
Что такое драйвер для чпу
Ответ: Шаговые двигатели - это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
Вопрос: Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции: - Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи - поворот ротора зависит от числа поданных импульсов на устройство управления; - высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; - хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; - обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; - работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки - шаговый двигатель подвержен резонансу; - может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе - низкая удельная мощность шагового привода; - потребляемая энергия не уменьшается при отсутствии нагрузки; - малый момент на высоких скоростях;
Вопрос: Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей - гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный - имеет четыре выхода, содержит в себе две обмотки. б)Униполярный - имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный - имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы - получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
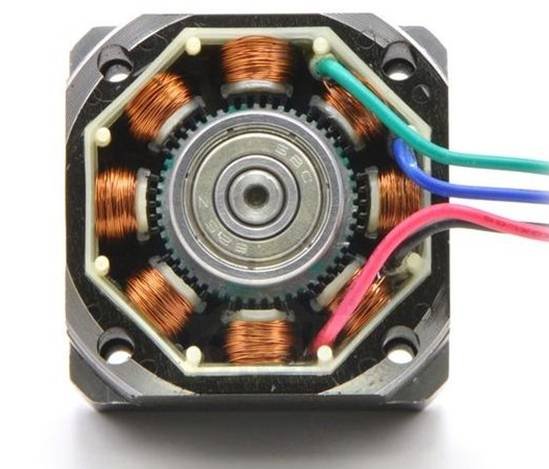
Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
Вопрос: Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Вопрос: Как можно повысить точность вращения вала шагового двигателя?
Вопрос: Что означают характеристики шагового двигателя - ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную - кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания - пиковое значение крутящего момента двигателя - зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Вопрос: Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше - большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б - двигатели разного размера, смотрите кривую зависимости момента от скорости - чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
Вопрос: Что такое драйвер управления шаговым двигателем?
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ.
Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя - драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L - индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя - 4.2 А, ток, выдаваемый драйвером - до 5А, первое условия выполнено. Индуктивность двигателя - 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера - 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
Вопрос: У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её "не терпит рука", тогда как нагрев в 80 градусов - нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов - беспокоиться не стоит. Если больше - первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ - установить на корпус ШД радиатор и/или вентилятор.
Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов - самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:

Если вам интересно, какой драйвер шагового двигателя выбрать для сборки станка с ЧПУ или заменить существующий драйвер шагового двигателя в вашем ЧПУ, то это руководство поможет вам.
В идеале вам нужно, чтобы драйвер мог управлять вашим шаговым двигателем без чрезмерного нагрева или шума. Вы также не захотите покупать слишком дорогой шаговый драйвер, когда используете относительно небольшой шаговый двигатель.
Я написал это руководство после рассмотрения нескольких вариантов шагового драйвера и использования многих из них в своей личной мастерской.
Обратите внимание, что драйвер шагового двигателя также называется контроллером двигателя и используется в данном руководстве как синонимы.
Это руководство разделено на разделы, в которых я перехожу от шаговых драйверов с самыми низкими значениями пикового тока к самым высоким.
Чтобы максимально использовать этот обзор, вы должны знать либо максимальный номинальный ток на вашем шаговом двигателе, либо при каком токе вы планируете запускать двигатель в соответствии с требованиями к крутящему моменту и частоте вращения.
Мой лучший выбор — это драйвер шагового двигателя DM542T, который представляет собой мощный, но доступный шаговый драйвер, который подойдет практически для любого приложения ЧПУ.
Вот лучшие драйверы шагового двигателя, доступные сегодня для приложений ЧПУ:
| Шаговый драйвер | Пиковый ток |
| 1. Драйвер шагового двигателя A4988 | 1А (2А с охлаждением) |
| 2. Драйвер шагового двигателя DRV8825 | 1,5 А (2,2 А с охлаждением) |
| 3. Драйвер шагового двигателя DM542T | 4,2 А |
| 4. Драйвер шагового двигателя TB6600 | 4,0 А |
| 5. Драйвер шагового двигателя DM556T | 5.6 A |
| 6. Драйвер шагового двигателя DM860T | 7,2 А |
Драйвер шагового двигателя A4988
Шаговый драйвер A4988 — один из самых популярных на рынке небольших шаговых драйверов с ЧПУ.
Этот шаговый драйвер можно найти во многих бюджетных контроллерах ЧПУ и настольных ЧПУ. Настольный CNC 3018 использует его в качестве шагового драйвера.
Код A4988 представляет собой номер модели шаговой ИС, произведенной Texas Instruments.
Эта ИС была впервые использована на коммутационной плате и преобразована в практически пригодный для использования шаговый драйвер компанией Pololu Robotics.
Позже его клонировали многие китайские производители, и в настоящее время он продается по очень доступной цене.
Вероятно, это самый дешевый вариант шагового драйвера.
A4988 может подавать ток 1 А на шаговый двигатель без радиатора. С дополнительным большим радиатором и принудительным воздушным охлаждением этот драйвер технически может обеспечивать ток до 2 А.
Однако, на самом деле, вам следует ожидать, что с этим драйвером на шаговый двигатель будет подаваться ток до 1 А, если вы не хотите рискнуть его поджарить.
Что это значит для шаговых двигателей? Это означает, что A4988 может очень хорошо работать с NEMA 14 с током менее 1 А.
Он также может работать с небольшими двигателями NEMA 17 с номинальным током до 1,5 А. Хотя не рекомендую. Как показывает практика, в идеале вам следует покупать шаговый привод с номинальным током, который в 1,4 раза превышает номинальный ток шагового двигателя.
Если вы не знаете, какие шаговые двигатели выбрать для своего ЧПУ, то это поможет вам — Шаговый двигатель для ЧПУ станка. Какой выбрать?
Этот драйвер используется во многих настольных ЧПУ и 3D-принтерах, поэтому он идеально подходит для такого приложения.
Обратите внимание, что вам нужен один драйвер A4988 для каждого шагового двигателя, который вы используете.
A4988 может делать микрошаги до 1/16 в пятиступенчатых режимах. Очень важно запускать этот шаговый двигатель в микрошаговом режиме, чтобы избежать проблем с резонансом .
Потенциометр в A4988 позволяет легко регулировать ток в соответствии с требованиями вашего шагового двигателя.

Регулировка тока с помощью потенциометра в шаговом драйвере A4988
Для работы этого контроллера двигателя вам потребуется напряжение источника питания в диапазоне 8–35 В. Большинство людей устанавливают напряжение питания 24 В, чтобы обеспечить бесперебойную работу A4988.
В целом, это отличный стартерный шаговый драйвер, который стоит шокирующе недорого.
Драйвер шагового двигателя DRV8825

Драйвер шагового двигателя DRV8825
Драйвер шагового двигателя DRV8825 — еще один небольшой драйвер ЧПУ, который очень популярен в небольших приложениях ЧПУ.
DRV8825 также представляет собой шаговую ИС, произведенную Texas Instruments. Pololu Robotics впервые разместила его на коммутационной доске.
Вы всегда можете купить оригинальный Pololu DRV8825, хотя вам придется заплатить примерно в 5 раз больше за почти незначительное повышение производительности.
Этот драйвер можно назвать обновленной версией драйвера A4988.
Он может выдерживать ток 1,5 А без какого-либо охлаждения и 2,2 А с принудительным воздушным охлаждением и теплоотводом, что является обновлением по сравнению с током 1 А без охлаждения в A4988.
Этот контроллер двигателя с ЧПУ может достаточно хорошо управлять двигателем NEMA 17 на 1,5 А и, очевидно, любым шаговым двигателем меньшего размера.
В то время как A4988 может делать до 1/16 микрошага, DRV8825 может делать до 1/32 микрошага, делая движение двигателя более плавным.
DRV8825 поставляется с алюминиевым радиатором.

Шаговый драйвер DRV8825
DRV8825 — это замена драйверов A4988 в любой системе ЧПУ. Это потому, что они имеют одинаковый размер, распиновку и интерфейс.
Регулировка тока от драйвера в DRV8825 очень похожа на таковую в A4988, путем регулировки потенциометра.
В целом это обновленный шаговый драйвер A4988, который, как ни странно, стоит почти столько же. Если у вас нет особых причин для приобретения A4988, используйте драйвер шагового двигателя DRV8825.
Драйвер шагового двигателя DM542T

Драйвер шагового двигателя DM542T
DM542T — мой личный фаворит и тот, который я чаще всего использую для своих DIY-приложений с ЧПУ.
Этот шаговый драйвер может приводить в действие почти любой двигатель NEMA 17 и NEMA 23, за исключением, вероятно, NEMA 23 с высоким крутящим моментом с током 4,2 А.
Этот драйвер шагового двигателя — отличный выбор почти для любого другого шагового двигателя в ЧПУ. Я говорю это потому, что NEMA 34 очень редко встречается в ЧПУ.
Это делает драйвер отличным выбором практически для любого проекта DIY с ЧПУ на основе GRBL, включая большие рамы 8 ‘x 4’.
Если вам нужно выбрать контроллер на основе GRBL, который вам нужен для вашего ЧПУ, то это руководство, которое я написал, вероятно, вам поможет — Контроллеры GRBL для ЧПУ для любителей.
Этот контроллер мотора известен своей высокой надежностью и долгим сроком службы. Благодаря микросхеме DM542T, этот продукт отличается высочайшим качеством. Теплоотвод и охлаждение этого мотора превосходны. Это очень тихий драйвер, он не напрягается даже при 4А.
Одной из приятных особенностей этого двигателя является отличная система плавного пуска. Шаговые двигатели без этого потребляют большой ток, когда они изначально запитаны.
Это вызывает резкий скачок в двигателе и значительно сокращает срок его службы.
DM542T смягчает это, регулируя ток и позволяя крутящему моменту увеличиваться постепенно.
Функция антирезонанса DM542T работает так, как рекламируется, и это позволяет избежать любой вибрации и шума в средних диапазонах (в усилителях).
Кроме того, шаговые двигатели обычно нагреваются, когда они не вращаются при подключении к источнику питания.
DM542T имеет функцию уменьшения тока холостого хода, при которой ток падает до половины значения оборотов.
DM542T предлагает микрошаги до 1/128. Но что действительно приятно, так это микрошаговое управление.
Вы можете использовать DIP-переключатели в шаговом двигателе, чтобы легко установить число микрошага из 15 предустановленных режимов (1/2, 1/4, … и так далее до 1/128).
В отличие от предыдущих драйверов шагового двигателя в этом списке, вам не нужно поворачивать потенциометр для регулировки тока.
Подобно микрошаговому управлению, вы можете использовать DIP-переключатели для установки тока из 8 выбираемых пиковых токов (1,00 A, 1,46 A, 1,91 A, 2,37 A, 2,84 A, 3,31 A, 3,76 A, 4,20 A).
Для запуска этого шагового драйвера вам необходимо подать входное напряжение 20-50 В постоянного тока. На всякий случай безопаснее поддерживать верхний предел напряжения питания 45 В постоянного тока.
Как и в случае с большинством шаговых двигателей, при увеличении напряжения питания вы получите более высокий крутящий момент даже при более высоких оборотах.
В целом, это, вероятно, лучший драйвер двигателя 24 В в этом списке.
Обратите внимание, что для запуска 3 двигателей вам потребуется три шаговых драйвера.
Вы не можете запустить несколько двигателей от одного шагового драйвера, так как это одноосные шаговые драйверы.
В последнее время я начал чаще использовать драйвер DM556 это более распространённый, улучшенный аналог DM542T, к сожалению он немного дороже
Драйвер шагового двигателя TB6600

Драйвер TB6600
| Максимум. Текущий | 4А |
| Шаговый двигатель | NEMA 14,17,23 (до 4A) |
| Источник питания | 9-42В |
Драйвер TB6600 — очень популярный драйвер, который чаще всего используется для питания двигателей NEMA 17 и NEMA 23.
Шаговая ИС этого драйвера производится Toshiba. Если быть очень точным, использованный шаговый двигатель — TB67S109A, а не TB6600.
Но по характеристикам аналогичен TB6600.
Он имеет семь предустановленных выходных токов (0,5 А / 1,0 А / 1,5 А / 2,0 А / 2,5 А / 2,8 А / 3,0 А / 3,5 А), которыми можно управлять с помощью шестизначного DIP-переключателя на драйвере.
Максимальный выходной ток, который можно установить с помощью DIP-переключателей, составляет 3,5 А, что ниже теоретического максимального тока 4 А.
На мой взгляд, этот драйвер может хорошо работать, если ваши требования до 3А. Кроме того, он шумит и нагревается.
Как и другие драйверы шагового двигателя для станков с ЧПУ в этом диапазоне, он имеет встроенные функции защиты от перегрузки по току и температуры.
Этот шаговый двигатель имеет пять предустановленных режимов микрошага (1/1, 1/2, 1/4, 1/8, 1/16, 1/32), которыми можно управлять с помощью DIP-переключателей.
Источник питания, который можно использовать для запуска этого шагового двигателя, составляет 9–42 В с рекомендуемым напряжением 12–30 В.
На всякий случай лучше не превышать 30 Вольт.
Большинство пользователей используют этот шаговый двигатель при напряжении 24 В, поскольку они получают нужные обороты и крутящий момент при этом напряжении питания.
По словам производителя, этот шаговый двигатель идеально подходит для достижения целевого крутящего момента 255 унций на дюйм или ниже.
Что мне показалось наиболее интересным в этом шаговом двигателе, так это то, что он предлагает ток не менее 3 А без шума, почти вдвое дешевле, чем DM542T.
Помните, что с этим контроллером мотора или DM542T вам понадобится три таких контроллера для работы трехосного ЧПУ.
Если ваш бюджет ограничен, а требования к току шагового двигателя ниже 3А, я предлагаю вам получить это. В противном случае я предлагаю вам выбрать DM542T или DM556 — улучшенный аналог DM542T.
Драйвер шагового двигателя DM556T

Драйвер шагового двигателя DM556T
Этот шаговый драйвер работает на микросхеме DM556T. Этот драйвер аналогичен интерфейсу DM542T. Однако он может выдерживать пиковый ток 5,6 А.
Это делает этот шаговый двигатель идеальным даже для двигателей NEMA 23 с высоким крутящим моментом (4,2 А) и удерживающим моментом 425 унций на дюйм.
Этот шаговый драйвер подходит практически для всех проектов с ЧПУ, включая большие фрезерные станки с ЧПУ 8 ‘x 4’.
Единственное, что он не может работать, это, вероятно, NEMA 34 с током 6 А и удерживающим моментом более 1000 унций.
Если это ваше требование, я предлагаю вам взглянуть на следующий драйвер шагового двигателя в этом списке.
DM556T обладает отличными антирезонансными характеристиками для обеспечения плавного движения и бесшумной работы.
Подобно DM542T, он имеет DIP-переключатели для выбора из 16 предустановленных разрешений микрошага (до 1/125).
Кроме того, он имеет еще один набор DIP-переключателей, которые вы можете включать и выключать для выбора из 8 предустановленных настроек выходного тока (1,8 А, 2,1 А, 2,7 А, 3,2 А, 3,8 А, 4,3 А, 4,9 А, 5,6 А).

Драйвер шагового двигателя DM556T сбоку
У него есть функция определения тока холостого хода, с помощью которой он вдвое уменьшает выходной ток, если двигатель не работает.
Этот шаговый двигатель почти всегда работает при температуре ниже 60 ° C из-за превосходной технологии теплоотвода в этом драйвере.
Рекомендуемое входное напряжение для этого шагового драйвера составляет 20-50 В постоянного тока.
Я обнаружил, что документация по этому шаговому драйверу достаточно хороша для новичков.
Этот драйвер стоит немного больше, чем DM542T, и отлично подходит для любого ЧПУ с шаговыми двигателями вплоть до NEMA 24.
Драйвер шагового двигателя DM860T

Драйвер шагового двигателя DM860T
Этот шаговый драйвер действительно является гигантским шаговым драйвером в этом списке с точки зрения номинального тока.
Благодаря микросхеме шагового двигателя DM860T этот драйвер может обрабатывать до 7,2 А.
Редко вам это понадобится на станке с ЧПУ DIY, потому что такие усилители требуются только шаговыми двигателями NEMA 34, а они редко встречаются на станках с ЧПУ DIY.
Однако есть некоторые доступные ЧПУ, в которых используются двигатели NEMA 34 (например, ЧПУ) для дополнительной мощности резания во время тяжелых производственных работ.
Вы также найдете эти тяжелые двигатели на оси Z тяжелых настольных фрезеров и некоторых токарных станков.
В этом шаговом драйвере есть несколько мощных антирезонансных функций, которые позволяют ему работать через такие большие двигатели и высокие крутящие моменты.
Вы можете выбрать из шестнадцати предустановленных разрешений микрошага (до 1/256).
Подобно другим драйверам, вы можете использовать DIP-переключатель для выбора из восьми предустановленных пиковых токов (2,40 А, 3,08 А, 3,77 А, 4,45 А, 5,14 А, 5,83 А, 6,52 А, 7,20 А).
При пиковых токах, предлагаемых этим драйвером, и тяжелых двигателях NEMA 34, которые работают на нем, вам понадобится мощный источник питания.
Понятно, что DM860T работает как от источников питания переменного, так и от постоянного тока. Вы можете использовать источники питания в диапазоне 18–80 В переменного тока или 36–110 В постоянного тока для работы этого шагового устройства.
В целом, это мощный драйвер шагового двигателя, который вы должны получить, если у вас высокие требования к току. Есть несколько других брендов, которые предлагают такую мощность, однако они намного дороже.
Ближайшим аналогом DM860T является шаговый драйвер DM870, который почти так же хорош.

Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т.ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций - тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» - внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом - ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.
Шаговый двигатель — двигатель со сложной схемой управления, которому требуется специальное электронное устройство — драйвер.

Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3, LinuxCNC или PureMotion.
Задача драйвера — изменять ток в обмотках как можно более эффективно. Поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т. п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1. Драйверы постоянного напряжения. Эти драйверы подают постоянный уровень напряжения поочередно на обмотки. Результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности. Эти драйверы крайне неэффективны и могут быть использованы только на очень малых скоростях.
2. Двухуровневые драйверы. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны. Помимо прочего, они снижают нагрев двигателей. Их все еще можно иногда встретить в высококлассном оборудовании. Однако такие драйверы поддерживают только режим шага и полушага.
3. Драйверы с ШИМ. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны. Практически все представленные сейчас на рынке драйверы как раз этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижении током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем. Иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Лучше, если частота драйвера будет более 20 кГц. И вообще, чем она больше, тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, в результате шаговые моторы начинают издавать неприятный писк.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные.
Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей. Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
ВЫБОР ДРАЙВЕРА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ
Cила тока
Первый параметр, на который стоит обратить внимание, — это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя.
Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15–40 % больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель. С другой стороны, не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Напряжение питания
Второй момент — это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Существует эмпирическая формула U = 32 * √(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера. U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы PLD86, PLD880.
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристки двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Читайте также: