
1с что такое сау
Гипермаркет знаний>>Информатика>>Информатика 9 класс>>Информатика: Информатика 9 класс. Дополнение к главе 5
Дополнение к главе 5
5.1. Автоматизированные и автоматические системы управления
Основные темы параграфа:
♦ что такое АСУ и что такое САУ;
♦ простые автоматы;
♦ ЦАП - АЦП преобразование;
♦ схема САУ;
♦ управление в режиме реального времени;
♦ контроллеры и микропроцессоры в САУ.
Что такое АСУ и что такое САУ
Компьютеры помогают решать задачи управления в самых разных масштабах: от управления станком или транспортным средством до управления производственным процессом на предприятии или даже целой отраслью экономики государства.
Конечно, поручать компьютеру полностью, без участия человека, руководить предприятием или отраслью экономики сложно, да и не безопасно. Для управления в таком масштабе создаются компьютерные системы, которые называются автоматизированными системами управления (АСУ). Такие системы работают вместе с человеком.
АСУ помогает руководителю получить необходимую информацию для принятия управляющего решения, а также может предложить наиболее оптимальные варианты таких решений. Однако окончательное решение принимает человек.
В АСУ используются самые современные средства информационных технологий: базы данных и экспертные системы, методы математического моделирования, машинная графика и пр.
С распространением персональных компьютеров технической основой АСУ стали компьютерные сети. В рамках одного предприятия это локальные компьютерные сети. Автоматизированные системы управления, работающие в масштабах отрасли, в государственных масштабах, используют глобальные компьютерные сети.
Другим вариантом применения компьютеров в управлении являются системы автоматического управления (САУ). Объектами управления в этом случае чаще всего выступают технические устройства (станок, ракета, химический реактор, ускоритель элементарных частиц).
В САУ все операции, связанные с процессами управления (сбор и обработка информации, формирование управляющих команд, воздействие на управляемый объект) происходят автоматически, без непосредственного участия человека.
Простые автоматы
Устройства автоматического управления стали создаваться задолго до появления первых ЭВМ. Как правило, они основаны на использовании каких-либо физических явлений. Например, автоматический регулятор уровня воды в баке основан на выталкивающем действии воды на поплавок регулятора; автоматические предохранители в электрических сетях основаны на тепловом действии электрического тока; система автоматического регулирования освещенности в помещении использует явление фотоэффекта. Существуют и более сложные примеры бескомпьютерного автоматического управления.
Преимущество компьютерных систем автоматического управления перед такими устройствами в их большей «интеллектуальности», в возможности осуществлять более сложное управление, чем простые автоматы.
ЦАП — АЦП преобразование
Рассмотрим ситуацию, в которой объектом управления является техническое устройство (лабораторная установка, бытовая техника, транспортное средство или промышленное оборудование), а управляющим объектом — система автоматического управления.
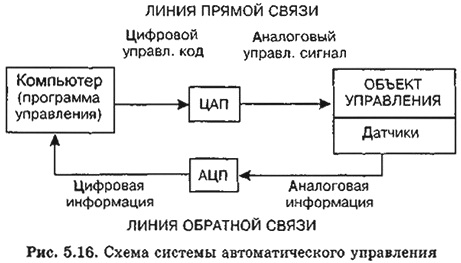
Компьютер работает с двоичной информацией, помещенной в его память. Управляющая команда, выработанная программой, в компьютере имеет форму двоичного кода. Чтобы она превратилась в физическое воздействие на управляемый объект, необходимо преобразование этого кода в электрический сигнал, который приведет в движение «рычаги» управления объектом. Такое преобразование из двоичного кода в электрический сигнал называют цифро-аналоговым преобразованием. Выполняющий такое преобразование прибор называется ЦАП (цифро-аналоговый преобразователь).
Приборы, которые дают информацию о состоянии объекта управления, называются датчиками. Они могут показывать, например, температуру, давление, деформации, напряженности полей и пр. Эти данные необходимо передать компьютеру по линиям обратной связи. Если показания датчиков имеют аналоговую форму (электрический ток или потенциал), то они должны быть преобразованы в двоичную цифровую форму. Такое преобразование называется аналого-цифровым, а прибор, его выполняющий, — АЦП (аналого-цифровой преобразователь)*.
*О ЦАП- и АЦП-преобразованиях речь уже шла в учебнике 8 класса (§ 24).
Все сказанное отражается в схеме, приведенной на рис. 5.16. Такая система работает автоматически, без участия человека.
Управление в режиме реального времени
Системы автоматического управления работают в режиме реального времени. Легко понять, что всякая управляющая команда должна быть отдана вовремя. Любой процесс происходит с какой-то скоростью, в каких-то временных рамках.
Режим, при котором управляющая система работает синхронно с объектом управления, называется режимом реального времени.
При составлении программ управления в реальном времени программистам приходится решать вопрос не только о том, в каком порядке отдавать команды, но и в какие моменты времени это делать. Значит, система управления должна взаимодействовать с прибором, отмеряющим время: часами, таймером.
Напомним, что в составе персонального компьютера есть устройство, называемое генератором тактовой частоты. Работа всех узлов компьютера синхронизируется по тактовой частоте. Вот на эти «часы» и ориентируется программа управления в режиме реального времени.
Контроллеры и микропроцессоры в САУ
Не следует думать, что в системах автоматического управления всегда используется универсальный компьютер с полным комплектом всех устройств (клавиатура, дисплей и пр.). Конечно, бывает и такое, но очень часто для этих целей применяются специализированные устройства — контроллеры. В их состав обязательно входят процессор, память и необходимые средства связи с объектом управления. Если управляющая система все время должна работать по одной и той же программе, то эта программа хранится в постоянной памяти (ПЗУ).
В простейших случаях для автоматического управления используются микропроцессоры, встроенные в управляемое устройство. Например, очень часто микропроцессоры применяются в транспортных средствах: автомобилях, самолетах, поездах. Каждый микропроцессор выполняет свою отдельную функцию, управляет работой определенного узла. Например, в автомобилях используется микропроцессор, управляющий работой карбюратора — устройства, регулирующего подачу топлива в двигатель. Такое автоматическое управление снижает расход горючего, повышает КПД двигателя.
Современные самолеты «нашпигованы» многочисленной электроникой: от микропроцессоров, управляющих отдельными приборами, до бортовых компьютеров, прокладывающих маршрут полета, т. е. выполняющих функции штурмана.
Коротко о главном
Автоматизированные системы управления (АСУ) помогают человеку в сборе информации и принятии управляющих решений.
В системах автоматического управления (САУ) все операции, связанные с процессами управления, происходят автоматически, без непосредственного участия человека, по заранее составленной программе.
В САУ на линии прямой связи для преобразования двоичной информации в аналоговый сигнал используется прибор ЦАП (цифро-аналоговый преобразователь); на линии обратной связи для преобразования аналогового сигнала в двоичный код используется прибор АЦП (аналого-цифровой преобразователь).
Управление в САУ происходит в режиме реального времени.
Вопросы и задания
1. В чем различие между автоматизированными системами управления (АСУ) и системами автоматического управления (САУ)?
2. Какие аппаратные компоненты входят в систему управления техническим устройством с помощью компьютера?
3. Для чего нужны устройства ЦАП и АЦП?
4. Что такое управление в режиме реального времени?
5. Приведите примеры использования встроенных в оборудование микропроцессоров.
И. Семакин, Л. Залогова, С. Русаков, Л. Шестакова, Информатика, 9 класс
Отослано читателями из интернет-сайтов
Основы информатики, подборка рефератов к урокам информатики, скачать рефераты, уроки информатики 9 класс онлайн, домашняя работа
Если у вас есть исправления или предложения к данному уроку, напишите нам.
Если вы хотите увидеть другие корректировки и пожелания к урокам, смотрите здесь - Образовательный форум.

Самохо́дно-артиллери́йская устано́вка (САУ, разговорное Самохо́дка, уст. Артсамохо́д) — это боевая машина, представляющая собой артиллерийское орудие, смонтированное на самодвижущемся шасси. В широком смысле слова все вооружённые пушками боевые машины могут рассматриваться как САУ. Однако в узком смысле к САУ относятся колёсные и гусеничные боевые машины с пушечным или гаубичным вооружением, не являющиеся танками или бронеавтомобилями. Виды и назначение САУ очень многообразны; они могут быть как бронированными, так и небронированными, использовать колёсное или гусеничное шасси, иметь башенную или фиксированную монтировку орудия. Некоторые из САУ с башенной установкой орудия очень сильно напоминают танк, однако они отличаются от танка балансом «броня-вооружения» и тактическим применением.
История самоходно-артиллерийских установок начинается вместе с историей пушечных тяжёлых бронеавтомобилей в начале 20-го столетия и развитием танков в Первой мировой войне. Более того, с сегодняшней точки зрения первые французские танки «Сен-Шамон» и «Шнейдер» являются аналогом более поздних САУ класса штурмовых орудий, нежели настоящими танками. Середина и вторая половина XX века были временем бурного развития разнообразных самоходно-артиллерийских установок в ведущих промышленно- и военноразвитых странах. Достижения военной науки начала XXI века (высокая точность огня, электронные системы позиционирования и наведения) позволили САУ по мнению некоторых специалистов занять ведущее место среди прочей бронетехники (которое раньше безраздельно принадлежало танкам). Даже более сдержанные оценки признают высокую роль самоходной артиллерии в условиях современного боя.
Содержание
Отличия САУ от танков
САУ созданы для выполнения других задач, нежели танки, поэтому имеют значительные отличия от них.
Самоходные артиллерийские установки имеют значительно большую дальность, нежели танковые пушки, и им не требуется так близко приближаться к противнику, поэтому они сталкиваются с меньшим огневым противодействием — что определяет несколько меньший уровень защиты и значительно большие габариты (в частности — высота). Броня САУ предназначена, прежде всего, для защиты от стрелкового оружия десантных и разведывательных подразделений противника, что определяет отсутствие динамической и активной защиты.
При этом мощность вооружения артиллерийских установок значительно больше, нежели у танков. Это определяет большую длину и вес ствола, более совершенное навигационное и прицельное оборудование, наличие баллистических вычислителей и других вспомогательных средств, улучшающих эффективность стрельбы.
Отличается и тактика применения САУ, нежели танков («ударил — отступил», атака из засад и т. д.)
Классификация самоходно-артиллерийских установок
В процессе развития САУ дифференцировались по виду решаемых с их помощью боевых задач и могут быть разделены на следующие классы:

- Истребители танков — специализированные для борьбы с бронетехникой боевые машины. Как правило, самоходки этого класса вооружаются длинноствольным полуавтоматическим орудием среднего калибра (57 — 100 мм) с унитарным заряжанием для повышения скорострельности. Тяжёлые истребители танков могут быть оснащены длинноствольными орудиями крупного калибра (120—155 мм) с раздельным заряжанием и предназначены для борьбы с тяжёлыми танками и аналогичными САУ противника. САУ этого класса относительно неэффективны против пехоты и укреплений. Наибольшее развитие истребители танков получили во время Второй мировой войны (характерными представителями являются советская САУ СУ-100 и немецкая «Ягдпантера»), но в настоящее время они вытеснены многочисленными ракетными противотанковыми системами и боевыми вертолётами, которые являются более эффективными противотанковыми средствами.

- Штурмовые орудия — полностью бронированные машины для огневой поддержки танков и пехоты, действующие в их боевых порядках. Вооружены крупнокалиберным орудием (105—203 мм, как короткоствольным, так и длинноствольным), эффективным против укреплений и пехоты. Эти САУ нередко с успехом использовались против танков. Наибольшее развитие получили во время Второй мировой войны в Германии (StuG III, StuH 42, Brummbar) и Советском Союзе (СУ-122, ИСУ-152). В послевоенное время развитие линии основного боевого танка привело к его вооружению крупнокалиберным орудием, которое способно успешно поражать укрепления и небронированные цели. Как результат, штурмовые орудия исчезли из рядов современных армий, а их функции успешно выполняют основные боевые танки.

- Самоходные гаубицы — мобильные орудия для стрельбы с закрытых позиций (самоходный аналог классической буксируемой артиллерии). Вооружаются самыми разнообразными артсистемами калибров 75 — 406 мм, имеют относительно легкое, противоосколочное бронирование, предназначенное, в основном, для защиты от контрбатарейного огня противника. Активно развиваются с самого начала истории самоходной артиллерии вплоть до настоящего времени. Оснащение этих САУ новейшими системами позиционирования и наведения в сумме с высокой мобильностью делают их одними из самых совершенных боевых систем. Особое значение имеют САУ калибром 152 мм и выше — они способны наносить удары тактическими ядерными боеприпасами, что позволяет всего одной машине уничтожать крупные объекты и группировки войск противника. Выдающимися историческими представителями самоходок данного класса являются немецкие машины времен Второй мировой войны Hummel, американские M7 (Priest) и M12, британские Bishop. Современная Российская Армия имеет на вооружении одну из лучших машин этого класса — 152.4-мм 2С19 «Мста-С». Её аналогом в армиях стран НАТО является 155-мм САУ «Паладин».

- Противотанковые САУ — открытые или полуоткрытые машины с монтировкой противотанкового орудия среднего или малого калибра (37 — 128 мм) на базе легкобронированного (и как правило устаревшего, но хорошо отлаженного в производстве) танкового шасси. Отличаются отличным соотношением «эффективность / стоимость», выпускались в значительных количествах, но проигрывают по характеристикам более специализированным боевым машинам. Хорошим примером являются немецкая машина Второй мировой войны Marder II и отечественная СУ-76М. В современных армиях не применяются.

- Зенитные самоходные установки (ЗСУ) — специализированные пушечно-пулемётные машины для борьбы с низколетящими и средневысотными самолётами и вертолётами противника. Вооружены как правило автоматическими пушками малого (20 — 40 мм) калибра и/или крупнокалиберными пулеметами (12.7 — 14.5 мм). Оснащаются сложными системами наведения по быстролетящим целям; иногда в качестве дополнительного средства вооружены ракетами класса «земля-воздух». Исключительно эффективны против больших масс пехоты и в городских боях. Выдающимися представителями времен Второй мировой войны являются немецкие ЗСУ Ostwind, советская ЗСУ-37. На вооружении современной Российской Армии находятся одни из самых совершенных машин этого класса — ЗСУ-23-4 «Шилка» и ракетно-пушечная ЗСУ «Тунгуска».

Боснийская ЗСУ-57-2 с кустарной бронерубкой сверху, что предпологает её использование в качестве орудия поддержки пехоты.
- Эрзац- или суррогатные САУ — импровизированные машины на базе коммерческих грузовиков, сельскохозяйственных тракторов и артиллерийских тягачей, иногда вообще без бронирования. Наиболее широко применялись нацистской Германией и фашистскойИталией во Второй мировой войне от недостатка иной бронетехники. Наиболее известной отечественной машиной этого класса является 57-мм противотанковая САУ ЗиС-30 на базе лёгкого гусеничного легкобронированного артиллерийского тягача Т-20 «Комсомолец».
Большинство отечественных САУ времён Великой Отечественной войны, таких как ИСУ-152, успешно совмещали в себе функции нескольких классов. Немецкая школа конструирования акцентировалась на узкой специализации САУ, в своих классах некоторые немецкие самоходки являются одними из лучших машин своего времени.
Тактика применения САУ

Основными областями применения самоходно-артиллерийских установок являются задачи поддержки артиллерийским огнем с закрытых огневых позиций частей и подразделений других родов войск. Благодаря высокой мобильности САУ способны сопровождать танки в ходе глубоких прорывов вглубь обороны противника, резко повышая боевые возможности прорвавшихся танковых и мотопехотных подразделений. Та же мобильность делает возможным внезапное нанесение артиллерийских налётов по противнику силами самоходной артиллерии самостоятельно, без помощи иных родов войск. Для этого заранее методом полной подготовки рассчитываются все данные для стрельбы, САУ выдвигаются на огневую позицию, ведут огонь по противнику без пристрелки и иногда даже без корректировки, затем уходят с огневой позиции. Таким образом, когда противник определит местоположение огневой позиции и примет меры, самоходок там уже не будет.
В случае прорыва вражеских танков и мотопехоты самоходки с успехом могут использоваться как противотанковое средство. Для этого в их боекомплекте есть специальные типы снарядов, таких как управляемый крылатый 152.4-мм артиллерийский снаряд «Краснополь». В последнее время САУ освоили новое для себя применение в роли мощнейшей «противоснайперской винтовки», уничтожая вражеских снайперов в весьма трудных для остальных огневых средств укрытиях.
Вооружённые тактическими ядерными снарядами, одиночные САУ способны уничтожать крупные объекты, такие как аэродромы, железнодорожные станции, укреплённые населённые пункты и скопления войск противника. При этом их снаряды практически не поддаются перехвату, в отличие от тактических ядерных ракет или самолётов с ядерными боеприпасами. Однако, радиус возможных поражаемых целей и мощность ядерного взрыва артиллерийских боеприпасов существенно меньше, чем у авиации или тактических ракет.
Компоновка САУ

Наиболее распространённые в настоящее время самоходные гаубицы как правило строятся либо на базе лёгких многоцелевых легкобронированных гусеничных машин, либо на базе танковых шасси. Однако и в том и в другом случае компоновка узлов и агрегатов практически одинакова. В отличие от танка, башенная установка орудия располагается не в средней, а в задней части бронекорпуса машины для более удобной подачи боеприпасов с грунта. Соответственно моторно-трансмиссионная группа располагается в средней и передней части бронекорпуса. Из-за расположения трансмиссии в носовой части машины ведущими являются передние колёса (у современных танков, как правило, наоборот — ведущие колеса располагаются сзади). Рабочее место механика-водителя (отделение управления) находится рядом с коробкой передач по центру или левому борту машины, двигатель располагается между отделением управления и боевым отделением. В боевом отделении находится расчёт орудия, боезапас, механизмы и устройства наводки орудия.
ЗСУ по своим компоновочным решениям довольно разнообразны: для них может использоваться как описанный выше вариант компоновочной схемы самоходной гаубицы, так и размещение узлов и агрегатов по танковому образцу. Иногда ЗСУ представляет собой танк, у которого штатная башня заменена на специальную со скорострельными орудиями ПВО и системами наведения. Существуют конструкции на тяжёлых автомобильных шасси, например чешская 152-мм самоходная пушка-гаубица vz.77 «Дана» на шасси автомобиля Tatra-815 с колёсной формулой 8×8.
Краткая история развития САУ
Ранний период развития (1914—1939)

В начале своего развития самоходно-артиллерийские установки представляли широкий конгломерат различных конструктивных идей и их воплощений в металле. На полях сражений Первой мировой войны применялись артиллерийские орудия, установленные на шасси коммерческих грузовиков, сельскохозяйственных тракторов и даже на гусеничных шасси, приводимых в движение электроэнергией по проводам от внешнего генератора (при ничтожно малых продвижениях в условиях позиционной войны это было неудивительно). Однако развитие танков определило дальнейший ход конструкторских поисков — пришло осознание того факта, что танковая база является наиболее подходящей для монтажа мощных артиллерийских систем. Не были забыты и орудия на небронированных автошасси — в то время они обладали гораздо большей мобильностью, чем тихоходные танки и могли оперативно перебрасываться на наиболее опасные участки боевых действий.
В России проект сверхтяжёлой сильнобронированной САУ для борьбы с укреплениями врага был предложен В. Д. Менделеевым, сыном знаменитого химика Д. И. Менделеева. В Первую мировую и гражданскую войны активно использовались самоходные «противоаэропланные» 76.2-мм орудия Ф. Ф. Лендера на базе грузовиков «Руссо-Балт». Часть из них имела даже частично бронированные кабины.
В 20-е годы XX века с самоходными артиллерийскими установками активно экспериментировали в Советском Союзе, Германии. Известный танковый конструктор У. Кристи построил ряд прототипов САУ в США. Однако большинство этих проектов можно классифицировать как суррогатные САУ на автомобильных или тракторных шасси — сказывалась нехватка или отсутствие промышленной базы и достаточного количества танков.
В последующее десятилетие СССР и нацистская Германия создали многочисленные танковые силы и появилась возможность задействовать танковые шасси для создания САУ. В СССР создали экспериментальные прототипы тяжёлых САУ СУ-14 на базе тяжёлых танков Т-35 и Т-28, выпустили мелкой серией самоходки непосредственной поддержки пехоты на базе лёгкого танка Т-26 и танкетки Т-27. В Германии для переделки под САУ использовали устаревшие лёгкие танки Pz Kpfw I. В других странах САУ рассматривались как суррогат танков и практически не использовались.
Вторая мировая война (1939—1945)

Полномасштабный мировой конфликт потребовал от воюющих сторон полного использования всех имеющихся ресурсов. Первой с этим столкнулась Германия — многие устаревшие и трофейные танки были переделаны в САУ, на базе собственных современных машин создавались более дешёвые и простые в производстве самоходно-артиллерийские установки. Широко известны выдающиеся немецкие штурмовые орудия StuG III и StuG IV на базе Pz Kpfw III и Pz Kpfw IV соответственно; самоходные гаубицы Wespe, истребители танков Elefant (до 27 февраля 1944 года назывались «Фердинанд»), «Ягдпантера» и «Ягдтигр». Начиная со второй половины 1944 года выпуск разнообразных САУ в Германии превысил выпуск танков.
Красная Армия встретила войну, не имея крупносерийных самоходок (хотя некоторые исследователи относят тяжёлый танк КВ-2 к штурмовым орудиям). Однако уже в июле 1941 года была построена суррогатная САУ ЗиС-30, а к концу 1942 года на вооружение поступили первые серийные штурмовые орудия СУ-122. Противоборство с тяжёлой немецкой бронетехникой и укреплениями вызвало к жизни такие выдающиеся образцы советских самоходок, как ИСУ-152 и СУ-100. Все советские САУ того времени (в отличие от сильно специализированных немецких) были универсальными машинами; единственным классом самоходок, в котором не было достойного советского представителя, оказались самоходные гаубицы (в их качестве использовались СУ-122 и СУ/ИСУ-152, но нечасто и с большими неудобствами — так как они были штурмовыми орудиями). Модернизированные СУ-100 и ИСУ-152 находились на вооружении Советской Армии ещё два десятка лет после окончания Второй мировой войны.
Англоамериканские конструкторы сосредоточились в большей степени на развитии класса самоходных гаубиц (M7 Priest, М12, Sexton) и в несколько меньшей на развитии противотанковых САУ (M10 Wolverine, M18 Hellcat, M36 Jackson,
Современный период (1945—н. в.)

Развитие концепции основного боевого танка привело к исчезновению класса штурмовых орудий. Многочисленные ракетные противотанковые системы и боевые вертолёты сделали устаревшими истребители танков. Как результат, дальнейшее развитие получили самоходные гаубицы и зенитные самоходные установки. В СССР бурное развитие ракетных технологий негативно сказалось на развитии ствольной артиллерии, но к началу 70-х гг. XX века САУ-заслуженным ветеранам Великой Отечественной войны пришли на смену современные артиллерийские комплексы 122-мм 2С1 «Гвоздика», 152.4-мм 2С3 «Акация» и 2С5 «Гиацинт», 203-мм 2С7 «Пион», 240-мм самоходный миномёт 2С4 «Тюльпан». Дальнейшее развитие привело к созданию самых совершенных советских и российских САУ — авиадесантируемой 120-мм 2С9 «Нона» и 152.4-мм 2С19 «Мста-С». Линию развития ЗСУ продолжили комплексы «Шилка» и «Тунгуска».
(САУ) - комплекс устройств, предназнач. для автоматич. изменения одного или неск. параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы) либо оптимизирует определ. критерий качества управления (системы экстрем. регулирования, оптим. управления). При значит. изменениях параметров объекта управления и хар-к возмущений и помех применяются самонастраивающиеся системы. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, к-рые предназначены также для компенсации внеш. возмущающих воздействий, стремящихся нарушить норм. функционирование объекта. Управляющие воздействия вырабатываются устройством управления.
По типу управления САУ подразделяются на замкнутые, разомкнутые и комбинированные. Осн. тип САУ - замкнутые, в к-рых цепь прохождения сигналов образует замкнутый контур, включающий устройство управления и управляемый объект; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь вне зависимости от причин, вызвавших эта отклонения. Такое управление наз. управлением по отклонению. В разомкнутых САУ управление ведётся по жёсткой программе без анализа и учёта к.-л. факторов в процессе работы управляемого объекта - на устройство управления не поступают сигналы, несущие информацию о текущем состоянии объекта управления, иногда измеряются и компенсируются лишь главные из возмущений (помех). Такое управление наз. управлением по возмущению. В комбинированных САУ используются оба эти принципа управления (по отклонению и по возмущению). В САУ сложными технич. системами (напр., производств. и энергетич. комплексами, трансп. средствами) или технологич. процессами с большим числом регулируемых параметров широко применяются средства вычислит. техники - микропроцессоры, ЭВМ, управляющие машины.
Большой энциклопедический политехнический словарь . 2004 .
Полезное
Смотреть что такое "СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ" в других словарях:
система автоматического управления — Система управления, состоящая из автоматических приборов и других устройств, включая, возможно, средства вычислительной техники, выполняющая все установленные для нее функции, необходимые для управления процессом автоматически, т.е. без участия… … Справочник технического переводчика
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ — (САУ) совокупность взаимодействующих устройств управления и управляемого объекта, обеспечивающая достижение целей управления без вмешательства человека в соответствии с заданным алгоритмом. По принципу управления, положенному в основу САУ, их… … Большая политехническая энциклопедия
система автоматического управления — 3.10.55 система автоматического управления (САУ): Система локальной автоматики, функционирующая в автоматическом режиме, при котором функции управления или контроля осуществляются без участия производственного персонала (оперативного персонала… … Словарь-справочник терминов нормативно-технической документации
система автоматического управления — automatinio valdymo sistema statusas T sritis automatika atitikmenys: angl. automatic control system vok. automatisches Steuersystem, n rus. система автоматического управления, f pranc. système de commande automatique, m … Automatikos terminų žodynas
Система автоматического управления (САУ) — Система автоматического управления, в которой цель управления в статических и динамических режимах достигается посредством оптимизации замкнутых контуров регулирования Источник: Ценник 1: Электротехнические устройства Система автоматического… … Словарь-справочник терминов нормативно-технической документации
Система автоматического управления ГТД — совокупность устройств, автоматически обеспечивающих выполнение с требуемой точностью выбранных программ управления газотурбинным двигателем летательного аппарата на установившихся и переходных режимах его работы. С. а. у. ГТД выполняет следующие … Энциклопедия техники
Система автоматического управления компрессорной станции — осуществляет автоматическое регулирование производительности и давления компрессоров, определяемое изменяющимися потребностями сети, а также подстройку под оптимальный режим работы вспомогательного оборудования. Её использование, помимо… … Википедия
Система автоматического управления (САУ) — Система автоматического управления (САУ): комплекс средств микропроцессорной и вычислительной техники, осуществляющей автоматическое управление отдельным или группой оборудования, связанного техническим процессом. Источник: СТО… … Официальная терминология
система автоматического управления блоком «котёл - турбина» — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN boiler turbine control system … Справочник технического переводчика
система автоматического управления непрерывного действия — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN continuous data control system … Справочник технического переводчика
система автоматического управления горелкой — 3.3.1 система автоматического управления горелкой: Система, состоящая, как минимум, из программатора и всех элементов детектора пламени. Примечание Различные элементы системы автоматического управления горелкой могут быть в одном или более… … Словарь-справочник терминов нормативно-технической документации
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).
где: — стационарные значения входного и выходного воздействий;
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:
где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:
где — сила тяжести; — сила сопротивления пружины, — сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):
Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть
перейдем к отклонениям от стационарного состояния:
Пусть при t>0 . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
если , то уравнение принимает вид:
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:
тогда, разделив на k, имеем:
Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:
Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [];
— коэффициент в правой части (): [].
Тогда уравнение (2.1.6) можно записать в операторной форме:
где: — оператор диффренцирования;
-линейный дифференциальный оператор;
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:
Подставляя эти соотношения в уравнение (2.1.2), имеем:
Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие , и, разделив на , получаем:
где: — коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента
Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
На рис. 2.1.4 представлены статические характеристики для механического демпфера:

Процедура нормировки отклонений позволяет привести уравнения динамики к виду:
где дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0

Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:

Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:
Перенесем в левую часть уравнения и запишем уравнение в виде%
где -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:
Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния .
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если , то «простое» разложение функции в ряд Тейлора в окрестности точки будет выглядеть так:
C учетом вышеприведенного разложение принимает вид:
Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.:), оставим в разложении только члены первого порядка малости (линейные). Поскольку , получаем:
Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:
Коэффициенты — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:
где – оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора :
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:
Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>
Если вынести в правой части (2.2.7) коэффициент за общую скобку и разделить все уравнение на , то уравнение принимает вид:
или в операторном виде:
Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.
Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:
Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части — чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:
Подставляя значения x(t) и y(t) в исходное уравнение:
Удаляем полученного уравнения уравнения стационара: , а так же пренебрегая слагаемыми второго прядка малости: , получаем следующее уравнение:
Вводим новые обозначения:
Получаем уравнения в «почти» классическом виде:
Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:
Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:
Переходя к полной символике, имеем:
Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.
где: — решение однородного дифференциального уравнения y_(t) $inline$ - частное решение. $inline$
Будем называть решение однородного дифференциального уравнения , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть , вынужденным, так как эта часть решения определяется внешним воздействием , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
Напомним этапы решения:
1) Если имеется уравнение вида , то сначала решаем однородное дифференциальное уравнение:
2) Записываем характеристическое уравнение:
3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения
4) Тогда собственное решение записывается в виде:
если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:
Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:
5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения. .
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:
7) Используя начальные условия (t = 0), находим значения постоянных интегрирования . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если
Решение. Запишем однородное ОДУ:
Характеристическое уравнение имеет вид: ; Решая, имеем: тогда:
где — неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем как:
Подставляя в исходное уравнение, имеем:
Используя 1-е начальное условие (при t = 0), получаем: , а из 2-го начального условия имеем:
Решая систему уравнений относительно и , имеем:
Тогда окончательно:
Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:
Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).

Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).

Чем отличается
Танк и самоходная артиллерийская установка лишь на первый взгляд могут показаться одинаковыми единицами боевой техники, поскольку обеими управляет экипаж. На самом деле они имеют совершенно разные задачи и конструкцию.
Отличия между танком и САУ
Танк – это военная боевая машина, которая оснащена броней, пушечным и пулеметным орудием, вращающейся башней и гусеничным механизмом. Возможны иные модификации и компоновки, поскольку танки отличаются по весовой категории, числу башен, роду войск и др.
Самоходная артиллерийская установка (САУ или самоходка) представляет собой артиллерийское орудие, в основе которого содержится самодвижущееся шасси. Фактически все боевые машины за исключением танков, БМП (боевая машина пехоты), БТР (бронетранспортер) и БМД (боевая машина десанта) входят в категорию САУ.
Главное отличие самоходки от танка состоит в том, что данные виды техники имеют совершенно разные задачи. В то время как танки принимают активное участие в бою, находятся на первой линии, совершают атаки и боевые прорывы, САУ оказывают поддержку и занимают закрытые позиции.

Традиционная компоновка Т-34
Сравнение боевых машин можно провести по следующим критериям:
- артиллерийское орудие;
- степень защиты;
- стрельба, мощность вооружения.
САУ и танки оснащаются различными артиллерийскими орудиями. Танковая пушка устанавливается непосредственно в башне (при традиционной компоновке). Зачастую башня свободно вращается в обе стороны. Это позволяет совершать прицельную стрельбу прямой наводкой.
В самоходках башенная установка обычно располагается в задней части корпуса. В большинстве случаев их не оснащают пулеметами. Башня чаще всего не поворачивается, а иногда и вовсе отсутствует – меняется угол наклона орудия по вертикали и горизонтали. Возможность наклона и поворота орудия ограничена, поэтому для наведения самоходка поворачивает корпус.
Конструкция САУ предполагает большую дальность стрельбы. Так как они не вступают в прямой контакт с противником, то и оснащены менее тяжелой броней. Защита рассчитана в первую очередь на стрелковое оружие.

Компоновка САУ Су-76
Танки имеют более надежный уровень защиты, который зависит от типа боевой машины (легкие, средние, тяжелые) и целей, которые перед ней поставлены. Экипаж танка должен быть надежно защищен от ракетных выстрелов и мощных снарядов.
Броня танка состоит из нескольких слоев. Она изготавливается из комплекса различных материалов – стали, керамики и др., которые обеспечивают высокую прочность. Также дополнительно присутствует защита от ядерного излучения, осколков.
Танки оснащаются и специальными экранами в виде тонких железных либо жестяных листов. Благодаря их установке под определенным углом, снижается шанс пробития брони снарядом – происходит рикошет.
Современные танки оборудованы различными механизмами защиты, которые позволяют экипажу заранее распознать и предотвратить угрозу. Например, динамическая система отстрела снарядов.

Фото пробития брони танка
Когда данная система обнаруживает приближающиеся ракеты, снаряды, гранаты и прочие боеприпасы, срабатывают разные поля (кинетические, электромагнитные). Они ослабляют действие снарядов. Данная система помещается в специальные контейнеры из металла, которые устанавливаются поверх основной брони.
Стрельба из орудия танка осуществляется практически по прямой траектории. Самоходки стреляют под навесом – то есть снаряд падает на цель сверху вниз. Мощность выстрела у САУ значительно выше, чем у танка.
Для самоходок меткость имеет огромное значение. Поэтому артиллерийские установки у них оснащены более совершенным прицельным оборудованием, улучшенной навигацией и прочими средствами, которые повышают эффективность стрельбы. Также орудие имеет больший вес и длину.
Военная техника СССР и России
Среди САУ СССР лучшим образом себя зарекомендовали:
Су-76 создали на базе ЛТ Т-70 в количестве 13 тысяч. Она обрела широкую распространенность благодаря универсальной пушке, высокой скорости и открытой рубке. Среди минусов – слабая броня.
Су-85 построили в 1943 на базе танка Т-34. Считается первой самоходкой, которая была на уровне немецкой техники. Позже возникла необходимость в более мощных САУ – так появилась машина Су-100, главным достоинством которой стала пушка Д-10С. Стреляя фугасами, она легко справлялась с вражескими танками в городских условиях.
Су-152 и ИСУ-152 называли близнецами, хоть и появились они в разное время. Самоходки отличались высокой мощностью – они могли легко не только пробить броню противника, а и взорвать боекомплект, причинив непоправимый урон. ИСУ-152 выигрывала еще и за счет лучшей подвижности.
Интересный факт: мощные советские САУ называли «зверобоями», так как они эффективно сражались против немецких «пантер» и «тигров».
На вооружении РФ имеются САУ различного типа: артиллерийские, противотанковые, самоходные пушки. Большинство из них начали разрабатывать еще во времена СССР. Например, «Спрут-СД», «Вена», «Хоста» и др.
Спрут-СД или объект 952 – авиадесантная САУ, направленная на борьбу с бронетехникой противника. «Вена» используется с целью подавления батарей, ракетных установок и прочих объектов. «Хоста» – модернизированный вариант 2С1 «Гвоздики». Используется как и «Вена». Содержит элементы нескольких ранее созданных боевых машин.
Среди танков СССР настоящими легендами стали Т-34, ИС, Т-26, Т-70, КВ-85, КВ-1 и др. На вооружении в разные периоды времени стояли боевые машины всех типов – легкие, средние, тяжелые. Во время Второй мировой они оказывали должное сопротивление немецким танкам.
Особенно стоит отметить Т-34, который стал эталоном своего времени. Конструкторам удалось грамотно совместить подвижность, защиту, огневую мощь боевой машины. А «тяжи» вроде ИС и последующие модификации еще больше поражали немцев – снаряды отскакивали от их брони.
Современные танки РФ – универсальная боевая платформа «Армата», Т-90, Т-80, Т-72 и Т-64. Созданы они на основе других боевых машин, успешно зарекомендовавших себя ранее. Либо же конструкторами взяты отдельные элементы: корпуса, орудия и т.п.

Универсальная боевая платформа “Армата”
Танки принимают активное участие в боевых действиях, обладают надежной защитой, маневренностью. САУ – менее защищенные, наносят более точные удары и мощный урон, занимают скрытые позиции. Танки и САУ – боевые машины с разной задачей и оснащением.
Если Вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Читайте также: