеж.
В общем, купил преобразователь интерфейса USB-RS232.

Думал разрезать сетевой патч-корд c разъемом RJ-45 и свободный конец завезти в преобразователь. Разрезал, соединил. класс. Однако не лезет RJ-45 джек в DM-556, потому что в LEADSHINE стоит 6-пиновая розетка RJ-25. Найти сейчас экзотичные 6-пиновые разъемы проблематично, поэтому пришлось взять телефонный патч-корд RJ-14 (4 пина). Не думаю, что на такой частоте хоть как-то проявляется отсутствие скрутки в "лапше". Собственно говоря, на этом и можно было бы и завершить, если бы не одно но -- не работает. Никак. Полдня перетыкал и переустанавливал драйвера. Никак. А потом подключил анализатор. Ой бл& где тут смайлик :facepalm:
В схеме разделки кабеля LEADSHINE перепутаны сигнальные линии. После того, как поменял местами Rx и Tx -- все заработало.
Теперь вот сижу и учу пиджин-инглиш. Неужели сложно им было нанять носителя языка или просто грамотного инженера? Я 15 раз прочел процедуру настройки и так и не понял -- как настраивать резонансные частоты. Разработчики предлагают слегка двигать регулятор частоты. Это регулятор частоты внутреннего генератора? Но программа не реагирует на регулировку, пока не нажмешь стоп. В общем -- не дайте мне убиться об стенку, спасите ПЖЛ -- объясните процедуру максимально подробно.
Вы уж отпишитесь потом как получится - такие же жду Не смотрели инструкции для 442, 856 ? Я видел на русском, железо думаю аналогичное.
по моему видел на какой то еще из этой серии, но сходу не нашел
аа блин. там этого нет ? черт, недоинструкция
протюнер по сути одинаков для всех драйверов, а пляски с научным тыком в коэффициенты нас только специфическое занятие, что я вынес его описание в отдельную уже указанную здесь статью.
протюнер по сути одинаков для всех драйверов, а пляски с научным тыком в коэффициенты нас только специфическое занятие, что я вынес его описание в отдельную уже указанную здесь статью.
О, вы-то мне как раз и нужны.
1. Протюнер сильно отличается для разных моделей драйверов -- там даже разные экзешники вызываются при выборе разных драйверов. Еще более интересно то, что при вызове DM556 ver1.0 все работает, DM556 ver.2.0 внутренний генератор мотор вращает, но при этом ругается на отсутствие связи по COM-порту.
2. Спасибо вам за расшифровку параметра I-test -- в описании DM556 об его назначении нет ни слова.
3. Я случайно обнаружил, что менять частоту импульсов гораздо удобнее стрелка вправо -- стрелка влево. Но все равно непонятно, почему при этом приходится нажимать СТОП.
4. С резонансом по-прежнему непонятки. Вроде бы что-то услышал в диапазоне 70-75 (0.7-0.75Hz) Но изменение параметра амплитуды меняет тон, однако звук не исчезает.
5. Непонятно вообще, какой выставлять ток драйвера. Производитель шагового двигателя пишет ток обмотки 2.8А. Насколько я понимаю, это среднеквадратичное значение и его нужно умножить на SQRT(2), т.е. получаем 3.96A. Я взял квадратный корень из двойки потому, что предполагаю импульсы тока в виде меандра с коэффициентом заполнения 2. Так ли это на самом деле?
6. При 30 об/с шаговик уже начинает попискивать и иногда застревать. Исчезнет ли пропуск шагов, если я увеличу ток до 5А -- или без толку? Температура двигателя сейчас не поднимается выше 45С.
Читайте также: